Изобретение относится к системе подвески для транспортных средств и особенно к управлению движением колес относительно рамы транспортного средства при пересечении неровных поверхностей во время их вращения на ходу.
В известных системах подвески средства упругости, как то пружины и торсионы, предназначены для выполнения множества функций от поглощения ударной нагрузки (как от ударов на ходу) до обеспечения гибкой опоре дать возможность колесам поддерживать контакт с неровной поверхностью при ее пересечении. Дополнительная нагрузка, как например отклонения груза, вызывает в традиционных подвесках движение между остовом и колесами тем же образом, что и динамическая или контурная нагрузка.
Традиционные упругие пружинные подвески находятся в каждом колесном комплекте, будучи обеспеченными индивидуальными упругими компонентами, которые механически поддерживают соответствующие "углы" транспортного средства. Упругие компоненты имеют быстро прогрессирующую номинальную нагрузку при отклонении, и нормальный вес транспортного средства только распределяется по всем колесам, когда колеса совместно описывают плоскую поверхность. Когда одно колесо транспортного средства переезжает (или припарковано на) бугор, это колесо несет больший вес, чем обычно несомый на ровной поверхности. Тем временем соседние колеса соответственно избавляются от части положенного им веса.
Системы пружинной подвески с быстро прогрессирующей упругостью работают удовлетворительно только в узком спектре динамических и статических ситуаций и в состоянии дополнительной нагрузки, и любой вид перегрузки или неполной нагрузки транспортного средства обычно неблагоприятно влияет на его способности поддерживать тягу, средний клиренс и качество езды. Кроме того, объем требований на известной системе упругой подвески приводит к собственным противоречивым характеристикам эксплуатационных качеств, когда в системе нет внутренней способности к обнаружению и реагированию по-разному в разных ситуациях, что вызывает резонансную отдачу, потребность в чрезмерной амортизации ударным амортизатором, а также противодействующих крену стержней, что ограничивает таким образом свободное движение неупругих компонентов.
Недавно появилась тенденция к включению в системы упругой пружинной подвески различных амортизаторов и пружин с целью устранения некоторых из вышеназванных недостатков. Некоторые более развитые системы подвески (активная и полуактивная подвески) включают некоторое количество электронных датчиков, которые выдают информацию, как то: вертикальное движение колеса и наклон остова, так же как и скорость, разгон, команды управления и торможения. Эти и другие данные обрабатываются компьютером, который выдает команды гидравлическому и пневматическому приводам не принимать во внимание обычные функции упругих пружин с целью перевода, компенсации и настройки характеристик подвески на подходящую скорость, поверхность и другие факторы для поддерживания уровня езды, а также распределения веса по колесам. Поэтому эти системы подвески нуждаются во внешних резервных системах наведения, а также требуют значительного выхода внешней энергии, идущей из двигателя транспортного средства, для работы приводов, которые влияют на регулировку системы подвески.
В конструкции "активной" и "полуактивной" подвески для транспортных средств было предложено включить системы, работающие на основании компрессии и/или вытеснения жидкости, и такие системы обычно включают насос для поддерживания рабочей жидкости под требуемым давлением и выполнения его высокоскоростного распределения и сложные механизмы управления для регулирования работой системы подвески в соответствии с воспринятыми дорожными рабочими условиями и/или состоянием транспортного средства. Эти известные системы, включающие насосы и электронные управляющие системы, относительно дороги для конструирования и эксплуатации и требуют выхода энергии, и поэтому имеют ограниченную приемлемость в автомобилестроении.
Как было предложено, системы амортизации используются вместе с пружинной подвеской обычного типа, где устройства жидкостной амортизации связаны с отдельными колесами и взаимосвязаны для обеспечения дополнительной амортизации при поперечном наклоне или продольном колебании вокруг поперечной оси. Несмотря на то что эти конструкции могут способствовать улучшению эксплуатационного режима амортизации желаемых характеристик базовой пружинной подвески, все же появляется быстро прогрессирующее изменение в силе пружины, ведущее к нежелательным изменениям в распределении веса, и ограничение в движении колеса.
Поэтому задача данного изобретения обеспечение системы подвески, которая исключает использование пружинных компонентов обычного типа и включает полную жидкостную подвеску без необходимости управления выходом внешней энергии во время работы и которая обеспечивает неограниченное осевое сочленение при минимизации вращения и углового колебания, имеет относительно простую конструкцию и эффективна в работе.
Имея в виду эту задачу, данное изобретение представляет транспортное средство, имеющее несущую раму, пару передних имеющих сцепление с землей колес и пару задних имеющих сцепление с землей колес, одинаково соединенных с рамой, каждое колесо может двигаться относительно рамы в основном по вертикали, гидравлические цилиндры двустороннего действия, также соединяющие каждое колесо с рамой, причем каждый цилиндр состоит из первой и второй заполненных жидкостью камер по разные стороны от поршня, указанные первая и вторая камеры изменяются в объеме в ответ на вертикальное движение между соответствующим колесом и рамой, соответствующая первая соединительная гидравлическая труба соединяет указанные первые камеры переднего и заднего колес по одну сторону транспортного средства, соответствующая вторая соединительная гидравлическая труба соединяет вторые камеры переднего и заднего колес по одну сторону от транспортного средства, и, далее, соединительная гидравлическая труба, соединяющая первые гидравлические трубы каждой стороны транспортного средства с соответствующими вторыми гидравлическими трубами противоположных сторон транспортного средства, для последующего обеспечения двух гидравлических контуров, включающих каждый соответствующие первые и вторые трубы по разные стороны, и, далее, трубы, соединяющие первую с одной стороны со второй с другой стороны, каждый указанный контур имеет упругость для распределения по контуру жидкости, передвигающейся от цилиндров результирующим увеличением давления, и каждое из двух передних или двух задних колес транспортного средства соединяются с рамой соответствующими дополнительными гидравлическими цилиндрами, определяющими третьи камеры, указанные третьи гидравлические камеры двух передних и двух задних цилиндров соединяются третьей трубой для обеспечения третьего гидравлического контура, указанные первый, второй, третий гидравлические контуры независимы в работе от внешней жидкости и источников давления и обеспечивают полную одинаковую нагрузку на колеса вне зависимости от вертикального положения колеса во время минимизации движения в горизонтальном направлении.
Взаимодействие цилиндров с противоположных сторон транспортного средства по двум независимым гидравлическим контурам обеспечивает контроль над поперечным движением рамы транспортного средства, обычно появляющимся, когда транспортное средство поворачивается, и особенно на ходу. Как хорошо понятно, когда транспортное средство, как описываемое ниже (фиг. 1), поворачивает направо, центробежные силы вызывают уменьшение давления на грунт с левой стороны транспортного средства и увеличение давления в первых камерах и, следовательно, в первой трубе левой стороны транспортного средства, а когда поднимается правая сторона транспортного средства, давление в первых камерах правой стороны падает. Если левая первая труба соединена с правой второй трубой, жидкость переместится из левых первых камер через первую трубу и вторую правую трубу во вторые камеры справа для выравнивания там давления и для поддержания в основном уровня высоты транспортного средства. В предпочтительном варианте транспортное средство имеет вторые цилиндры двустороннего действия, соединяющие каждое колесо и раму транспортного средства с третьей и четвертой трубами, соединяющими вторые цилиндры двустороннего действия на противоположных концах транспортного средства, а также спереди и сзади рамы соответственно. Также третья и четвертая трубы спереди соединяются крест-накрест с третьей и четвертой трубами сзади тем же способом. Как описано выше в связи с первым и вторым контурами на каждой стороне рамы. Передняя третья труба соединена с задней четвертой трубой, когда четвертая передняя труба соединена с задней третьей трубой. Вторые цилиндры двустороннего действия взаимодействуют таким способом для управления продольным угловым колебанием транспортного средства, обычно проявляющимся во время торможения или разгона.
Перенос жидкостной среды для уравновешивания давления и объема выполняет непосредственное выравнивание и стабилизацию транспортного средства втягиванием и вытягиванием соответствующих цилиндров, которые обеспечивают изменение механизма регулировки опоры рамы транспортного средства с опорой на не имеющие пружин углы колес.
С целью распределения перемещения жидкости от цилиндров, имеющихся в каждой схеме, причем в каждой цепи предпочтительно установлен хотя бы один аккумулятор давления. Более точно предпочтителен хотя бы один аккумулятор давления в каждой первой и третьей трубе, соединяющей соответствующие первые камеры каждой стороны транспортного средства и третьи поперечные камеры. Аккумуляторы обеспечивают упругость в системе подвески так же, как пружины в подвесках обычного типа. В варианте выполнения подвески, где жидкость сжимаема, аккумуляторы не требуют от среды работать как аккумулятор.
Когда транспортное средство едет по нормальному шоссе, движение колес относительно рамы невелико и обычно имеет высокую частоту и распределяется перемещением жидкости в аккумуляторы подходящего контура с малым, если вообще имеющим место, перемещением жидкости между цилиндрами, но с увеличением давления в этом контуре.
Однако, когда транспортное средство едет не по нормальной трассе и/или когда колебания или вращение, вызванное условиями езды, большие и относительно низкочастотные, происходят движения колеса, и они первоначально распределяются некоторой жидкостью, идущей на аккумулятор с результирующим увеличением давления в контуре, и частично идущей на другие цилиндры контура, для того чтобы вызвать выравнивающее движение других колес транспортного средства. Взаимодействие давлений и объемов в контурах непрерывно производит новые стабильные условия по отношению к вертикальной позиции колеса относительно рамы с ровным, в основном, распределением веса по всем колесам. Рама в основном принимает горизонтальное или параллельное общему наклону поверхности положение.
В отличие от других систем минимизация вращения и колебания и восстановление уровня достигается в предлагаемой конструкции без ухудшения комфорта при езде и без выхода энергии в систему подвески, закачиваемой насосу компрессором или любым другим способом от мотора или внешнего источника энергии, и без необходимого требования датчика давления и других рабочих устройств наблюдения, подающих информацию на электрический управляющий блок (ЭУБ), который может управлять электрическими соленоидными клапанами, насосами, компрессорами или управляемым расширением жидкости под давлением с аккумулятора.
Подвеска транспортного средства, описанная выше, отличается от хорошо известных систем, в которых движение колеса не управляется полностью прогрессирующими механизмами упругой подвески и все колеса могут пересекать крайне неровную поверхность без значительного изменения к нормальному распределению веса по всем колесам во время поддержки ровного уровня в отношении вращения и колебания без ограничения допустимого размаха движения колес.
Транспортное средство, установленное на колеса вышеописанным способом, разрешает свободное движение по вертикали отдельных колес по отношению к раме транспортного средства без имевшегося ранее подавления сопротивления пружинных механизмов обычного типа, обычно соединенных между колесами и рамой транспортного средства. Таким образом, колеса могут свободно двигаться для пересечения неровной поверхности, причем без постоянно меняющегося распределения веса транспортного средства по отдельным колесам. Это полное устранение изменения в распределении веса значительно увеличивает тягу колес при поперечном движении и эксплуатационные данные транспортного средства.
Несколько идентичных применений данного изобретения будут теперь описаны на примерах с обращением к соответствующим чертежам.
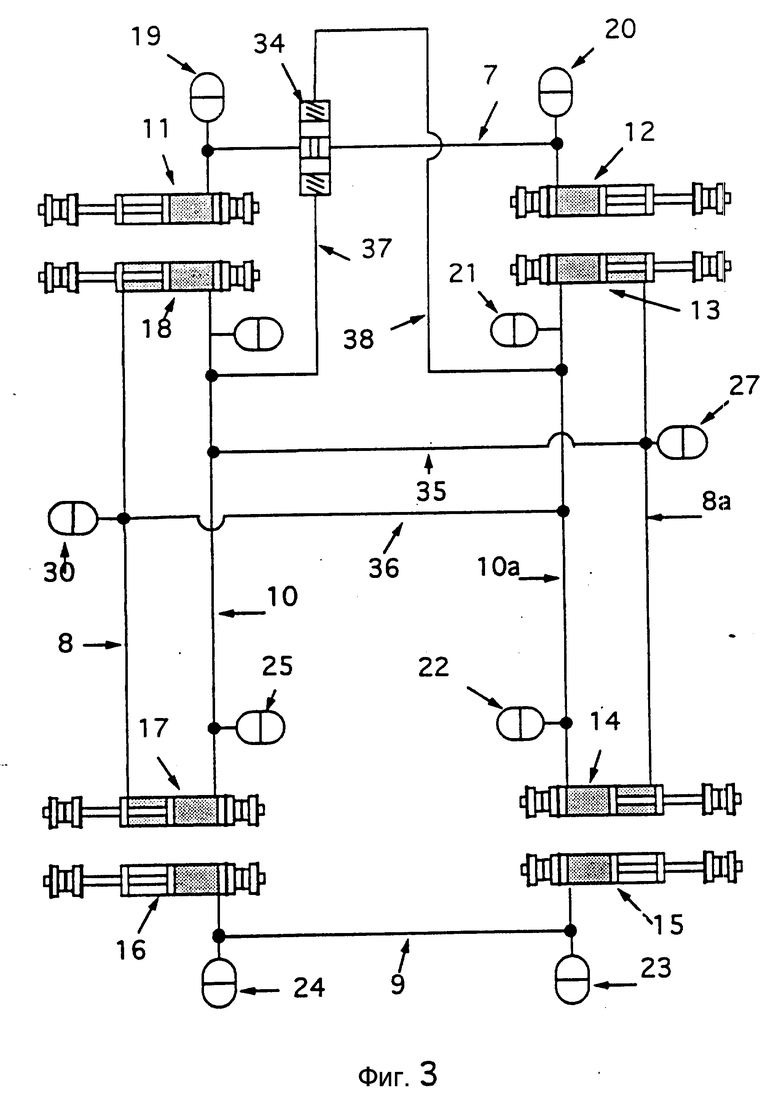
На фиг. 1 дано схематическое изображение рамы и колес транспортного средства, собранных с предлагаемой системой подвески; на фиг. 2 - гидравлическая принципиальная схема системы подвески, показанной на фиг. 1; на фиг. 3 гидравлическая принципиальная схема первой модификации подвески; на фиг. 4 гидравлическая принципиальная схема второй модификации системы подвески.
На фиг. 1 рама 5 транспортного средства поддерживается четырьмя колесами 1 4 через соответственно связи 6 типа параллельных дужек, конструкция которых хорошо известна. Другие виды связи для соединения колес транспортного средства с рамой могут быть использованы по желанию. Тем не менее следует отметить, что вставлять между шасси и соответствующими колесами пружины, торсионы или другие элементы упругой подвески нет необходимости.
Цилиндры двустороннего действия располагаются между рамой и связью 6, соединяя каждое колесо с рамой. Передний и задний цилиндры на левой стороне на фиг. 1 обозначены 18 и 17, на правой стороне соответственно 14 и 13. Каждый из цилиндров имеет корпус, связанный с рамой 5, и поршень внутри, разделяющий цилиндр на 2 камеры, обозначенные как 17a и 17b в цилиндре 17 и 18a и 18b в цилиндре 18. Другие два цилиндра 13 и 14 имеют такое же строение и обозначены так же. Поршень каждого цилиндра соединен с соответствующим колесом через связь 6 таким образом, что поршень может двигаться вперед и назад в цилиндре, если колесо двигается обычно по вертикали относительно рамы 5.
На фиг. 1 и 2 цилиндры 17 и 18 левой стороны транспортного средства имеют 2 верхних камеры 17a и 18a, соединенные трубой 10, и две нижних камеры 17b и 18b, соединенных трубой 8. Аналогично верхние камеры цилиндров 13 и 14 правой стороны соединены трубой 10a и нижние камеры трубой 8a. В своей середине (по длине) труба 10 соединяется с трубой 8a, трубой 35 и трубы 10a и 8 трубой 36 для обеспечения соответствующих контуров.
Кроме того, имеется цилиндр одностороннего действия, связанный с каждым колесом и соединенный между рамой 5 и связью 6, поддерживающей колесо тем же способом, который описан выше для цилиндров двустороннего действия. Цилиндры одностороннего действия спереди рамы обозначены 11 и 12 и сзади 15 и 16. Камеры передних цилиндров 11 и 12 одностороннего действия связаны друг с другом трубой 7, и камеры цилиндров 15 и 16 связаны трубой 9.
Понятно, что необязательно устанавливать дополнительные цилиндры одностороннего действия и спереди и сзади рамы, и если только один конец подходит для этого, то предпочтительно устанавливать их на том конце рамы, который обычно тяжелее.
Каждый из контуров 10 и 10a, соединяющих верхние камеры четырех цилиндров двустороннего действия, имеет по два соединенных аккумулятора 25, 26 и 21, 22, причем контуры персонально восприимчивы к обеспечению упругости в подвеске, как это делают пружины в существующих пружинных подвесках.
Если жидкостью, используемой в цилиндрах и соединительных трубах, является сжиженный газ, аккумуляторы не требуются, так как газ обеспечивает требуемый уровень сжимаемости или упругости.
В контурах могут иметься дополнительные необязательные аккумуляторы, как 27, 28 и 29, 30 на трубах соответственно 8 и 8a (как показано на фиг. 1). Эти аккумуляторы, если они имеются, предпочтительно меньше и соизмеримы по размеру и функциям с нижними камерами цилиндров, позволяют жидкости в нижних камерах быть быстро удаленной и обеспечивают сопротивление ударной нагрузке, при которой ось может прогнуться вниз и разрушить поршни и их корпуса. Аккумуляторы также обеспечивают быстрые реакции и отклики в движении цилиндров, так как потери трения минимизированы в трубах.
Далее аккумуляторы 19, 20 соединены с передним контуром 7 и 23, 24 с задним контуром 9.
Все аккумуляторы расположены настолько возможно близко к своим цилиндрам для обеспечения немедленного и точного ответа на быстрые динамические усилия, появляющиеся при быстром передвижении транспортного средства.
Когда вышеописанная подвеска приспосабливается к обычно медленно двигающимся транспортным средствам, таким как краны, принято включать только по одному аккумулятору в каждый контур, и в опорных контурах перегрузки аккумуляторы могут быть исключены или быть в наличии с изолирующими средствами, как соленоидный клапан, для уменьшения упругости этих специальных контуров под нагрузкой. Кроме того, наоборот, может быть много аккумуляторов в любом контуре, и каждый аккумулятор может быть перезаряжен на различное давление для обеспечения прогрессирующего множества коэффициентов упругости для приспособления к ситуациям с различной нагрузкой.
Аккумуляторы могут быть предусмотрены с ослабляющими затворами на их выходах для выполнения сходных функций с амортизаторами в других системах подвески транспортных средств.
Устройства управления потоком, как 31 и 33, могут быть в любом контуре для уменьшения скорости и управления прохождением потока жидкости для гарантии того, что цилиндры на каждом конце труб прямо соединены только на маленькой скорости, что появляется при пересечении транспортным средством неровной поверхности, когда требуется большое перемещение колеса (или осевого шарнира) и оптимально малое давление на почву по всем колесам. На высокой скорости небольшие динамические движения и вибрация колеса наилучшим образом демпфируются прежде всего аккумуляторами.
Любая из труб может быть снабжена устройствами управления потоком или другими устройствами для изменения и даже остановки потока в трубах между соответствующими цилиндрами. Примером такого клапана может быть соленоидный клапан, который активизируется ЗУБом, обрабатывающим различную информацию, полученную с таких источников, как акселерометры или датчики давления, и вызывает резкое или постепенное закрывание клапанов.
В предпочтительной конструкции в контуре 7 имеется золотник, обозначенный 34 на фиг. 3. Видно, что клапан 34 расположен в центре корпуса так, что позволяет жидкости свободно и беспрепятственно проходить через него, когда давление на каждом конце клапана одинаковое. Тем не менее, увеличение перепада давления заставляет клапан переместиться, и он может блокировать прохождение жидкости по трубе 7. В особенном клапане, как показано, противоположные торцевые поверхности золотника соединены трубами 37 и 38 соответственно с контурами 10 и 10a так, что разность давления между контурами 10 и 10а, появляющаяся из-за эксцентриситета нагрузки или поворота транспортного средства, может закрыть золотник 34, предотвращая поток жидкости между цилиндрами 11 и 12, который может иметь место при допущении чрезмерного вращательного движения рамы. Золотник может быть собран или установлен таким образом, что потребуется заданная разность давлений, чтобы вызвать закрытие золотника 34.
Действие систем подвески, показанных на фиг. 1 и 2, теперь будут описаны подробно. В последующем описании будет понятно, что необходимо включить аккумуляторы в контуры, тогда жидкость, вытесненная из цилиндра, приводит к изменению колесной нагрузки, что может быть снято аккумулятором, в результате увеличится давление, причем вытесненная жидкость по частям передается на другие цилиндры подобной схемы.
Когда транспортное средство поворачивает направо, как показано на фиг. 1, центробежные силы вызывают смещение в распределении веса влево, а следовательно, перенос большей части веса на левые колеса 1 и 4 через цилиндры 11, 18, 17 и 16 левой стороны, которые к тому же сжимают камеры 11a, 18a, 17a и 16a, что уменьшает общую длину цилиндров, тогда как цилиндры 13, 14, 12 и 15 на правой стороне транспортного средства освобождены от соответствующего веса транспортного средства и поэтому удлиняются.
Подсчитано, что при повороте на ровной поверхности без использования торможения или разгона одинаковые центробежные силы прилагаются и на передние и на задние левые цилиндры по одну сторону от транспортного средства и действуют эти силы одинаково и противоположно друг на друга.
Суммарное увеличение давления двух верхних камер 17a и 18a в контуре 10 (левая сторона) стремится уменьшить себя передачей жидкости к находящейся под меньшим давлением правой стороне транспортного средства через трубу 36 и отсюда на две нижних камеры 13b и 14b цилиндров 13 и 14. Это отражается в попытке камер 13b и 14b увеличиваться в объеме, и следовательно, в уменьшении общей длины цилиндров 13 и 14, уменьшая, таким образом, полный вес рамы на менее загруженной стороне (правой стороне).
Необходимо отметить, что цилиндры имеют обычную конструкцию гидравлических (пневматических) цилиндров двустороннего действия, в которых поршни имеют различную площадь верхней и нижней поверхности из-за стержня, уменьшающего площадь переднего торца нижней камеры. Это может выразиться в большем давлении, появляющемся на большой лицевой поверхности поршня, опирающемся на транспортное средство. Соответствующие площади поверхностей поршня в цилиндре определяют величину вращения (или колебания), которое допускается для поддержания "чувства" безопасности или обратной связи с водителем.
Функции зеркальных компонентов и камер с другой стороны транспортного средства проявляются в поддержании и содействии управляемому уменьшению вращения, как это следует из дальнейшего.
Во время поворота направо камеры 13a и 14a не нуждаются в расширении, а поршни оттягиваются вниз, что выражается в комбинированном уменьшении давления, которое передается трубами 36 и 8 с камерами 18b и 17b, которые в результате пытаются уменьшиться в размере, и значит содействуют управлению вращательным движением, эффективно помогая в увеличении камер 18a и 17a, чем обеспечивается дополнительная опора на левой стороне системы и транспортного средства.
Также необходимо заметить, что хотя вышеописанное действие по управлению вращением ограничивает комбинированные позиции колес соответственно 1, 4 и 2, 3, не предотвращается любое обоюдное взаимное движение соседних колес при повороте на неровной поверхности.
Приведенное выше описание поперечных соединений между левыми и правыми контурами распространяется также и на соединенные контуры между передними и задними колесами для управления колебательными движениями тем же способом. Контур для достижения этого, изображенный на фиг. 4, является развитием контура, показанного на фиг. 2.
На фиг. 4 соответствующие элементы, работающие как описано выше на фиг. 1 и 2, обозначены тем же образом и могут не описываться далее на фиг. 4.
В варианте выполнения, изображенном на фиг. 4, цилиндры 11, 12, 15 и 16 одностороннего действия заменены цилиндрами 41, 42, 43 и 44 двустороннего действия, имеющими каждый по верхней и нижней камере. Верхние камеры обозначены 41a, 42a, 43a, 44a и нижние камеры 41b, 42b, 43b и 44b. Цилиндры 41 и 42 спереди транспортного средства имеют соединенные трубой 46 верхние камеры 41a и 42a и соединенные трубой 45 нижние камеры 41b и 42b. Аналогично, цилиндры 43 и 44 сзади транспортного средства имеют соединенные трубой 46a верхние камеры 43a и 44a и соединенные трубой 45a нижние камеры 43b и 44b.
Каждая из труб 46 и 46a имеет два соединительных аккумулятора 50, 51 и 52, 53, каждый аккумулятор, располагаясь вблизи соответствующего цилиндра, соединен соответствующими трубами. Каждая из труб 45 и 45a имеет одиночный аккумулятор 54 и 55. Такое распределение аккумуляторов аналогично вышеописанному по фиг. 1 и 2 и используется с теми же целями, которые объяснены выше, за исключением колебаний.
Необходимо заметить, что описанный выше на фиг. 3 золотник 34 не нужен в более полной системе подвески, изображенной на фиг. 4. Трубы 45 и 46a соединены трубой 57 для обеспечения контура, и труба 45a и 46 соединены трубой 56 для обеспечения контура.
Нижние камеры цилиндров 41, 42, 43 и 44 двустороннего действия и их объединенные контуры, включающие соединительные трубы, контролируют продольные колебательные движения транспортного средства по длине, обычно появляющиеся от торможения или разгона транспортного средства. Когда транспортное средство может, например, быть остановлено и повернуто одновременно, и продольный и поперечный контур работают одновременно для управления и вращательным и колебательным движениями.
Также одновременно может иметь место осевое сочленение как результат неровной поверхности, что отражается во взаимных движениях цилиндров на соседних колесах, и различные функции контуров не влияют друг на друга, т.е. не ограничивают функций других контуров.
Когда контуры обычно работают под самыми различными давлениями, может быть необходимо ввести один или несколько каскадных устройств для изменения взаимоотношения давления и объема, которые эффективно выравнивают смещение или нежелательное падение давления, обычно это пригодно для определения величины всех цилиндров для работы под одним давлением для облегчения первоначального заряда и обслуживания системы.
Хотя аккумуляторы, описанные по различным вариантам выполнения изобретения, обычно включают амортизационные клапаны, пневматический вариант изобретения использует газовую среду в объеме камер и соединительные трубы, являющиеся упругими средствами, так что амортизаторы, обычно включенные в аккумуляторы, могут не потребоваться. Необходимо поэтому иметь раздельные амортизирующие приборы в параллель с цилиндрами. Это может быть простой телескопический амортизатор, включенный в цилиндры множеством способов.
Хотя аккумуляторы показаны и описаны как гидро-пневматические камеры, отметим, что цилиндры с поршнями, двигающими внешние витки пружины, или другие подобные системы также могут быть использованы.
Кроме того, хорошо и выгодно включать насос, компрессор аккумулятор или другой силовой источник для произвольного и периодического подъема, выравнивания и изменения расположения в транспортном средстве, что может быть потребовано или может стать необходимым как результат утечки жидкости. Некоторые водители могут также потребовать, чтобы их транспортные средства имели возможность для подъема на различные изменяющиеся высоты. Эти изменения не изображены и не описаны, так как системы с такими целями известны и могут быть легко приспособлены или включены в систему подвески, здесь описанную.
Также необходимо отметить, что множество осевых транспортных средств могут использовать варианты этого изобретения и они тоже включаются в круг изобретения. Кроме того, смежные системы подвески, которые могут включать только два контура или более четырех контуров, могут подходить для использования метода, описанного выше, и эти варианты также включены в круг изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАНИЯ СИСТЕМЫ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2145284C1 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2302969C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2408475C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 1992 |
|
RU2032569C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДЛЯ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2341383C2 |
| ПЛАВАЮЩАЯ СИСТЕМА ЖАТКИ ДЛЯ ИСПОЛЬЗОВАНИЯ С СЕЛЬСКОХОЗЯЙСТВЕННЫМ ВИНДРОУЭРОМ ИЛИ КОМБАЙНОМ | 2009 |
|
RU2504946C2 |
| Гидравлическая тормозная система транспортного средства | 1970 |
|
SU547172A3 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ГИДРАВЛИЧЕСКАЯ ИЛИ ПНЕВМАТИЧЕСКАЯ ПРИВОДНАЯ СИСТЕМА, ДВИГАТЕЛЬ И НАСОС ДЛЯ НЕЕ | 2014 |
|
RU2660097C9 |
| Рабочий тормозной цилиндр транспортного средства | 1973 |
|
SU712019A3 |


Использование: изобретение относится к системе подвески для транспортных средств и особенно к управлению движением колес относительно рамы транспортного средства при пересечении неровных поверхностей во время их вращения на ходу. Сущность: предлагаемая система подвески для транспортных средств разрешает свободное движение по вертикали отдельных колес по отношению к раме транспортного средства. Колеса могут свободно двигаться для пересечения неровностей поверхности, причем без постоянно меняющегося распределения веса транспортного средства по отдельным колесам, что значительно увеличивает тягу колес при поперечном движении и эксплуатационные данные транспортного средства. 2 с. и 9 з.п. ф-лы, 4 ил.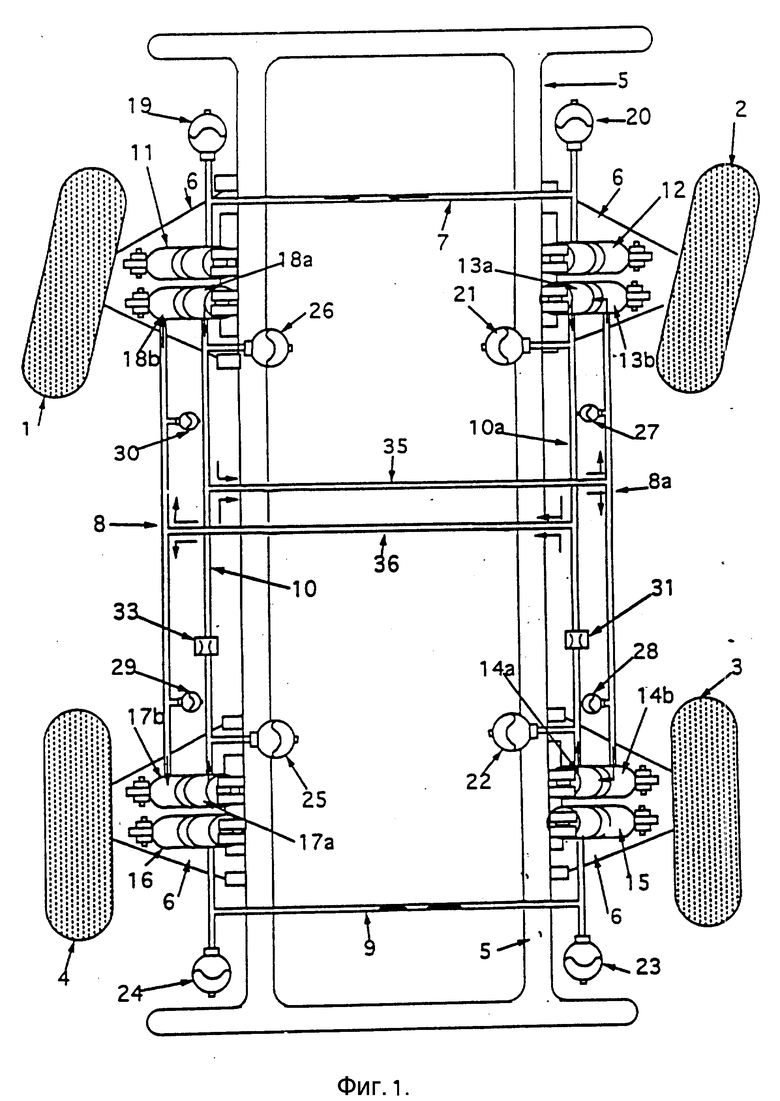
| US, патент, 4606551, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
