Изобретение относится к технике, использующей различные виды устройств, преобразующих магнитную энергию постоянных магнитов в разнообразные виды энергии (механическую, электрическую, тепловую, световую и другие).
Известны способы управления магнитным потоком при преобразовании магнитной энергии постоянного магнита в механическую энергию, заключающиеся в прямом регулировании рабочего магнитного потока с помощью дополнительного источника магнитодвижущей силы (МДС) в виде электромагнита, имеющего общий магнитопровод с постоянным магнитом и управляемого регулирующим устройством.
Наиболее близким по технической сущности к данному является известный способ управления магнитным потоком, создаваемым постоянным магнитом, заключающийся в том, что разноименные полюса постоянного магнита замыкаются между собой накоротко посредством магнитного шунта.
Шунтирующим элементом обычно служат стальные полюса адаптера, которые во включенном состоянии расположены строго напротив полюсов постоянного магнита, а в отключенном замыкают (шунтируют) его разноименные полюса. Известное устройство для реализации этого способа содержит постоянный магнит, разноименные полюса которого замкнуты накоротко магнитным шунтом, и задатчик величины управляющего воздействия, предназначенного для компенсационного управления.
Известным способам с прямым регулированием рабочего магнитного потока с помощью дополнительного источника магнитодвижущей силы в виде электромагнита присущ следующий недостаток: большие энергетические затраты, связанные с преобразованием магнитной энергии, накопленной в постоянном магните, являющимся аккумулятором магнитной энергии, в другие виды энергии, например, в механическую.
При прямом способе регулирования осуществляют воздействие на поле постоянного магнита посредством стороннего магнитного поля, имеющего, как правило, продольный характер, например, по плотности магнитного потока, постоянный магнит по мере увеличения магнитного поля начинает размагничиваться.
По достижении напряженности управляющего магнитного потока значения, равного коэрцитивной силе постоянного магнита, рабочий магнитный поток становится равным нулю.
В случае использования в качестве аккумуляторов магнитной энергии высокоэнергетических постоянных магнитов, например, редкоземельных, применение известного способа в условиях, связанных с преобразованием магнитной энергии в другие виды энергии, становится проблематичным прежде всего из-за низкого коэффициента полезного действия.
Техническим результатом заявленного способа и устройства для его осуществления является расширение диапазона регулирования величины магнитного потока в зависимости от заданного закона регулирования, обеспечение возможности создания управляемых аккумуляторов магнитной энергии на основе конструирования устройств для реализации данного способа с заданными параметрами, простота регулирования и упрощение конструкции устройства, исключение размагничивания постоянного магнита при использовании данного способа управления.
Технический результат заявленного способа управления магнитным потоком, создаваемым постоянным магнитом, достигается тем, что в способе, заключающимся в том, что разноименные полюса постоянного магнита замыкают между собой накоротко посредством шунта и формируют управляющий магнитный поток, вектор плотности которого перпендикулярен вектору плотности магнитного потока, создаваемого в магнитном шунте указанным постоянным магнитом, магнитный шунт выполняют из изотропного по магнито-электрическим параметрам, например, по магнитной проницаемости, магнитной индукции насыщения и удельному электрическому сопротивлению, материала, а управление магнитным потоком осуществляют путем регулирования магнитного сопротивления магнитного шунта, изменяя величину сформированного управляющего магнитного потока.
Кроме того, магнитопровод постоянного магнита выполняют с рабочим немагнитным зазором, в котором измеряют величину рабочего магнитного потока, преобразуют ее в сигнал управляющего воздействия по заданному закону, в соответствии с которым изменяют величину формируемого управляющего магнитного потока.
Магнитный шунт выполнен из железоникелевого сплава, например, пермаллоя, марки 45 H или 50 H, имеющего следующие характеристики:
где μ магнитная проницаемость,
Hc коэрцитивная сила,
Bs магнитная индукция насыщения,
r удельное электрическое сопротивление.
Устройство для осуществления способа содержит постоянный магнит, разноименные полюса которого замкнуты накоротко посредством магнитного шунта, задатчик величины управляющего воздействия, элемент управления магнитным сопротивлением шунта, магнитный шунт из изотропного по магнитно-электрическим параметрам, например, по магнитной проницаемости, магнитной индукции насыщения и удельному электрическому сопротивлению, материала, выход задатчика величины управляющего воздействия соединен с управляющим входом элемента управления магнитным сопротивлением шунта, установленным с возможностью формирования результирующего вектора плотности магнитного поля через магнитный шунт по заданному закону.
Магнитный шунт выполнен из железоникелевого сплава, например, пермаллоя, марки 45 H или 50 H, имеющего следующие характеристики:
где μ магнитная проницаемость,
Hc коэрцитивная сила,
Bs магнитная индукция насыщения,
r удельное электрическое сопротивление.
Элемент управления магнитным сопротивлением шунта выполнен в виде дросселя, с одной стороны магнитопровода которого размещена обмотка управления, выводы которой являются управляющим входом элемента, а другая сторона является магнитным шунтом устройства.
Магнитопровод постоянного магнита выполнен с рабочим немагнитным зазором, в котором размещен измеритель величины магнитного потока, выход которого соединен с информационным входом задатчика величины управляющего воздействия.
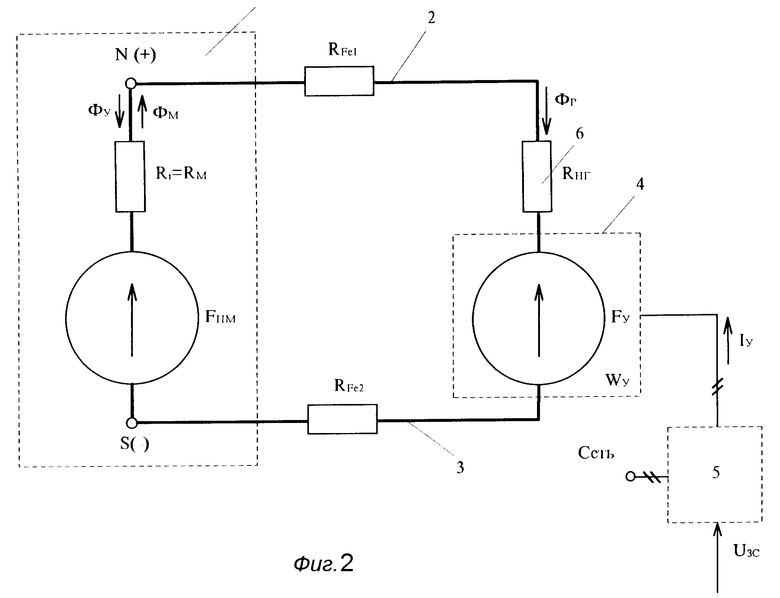
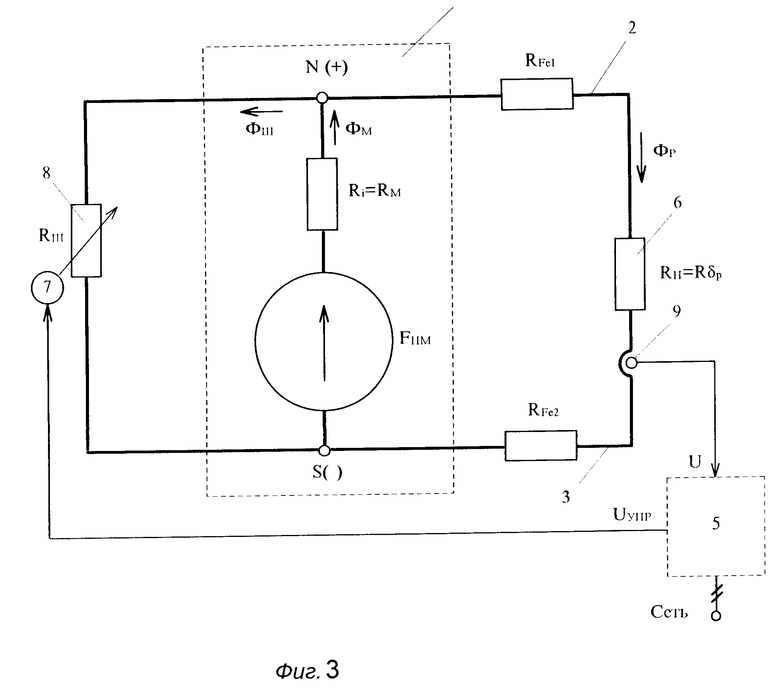
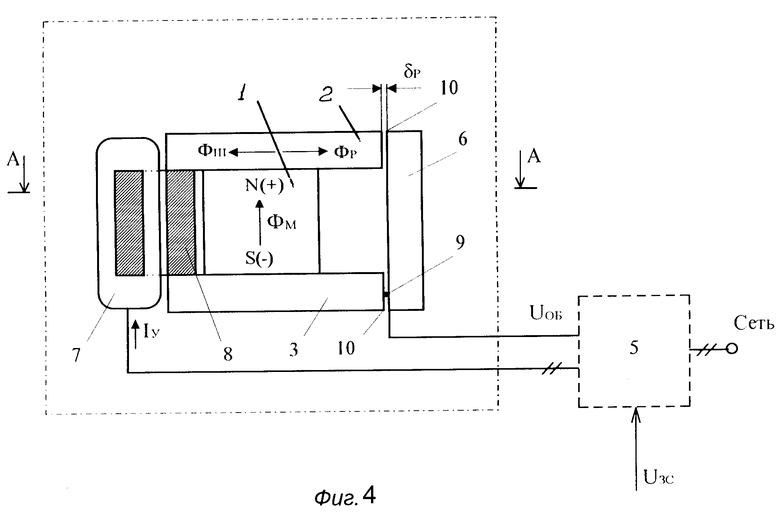
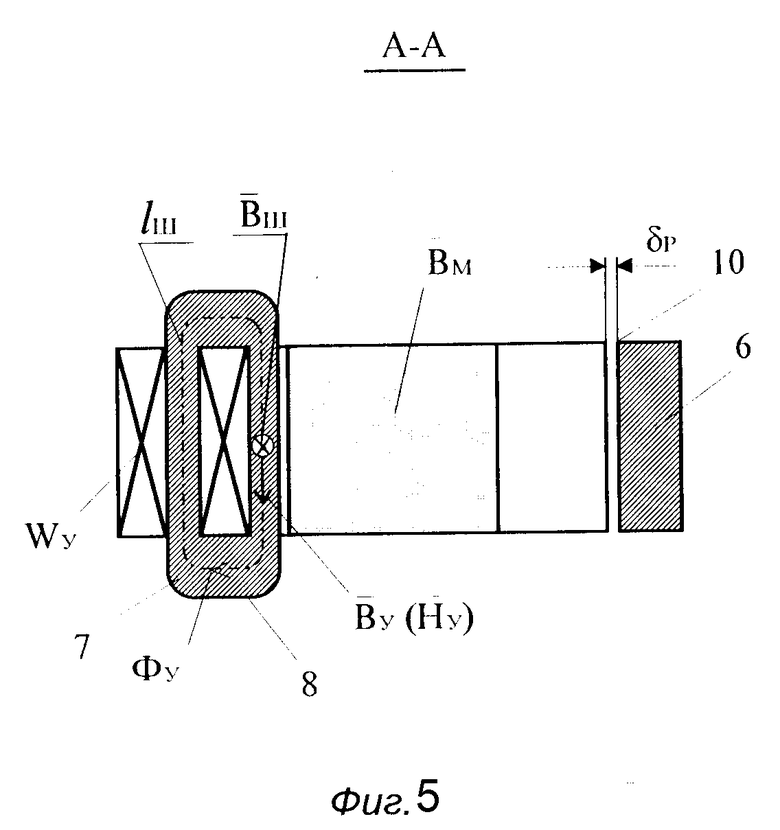
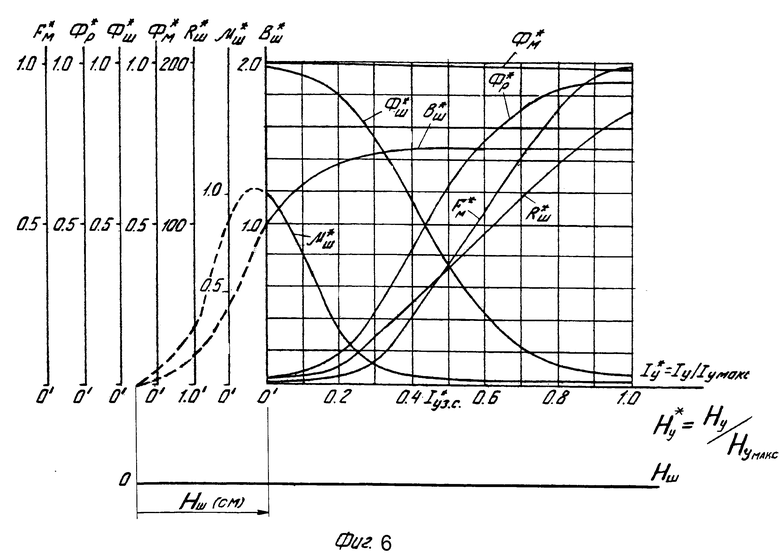
На фиг. 1 приведен пример эквивалентной схемы замещения по предложенному способу по п. 1 формулы; на фиг. 2 пример эквивалентной схемы замещения по известному способу прямого управления магнитным потоком путем введения дополнительного источника магнитодвижущей силы, направление магнитного потока которого имеет продольный характер (без учета магнитного потока рассеяния); на фиг. 3 пример эквивалентной схемы замещения по пп. 2 и 7 в случае выполнения магнитопровода с рабочим немагнитным зазором; на фиг. 4 пример выполнения устройства для реализации заявленного способа в случае выполнения элемента управления магнитным сопротивлением шунта в виде дросселя по пп. 4 и 6; на фиг. 5 сечение А-А на фиг. 4; на фиг. 6 регулировочные характеристики разных параметров в зависимости от управляющего тока или напряженности управляющего магнитного потока.
На фиг. 2 представлена эквивалентная схема замещения одного из устройств, реализованного по известному способу прямого управления рабочим магнитным потоком (ΦР) постоянного магнита 1 с магнитопроводами 2 и 3 путем введения дополнительного источника 4 магнитодвижущей силы (Fy), магнитный поток (ΦУ) которого имеет продольный характер.
На фиг. 2 магнитные сопротивления соответственно магнитопровода 2 и 3 обозначены RFe1 и RFe2, где задатчик величины управляющего воздействия позиция 5.
В этой схеме замещения постоянный магнит 1 является аккумулятором магнитной энергии, обладающим магнитодвижущей силой
FПМ=(-HС)•lМ,
где HС коэрцитивная сила постоянного магнита, взятая с учетом знака "-" из кривой размагничивания;
lМ длина постоянного магнита 1 в направлении его намагниченности.
Внутреннее магнитное сопротивление (Ri) равно магнитному сопротивлению постоянного магнита
где
μМ магнитная проницаемость вещества постоянного магнита;
SМ площадь поперечного сечения постоянного магнита в его нейтральной плоскости.
При размещении ферромагнитной детали 6(RДЕТ) с рабочим немагнитном зазором магнитопровода, выполненного в соответствии с фиг. 2, нагрузочное магнитное сопротивление (RНГ) аккумулятора 1 определяется следующим образом: (3)
(3)
где  магнитное сопротивление рабочего немагнитного зазора в месте сопряжения ферромагнитной детали (RДЕТ) с магнитопроводом 2 и 3.
магнитное сопротивление рабочего немагнитного зазора в месте сопряжения ферромагнитной детали (RДЕТ) с магнитопроводом 2 и 3.
Под сопротивлением (RДЕТ) понимают магнитное сопротивление, оказываемое веществом детали 6 протекающему по нему рабочему магнитному потоку (ΦР) со стороны аккумулятора 1.
В результате передачи магнитной энергии со стороны аккумулятора 1 в рабочий немагнитный зазор (на чертеже не показано) ферромагнитная деталь, подлежащая механической обработке (например, шлифованию) начинает притягиваться к магнитопроводам 2 и 3 с силой
где  магнитная индукция в рабочем зазоре (δp);
магнитная индукция в рабочем зазоре (δp); площадь поперечного сечения двух рабочих немагнитных зазоров (δp);
площадь поперечного сечения двух рабочих немагнитных зазоров (δp);
магнитная проницаемость рабочего немагнитного зазора, приблизительно равная магнитной проницаемости вакуума μo = 4•π•10-7 Гн/м.
Для регулирования силы притяжения детали (на чертеже не показана) (FМ) служит электромагнит 4, по обмотке которого пропускают управляющий ток (Iу) со стороны задатчика 5 величины управляющего воздействия, связанного с электрической сетью и работающего в соответствии с вводимыми в него задающим сигналом (UЗС).
При пропускании по обмотке электромагнита 4, имеющего общий магнитопровод с источником МДС (FПМ) (постоянным магнитом), постоянного тока (Iу) в магнитной цепи создается сторонний источник МДС (Fу), направленной в противоположном по отношению к МДС (FПМ) направлении, в результате чего величина рабочего магнитного потока (ΦР) в обрабатываемой детали может быть снижена от максимального значения (ΦРмакс), при котором производилась ее механическая обработка (FМ=FМмакс), до нулевого значения, при котором в случае отсутствия остаточного намагничивания детали сила FМ 0 и деталь может быть удалена с рабочей поверхности магнитной плиты по окончании механической обработки.
Выражение для рабочего магнитного потока имеет вид:
Такой способ управления требует больших затрат энергии при низком к.п.д.
Сущность заявленного изобретения поясняется фиг. 1, где представлена эквивалентная схема замещения по п. 1 и п. 4 заявленного способа и устройства для его реализации.
На фиг. 1 приведен постоянный магнит 1 (аккумулятор магнитной энергии) как источник магнитодвижущей силы (FПМ), обладающий внутренним сопротивлением (Ri), равным магнитному сопротивлению постоянного магнита (RМ), определяемому по формуле (2), (N) и (S) разноименные полюса постоянного магнита 1, UУПР сигнал величины управляющего воздействия поступающего от задатчика 5 величины управляющего воздействия, элемент управления магнитным сопротивлением шунта 7, магнитный шунт 8 с магнитным сопротивлением шунта (RШ).
На фиг. 3 представлена эквивалентная схема замещения для случая выполнения магнитопровода с рабочим немагнитным зазором, в котором установлен измеритель 9 величины рабочего магнитного потока, выполненный, например, в виде датчика Холла.
Пример выполнения устройства, представленный на фиг. 4 и 5, и его сечение содержит постоянный магнит 1, магнитопровод которого содержит рабочий немагнитный зазор 10, в котором размещена ферромагнитная деталь 6, датчик 9 Холла установлен в немагнитном рабочем зазоре 10 и измеряет величину магнитного потока в зазоре. Элемент управления 7 магнитным сопротивлением шунта 8 выполнен в виде дросселя, с одной стороны которого размещена обмотка управления (Wу), выводы которой являются управляющим входом элемента 7 управления, другая сторона магнитопровода дросселя является магнитным шунтом 8.
Устройство работает следующим образом.
Рабочий магнитный поток (ΦР) подлежащий регулированию, протекает по магнитопроводу 2, имеющему магнитное сопротивление (RFe1) от северного полюса (N) (или клеммы "+" по аналогии с аккумулятором электрической энергии) аккумулятора 1 магнитной энергии (постоянного магнита) в зону крепления ферромагнитной детали 6, магнитное сопротивление которой (т. е. зоны) на схеме обозначено в виде нагрузочного сопротивления аккумулятора 1 (RНГ), равного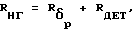
где  магнитные сопротивления рабочего немагнитного зазора 10,
магнитные сопротивления рабочего немагнитного зазора 10,
δp рабочий немагнитный зазор в месте сопряжения обрабатываемой детали 6 с магнитопроводами 2, 3;
RДЕТ магнитные сопротивления детали, и далее по магнитопроводу 3, имеющему магнитное сопротивление  к южному полюсу (S) (или к клемме "-" по аналогии с аккумулятором электрической энергии).
к южному полюсу (S) (или к клемме "-" по аналогии с аккумулятором электрической энергии).
Для управления рабочим магнитным потоком (ΦР) с целью изменения величины силы (FМ), приложенной к обрабатываемой детали 6, северный (N(+)) и южный (S(-)) полюса аккумулятора 1 магнитной энергии (постоянного магнита), обладающего источником магнитодвижущей силы (МДС) (FПМ) и внутренним магнитным сопротивлением (Ri), равном магнитному сопротивлению постоянного магнита (RМ), по которому протекает магнитный поток (ΦМ) внутри постоянного магнита, замыкают между собой кратчайшим путем управляемым магнитным шунтом 8, изготовленным из изотропного материала, обладающего повышенными значениями магнитной проницаемости μ индукции насыщения (Bs), удельного электрического сопротивления r и пониженным значением коэрцитивной силы (HС), магнитное сопротивление (RШ) которого регулируют с помощью дополнительного источника магнитодвижущей силы (Fу) создающего в магнитном шунте 8, электрически связанного с задатчиком величины управляющего воздействия 5 поперечный по отношению к магнитному потоку (ΦШ) со стороны постоянного магнита (аккумулятора магнитной энергии) 1 магнитный поток управления (ΦУ) и изменяют величину рабочего магнитного потока (ΦP) и пропорциональную ему силу (FМ) (на чертеже не показано), приложенную к обрабатываемой детали 6.
Диапазон регулирования рабочего магнитного потока (ΦP) и силы (FМ) ограничивается двумя крайними режимами работы аккумулятора магнитной энергии (постоянного магнита) 1:
1). При минимально возможном значении магнитного сопротивления (RШ) шунта 8, когда по нему протекает максимальный поток (ΦШ) приблизительно равный магнитному потоку (ΦМ(к)) при коротком замыкании аккумулятора магнитной энергии 1 (RШ < RНГ; ΦШ ≈ ΦМ(к); ΦP ≈ 0 FМ ≈0).
2). При максимально возможном значении магнитного сопротивления (RШ) шунта 8, когда по нему протекает минимальный поток (ΦШ) близкий к нулю (RШ > RНГ, ΦШ ≈ 0; ΦP ≈ ΦМ; FМ FМмакс).
Для стабилизации выбранного из указанного выше диапазона регулирования номинального значения рабочего магнитного потока (ΦРН) и ввода этого значения с помощью задающего сигнала (UЗС) в задатчик 5 устройство охватывают обратной связью сигнала (UОБ) посредством расположенного в зоне крепления ферромагнитной детали 6 измерителя величины магнитного потока 9, например, датчиком Холла.
Поведение электромагнитной системы по схеме замещения, представленной на фиг. 3, и реализации устройства, приведенного на фиг. 4, при изменении управляющего тока (Ii) в пределах указанного выше диапазона регулирования иллюстрируется фиг. 6, где помещены в системе координат (0') регулировочные характеристики, представляющие собой зависимости (в относительных единицах) магнитной индукции B
Из графиков зависимости μШ = f1(HШ) и BШ f2(HШ) в системе координат (0) видно, что при отсутствии управляющего сигнала (IУ 0; HУ 0) на магнитный шунт 8 со стороны постоянного магнита 1 воздействует сторонний источник МДС (смешение) FШ(см), создающий в шунте продольное магнитное поле, напряженность которого равна (HШ(см)).
Предлагаемый способ и устройство, его реализующее, позволяет повысить эффективность преобразования магнитной энергии постоянных магнитов 1 (аккумуляторов магнитной энергии) в другие виды энергии, в том числе, в механическую энергию за счет сравнительно небольшой мощности, расходуемой на управление рабочим потоком (ΦP) исключить размагничивание постоянного магнита как при его работе, так и в нерабочем состоянии, поскольку при использовании предлагаемого способа выполняется условие отсутствия размагничивания постоянного магнита, записанное для его полюсов (фиг. 3) в следующем виде:
ΦМ ≈ ΦШ + ΦP = const. (6)и
Использование: изобретение относится к технике, использующей различные виды устройств, преобразующих магнитную энергию постоянных магнитов в разнообразные виды энергии (механическую, электрическую, тепловую, световую и другие). Сущность: в способе предложен принцип управления магнитным потоком путем управления рабочим магнитным сопротивлением магнитного шунта в цепи постоянного магнита. Этот принцип определяет работу устройства, реализующего данный способ как усилителя магнитного потока. Изобретение позволяет расширить диапазон регулирования величины магнитного потока в зависимости от заданного закона регулирования, упростить устройство и процесс регулирования. 2 с. и 5 з. п. ф-лы, 6 ил.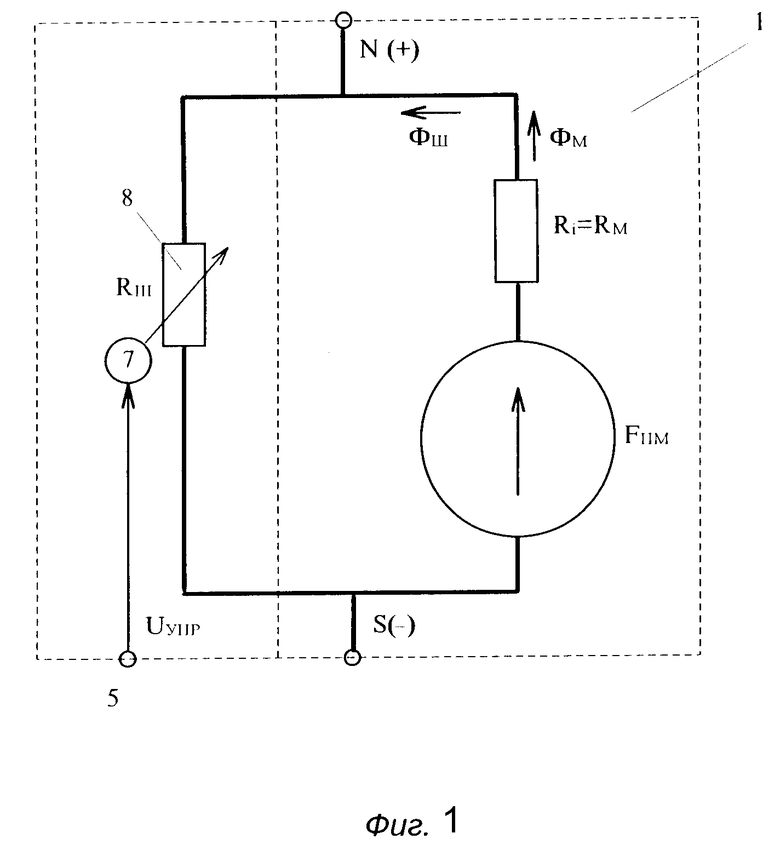
μmax = 25•10-3 Тл.М/A, Hc = 24 A/м, Bs = 1,5 Тл,
ρ = 0,45 Ом•мм2/м,
где μ - магнитная проницаемость;
Нс коэрцитивная сила;
Вs магнитная индукция насыщения;
ρ - удельное электрическое сопротивление.
μmax = 25•10-3 Тл.М/A, Hc = 24 A/м, Bs = 1,5 Тл,
ρ = 0,45 Ом•мм2/м,
где μ - магнитная проницаемость;
Нс коэрцитивная сил;
Вs магнитная индукция насыщения;
ρ - удельное электрическое сопротивление.
| Верников А.Я | |||
| Магнитные и электромагнитные приспособления в металлообработке | |||
| - М.: Машиностроение, 1984, с.5-23. |
