Изобретение относится к электротехнике, а точнее к способам управления двигателями индукторного типа, имеющими зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых запитывается однополярными импульсами тока от преобразователя частоты, и зубчатый безобмоточный ротор.
Известен способ управления однофазным индукторным двигателем (см. патент США N 4616165 от 7.10.1986).
В данном источнике заявляется индукторный двигатель с системой управления, выполненной на базе микропроцессора. Эта система управления реализует способ управления индукторным двигателем, заключающийся в формировании токов в фазных обмотках двигателя путем подачи на обмотку запитывающих импульсов напряжения внутри каждого периода датчика положения ротора (ДПР), причем интервалы времени Ta и Tb, определяющие моменты времени начала и окончания зоны подачи напряжения соответственно, задаются как функция частоты вращения двигателя табличным способом. Для этого измеряется период сигнала ДПР и по результатам измерения формируется адресный сигнал выборки значений Ta и Tb из постоянного запоминающего устройства (ПЗУ).
Внутри зоны подачи напряжения импульсы напряжения формируются с помощью сигнала датчика тока фазы путем сравнения его с сигналом уставки тока фазы Im. Когда ток фазы достигнет уставки, вырабатывается сигнал закрытия ключа силового преобразователя частоты (ПЧ).
Недостатком данного способа является недостаточная гибкость управления, заключающаяся в возможности настройки такой системы только на один или несколько заранее промоделированных режимов работы двигателя, а также необходимость применения датчика тока каждой фазной обмотки двигателя и устройств обработки их сигналов.
Известен также способ управления индукторным двигателем (см. Патент США N 4707650 от 17.11.1987).
В данном источнике заявляется программируемая замкнутая система управления индукторным двигателем, включающая в себя контур регулирования по обратной связи (ОС), регулятор угла и регулятор тока, выполненная на базе однокристального микроконтроллера. Контур регулирования может быть выполнен с ОС по скорости и/или моменту двигателя. В случае ОС по скорости осуществляется стабилизация частоты вращения двигателя.
В такой системе реализован способ управления, заключающийся в формировании токов в фазных обмотках двигателя. Формирование происходит следующим образом. Заданное значение частоты вращения двигателя Wr* сравнивается с реальным значением частоты вращения Wr, вычисленным с использованием сигнала ДПР. Сигнал о рассогласовании заданной и действительной частот используется в регуляторе уставки фазного тока. Здесь уставка тока регулируется таким образом, чтобы осуществить стабилизацию частоты вращения двигателя. Сигнал уставки фазного тока I* используется также в регуляторе угла, где с его помощью вычисляются угловое значение, соответствующее началу зоны подачи напряжения, и угловая ширина зоны подачи напряжения, а затем с помощью внешних счетчиков/таймеров формируются импульсы разрешения формирования тока, имеющие вышеуказанные вычисленные угловые значения.
Внутри зоны подачи напряжения фазный ток двигателя формируется в регуляторе тока путем сравнения сигнала I* с сигналом датчика тока, причем при превышении током уставки на определенную величину отключается один из ключей ПЧ, обеспечивая медленное спадание тока, а при снижении тока ниже уставки на определенную величину ключ вновь открывается. В конце зоны закрываются оба ключа ПЧ, обеспечивая быстрое спадание тока в фазной обмотке.
Недостатком данного способа является необходимость применения датчиков тока для каждой фазной обмотки двигателя и регулятора тока, а также сложность вычислений при осуществлении стабилизации частоты вращения двигателя и регулировании угла.
Изобретение направлено на повышение гибкости управления индукторным двигателем, а также на упрощение как аппаратной, так и программной части систем управления индукторным двигателем.
Для способа управления индукторным двигателем, заключающегося в том, что формируют токи в двигателе, для чего измеряют периоды сигнала датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, в зависимости от длительности T предшествующего периода датчика положения ротора определяют временные интервалы t1 от начала текущего периода датчика положения ротора до момента появления импульсов напряжения и t2 от начала текущего периода датчика положения ротора до окончания импульсов напряжения, предложены аналитические формулы вычисления в ходе цикла управления временных интервалов t1 и t2, согласно которым интервал t1 определяют в соответствии с формулой:
t1 = T/2-A (1),
где
A - интервал времени, представляющий собой опережение момента подачи первого импульса напряжения относительно момента времени T/2, причем A выбирается таким, что
0 ≤ A ≤ Amax,
где
Amax = T/N (2),
где
N - постоянный коэффициент, выбираемый в пределах 4 ≤ N ≤ 10,
а интервал t2 определяют в соответствии с формулой:
t2 = T-A-C (3),
где
C - интервал времени, представляющий собой укорочение зоны подачи напряжения относительно интервала времени T/2, причем C выбирается таким, что 0 ≤C ≤ Cmax,
где
Cmax = T/N1,
где
N1 - постоянный коэффициент, выбираемый в пределах 12 ≤ N1 ≤ 30;
а при T < T0 - в соответствии с формулой
t2 = XT - (X-1)T0 - A - C (4),
где
T0 - значение периода датчика положения ротора, при котором должно начаться ограничение частоты вращения двигателя; X - постоянный положительный коэффициент, выбираемый тем большим, чем более жесткое ограничение частоты вращения требуется получить.
В частных случаях, описанных ниже, способ может дополнительно характеризоваться одним или несколькими из следующих признаков:
- величина C пропорциональна величине A;
- датчик положения ротора двигателя устанавливают так, чтобы фронт его сигнала, соответствующий началу периода, появлялся тогда, когда зубец ротора расположен напротив зубца статора для режима тяги и напротив паза статора для режима электромагнитного торможения;
- в системах, где формирование фазного тока производится по методу поддержания тока вблизи уставки тока, величину A принимают равной Amax при максимальной уставке фазного тока двигателя и уменьшают ее пропорционально уменьшению уставки;
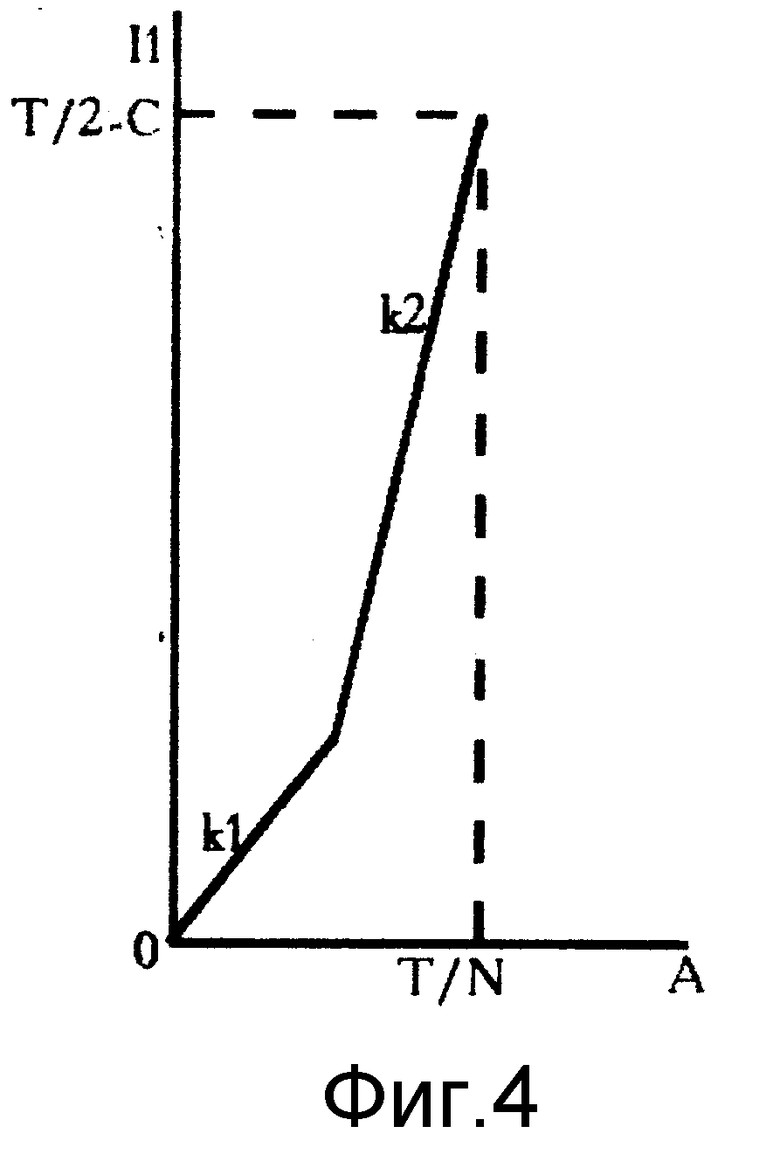
- длительность первого импульса напряжения ставят в такую зависимость от A, что при увеличении A от 0 до Amax длительность первого импульса напряжения возрастает от 0 до ширины всей зоны подачи напряжения, равной T/2-C; длительность второго импульса напряжения, если он имеется, выбирают меньшей и пропорциональной длительности первого; длительность остальных импульсов напряжения, если они имеются, выбирают равными длительности второго импульса или длительность каждого последующего импульса напряжения после второго уменьшают по отношению к длительности предыдущего до достижения определенной минимальной величины, а длительности пауз между импульсами напряжения выбирают равными между собой;
- стабилизируют частоту вращения двигателя путем изменения в вышеуказанных пределах величины A по результатам сравнения, которое производят один раз за период, заданного значения периода датчика положения ротора T* и текущего значения периода датчика положения ротора Tt, которое принимают равным измеренной длительности предыдущего периода T или вычисляют по результатам измерения нескольких последних периодов таким образом, что:
при T* > Tt величину A уменьшают, при T* < Tt - увеличивают, а при  - не изменяют, где e - максимально допустимая погрешность величины текущего периода датчика положения ротора;
- не изменяют, где e - максимально допустимая погрешность величины текущего периода датчика положения ротора;
- стабилизируют частоту вращения двигателя путем изменения в пределах от Dmin до Dmax вспомогательной величины D по результатам сравнения, которое производят один раз за период заданного значения периода датчика положения ротора T* и текущего значения периода датчика положения ротора Tt, которое принимают равным измеренной длительности предыдущего периода T или вычисляют по результатам измерения нескольких последних периодов таким образом, что при T* > Tt величину D увеличивают, при T* < Tt - уменьшают, а при  - не изменяют, а затем величину A вычисляют по формуле:
- не изменяют, а затем величину A вычисляют по формуле:
A = Dmax- D,
где
e - максимально допустимая погрешность величины текущего периода датчика положения ротора,
Dmax = T/Y, Dmin = Dmax- Amax;
где
Y - постоянный положительный коэффициент, причем Y ≤ N.
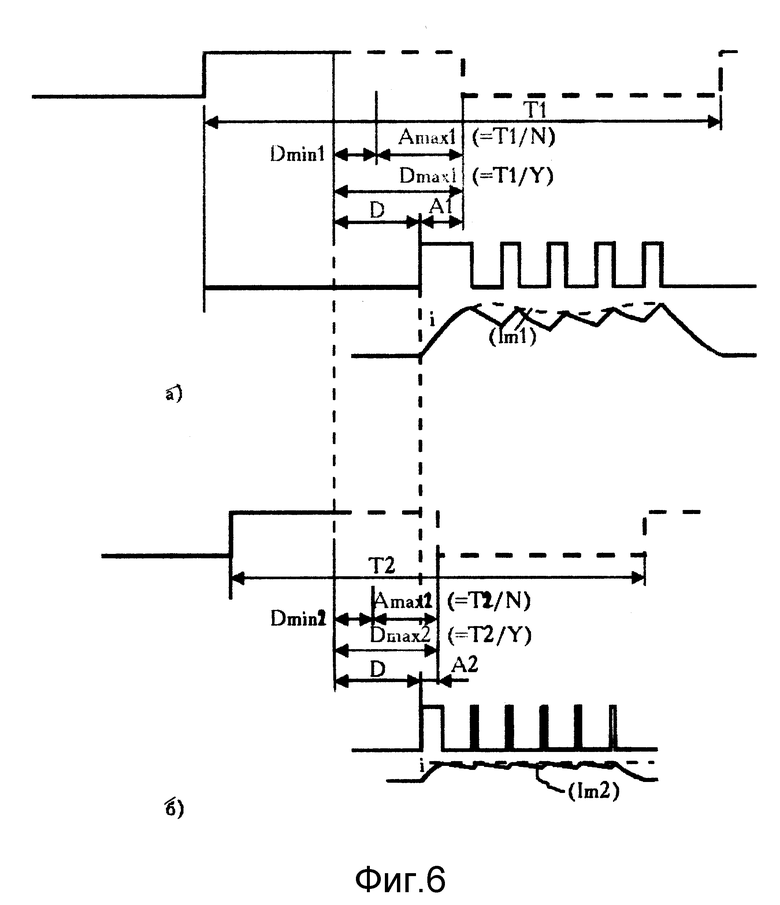
На фиг. 1 показаны временные диаграммы, поясняющие формулы (1), (3) (а - сигнал датчика положения ротора; б - сигнал управления ключами одной фазы силового преобразователя частоты (ПЧ), питающего двигатель; в - ток фазы двигателя); на фиг. 2 - временные диаграммы, поясняющие формулу (4) (а - сигнал датчика положения ротора; б - сигнал управления ключами одной фазы силового преобразователя частоты (ПЧ), питающего двигатель); на фиг. 3 - временные диаграммы, поясняющие формирование импульсов напряжения внутри зоны подачи напряжения (а - сигнал датчика положения ротора; б - сигнал управления ключами одной фазы силового преобразователя частоты (ПЧ), питающего двигатель, и ток фазы двигателя при равных импульсах напряжения после первого; в - то же, но при уменьшающихся по длительности импульсах напряжения; г - то же, при расширении первого импульса до длительности всей зоны подачи напряжения); на фиг. 4 - пример зависимости длительности первого импульса напряжения от опережения; на фиг. 5 - временные диаграммы, поясняющие процесс стабилизации частоты вращения (а - сигнал датчика положения ротора; б, в - сигнал управления ключами одной фазы силового преобразователя частоты (ПЧ), питающего двигатель, и ток фазы двигателя при разных значениях опережения); на фиг. 6 - временные диаграммы, поясняющие эффект самостабилизации в процессе стабилизации частоты вращения (а, б - сигналы ДПР, управления ключами одной фазы силового преобразователя частоты (ПЧ), питающего двигатель, и ток фазы двигателя при неизменном значении дополнения и разных мгновенных значениях частоты вращения).
Предлагаемый способ управления может быть реализован с помощью микропроцессорной системы управления. Управляющая программа составлена таким образом, что каждый фронт сигнала ДПР, соответствующий положению зубец - зубец статора и ротора двигателя, вызывает считывание содержимого счетчика - измерителя длительности периода ДПР, его обнуление и новый запуск. Временные диаграммы управления в текущем периоде ДПР формируются по результатам измерения прошлого периода, поэтому сигнал ДПР в текущем периоде показан на чертежах пунктиром. Вычисления проводятся в начале текущего периода, свободного от формирования управляющих импульсов.
По истечении интервала времени t1, вычисленного по формуле (1), формируется сигнал открытия всех ключей фазы ПЧ (в зависимости от схемы ПЧ - одного или двух), к фазе двигателя прикладывается напряжение источника питания и в ней начинает нарастать ток i (см. фиг. 1).
Интервал времени A означает опережение момента открытия ключей относительно момента времени T/2 (который соответствует, например, взаимному расположению зубец - паз статора и ротора двигателя). Примем для примера временной интервал A постоянным. Так как период ДПР с ростом частоты вращения уменьшается, то доля величины A в периоде растет. При этом опережение в угловом выражении оказывается прямо пропорциональным частоте вращения, что и требуется для управления двигателем индукторного типа. Такой режим может иметь место на низких частотах вращения, пока Amax = T/N больше A.
С ростом частоты вращения уменьшается период ДПР T и, следовательно, временной интервал Amax, который в угловом выражении (Amax [эл. гр.]) является постоянной величиной, выбирается из пределов 90 эл. гр. ≥ Amax [эл. гр. ] ≥ 36 эл. гр., которым соответствуют значения 4 ≤ N ≤ 10 (360/90 = 4, 360/36 = 10), и выражает максимально допустимое опережение.
Здесь эл. гр. - электрический градус - угловая величина, равная геометрическому градусу, деленному на количество зубцов ротора двигателя. В этом случае угловое расстояние между осями соседних зубцов ротора двигателя и, соответственно, угловое выражение периода ДПР равны 360 эл. гр., а выражение электрического градуса во времени равно T/360.
Когда при уменьшении периода ДПР (при разгоне двигателя) Amax становится меньше A, угловое значение опережения более нельзя увеличивать, так как это приведет к возрастанию отрицательной составляющей вращающего момента двигателя. С этого момента и при дальнейшем росте частоты вращения принимают A = Amax.
При изменении режимов работы двигателя величину A изменяют в пределах от 0 до Amax. Так, при изменении уставки тока двигателя Im в системах с формированием фазного тока по уставке тока рекомендуется изменять A пропорционально уставке, поставив в соответствие максимальной уставке тока значение Amax. В системах, где формирование фазного тока производится с помощью нормирования импульсов напряжения по предлагаемому способу, рекомендуется изменять A как параметр регулирования при стабилизации частоты вращения двигателя, как будет описано ниже.
По истечении времени t2, вычисленного по формуле (2), формируется сигнал закрытия всех ключей фазы ПЧ (в зависимости от схемы ПЧ - одного или двух), к фазной обмотке двигателя через обратные диоды ПЧ прикладывается напряжение источника питания обратной полярности и в ней начинает быстро спадать ток до нуля.
Время C означает укорочение угловой ширины зоны подачи напряжения относительно величины T/2 (180 эл. гр. - половины периода ДПР), имеющей место при очень низкой частоте вращения двигателя. При этом аналогично опережению укорочение в угловом выражении прямо пропорционально частоте вращения двигателя.
Как и опережение, укорочение должно быть ограничено, предлагается величина Cmax [эл. гр.] = 12 - 30 эл. град., чему соответствуют значения N1 от 12 до 30.
Величины A и C предлагается принимать пропорциональными друг другу, например, в соотношении C = A/3. Выбор коэффициента пропорциональности не должен противоречить предельным отношениям между собой Cmax и Amax.
В системах, требующих ограничения скорости вращения двигателя, величина T2 вычисляется с учетом формулы (4), которая для X = 2 принимает следующий вид:
t2 = 2T - T0 - A - C.
При этом при разгоне двигателя, когда частота его вращения достигнет значения, соответствующего периоду ДПР T0, начинается ускоренное схлопывание зоны подачи напряжения справа, как показано на фиг. 2. При этом падает вращающий момент двигателя, частота вращения перестает расти и стабилизируется. Чем больше коэффициент X, тем "жестче" схлопывание. Так, при X = 2 импульсы напряжения полностью исчезли бы при повышении частоты вращения двигателя в 1,5 раза (если пренебречь величинами A и C).
С момента времени t1 до момента времени t2 (внутри зоны подачи напряжения) ток фазы можно формировать или традиционным способом поддержания тока вблизи уставки с помощью датчиков и регулятора тока или, например, предлагаемым способом без применения датчиков токов, без регулятора токов, а также вспомогательных устройств, обслуживающих эти узлы. Формирование токов производят принудительно путем подачи на фазную обмотку двигателя импульсов напряжения нормированной длительности, в течение которых открывают все ключи данной фазы ПЧ, что приводит к нарастанию фазного тока. В течение пауз между импульсами закрывают как минимум один ключ данной фазы ПЧ, что приводит к спаданию фазного тока.
Длительность первого импульса напряжения I1 ставится в зависимость от опережения A и представляет собой время первоначального нарастания фазного тока. В общем случае эта зависимость должна быть нелинейной, так как ток в фазе нарастает не прямолинейно. На фиг. 4 показан пример такой зависимости. Здесь нелинейная кривая заменена на два отрезка прямой k1 и k2.
При A = T/N длительность I1 первого импульса напряжения становится равной ширине всей зоны подачи напряжения, равной T/2-C, и последующие импульсы уже не формируются (фиг. 3г и 4).
Длительности остальных импульсов напряжения I2, I3... выбирают одинаковыми, меньшими, например, в 4 раза длительности первого импульса напряжения I1 (фиг. 3б). Длительности пауз P между импульсами напряжения также выбирают равными между собой, достаточными для осуществления функции частотной защиты ПЧ. Реальная огибающая (Im) тока фазы i при таком способе управления отличается от прямой линии, но во многих случаях оказывается приемлемой.
Для снижения шума двигателя длительность последующих за вторым импульсов напряжения I3 ... уменьшают от импульса к импульсу до достижения определенной минимальной длительности Imin, как показано на фиг. 3в). При этом получается плавное спадание тока фазы к концу зоны подачи напряжения.
Вращающий момент двигателя тем больше, чем больше амплитуда фазного тока.
Длительность I1 первого импульса напряжения задает время нарастания тока, а следовательно, и значение, до которого ток нарастет, т.е. его амплитуду. Эта длительность однозначно связана с опережением A. Так как вращающий момент двигателя тем больше, чем больше амплитуда фазного тока, то возможно регулировать вращающий момент, изменяя A. Таким образом, данный способ управления позволяет просто реализовать функцию стабилизации частоты вращения двигателя путем регулирования опережения.
Следует отметить, что с помощью предлагаемого способа стабилизируется длительность периода ДПР, которая однозначно связана с частотой вращения двигателя, что позволяет говорить о стабилизации частоты вращения.
Опережение изменяют в пределах от 0 до Amax в зависимости от рассогласования заданной T* и текущей Tt длительностей периода сигнала датчика положения ротора двигателя. Если текущее значение периода ДПР превышает заданное, то один раз за период опережение увеличивают, и наоборот, до тех пор, пока эти значения не сравняются с точностью до заданной величины e - максимально допустимой погрешности, определяющей точность поддержания периода. Таким образом, при  регулятор опережения не работает, так как находится в зоне нечувствительности. На фиг. 4 показан процесс уменьшения тока фазы i от огибающей (Im1) до огибающей (Im2) при уменьшении опережения от A1 до A2 (фиг. 5б, в) под действием регулятора опережения при превышении частотой вращения заданной величины.
регулятор опережения не работает, так как находится в зоне нечувствительности. На фиг. 4 показан процесс уменьшения тока фазы i от огибающей (Im1) до огибающей (Im2) при уменьшении опережения от A1 до A2 (фиг. 5б, в) под действием регулятора опережения при превышении частотой вращения заданной величины.
Стабилизация частоты вращения с помощью такого регулятора становится эффективнее при применении самостабилизации. Для осуществления этого эффекта вводится параметр - "дополнение" D, который берется как параметр регулирования вместо опережения (см. фиг. 6). Если текущая длительность Tt периода ДПР превышает заданную T*, дополнение уменьшают, и наоборот, до тех пор, пока эти значения не сравняются с точностью до e. Дополнение изменяют в пределах от Dmin до Dmax, причем Dmax = T/Y, Dmin = Dmax - Amax. Здесь Y - постоянный коэффициент, причем Y ≤ N, например, Y = 4.
Затем величину A вычисляют по формуле: A = Dmax - D (5), и по результату вычисления формируют ток вышеуказанным способом.
Самостабилизация работает во всех режимах, но пояснить этот эффект проще, предположив, что регулятор находится в зоне нечувствительности и, следовательно, дополнение не меняется. Как видно из фиг. 6 а, б, при уменьшении длительности периода ДПР от T1 до T2, что соответствует увеличению частоты вращения, и неизменном значении дополнения D уменьшается величина Dmax от Dmax1 = T1/Y до Dmax2 = T2/Y, при этом, согласно (5), уменьшается опережение от A1 до A2, что приводит к уменьшению тока i в обмотке от огибающей (Im1) до огибающей (Im2) и, как следствие, к снижению частоты вращения.
В качестве текущего значения периода ДПР Tt при стабилизации частоты вращения берут измеренную длительность прошлого периода T, так как настоящий период, в котором формируется ток, еще не закончен. Для уменьшения эффекта перерегулирования при стабилизации частоты вращения двигателя предлагается в качестве этого значения брать эквивалентное значение периода ДПР, вычисляемое по результатам измерения нескольких последних периодов и, следовательно, содержащее меру ускорения двигателя. Предлагается, например, формула: Tt = 2•T - T0ld, где T и T0ld - длительности последнего и предпоследнего периодов ДПР соответственно.
Значение опережения A, полученное в таком регуляторе, согласно (1), определяет момент начала подачи импульсов напряжения в фазную обмотку индукторного двигателя. Оно же однозначно определяет длительность всех импульсов напряжения внутри зоны подачи напряжения согласно вышеизложенному способу, а также определяет момент окончания зоны, согласно (3). Таким образом, предлагаемый способ позволяет заменить регулятор угла, регулятор тока и контур регулирования с ОС по скорости одним простым регулятором опережения или дополнения.
Технический эффект изобретения состоит в возможности построения на основе предложенного способа управления систем управления индукторными двигателями, обладающими простотой реализации, высокой гибкостью и возможностью простого осуществления стабилизации частоты вращения двигателя. Такой эффект достигается за счет применения простых формул, которые позволяют вычислять основные параметры управления индукторным двигателем внутри каждого периода ДПР, избавляют от необходимости составления и программирования таблиц, а также за счет отказа от датчиков фазных токов и, соответственно, всех устройств, связанных с ними, и применения простого алгоритма формирования фазных токов путем нормирования импульсов напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ИНДУКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2212755C2 |
| СЕРВОПРИВОД С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2162041C2 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| РЕГУЛЯТОР УГЛА ПОДАЧИ ИМПУЛЬСОВ ТОКА В ФАЗНЫЕ ОБМОТКИ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2088040C1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНДУКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ СО СТАРТОВЫМИ ПОЛЮСАМИ (ВАРИАНТЫ) | 1994 |
|
RU2091977C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| МОСТОВОЙ ИНВЕРТОР И СХЕМА ЕГО УПРАВЛЕНИЯ | 2001 |
|
RU2208896C2 |



Изобретение относится к способам управления индукторными двигателями, имеющими зубчатый статор. Способ управления индукторным двигателем, заключающийся в том, что токи в фазных обмотках двигателя формируют путем подачи на обмотку импульсов напряжения в течение каждого периода датчика положения ротора двигателя (ДПР), для чего измеряют период между двумя соседними фронтами сигнала ДПР, а временные интервалы t1 от момента появления фронта сигнала ДПР до начала коридора и t2 от момента появления фронта сигнала ДПР до окончания текущего периода ДПР вычисляют в ходе цикла управления по формулам: t1 = T / 2 - A; t2 = T - A - C; где T - длительность прошлого периода ДПР, A - опережение, C - укорочение, которые представляют собой интервалы времени, причем A ≤ Amax = T / N C ≤ T / N1, где N и N1 - постоянные коэффициенты. Импульсы напряжения формируют без применения датчиков тока и связанных с ними узлов. С помощью регулирования опережения осуществляют стабилизацию частоты вращения двигателя, в том числе стабилизацию с применением эффекта самостабилизации и без перерегулирования. 8 з.п. ф-лы, 6 ил.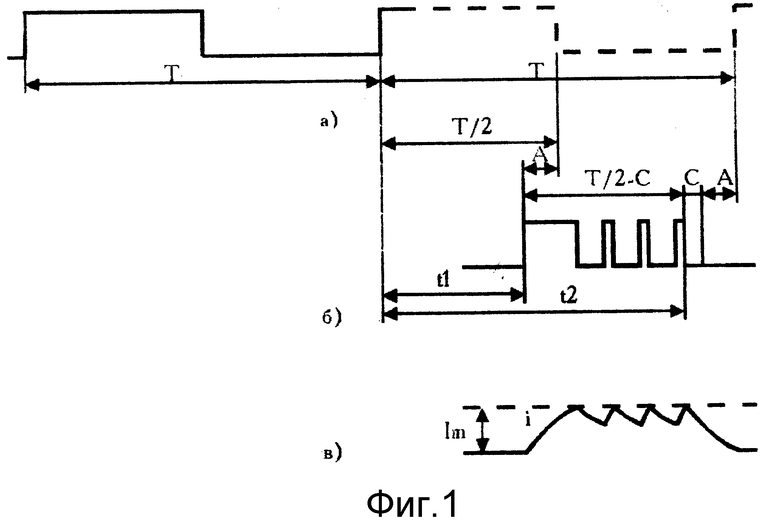
t1 = T/2 - A,
где A - интервал времени, представляющий собой опережение момента подачи первого импульса напряжения относительно момента времени T/2, причем A выбирается таким, что
0 ≤ A ≤ Amax,
где Amax = T/N,
где N - постоянный коэффициент, выбираемый в пределах 4 ≤ N ≤ 10,
а интервал t2 определяют в соответствии с формулой
t2 = T - A - C,
где C - интервал времени, представляющий собой укорочение зоны подачи напряжения относительно интервала времени T/2, причем C выбирают таким, что
0 ≤ C ≤ Cmax,
где Cmax = T/N1,
где N1 - постоянный коэффициент, выбираемый в пределах 12 ≤ N1 ≤ 30,
а при T < T0 - в соответствии с формулой
t2 = XT - (X - 1)T0 - A - C,
где T0 - значение периода датчика положения ротора, при котором должно начаться ограничение частоты вращения двигателя;
X - постоянный положительный коэффициент, выбираемый тем большим, чем более жесткое ограничение частоты вращения требуется получить. - не изменяют, где e - максимально допустимая погрешность величины текущего периода датчика положения ротора.
- не изменяют, где e - максимально допустимая погрешность величины текущего периода датчика положения ротора. - не изменяют, а затем величину A вычисляют по формуле
- не изменяют, а затем величину A вычисляют по формуле
A = Dmax - D,
где e - максимально допустимая погрешность величины текущего периода датчика положения ротора,
Dmax = T/Y, Dmin = Dmax - Amax,
где Y - постоянный положительный коэффициент, причем Y ≤ N.
| US 4707650 A1, 17.11.87 | |||
| US 4616165 A1, 07.10.86. |

