Изобретение относится к электротехнике, а точнее к электрическим машинам для бытовой техники, например для стиральных машин и компрессоров холодильников, и предназначено для управления однофазными индукторными электродвигателями со стартовыми полюсами.
Известен электропривод на базе однофазного индукторного двигателя, имеющего постоянные магниты для обеспечения стартового положения ротора при пуске. Способ управления указанным двигателем состоит в том, что в однофазную обмотку подаются импульсы тока при прохождении роторов угловых положений, в которых созданный возбужденными полюсами электромагнитный момент на ротор совпадает по направлению с направлением его вращения. Названные взаимные положения ротора и статора регистрируются датчиком положения ротора. По полученной информации микропроцессор вырабатывает команды управления коммутатором, питающим обмотку двигателя (Патент США N 4616165, H 02 P 1/, 1986).
Недостатком данного способа управления однофазным индукторным электродвигателем является неспособность осуществлять реверсивное вращение ротора.
Известен однофазный индукторный электродвигатель с основными и дополнительными полюсами на статоре и электронным управлением. На дополнительных полюсах размещены катушки, включенные встречно, устанавливающие ротор в стартовое положение и выполняющие функции датчика положения ротора. Дополнительные полюса сдвинуты с оси симметрии основных полюсов в направлении вращения ротора. Способ управления двигателем состоит в том, что пуск двигателя осуществляется включением катушек дополнительных полюсов, устанавливающих ротор в стартовое положение, а затем по сигналам от обмоток дополнительных полюсов, регистрирующих прохождение зубцов ротора в зоне действия электромагнитного момента заданного направления, электронным коммутатором подаются импульсы тока в основную обмотку (Патент ФРГ N 4012561, H 02 P 7/622, H 02 K 19/04, от 20.04.90).
Недостатком данного способа управления однофазным индукторным электродвигателем с дополнительными полюсами является ненадежный пуск двигателя вследствие встречного, то есть трансформаторного, включения катушек дополнительных полюсов и неспособность осуществлять реверсивное вращение.
Целью изобретения является обеспечение надежного пуска и реверса однофазного индукторного электродвигателя со стартовыми полюсами.
Цель достигается способом управления однофазным индукторным электродвигателем со стартовыми полюсами, состоящем в опережающем включении обмотки стартовых полюсов по отношению к включению обмотки управления основных полюсов, а затем подаче токовых импульсов от электронного коммутатора в обмотку управления основных полюсов по сигналам от датчика положения ротора при вращении ротора по направлению от стартового полюса к ближайшему основному, причем согласно изобретению катушки обмотки стартовых полюсов включают согласно, при пуске в противоположном направлении, совпадающем с направлением вращения ротора от основного полюса к ближайшему стартовому полюсу, независимо от сигнала датчика положения ротора первое включение осуществляют подачей тока в обмотку управления, затем по сигналу датчика положения ротора на включение обмотки управления подают ток в стартовую обмотку и отключают обмотку управления, далее отключают стартовую обмотку по приходу сигнала датчика положения ротора, запрещающего включение обмотки управления, а затем подают токовые импульсы в обмотку управления по инвертированным сигналам датчика положения ротора.
Цель достигается также другим способом управления, в котором, в отличие от предыдущего, исключается возможность попадания неподвижного ротора при пуске в мертвую зону, т.е. в зону с электромагнитным моментом, близким к нулю. Такие мертвые зоны имеются как у основного полюса, так и у стартового. С этой целью с использованием логических устройств проверяется выставление ротора в стартовое положение, которое может быть как по отношению к стартовому полюсу, так и по отношению к основному полюсу, что определяется выбранным направлением вращения. Так, при пуске в направлении от стартового полюса к ближайшему основному первый импульс подается в стартовую обмотку. В случае попадания ротора в мертвую зону зубец стартового полюса находится напротив паза ротора, при этом подается импульс в обмотку управления основных полюсов, после чего вновь подается импульс в стартовую обмотку, устанавливающую ротор в стартовое положение. За счет выполнения магнитной системы несимметричной мертвые зоны основного и стартового полюсов смещены относительно друг друга. Именно это позволяет указанной последовательностью включений обмоток полюсов обеспечить надежное выставление ротора в стартовое положение даже при наличии значительного по величине момента трения покоя.
Попадание ротора в мертвую зону при первом включении обмотки стартового полюса регистрируются датчиком положения ротора, после чего логическим устройством, например микропроцессором, вырабатываются последующие команды на включение обмоток. При реверсивном вращении порядок включения обмоток полюсов, соответственно, меняется.
На фиг. 1 показан однофазный индукторный электродвигатель со стартовыми полюсами; на фиг. 2 схема электронного коммутатора; на фиг. 3 зависимости электромагнитных моментов, создаваемых основными и стартовыми полюсами, при изменении углового положения ротора.
Однофазный электродвигатель индукторного типа, показанный на фиг. 1, состоит из магнитопровода статора 1 с основными 2, 3 и стартовыми 4, 5 полюсами с размещенными на них катушками соответственно 6, 7 и 8, 9, ротора 10 с зубцами 11. На полюсах 2, 3 статора 1 имеются зубцы 12 и пазы 13. Оси стартовых полюсов 4, 5 по воздушному зазору смещены с оси симметрии статора в одном направлении так, что ось по воздушному зазору каждого из них образует с осью ближайшего зубца статора угол α 1,4 tz, где tz угловое зубцовое деление ротора.
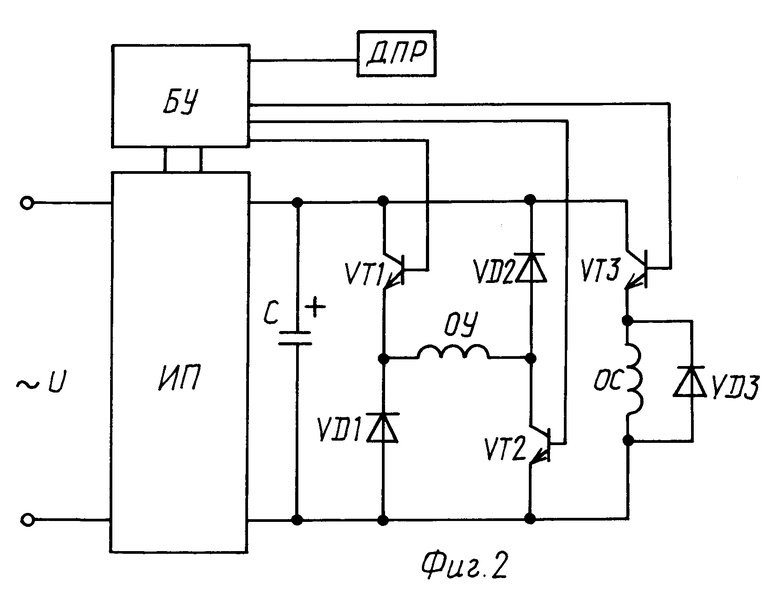
Электронный коммутатор, показанный на фиг. 2, состоит из блока управления (БУ), работающего по командам датчика положения ротора (ДПР), основной обмотки управления (ОУ), состоящей из катушек 6 и 7 (фиг. 1), стартовой обмотки (ОС), состоящей из катушек 8 и 9 (фиг. 1), источника питания (ИП) и фильтровой емкости С, инвертора, состоящего из ключей VT1, VT2, VT3 и диодов VD1, VD2, VD3.
Катушки 8 и 9 включены согласно. Это обеспечивает значительный синхронизирующий момент для установки ротора в стартовое положение и позволяет использовать его для реверсивного пуска двигателя.
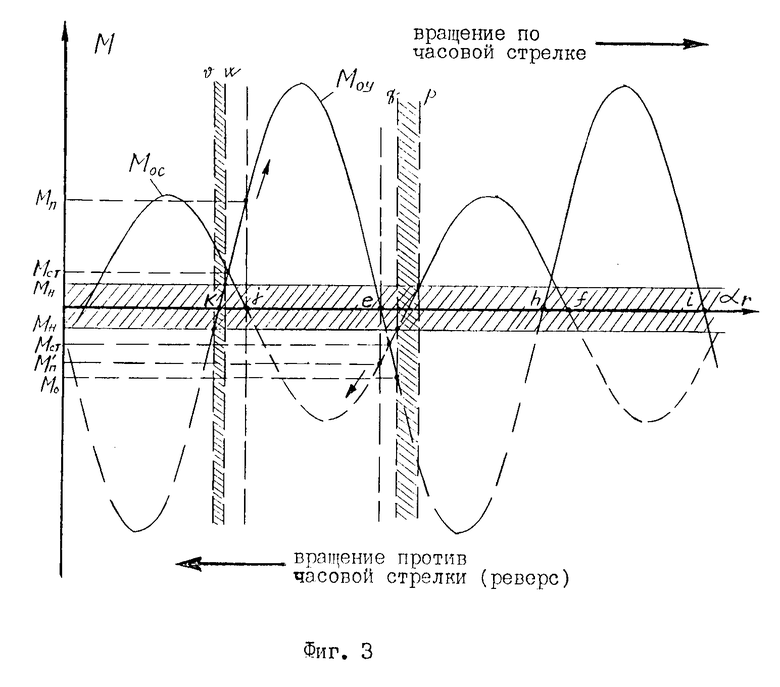
Рассмотрим пуск и вращение ротора по часовой стрелке (фиг. 1). При пуске обмотка управления 6 и 7 обесточена. Ротор устанавливается в стартовое положение синхронизирующим моментом Мос от стартовых полюсов 4 и 5, по катушкам которых 8 и 9 протекает ток при включении ключа VT3. Длительность протекания тока в ОС должна быть достаточной для установки ротора в стартовое положение. В результате ротор устанавливается в стартовое положение, в котором ось зубцов 11 ротора 10 совпадает с осью возбужденных стартовых полюсов 4 и 5. Этому положению ротора на фиг. 3 соответствует точка j. При подаче БУ команды на открытие ключей VT1 и VT2 в обмотке управления начинает протекать ток. При этом подается команда на открытие ключа VT3 и ток в ОС затухает в контуре, образованном ОС и обратным диодом VD3. Для обеспечения однонаправленного пуска и вращения ротора по направлению часовой стрелки стартовые полюса 4, 5 смещены с оси симметрии статора 1 по направлению вращения так, что ось стартового полюса 4 по воздушному зазору составляет с осью ближайшего зубца 12 основного полюса 2 статора угол a 50 геометрических или 500 электрических градусов. Аналогично смещен другой стартовый полюс 5. В этом случае при подаче тока в ОУ основными полюсами 2, 3 создается вращающий момент Мп, действующий на ротор и направленный по часовой стрелке, то есть от стартового полюса 4 к ближайшему зубцу 12 основного полюса 2. Под действием вращающего момента Мп ротор 10 начинает вращаться. При достижении ротором положения точки e (фиг. 3), в котором ось зубца ротора совпадает с осью зубца основного полюса, по сигналу датчика положения ротора ключи VT1 и VT2 закрываются и ток уменьшается до нуля, возвращая запасенную реактивную энергию в фильтровую емкость C через диоды VD1 и VD2. В противном случае на ротор начнет действовать вращающий момент обратного знака. За счет накопленной кинетической энергии при обесточенных обмотках ОУ и ОС ротор достигает положения точки h (фиг. 3), в котором ось зубца 11 ротора 10 совпадает с осью паза 14 основного полюса. В этом положении БУ подается команда на открытие ключей VT1 и VT2 и в ОУ появляется ток, обеспечивающий при дальнейшем вращении ротора 10 положительный вращающий момент Моу, который увеличивает частоту вращения. При достижении ротором углового положения точки i (фиг. 3), в котором ось зубца 11 ротора совпадает с осью зубца 13 основного полюса, ключи VT1 и VT2 вновь закрываются и т.д. Своевременная подача импульсов тока в ОУ 6, 7 обеспечивается БУ по сигналам от датчика положения ротора относительно статора. Последовательная подача импульсов тока в ОУ увеличивает частоту вращения до необходимого значения. Напряжение на обмотку управления подается от источника питания ИП, например от мостового выпрямителя, к которому параллельно подключена фильтровая емкость C.
Для обеспечения пуска и вращения ротора по направлению против часовой стрелки (фиг. 1), т.е. реверса, порядок питания двигателя должен быть следующим. Ротор устанавливается в стартовое положение синхронизирующим моментом Моу основных полюсов, возникающим при подаче в ОУ тока. Ток в ОУ обеспечивается командой БУ на открытие VT1 и VT2. Стартовым положением ротора при реверсе является такое положение, в котором оси зубцов ротора совпадают с осями зубцов основных полюсов. Этому положению ротора на фиг. 3 соответствует точка е. БУ подает команду на открытие VT3, в результате чего в стартовую обмотку подается ток. Одновременно обмотка ОУ обесточивается закрытием ключей VT1 и VT2. На ротор действует момент, созданный стартовыми полюсами M' и направленный против часовой стрелки. Под действием M' (в точке e по фиг. 3) ротор начинает вращение против часовой стрелки. Стартовая обмотка закрытием VT3 отключается при включении обмотки управления по инвертированному сигналу ДПР. Указанный сигнал ДПР, по которому БУ разрешает открытие VT1 и VT2 для подачи тока в ОУ, поступает при достижении ротором углового положения, соответствующего на фиг. 3 точке k. При этом часть пути, а именно от точки j до точки k (фиг. 3), ротор проходит под действием вращающего момента Мос от стартовых полюсов, направленного против выбранного направления вращения. Однако импульс момента, полученный ротором от стартовых полюсов при перемещении от точки e до точки j, значительно превышает импульс момента при дальнейшем движении за счет запасенной кинетической энергии от точки j до точки k. Это обстоятельство обеспечивает прохождение ротором положения точки k и попадание в зону действия момента Моу, совпадающего по направлению с выбранным направлением вращения.
Для работы БУ при разных направлениях вращения ротора от одного ДПР необходимо при реверсе инвертировать сигнал ДПР. В этом случае при выбранном направлении вращения ротора против часовой стрелки после прохождения ротором положения точки k БУ обеспечит команду на открытие VT1 и VT2. Последовательная подача импульсов тока в ОУ по сигналам ДПР обеспечивает разгон и устойчивое вращение ротора против часовой стрелки. В процессе вращения ротора стартовая обмотка не включается.
Таким образом обеспечивается вращение ротора в любом направлении. При этом стартовая обмотка включается только один раз за цикл работы двигателя в одном направлении.
Ниже предлагается другой способ пуска двигателя, обладающий более высокой надежностью и обеспечивающий пуск даже при наличии значительного момента трения покоя.
При заданном направлении вращения по часовой стрелке и наличии некоторой статической нагрузки Мн (фиг. 3) на валу неподвижного ротора, последний может оказаться в мертвой зоне, ограниченной вертикальными линиями q и p. В этой зоне электромагнитный момент, развиваемый возбужденными стартовыми полюсами 4 и 5, оказывается меньше Мн в силу того, что пазы ротора расположены практически против полюсов 4 и 5. Таким образом, случайно оказавшись в мертвой зоне, ротор не сможет занять необходимого стартового положения для надежного пуска по часовой стрелке. При этом в соответствии с основным режимом работы, описанным выше, в мертвой зоне для полюсов 4, 5 ключи VT1 и VT2 закрыты по командам БУ согласно сигналам ДПР.
Для обеспечения надежного пуска по направлению часовой стрелки в случае остановки ротора в мертвой зоне, о чем будет свидетельствовать сигнал от ДПР после подачи тока в обмотку стартовых полюсов ОС, подается ток в основную обмотку ОУ. Одновременно с этим ОС обесточивается. В этом случае ротор под действием как минимум момента Мо, созданного основными полюсами 2 и 3, перемещается против часовой стрелки на небольшой угол и занимает положение, в котором оси зубцов ротора и зубцов основных полюсов 2 и 3 совпадают. Этому положению ротора на фиг. 3 соответствует точка е. В результате ротор выходит из мертвой зоны стартовых полюсов 4 и 5, после чего ОУ обесточивается. После этого вновь подается ток в стартовую обмотку ОС и ротор под действием момента М', созданного полюсами 4 и 5, перемещается против часовой стрелки до положения, в котором оси зубцов ротора и стартовых полюсов 4 и 5 совпадают. Этому положению ротора на фиг. 3 соответствует точка j. Таким образом, распознав с помощью ДПР попадание ротора в мертвую зону, БУ последовательным включением ОУ и ОС обеспечивает установку ротора в стартовое положение для вращения по часовой стрелке. Дальнейший пуск из стартового положения и разгон осуществляется подачей токовых импульсов в ОУ по сигналам ДПР, аналогично описанному выше пуску и разгону ротора по направлению вращения часовой стрелки.
При вращении против часовой стрелки при первом включении обмотки управления для установки ротора в стартовое положение также возможно попадание ротора в мертвую зону, ограниченную на фиг. 3 вертикальными линиями v и w. Выведение ротора из этой мертвой зоны осуществляется также последовательной подачей двух дополнительных импульсов тока, соответственно, в обмотку ОС, затем в ОУ.
Таким образом обеспечивается пуск в любом направлении вращения при статическом моменте сопротивления на валу Мст (фиг. 3), величина которого зависит от углового сдвига между осями основных и стартовых полюсов. Анализ возникающих при пуске и реверсе ситуаций и выработку необходимых команд управления при практической реализации предлагаемого способа управления осуществляет микропроцессор.
Предложенные способы управления обеспечивают надежный пуск и реверс однофазного индукторного электродвигателя со стартовыми полюсами, что позволяет использовать его для привода различных устройств со сложными условиями пуска.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1993 |
|
RU2079950C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СТАРТОВЫМИ ПОЛЮСАМИ | 1996 |
|
RU2103786C1 |
| СХЕМА ПУСКА ОДНОФАЗНОГО ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1994 |
|
RU2084074C1 |
| ДВУХБАКОВАЯ СТИРАЛЬНАЯ МАШИНА С ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2098531C1 |
| МОТОР-КОМПРЕССОР | 1994 |
|
RU2079714C1 |
| МОТОР-КОМПРЕССОР | 1994 |
|
RU2079712C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ИНДУКТОРНОГО ТИПА | 1992 |
|
RU2040096C1 |
| МОТОР-КОМПРЕССОР | 1994 |
|
RU2079713C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
Использование: в бытовой технике, например для стиральных машин и компрессоров холодильников, и предназначено для управления однофазными индукторными электродвигателями со стартовыми полюсами. Сущность изобретения: при пуске двигателя сначала выполняют включение обмотки стартовых полюсов независимо от сигнала датчика положения ротора, затем включается обмотка управления в соответствии с сигналами от датчика положения ротора, а при реверсе первое включение независимо от сигнала датчика положения ротора осуществляется для обмотки управления, после чего по сигналу датчика положения ротора осуществляют включение обмотки стартовых полюсов и далее, в соответствии с инвертированными сигналами датчика положения ротора, осуществляется питание обмотки управления. При наличии на валу неподвижного ротора момента трения покоя предлагается использовать способ пуска, при котором в отличии от указанного выше перед подачей токовых импульсов в обмотку управления по сигналу от датчика положения последовательно подаются три токовых импульса в стартовую обмотку, обмотку управления и вновь в стартовую. При этом два последних импульса подаются в случае попадания ротора в мертвое положение. При реверсе очередность подачи импульсов меняется. 2 с.п. ф-лы, 3 ил.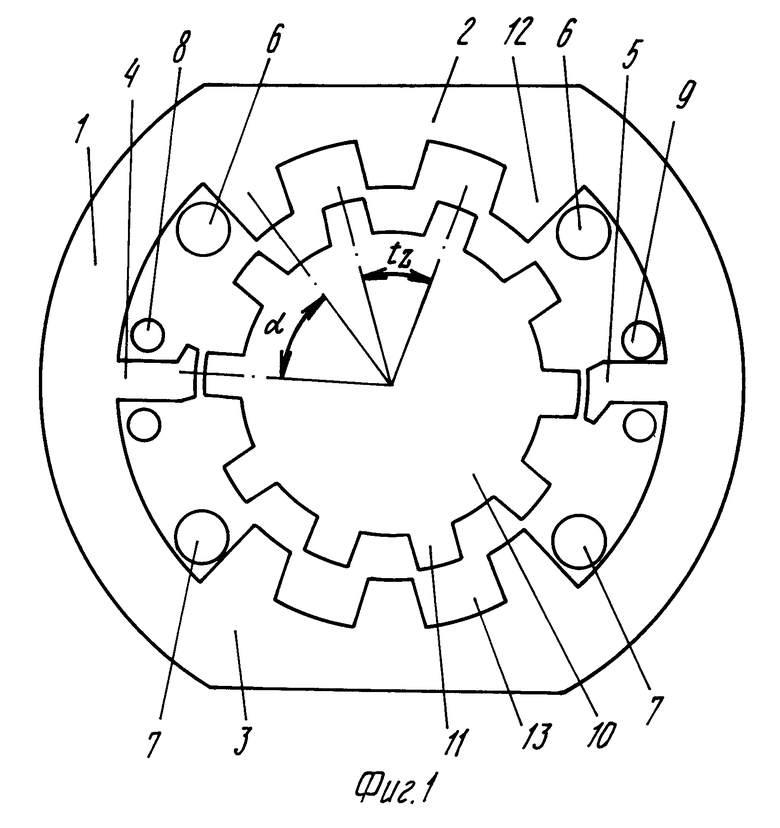
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4616165, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE, патент, 4012561, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

