Изобретение относится к области электротехники, в частности к электромагнитным приводам, и может быть использовано в приборах, элементах управления, защитных и коммутационных устройствах, например в реле и контакторах.
Известен способ управления магнитным потоком постоянных магнитов в электромагнитных поляризованных коммутационных системах путем его многократного размагничивания и подмагничивания, изменяя его удельную энергию (кДж/м3)для согласования магнитного потока, создаваемого постоянным магнитом с магнитно-движущей силой обмотки, которые задаются в соответствии с механической характеристикой изделия. При этом размагничивание постоянного магнитапроизводят с начальных значений магнитного потока, как правило, превышающих на 10-15% необходимый поток в рабочих зазорах отрегулированного изделия, в котором такой постоянный магнит предполагается использовать, воздействием импульсами внешнего магнитного поля большой энергии. Необходимость проведения этой операции вызвана технологическим разбросом основных магнитных параметров выпускаемых промышленностью постоянных магнитов, которые колеблются по ГОСТ 17809 до величин, равных 15% от их средних арифметических значений. В то же время технологическая точность МДС обмотки или других параметров электромагнитной и механической систем, для которых используются постоянные магниты, составляет 3-5%.Однако, способ размагничивания и подмагничивания постоянного магнита для согласования магнитного потока, создаваемого постоянным магнитом, с магнитно-движущей силой обмотки, применим в магнитных системах, в которых установлены постоянные магниты, относящиеся к группе докритических, например, из литых сплавов альнико по ГОСТ17809,см. ( Пятин Ю.М. Материалы в приборостроении и автоматике. Справочник. Машиностроение, 1982 г., с.224-235). В справочнике приводится обоснование применения такой технологии размагничивания и подмагничивания.
Между тем, конструктивные решения электромагнитных поляризованных систем, в том числе, коммутационных слаботочных реле, контакторов и др. с применением высококоэрцитивных магнитов на основе редкоземельных элементов имеют очевидные преимущества и эффективны, так как удельная энергия высококоэрцитивных магнитов на основе редкоземельных элементов в 4-9 раз выше литых магнитов. В намагниченном состоянии они могут длительно храниться и применяться для различных систем, в сочетании с различными элементами электромагнита. Однако управление рабочим магнитным потоком в такой магнитной системе с заданными параметрами электромагнита, в соответствии с которыми изделие изготовлено, является энергоёмкой и трудоемкой операцией, отличается низкой точностью, что предопределено свойствами закритичных магнитов с высокой коэрцитивной силой, какими являются высококоэрцитивные магниты на основе редкоземельных элементов, которые отражает кривая размагничивания такого магнита при воздействии стороннего размагничивающего поля высокой напряженности, см. Пятин Ю.М. Материалы в приборостроении и автоматике. Справочник. Машиностроение, 1982 г., с. 25. Как правило, энергия магнитного поля закритичных магнитов в состоянии поставки превышает необходимую энергию для создания необходимого магнитного потока, величина которого бы соответствовала параметрам электромагнитной системы изделия. Удельная энергия закритичного постоянного магнита может быть понижена только воздействием импульсов внешнего магнитного поля большой энергии, при повышенных (более 150 градусов) температурах, а в большинстве применяемых электромагнитных схем такое понижение не возможно. Поэтому в большинстве, случаев энергию понижают механической обработкой магнита, уменьшая его объём, размеры, не изменяя при этом величину удельной энергии, что экономически не выгодно и трудоемко.
Необходимая технологическая точность параметров, в частности, соответствие такого параметра, как удельная энергия магнитного поля параметрам остальных элементов магнитной системы, у высококоэрцитивных постоянных магнитов меньше, чем у литых магнитов альнико. Поэтому производство изделий (например, контакторов, реле) с использованием высококоэрцитивных магнитов осуществляется селективной сборкой,то есть с использованием механической обработки, как было упомянуто выше, во время которой подбирают,формируютсоответствующие параметры с неизбежным отходом дорогостоящих материалов и деталей. При этом такой обработанный магнит в будущем, необходимо использовать только для электромагнитной системы с такими же параметрами, как та, для которой его обработали.
Известен способ управления рабочим магнитным потоком в устройствах с использованием комплекта постоянных магнитов и/или электромагнитов с полями определенной направленности и величины напряженности, за счет наложения друг на друга формируемых в устройствах полей магнитных потоков постоянных магнитов противоположной направленности (EP 1717125 B1, 29.10.2008).
Известны способы управления магнитным потоком, создаваемым постоянным магнитом в зазоре между полюсными наконечниками магнита, являющимися концентраторами магнитной энергии магнита, путем введения в зазор магнитного шунта, выполненного из магнитопроводящего материала в виде винта, устанавливаемого в отверстии одного из полюсных наконечников (патент RU №2130665, H01h 35/14) или путем введения магнитного шунта в виде стержня переменного сечения, установленного в отверстии одного полюсного наконечника, через зазор в отверстие другого полюсного наконечника(патент RU №2522891 H01H 35/14). При этом размещение шунта или связанных с ним конструктивных элементов происходит с наружи, на периферии электромагнитной системы, в зонах малой плотности силовых магнитных линий, а наибольшая концентрация магнитной энергии постоянного магнита находится в центре концентрирующей магнитную энергию части полюсных наконечников, то есть их поверхности, соприкасающейся с магнитом (магнитами). При этом не эффективно используется объем магнита. Регулирование магнитного потока происходиттолько за счет изменения величины немагнитного зазора, следовательно, величина рабочего усилия притяжения элемента механической системыизменяется по квадратичной зависимости (параболе), то есть не происходит плавного его изменения, а достижение необходимого магнитного потока затруднено (см. В.З.Ройзен «Электромагнитные малогабаритные реле» Энергоатомиздат,1986, Ленинград, стр. 40-47, табл. 2-4 (15, 16).
Недостатком такого способа является повышенная трудоемкость обеспечения точной настройки устройств, реализующих такой способ т.к. незначительное перемещение регулировочного винта или стержня, приводит к значительному (резкому) изменению магнитного поля и, соответственно, изменению порога срабатывания устройства.
Известен способ управления магнитным потоком, создаваемым постоянным магнитом в электромагнитной поляризованной системе. В соответствии со способом в системе формируют управляющий магнитный поток, встречный магнитному потоку постоянного магнита с помощью шунта, установленного в магнитопроводе и замыкающего разноименные полюса постоянного магнита, уменьшая поток (авторское свидетельство SU №826430). В этом случае через шунт проходит управляющий магнитный поток и поляризующий магнитный поток, и на перемагничивание шунта для осуществления срабатывания системы (осуществление обратного хода электромагнитного привода) требуется дополнительная энергия. В случае использования в качестве аккумуляторов магнитной энергии высокоэнергетических постоянных магнитов, например, редкоземельных, применение известного способа в условиях, связанных с преобразованием магнитной энергии в другие виды энергии, становится проблематичным, прежде всего из-за низкого коэффициента полезного действия.
При этом все вышеупомянутые способы применимы при использовании в магнитной системе постоянных магнитов, относящихся к группе докритических.
Промышленно выпускаемые из закритических материалов высококоэрцитивные магниты характеризуются, как было упомянуто выше, большой энергией рабочего магнитного поля, превышающей, как правило, необходимую величину, соответствующую необходимым технологическим размерам и формам используемых конструктивных элементов магнитной системы. В этом случае наблюдается большойтехнологический разброс параметров постоянного магнита и используемой в сочетании с ним магнитной системы. При этом затруднительно заранее предусмотреть необходимые технологические размеры и формы используемых конструктивных элементов магнитной системы, которые бы позволили осуществить управление магнитным потоком, уменьшая его до величины, согласованной с параметрами системы, обусловленной размерами ее элементов. Приемы, обеспечивающие возможность плавно или с небольшим дискретным шагом управлять рабочим магнитным потоком, многократно изменяяего,добиваясь соответствия заданных параметров поляризованных электромагнитных систем и параметрам закупленных высококоэрцитивных магнитовнеизвестны.
Известен способ управления магнитным потоком, создаваемым постоянным магнитом, заключающийся в том, что разноименные полюса постоянного магнита замыкаются между собой накоротко посредством магнитного шунта.
Шунтирующим элементом обычно служат стальные полюса адаптера, которые во включенном состоянии расположены строго напротив полюсов постоянного магнита, а в отключенном замыкают (шунтируют) его разноименные полюса. Известное устройство для реализации этого способа содержит постоянный магнит, разноименные полюса которого замкнуты накоротко магнитным шунтом, и элемент, задающий величину управляющего воздействия, предназначенного для компенсационного управления.
Известным способам с прямым регулированием рабочего магнитного потока с помощью дополнительного источника магнитодвижущей силы в виде электромагнита присущ следующий недостаток: большие энергетические затраты, связанные с преобразованием магнитной энергии, накопленной в постоянном магните, являющимся аккумулятором магнитной энергии, в другие виды энергии, например, в механическую.
При прямом способе регулирования осуществляют воздействие на поле постоянного магнита посредством стороннего магнитного поля, имеющего, как правило, продольный характер, например, по плотности магнитного потока, постоянный магнит по мере увеличения магнитного поля начинает размагничиваться.
По достижении напряженности управляющего магнитного потока значения, равного коэрцитивной силе постоянного магнита, рабочий магнитный поток становится равным нулю.
В случае использования в качестве аккумуляторов магнитной энергии высокоэнергетических постоянных магнитов, например, редкоземельных, применение известного способа в условиях, связанных с преобразованием магнитной энергии в другие виды энергии, становится проблематичным прежде всего из-за низкого коэффициента полезного действия(Верников А.Я. Магнитные и электромагнитные приспособления в металлообработке. - М.: Машиностроение, 1984, с.5-23).
Наиболее близким к заявляемому способу является способ управления магнитным потоком, создаваемым постоянным магнитом, при котором разноименные полюса постоянного магнита замыкают между собой накоротко посредством шунта, установленного между полюсными наконечниками постоянного магнита, проводящими рабочий магнитный поток в образованный наконечниками рабочий немагнитный зазор с размещенным в нем рабочим элементом (в данном случае – это деталь, которую необходимо неподвижно закрепить, усилием прижатия ее к поверхности наконечников), и формируют управляющий магнитный поток, вектор плотности которого перпендикулярен вектору плотности магнитного потока, создаваемого в магнитном шунте указанным постоянным магнитом, магнитный шунт выполняют из изотропного по магнито-электрическим параметрам, например, по магнитной проницаемости, магнитной индукции насыщения и удельному электрическому сопротивлению, материала, а управление магнитным потоком осуществляют путем регулирования магнитного сопротивления магнитного шунта, изменяя величину сформированного управляющего магнитного потока при взаимодействии его с магнитным потоком электромагнита, имеющего общий магнитопровод с постоянным магнитом, при пропускании электрического тока по его обмотке до достижения с помощью управляющего магнитного потока величины, при котором величина рабочего магнитного потока в немагнитном рабочем зазоре, становится достаточной для срабатывания системы, При этом поток, создаваемый электромагнитом, регулируют по величине с помощью управляющего воздействия на параметры электромагнита, для чего в рабочем немагнитном зазоре измеряют величину рабочего магнитного потока и преобразуют его в сигнал управляющего воздействия по заданному закону, сформированного в соответствии с требуемым порогом срабатывания системы.
По сути этот способ относится к способу управления магнитным потоком в поляризованной электромагнитной системе, образованной постоянным магнитом и электромагнитом, в которой для формирования необходимого для срабатывания системы (создания необходимого усилия для воздействия на рабочий элемент) изменяют параметры и характеристики электромагнитной системы.При этом поток, создаваемый электромагнитом, регулируют по величине с помощью управляющего воздействия на параметры электромагнита, для чего в рабочем немагнитном зазоре измеряют величину рабочего магнитного потока и преобразуют его в сигнал управляющего воздействия по заданному закону, сформированного в соответствии с требуемым порогом срабатывания системы (патент RU №2092922, 10.10.1997).
Как уже упоминалось, при изготовлении различных устройств на основе электромагнитной поляризованной системы, сталкиваются с проблемой, когда от поставщиков поступают магниты из высококоэрцитивных материалов на основе редкоземельных элементов, магнитный поток которых превышает магнитный поток, необходимый для срабатывания предварительно изготовленной электромагнитной системы, так как изготовление таких магнитов со строго определенной напряженностью магнитного поля является трудно осуществимой задачей. При этом главнойпроблемой является отсутствие возможности изменять рабочий магнитный поток таких магнитов, добиваясь величины, соответствующей заданным параметрам поляризованных электромагнитных систем в окончательно собранном состоянии. Особенные трудности вызывает осуществление плавного или с небольшим дискретным шагом изменениярабочего магнитного потока. При этом изменение параметров электромагнитов в сторону уменьшения или увеличения для взаимодействия с постоянными магнитами из высококоэрцитивных материалов в таких устройствах, как правило, не предусмотрено, так как в противном случае, потребовало бы дополнительных затрат и увеличения габаритов устройств в целом
Таким образом, к недостаткам известного способа можно отнести его ограниченные технологические возможности. Действительно, использовать его для управления магнитным потоком, создаваемым постоянным магнитом извысоко коэрцитивного на основе редкоземельных элементов материала для необходимого взаимодействия с электромагнитной системой, изготовленной с предварительно сформированными силовой и электромагнитной характеристиками с заданными параметрами, добиваясь достижения величины магнитного потока в наибольшей степени соответствующей этим заданным номинальным параметрам для, например, воздействия на рабочий элемент, каким является якорь, не представляется возможным. Но именно это положительно бы влияло на точность и надежность срабатывания таких устройств в течение всего жизненного цикла изделий, а также возможности плавного и/или с небольшим дискретным шагом управления магнитным потоком. Поэтому область практического использования известного способа достаточно узкая, а универсальность способа соответственно недостаточно широкая. Эти недостатки обусловлены также и размещением шунта снаружи постоянного магнита, на периферии магнитной системы, в зонах малой плотности силовых магнитных линий, что уменьшает эффективность способа. Как уже указывалось, известно, что наибольшая концентрация магнитной энергии постоянного магнита находится в части полюсных наконечников, являющихся концентраторами магнитной энергии магнитов. Поверхность этой части соприкасается с магнитом.
В современных поляризованных магнитных системах применяются постоянные магниты из литых сплавов альнико по ГОСТ 17809 с соотношением толщины к площади полюса один к пятидесяти (1/50). Для магнитов на основе редкоземельных элементов это отношение будет увеличено в 4 и более раза, в миниатюрных системах магниты практически принимают вид толстых пленок покрывающих поверхности полюсных наконечников, см. Пятин Ю.М. Материалы в приборостроении и автоматике. Справочник. Машиностроение, 1982 г., с. 79. Магниты вместе с полюсными наконечниками полностью занимают площадь одной из граней устройств, тем самым расстояния от шунта расположенного на периферии магнитной системы до её центра значительно увеличат сопротивление шунтирующей цепи, для его компенсации потребуется уменьшение немагнитного шунтирующего зазора и увеличения диаметра шунта, что снизит точность управления магнитным потоком в рабочем зазоре системы. Кроме того, при уменьшенном расстоянии, сравнимым с величиной рабочего зазора, между полюсными наконечниками, равном толщине редкоземельного магнита, магнитная проводимость (поток рассеяния, утечки) между элементами специально созданными на периферии полюсных наконечников и предназначенными для образования шунтирующей цепи, размещения шунта (шунтов) потребует, для сохранения полезного (рабочего) потока, значительного увеличения энергии, объёма магнита и как следствие веса, габаритов и себестоимости устройств, см. стр.78 М. И. Виттенберг, РАСЧЁТ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ, «ЭНЕРГИЯ», 1975. Особенно это проявляется при применении дорогостоящих закритичных магнитов на основе элементов Sm, Co в устройствах специального (например, аэрокосмического) применения. Минимизация потоков рассеяния (утечек) является признаком совершенства конструкции. Потоки рассеяния неизбежны в любых электромагнитных устройствах, введение в конструкцию дополнительных элементов, их увеличивающих, ухудшает все характеристики устройств и должно иметь серьезное обоснование. При применении тонких, современных магнитов это не допустимо.
Известны различные устройства, реализующие способы управления магнитным потоком постоянных магнитов в электромагнитных поляризованных коммутационных системах. Так, например, известно устройство по патенту RU№2474000. В этом устройстве управление магнитным потоком осуществляют с помощью тонкого дискового шунта, которым перекрывается вся или часть поверхности магнита. Аналогично устройству полезной модели RU №62482, где шунт самопроизвольно занимает устойчивое положение. Максимального изменения магнитной энергии высококоэрцитивного магнита в системе не происходит, и тем самым недостатком этого решения остаётся также отсутствие возможности изменять рабочий поток системы в соответствии с параметрами системы. В этом случае также используют селективную подгонку размеров и/или формы шунта, то есть изменение размеров шунта путем механического изменения его формы, размеров, что, как уже указывалось, трудно осуществимо и экономически невыгодно.
Известно устройство, содержащее магнитный шунт в виде пластины из ферромагнитногоматериала для регулировки индукции в воздушном зазоре магнитной системы механизма путем перемещения шунта. При этом происходит перераспределение магнитных потоков через воздушный зазор и шунт. Это необходимо, например, для изменения чувствительности механизма(см. книга «Основы метрологии и электрические измерения» Авдеев Б. Я., Антонюк Е. М., Душин Е. М..1987г. 621.317.08003698480).
Известен переключатель, в котором также используется магнитный шунт в виде регулировочного винта из магнитопроводящего материала, установленного в отверстии одного из наконечников рядом с магнитом. Перемещение винта вращательным движением вдоль магнита в направлении другого наконечника позволяет менять параметры магнитного поля в зоне рабочего хода приводимого в движение элемента и порог срабатывания (см. патент RU №2130665). Однако, такие шунты, в рабочих зазорах механизмов с постоянными магнитами не достаточно эффективны, так как расположены снаружи постоянного магнита, в зонах малой плотности силовых магнитных линий. Кроме того, использование таких механизмов возможно только в приборостроении, где отсутствуют магнитные потоки большой величины.
Известны различные устройства, реализующие способы управления магнитным потоком постоянных магнитов в электромагнитных поляризованных коммутационных системах. Так, например, известно устройство по патенту RU №2474000. В этом устройстве управление магнитным потоком осуществляют с помощью тонкого дискового шунта, которым перекрывается вся или часть поверхности магнита. Аналогично устройство по полезной модели №62482, где шунт самопроизвольно занимает устойчивое положение. Максимального изменения магнитной энергии высококоэрцитивного магнита в этих системах не происходит, и, тем самым, недостатком этого решения остаётся также отсутствие возможности изменять рабочий поток системы в соответствии с параметрами системы. В этом случае также используют селективная подгонка размеров и/или формы шунта, то есть изменение размеров шунта путем механического изменения его формы, размеров, что, как уже указывалось, трудно осуществимо, экономически невыгодно.
Кроме того, размещение шунта или связанных с ним конструктивных элементов снаружи, на периферии электромагнитной системы, в зонах малой плотности силовых магнитных линий неэффективно и приводит к увеличению габаритов, веса шунта и всей магнитной системы.
Известно устройство, содержащее магнитный шунт в виде пластины из ферромагнитногоматериала для регулирования индукции в воздушном зазоре магнитной системы механизма путем перемещения шунта, размещенного в этом зазоре. При этом происходит перераспределение магнитных потоков через воздушный зазор и шунт. Это необходимо, например, для изменения чувствительности механизма(см. книга «Основы метрологии и электрические измерения» Авдеев Б. Я., Антонюк Е. М., Душин Е. М..1987г. 621.317.08003698480). Однако в случае использования высококоэрцитивного закритичного магнита оно также не эффективно.
Известен переключатель, в котором также используется магнитный шунт в виде регулировочного винта из магнитопроводящего материала, установленного в отверстии одного из наконечников рядом с магнитом. Перемещение винта вращательным движением вдоль магнита в направлении другого наконечника позволяет менять параметры магнитного поля в зоне рабочего хода приводимого в движение элемента и порог срабатывания (см. патент RU №2130665). Однако, такие шунты, вводимые в рабочие зазоры механизмов с постоянными магнитами не достаточно эффективны, так как расположены снаружи постоянного магнита, в зонах малой плотности силовых магнитных линий и значительных потерь магнитного потока (утечек).
Наиболее близким к заявляемому изобретению техническим решением, относящимся к устройству, является электромагнитная поляризованная система по авторскому свидетельству № SU 826430.
Известное устройство содержит поляризованный электромагнит, содержащий катушку и магнитопровод, включающий в себя ярмо и фланец, плунжер, установленный с возможностью возвратно-поступательного перемещения и кольцевой постоянный магнит, причем, он снабжен другим магнитопроводом, содержащим пластину из магнитомягкого материала и шунты, выполненные в виде секторов кольца, при этом плунжер упирается в пластину из магнитомягкого материала, а кольцевой постоянный магнит и шунты расположены концентрично иустановленымежду пластиной и фланцем (авторское свидетельство SU № 826430 МПК Н01Р 7/16).
Однако, если магнит представляет собой высококоэрцитивный закритичный магнит, сформировать необходимое воздействие, соответствующее остальным параметрам электромагнитной системы в этом решении также затруднительно.
Действительно, описаннаяв патенте «регулировка усилия трогания и намагничивающей силы срабатывания электромагнита…» создаваемые постоянным магнитом в рабочем воздушном зазоре, изменением суммарного поперечного сечения (магнитного сопротивления) шунтов крайне не эффективна. А управление вышеупомянутыми параметрами только изменением количества шунтов является грубым дискретным управлением, не обеспечивающим достижения заданной чувствительности, и требует разборки-сборки электромагнита при каждом управляющем воздействии. Устройство не является универсальным, и применимо только в одностабильных, возвратно-поступательного движения электромагнитах. В конструкции электромагнита не оправданно использован постоянный магнит значительной толщины, с соотношением толщины к площади полюса один к тридцати (1/30), тем самым не эффективно используется объем магнита и дорогостоящие компоненты магнита. Длина шунта, ровна толщине магнита и формирует величину его магнитного сопротивления и управляющего, шунтирующего потока, увеличение длины шунта необходимо компенсировать увеличением его поперечного сечения, при этом, соответственно, увеличиваются габариты и масса устройства. Таким образом, при использовании постоянного магнита из высококоэрцитивного материала это устройство также не эффективно. Кроме того, как сказано выше, размещение шунта или связанных с ним конструктивных элементов снаружи, на периферии электромагнитной системы, в зонах уменьшения плотности силовых магнитных линий из-за значительного увеличения магнитного сопротивления, шунтирующей цепи и утечек, неэффективно и приводит к увеличению габаритов, веса шунта и всей магнитной системы. Тем самым, например, модернизация многочисленных типов серийных реле с применением новых высококоэрцитивных магнитов окажется не эффективной, а разработанные новые образцы изделий будут неконкурентоспособны.
Главным недостатком всех выше приведённых конструктивных решений и устройств является отсутствие универсальности, возможности их применения во всём разнообразии электромагнитных устройств: одно-, двух- и трехстабильных; с вращающимся, уравновешенным якорем или якорем клапанного типа; с якорем возвратно поступательного движения; с размещением на подвижном якоре постоянного магнита (активный якорь); с одним, двумя и более магнитами;с использованием различных электромагнитных схем, с одним, двумя, и более рабочими зазорами, в том числе приведенных в издании (см.В.З.Ройзен «Электромагнитные малогабаритные реле» Энергоатомиздат,1986, Ленинград, стр.18, 19). Единственным геометрически универсальным местом размещения шунтирующих элементов для любых конструкций электромагнитных систем с применением тонких, с высокой удельной энергией магнитов является место их размещения между полюсными наконечниками, ограниченное площадью его полюсов.
Техническим результатом заявляемых способа и устройства является возможность управления, предпочтительно, в сторону уменьшения, магнитным потоком, создаваемым постоянным высококоэрцитивным магнитом из закритичного материала с редкоземельными элементами, с большей эффективностью путем воздействия на магнитный поток постоянного магнита в месте наибольшей напряжённости магнитного поля, а также возможность плавно и/или с небольшим дискретным шагом управлять магнитным потоком, добиваясь достижения его величины, в наибольшей степени, соответствующей заданным номинальным параметрам электромагнитной системы, используемой в конкретной электромагнитной поляризованной системе, что обеспечивает точность и надежность срабатывания таких устройств в течение всего жизненного цикла изделий.
Этот технический результат достигается тем, что способ управления магнитным потоком, создаваемым постоянным магнитом путем формирования регулируемого управляющего магнитного потока величина которого достаточна для срабатывания системы, с помощью шунта, изготовленного из материала с высокой магнитной проницаемостью, и полюсных наконечников, проводящих создаваемый рабочий магнитный поток в немагнитный рабочий зазор с размещенным в неподвижным элементом, при пропускании тока в обмотке электромагнитной системы, образующей с постоянным магнитом поляризованную магнитную систему, В СООТВЕТСТВИИ С ЗАЯВЛЯЕМЫМ ИЗОБРЕТЕНИЕМ формируют параллельный рабочему магнитному потоку постоянного магнита регулируемый управляющий магнитный поток при пропускании тока в обмотке электромагнитной системы с постоянными предварительно сформированными параметрами, путем продвижения, по меньшей мере, одного шунта в направлении от одного полюса постоянного магнита к другому через соосные отверстия, предварительно выполненные в полюсных наконечниках, и через пространство между полюсными наконечниками, образованное предварительно выполненной выборкой материала постоянного магнита, причем, после достижения величины формируемого управляющего магнитного потока, достаточной для срабатывания системы, останавливают шунт и неподвижно закрепляют его в месте остановки
При этом выборку материала постоянного магнита могут выполнить в виде отверстия в магните, соответствующего по форме отверстиям в полюсных наконечниках.
При этом могут использовать шунт цилиндрической формы.
При этом продвижение шунта цилиндрической формы могут осуществлять вращением его вокруг оси по винтовой линии резьбы, нанесенной на стенки отверстия, выполненного также цилиндрическим, и на боковую поверхность шунта.
Вариантом способа управления является способ управления магнитным потоком, создаваемым постоянным магнитом путем формирования регулируемого управляющего магнитного потока величина которого достаточна для срабатывания системы, с помощью шунта, изготовленного из материала с высокой магнитной проницаемостью, и полюсных наконечников, проводящих создаваемый рабочий магнитный поток в немагнитный рабочий зазор с размещенным в нем подвижным элементом, при пропускании тока в обмотке электромагнитной системы, образующей с постоянным магнитом поляризованную магнитную систему, В СООТВЕТСТВИИ С ЗАЯВЛЯЕМЫМ ИЗОБРЕТЕНИЕМ формируют параллельный рабочему магнитному потоку постоянного магнита, выполненного из отдельных частей, регулируемый управляющий магнитный поток при пропускании тока в обмотке электромагнитной системы с постоянными предварительно сформированными параметрами, путем продвижения, по меньшей мере, одного шунта в направлении от одного полюса постоянного магнита к другому через соосные отверстия, предварительно выполненные в полюсных наконечниках, и через пространство между полюсными наконечниками, образованное разнесением в пространстве частей, из которых состоит магнит, причем, после достижения величины формируемого управляющего магнитного потока, достаточной для срабатывания системы, останавливают шунт и неподвижно закрепляют его в месте остановки
В соответствии с заявляемым способом, управляющий магнитный поток формируют в месте наибольшей напряженности магнитного поля, создаваемого постоянным магнитом в полюсных наконечниках, замыкая шунтом часть магнитного потока постепенным продвижением его в сквозном отверстии, выполненном в магните и в полюсных наконечниках, то есть там, где магнитное поле постоянного магнита имеет наибольшую напряженность. Чем глубже продвигаетсяшунт в отверстии, тем большая часть магнитного потока постоянного магнита замыкается. Управляющий магнитный поток Фш параллелен рабочему магнитному потоку Фрм и их величины соотносятся друг к другу как значения магнитных сопротивлений шунтирующей и рабочей цепи. При этом под влиянием формируемого управляющего потока происходит изменение рабочего магнитного потока в рабочем магнитном зазоре. Как только магнитный поток в рабочем зазоре достигает величины магнитного потока, соответствующего порогу срабатывания электромагнитной системы, произойдётизменение рабочего положения подвижного элемента - якоря, с уменьшениемрабочего зазора между якорем и полюсными наконечниками,и связанного с функциональным назначением способа действием,например, замыкание контакта,если электромагнитная система предназначена для коммутационного устройства. После этого останавливают перемещение шунта и закрепляют его неподвижно.
Вышеописанные приемы способа позволяют сформировать магнитный поток постоянного магнита, соответствующий минимально допустимому, при котором приведенная в соответствие с предварительно заданными параметрами электромагнитной системыполезная часть энергии магнита обеспечивает срабатывание в пределах поля допуска на параметр срабатывания. Излишняя часть потока, создаваемого первоначально магнитом с большей, чем это необходимо энергией, с учётом погрешностей, вносимых электромагнитом и механической частью электромагнитной системы, оказывается компенсированной управляющим воздействием, формируемым с помощью, по крайней мере, одного шунта.
Указанный технический результат достигается в электромагнитной поляризованной системе, включающей постоянный магнит, установленный между двумя полюсными наконечниками, проводящими рабочий поток в рабочийнемагнитный зазор, образованный наконечниками и подвижным элементом,размещенным между ними, а также электромагнитную систему с постоянными предварительно сформированными параметрами, включающуюмагнитопровод с размещенной на нем обмоткой, и шунт, из материала с высокой магнитной проницаемостью, причем, В СООТВЕТСТВИИ С ЗАЯВЛЯЕМЫМ ИЗОБРЕТЕНИЕМэлектромагнитная поляризованная система содержит,электромагнитную систему с постоянными предварительно сформированными параметрами, а также по меньшей мере, один шунт, установленный в сквозных соосных отверстиях, выполненных в полюсных наконечниках и в пространстве, образованном выборкой материала магнита, с возможностью поступательного перемещения в наконечниках в направлении от одного полюса постоянного магнита к другому и неподвижной фиксацией шунта после достижения рабочим магнитным потоком в устройстве порога срабатывания.
При этом в электромагнитной поляризованнойсистеме может быть установлена прокладка из немагнитного материала под шунт, размещенная на поверхности, по крайней мере, частично перекрывающей отверстие в одном из полюсных наконечников с возможностью прекращения перемещения шунта на расстояние от кромки входа в отверстие шунта до места положения шунта в отверстии, соответствующего положению, при котором происходит срабатывание системы
При этом шунт может быть выполнен цилиндрической формы.
При этом выборка может быть выполнена цилиндрической формы, соответствующей форме шунта.
При этом шунт может быть выполнен ступенчатой формы.
При этом боковая поверхность верхней части ступенчатого шунта и стенки отверстия могут быть выполнены с резьбой.
При этом шунт цилиндрической формы может быть выполнен ступенчатой формы, причем, боковая поверхность верхней части ступенчатого шунта и стенки отверстия выполнены с резьбой.
Вариантом электромагнитной поляризованной системы, является система включающая постоянный магнит, установленный между двумя полюсными наконечниками,проводящими рабочий поток в рабочий немагнитный зазор,образованный подвижным элементом,размещенным между ними, а также магнитопровод с размещенной на нем обмоткой и шунт, из материала с высокой магнитной проницаемостью, причем, В СООТВЕТСТВИИ С ИЗОБРЕТЕНИЕМ постоянный магнит выполнен состоящим из нескольких частей, а электромагнитная поляризованная система содержитэлектромагнитную систему с постоянными предварительно сформированными параметрами, а также по меньшей мере, один шунт, установленный в сквозных соосных отверстиях, выполненных в полюсных наконечниках и в пространстве, ограниченном частями составного магнита,причем, шунт установлен с возможностью поступательного перемещения в направлении от одного полюса постоянного магнита к другому и фиксации его после достижения рабочим магнитным потоком порога срабатывания.
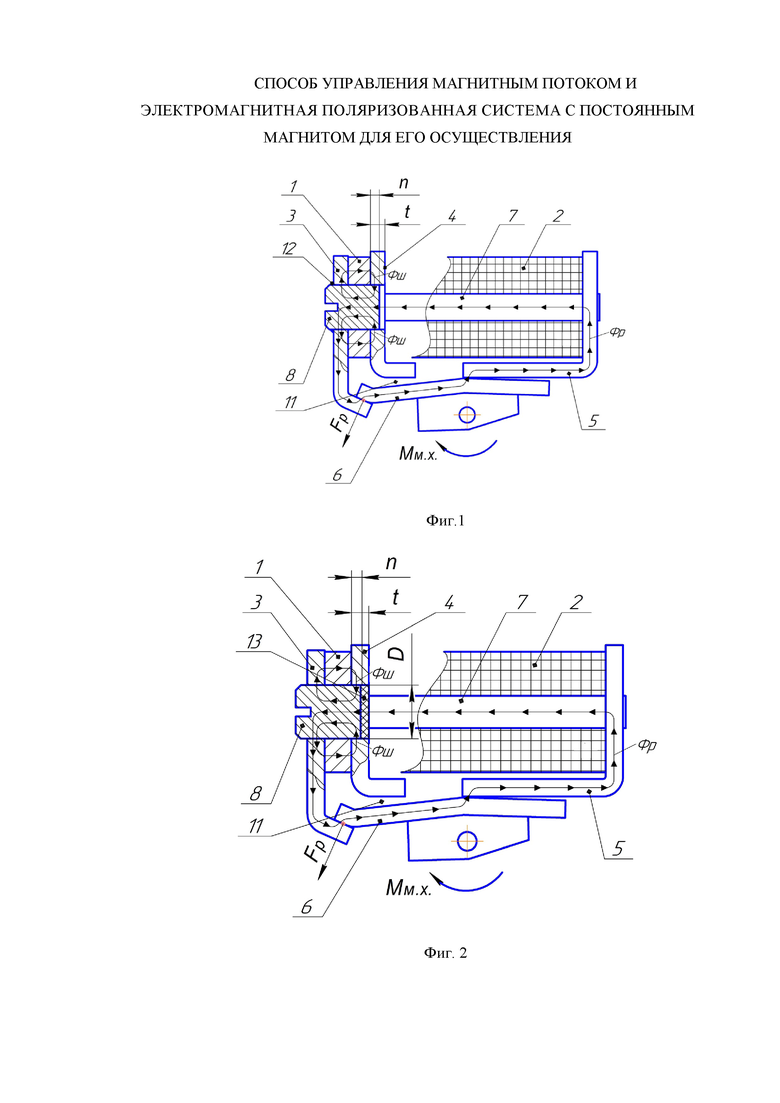
Способ и устройство поясняются рисунками на фиг. 1, 2, 3, 4, 5, 6, 7, где: 1–постоянный магнит, 2 – обмоткаэлектромагнитной системы с постоянными предварительно сформированными параметрами, 3,4,5 – полюсные наконечники, 6 – подвижный элемент, например, якорь, 7- сердечникэлектромагнитной системы с постоянными предварительно сформированными параметрами, 8 - шунт цилиндрический, который может быть выполнен с резьбой 9, 10 –прокладка немагнитная, 11, 12 –рабочие зазоры, 13– средство фиксации.
Устройство на фиг. 1 содержит постоянный магнит 1, полюсные наконечники 3, 4, между которыми он установлен, и которые являютсяпроводниками рабочего потокаФрм, созданного постоянным магнитом, в замкнутом рабочем немагнитном зазоре 12, образованном подвижным элементом магнитопровода 6, например, якорем 6.Электромагнитная система, содержащаяся в устройстве включает обмотку 2, размещенную на сердечнике 7 между полюсными наконечниками 4 и 5. Полюсный наконечник 4 – является общим для постоянного магнита и электромагнита. В постоянном магните 1 и полюсных наконечниках 3, 4 выполнены соосные отверстия, в которых установлен с возможностью перемещения шунт 8 в направлении от одного полюсного наконечника к другому. Шунт перемещают поступательно в отверстиях в направлении от одного полюса постоянного магнита к другому и жестко фиксируют, как это показано позицией 13 на рис.1. после достижения рабочим магнитным потоком в устройстве порога срабатывания. После выявления в процессе предварительного испытания глубины (размер n) необходимого погруженияшунта 8 в отверстия наконечников и магнита,могут быть изготовлены для установки в устройство прокладки из немагнитного материала, которые устанавливают в отверстии полюсного наконечника 4, через которое проходит часть шунта.Эту прокладку устанавливают для ограничения перемещения шунта в отверстии, и фиксации на глубине, на которой шунт должен быть остановлен. Для этого изготавливают одну или несколько прокладок соответствующего размера,– изменяя при этом с их помощью глубину, размер n, в случае необходимости (рис.2).
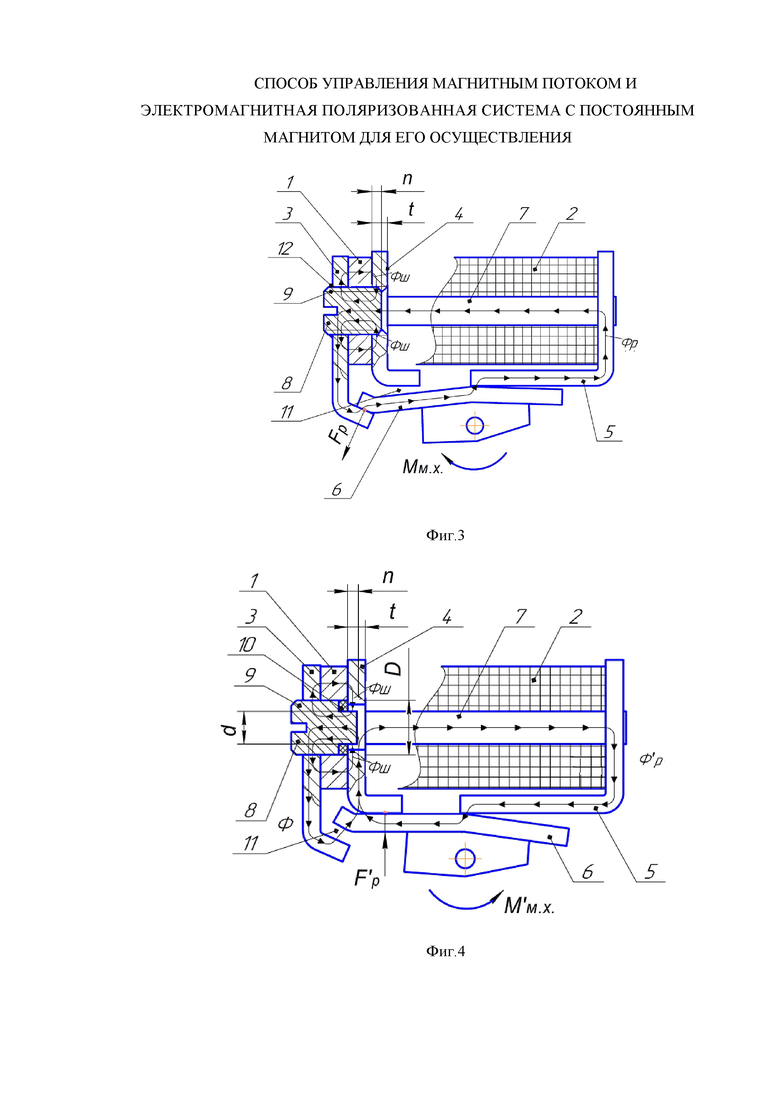
Шунт 8 и отверстия под шунт могут быть выполнены цилиндрическими, с резьбой в отверстиях и на боковой поверхности шунта (рис. 3). В этом случае шунт перемещают в отверстиях по винтовой линии резьбы, то есть очень медленно и постепенно, с соответствующей шагу резьбы степенью дискретности. Шунт резьбовой 8, размещён по центру прямоугольного магнита 1 в отверстиях под свободное продвижение резьбовой части шунта. Этот вариант выполнения позволяет с большой степенью точности установить шунт в положении, соответствующем порогу срабатывания. Лучшим материалом для шунта резьбового 8 является железоникелевый сплав 50Н высокой проницаемости (Пермаллой). При этом отсутствие антикоррозионного покрытия уменьшает и стабилизирует магнитное сопротивление его резьбового соединения с полюсным наконечником 3. Магнитный поток Фш создает усилие втягивающее шунт в отверстие D полюсного наконечника 4 и прижимает резьбу шунта к резьбе полюсного наконечника 3 без зазора, возникающее при этом усилие трения в резьбе препятствует произвольному, случайному повороту шунта.
Под верхнюю часть шунта ступенчатой формы также может быть установлена прокладка из немагнитного материала (рис.4). Самые тонкие шайбы изготавливаются из фольги толщиной от 0,05мм, что будет соответствовать повороту шунта резьбового 8 с шагом резьбы 0,5мм на угол 36 градусов. Такой вариант применяется в системах с низкой точностью или в качестве второго, вспомогательного шунта при увеличенных допусках на энергию постоянных магнитов.
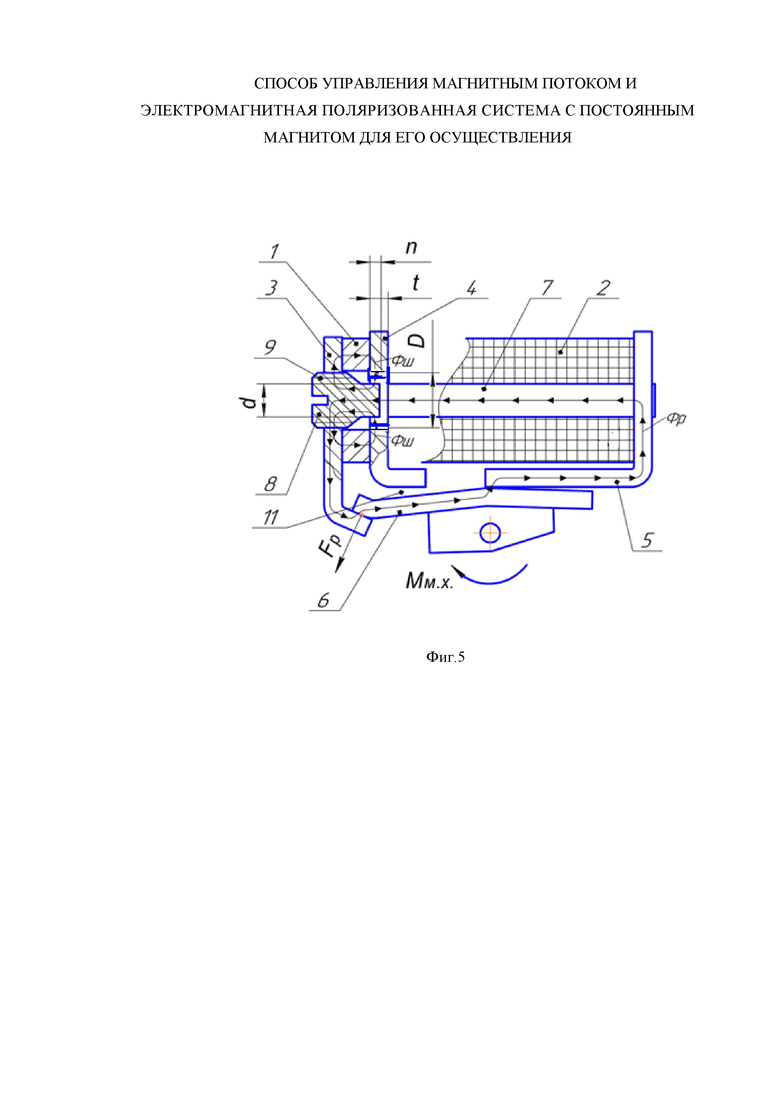
Кроме того, шунт может быть выполнен ступенчатой цилиндрической формы, с резьбой на ступени шунта, имеющей больший диаметр (рис. 5). В этом случае немагнитный зазор междуцилиндрической поверхностью шунта диаметром d и стенками отверстия D в полюсном наконечнике 4, равный величине (D-d)/2 и длиной n,влияет на величину шунтируемого потока Фш. При неизменном диаметре отверстия- D установка шунта ступенчатой формы с уменьшенным диаметром цилиндрической части d, увеличивает зазор и его сопротивление, тем самым уменьшается диапазон его возможного изменения при продвижении шунта на всю толщину -t полюсного наконечника 4, но при этом повышается точность изменения сопротивления на зафиксированной длине –n. Соответственно при уменьшении зазора (D-d)/2 до минимума (по скользящей посадке) сопротивление снижается, а шунтируемый поток Фш при продвижении шунта на всю длину отверстия в полюсном наконечнике t увеличивается до максимальной величины, которая компенсирует излишнюю энергию магнита, значение которой устанавливается по установленному поставщиком полю допуска. После окончания процесса управления и контроля параметров положение шунта фиксируется неподвижным соединением (сваркой, пайкой, клеем или деформацией).Этот вариант выполнения является предпочтительным, так как позволяет с наибольшей степенью точности установить шунт в положении, соответствующем порогу срабатывания, одновременно выбрать оптимальную чувствительность и диапазон управления рабочим магнитным потоком в зависимости от качества магнита или партии магнитов, изменяя размеры шунта.
Лучшим материалом для шунта резьбового 8 является железоникелевый сплав 50Н высокой проницаемости (Пермаллой). При этом отсутствие антикоррозионного покрытия уменьшает и стабилизирует магнитное сопротивление его резьбового соединения с полюсным наконечником 3. Магнитный поток Фш создает усилие, втягивающее шунт в отверстие D полюсного наконечника 4, и прижимает резьбу шунта к резьбе полюсного наконечника 3 без зазора, возникающее при этом усилие трения в резьбе препятствует произвольному, случайному повороту шунта.
При отсутствии тока в обмотке управления 2магнитный поток – Фрм, создаваемый постоянным магнитом 1, являющимся аккумулятором магнитной энергии, протекает по полюсному наконечнику 3 от северного полюса постоянного магнита 1 через весь магнитопровод к южному полюсу, через рабочий зазор 12, образованный якорем 6, который оказывается замкнутым, притянутым к полюсному наконечнику с минимальной величиной рабочего зазора, с усилием – Fр.
Протеканием тока в обмотке 2, величина которого задана и равна рабочему значению, задается величина магнитного потока управления Фру см. Фиг.4.На обмотку 2 подаётся заданное, минимально допустимое напряжение (ток) срабатывания системы, возникшая магнитодвижущая сила создает рабочий управляющий магнитный поток Фру, при срабатывании системы под его действием, якорь 6 поворачивается в положение см. Фиг.4,и замыкает рабочий зазор 11, это означает, что энергия магнита имеет минимально допустимое значение. Если в процессе контроля система срабатывает в установленных пределах для параметра электромагнита, с заданным технологическим запасом, шунт не устанавливают, работа по управлению завершена. В противном случаи шунт 8 заворачивают на минимальную глубину и подают на обмотку 2 номинальное напряжение срабатывания системы. Плавнопродвигаютчасть шунта 8 в отверстие полюсного наконечника 4 до глубины n, при которой происходит поворот якоря, срабатывание системы. При снятии напряжения с обмотки якорь возвращается в исходное положение. После технологической паузы, необходимой для температурной стабилизации системы, плавно повышают напряжение на обмотке 2 системы до момента срабатывания см. Фиг.4. При соответствии норме условий срабатывания проверяют напряжение (ток) удержания и/или отпускания, для чего плавно снижают напряжение до нормируемого значения удержания, при преждевременном срабатывании системы шунт 8 выворачивают, уменьшая размер-n на минимальную величину, сохраняющую условия срабатывания. Таким же образом, многократно измеряя параметры и изменяя положения шунта по размеру n на дискретно малые величины, добиваются соответствия всех трёх параметров установленным нормам. Состояние поляризованной электромагнитной системы и изменение магнитных потоков в процессе управления системой демонстрируется на рисунках с изображением стрелками путей магнитных потоков. На Фиг.1, также как и на Фиг.2,3,5,6, показано стабильное положение якоря 6 на который действует Fр - сила притяжения к полюсному наконечнику 3 созданная магнитным потоком Фрм, проходящим от северного полюса магнита N через полюсный наконечник 3, замкнутый рабочий зазор 12, якорь 6, полюсный наконечник 5, сердечник катушки 7, полюсный наконечник 4 к южному полюсу S. Крутящий момент силы Fр больше крутящего момента механической характеристики Ммх для обеспечения устойчивости к внешним механическим воздействиям. При подаче на обмотку 2 напряжения срабатывания и продвижении шунта 8на глубину n возникший магнитный поток Фру действует встречно магнитному потоку Фрм постоянного магнита уменьшает силу Fр и создает в зазоре 11 начальную величину силы F. Под действием этой силы и крутящего момента Ммх якорь начинает своё вращение, с нарастанием силы F при уменьшении зазора 11 преодолевается возникающий крутящий момент Ммх* (рис.4) и замыкается зазор 11, размыкается зазор 12, система принимает нестабильное положение, см. Фиг.4, при снятии с обмотки напряжения якорь должен вернуться в исходное положение см. Фиг.1. Магнитный поток Фру замыкается в цепи электромагнита, состоящей из полюсного наконечника 4, замкнутого рабочего зазора 11, якоря 6, полюсного наконечника 5 и сердечника катушки 7. В создании силы F кроме магнитного потока Фру участвует небольшая часть магнитного потока Ф постоянного магнита проходящего через разомкнутый зазор 21, который при снижении на обмотке 2 напряжения будет препятствовать возврату якоря 6 в исходное состояние и/или занижать параметр отпускания.
На фигурах рисунковзазор между шунтами 8 и стенками отверстия в полюсном наконечнике 4 равный (D-d)/2 вместе с его длинной-n задаёт величину шунтирующего потока Фш, для наглядности и простановки размеров на рисунках он утрированно увеличен. Фактически, в соответствии с данными, приведенными для расчета магнитного сопротивления зазора по методике, описанной издания В. З. Ройзен. «Электромагнитные малогабаритные реле». Энергоатомиздат, 1986, Ленинград, стр.40-50 величина зазора равна от нескольких микрон до десятой доли миллиметра в большинстве используемых электромагнитных схем и массогабаритных характеристик устройств. Исходя из этого, поля допусков на размеры отверстия- D в полюсном наконечнике 4 и цилиндрической поверхности шунта -d должны быть не выше 6 квалитета. При неизменном диаметре отверстия- D установка шунта с уменьшенным диаметром-d увеличивает зазор и его сопротивление, тем самым уменьшается диапазон его возможного изменения при продвижении шунта на всю толщину-t полюсного наконечника 4, но при этом повышается точность изменения сопротивления на фиксированной длине –n. Соответственно при уменьшении зазора (D-d)/2 до минимума (в соответствии со скользящей посадкой) сопротивление снижается, а шунтирующий поток Фш при продвижении шунта на всю толщину – t(n=t) увеличивается до максимальной величины, которая компенсирует излишнюю энергию магнита с ее верхним значением по установленному поставщиком полю допуска.
Лучшим материалом для шунта резьбового 8 является железоникелевый сплав 50Н высокой проницаемости (Пермаллой). При этом отсутствие антикоррозионного покрытия уменьшает и стабилизирует магнитное сопротивление его резьбового соединения с полюсным наконечником 3. Магнитный поток Фш создает усилие втягивающее шунт в отверстие D полюсного наконечника 4 и прижимает резьбу шунта к резьбе полюсного наконечника 3 без зазора, возникающее при этом усилие трения в резьбе препятствует произвольному, случайному повороту шунта. После окончания процесса управления и контроля параметров положение шунта фиксируется неподвижным соединением (сваркой, пайкой, клеем или деформацией). Процесс управления магнитным потоком (алгоритм управления) в поляризованной электромагнитной системе начинается с контроля свойств постоянного магнита установленного в ней. Как было указано выше электромагнитная система имеет заданные характеристики (с определённым крутящим моментом Ммх и Ммх* в предельных положениях подвижного элемента - якоря) и управляющим регулирующим магнитным потоком добиваются соответствия этой системе высококоэрцитивного магнита. 6 на Фиг.1 и Фиг.4. На обмотку 2 подаётся заданное, минимально допустимое напряжение (ток) срабатывания системы, возникшая магнитодвижущая сила создает магнитный поток Фр*, при срабатывании системы под его действием, подвижный элемент (якорь) 6 поворачивается в положение см. Фиг.4, это означает, что энергия магнита имеет минимально допустимое значение. При отсутствии срабатывания напряжение в обмотке повышают до срабатывания системы. Величина измеренного напряжения срабатывания не должна превышать установленного значения для максимально допустимой энергии магнита. Методика входного контроля свойств постоянного магнита согласовывается с поставщиком. Если в процессе контроля система срабатывает в установленных пределах для параметра электромагнита, с заданным технологическим запасом, шунт не устанавливают, работа по управлению завершена. В противном случаи шунт 8 заворачивают на минимальную глубину и подают на обмотку 2 номинальное напряжение срабатывания системы. Плавным вращением цилиндрическая часть шунта 8 продвигается в отверстие полюсного наконечника 4 до положения размера- n, при котором происходит поворот якоря, срабатывание системы. При снятии напряжения с обмотки якорь возвращается в исходное положение. После технологической паузы, необходимой для температурной стабилизации системы, плавно повышают напряжение на обмотке 2 системы до момента срабатывания см. Фиг.4. При соответствии норме условий срабатывания проверяют напряжение (ток) удержания и/или отпускания, для чего плавно снижают напряжение до нормируемого значения удержания, при преждевременном срабатывании системы шунт 8 выворачивают, уменьшая размер – n на минимальную величину, сохраняющую условия срабатывания. Таким же образом, многократно измеряя параметры и изменяя положения шунта по размеру – n на дискретно малые величины, добиваются соответствия всех трёх параметров установленным нормам. Состояние поляризованной электромагнитной системы и изменение магнитных потоковв процесс управления системой демонстрируется Фиг.1 и 4 с изображением стрелками путей магнитных потоков. На Фиг.1 показано стабильное положение якоря 6 на который действует Fр - сила притяжения к полюсному наконечнику 3 созданная магнитным потоком Фрм, проходящим от северного полюса магнита N через полюсный наконечник 3, замкнутый рабочий зазор 21, якорь 6, полюсный наконечник 5, сердечник катушки 7, полюсный наконечник 4 к южному полюсу S. Крутящий момент силы Fр больше крутящего момента механической характеристики Ммх для обеспечения устойчивости к внешним механическим воздействиям. При подаче на обмотку 2 напряжения срабатывания и продвижении шунта 8 в положение с размером –n возникший магнитный поток Фру действует встречно магнитному потоку Фрм постоянного магнита уменьшает силу Fр и создает в разомкнутом зазоре 11 начальную величину силы F. Под действием этой силы и крутящего момента Ммх якорь начинает своё вращение, с нарастанием силы F при уменьшении зазора 11 преодолевается возникающий крутящий момент Ммх* и замыкается зазор 11, система принимает нестабильное положение см. Фиг.4, при снятии с обмотки напряжения якорь должен вернуться в исходное положение см. Фиг.1. Магнитный поток Фру замыкается в цепи электромагнита, состоящей изполюсного наконечника 4, замкнутого рабочего зазора 11, якоря 6, полюсного наконечника 5 и сердечника катушки 7. В создании силы F кроме магнитного потока Фру участвует небольшая часть магнитного потока Ф постоянного магнита проходящего через разомкнутый зазор 21, который при снижении на обмотке 2 напряжения будет препятствовать возврату якоря 6 в исходное состояние и/или занижать параметр отпускания. На Фиг.2 представлен вариант управления магнитным потоком Фр цилиндрическим шунтом с помощью немагнитной прокладки 10 таких прокладок может быть несколько. Самые тонкие шайбы изготавливаются из фольги толщиной от 0,05мм, что соответствует повороту шунта резьбового 8 с шагом резьбы 0,5мм на угол 36 градусов. Такой вариант применяется в системах с низкой точностью или в качестве второго, вспомогательного шунта при увеличенных допусках на энергию постоянных магнитов.
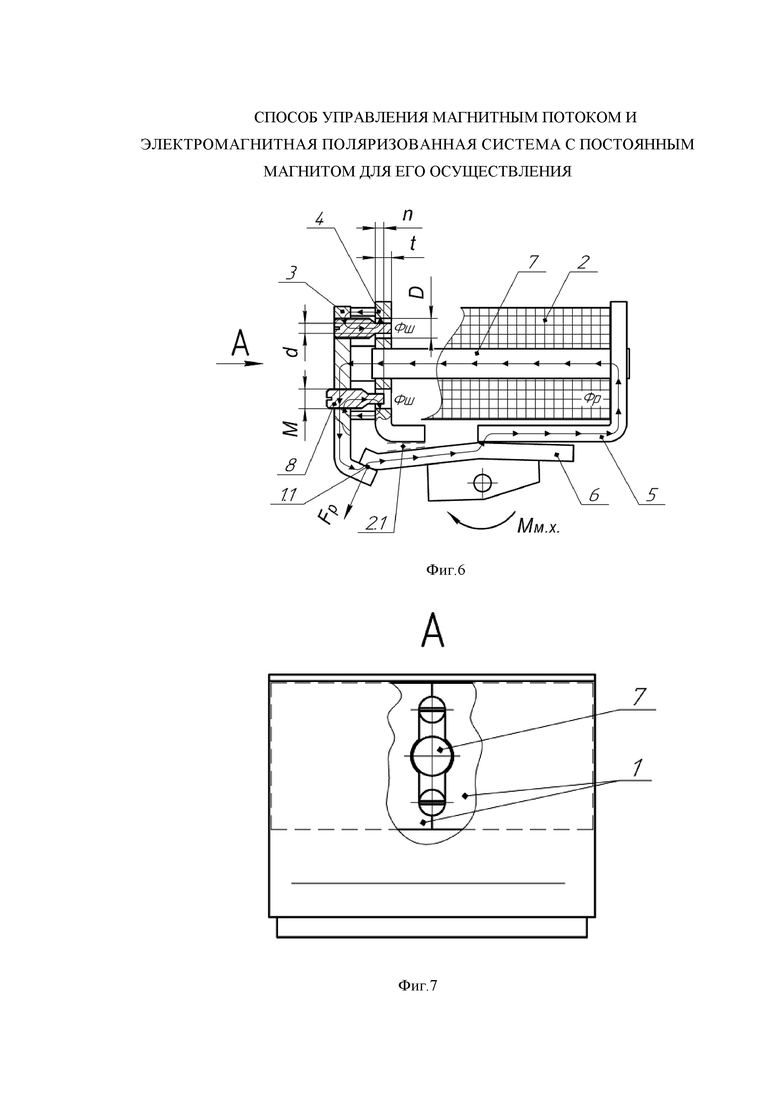
На Фиг.6,7 представлена система с постоянным магнитом 1 разделенным на две части по оси системы с образованием между ними минимального по площади пространства произвольной формы для размещения в нём двух шунтов 8 и замыкающей головки сердечника 7. Вариант управления магнитным потоком Фрм осуществляется двумя резьбовыми шунтами 8, каждый из них предназначен для компенсации одной трети (33,4%) избыточной энергии поля допуска постоянного магнита. Для компенсации сразу двух третей избыточной энергии (66,8%) применяется исполнение резьбового шунта 8 с увеличенным диаметром d до размера образующего скользящую посадку с отверстием D в полюсном наконечнике 3. Процесс управления магнитным потоком (алгоритм управления) втакой поляризованной электромагнитной системе начинается также с контроля свойств постоянного магнита установленного в ней. При отсутствии шунтов подают напряжение на обмотку 2 и плавно повышают его, начиная с минимального значения срабатывания до поворота якоря 6 и замыкания зазора 11. По определённому значению срабатывания системы определяют процент избыточной энергии магнита, необходимость постановки шунтов их количество и исполнение одного из них. Процесс управления магнитным потоком с применением одного шунта аналогичен управлению, описанному выше для Фиг.1 и 4. Вспомогательные шунты для предварительного шунтирования части избыточной энергии 33,4% или 66,8% сразу заворачиваются на всю глубину (размер n=t), а дальнейшее управлениемагнитным потоком другим шунтом (на Фиг.3 изображен ниже вспомогательного) осуществляется аналогично управлению, описанному выше для Фиг.1 и 4.Этот вариант управленияявляется более трудоёмким, но позволяет с наивысшей, прецизионной степенью точности, установить шунт в положении, соответствующем порогу срабатывания, одновременно выбрать оптимальную чувствительность и диапазон управления рабочим магнитным потоком в зависимости от качества магнита или партии магнитов, изменяя размеры шунта, и применятся в высокоточных приборах и системах измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Поляризованная электромагнитная система | 1985 |
|
SU1257722A1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| Электромагнитный поляризованный переключатель | 1978 |
|
SU741336A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2019 |
|
RU2704021C1 |
| ПОЛЯРИЗОВАННОЕ МАЛОГАБАРИТНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2018 |
|
RU2713475C1 |
| Электрическая машина постоянного тока | 1982 |
|
SU1119129A1 |
Изобретение относится к способу управления магнитным потоком. В способе используют постоянный магнит с полюсными наконечниками, проводящими рабочий поток в рабочие немагнитные зазоры, а также магнитный шунт, замыкающий разноименные полюса постоянного магнита. В момент пропускания тока по обмотке электромагнитной системы используют рабочий поток, установленный в проводящих полюсных наконечниках. Формируют параллельный регулируемый управляющий поток относительно направления рабочего магнитного потока, создаваемого постоянным магнитом, воздействуя на, по меньшей мере, один магнитный шунт, в условиях предварительно сформированных силовой и электромагнитной характеристик. При этом регулируют управляющий поток продвижением шунта в направлении от одного полюса постоянного магнита к другому в соосных отверстиях, выполненных в полюсных наконечниках. При достижении магнитным потоком величины порога срабатывания электромагнитной системы останавливают шунт и неподвижно закрепляют в месте остановки. Техническим результатом является повышение эффективности управления магнитным потоком, создаваемым постоянным высококоэрцитивным магнитом из закритичного материала с редкоземельными элементами, а также возможность управления магнитным потоком плавно и/или с небольшим дискретным шагом. 4 н. и 9 з.п. ф-лы, 7 ил.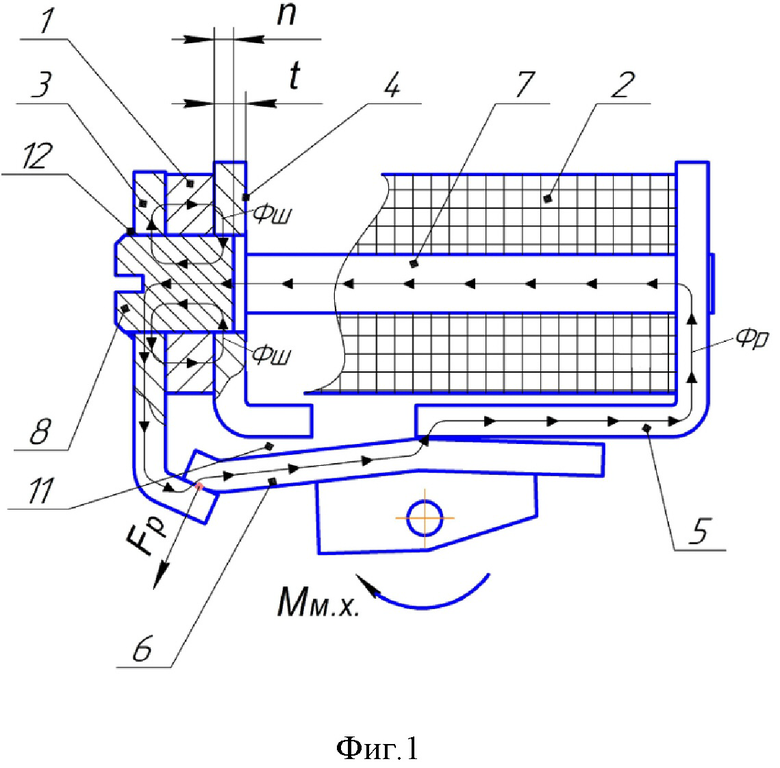
1. Способ управления магнитным потоком, создаваемым постоянным магнитом, путем формирования регулируемого управляющего магнитного потока, величина которого достаточна для срабатывания системы, с помощью шунта, изготовленного из материала с высокой магнитной проницаемостью, и полюсных наконечников, проводящих создаваемый рабочий магнитный поток в немагнитный рабочий зазор с размещенным в нем подвижным элементом, при пропускании тока в обмотке электромагнитной системы, образующей с постоянным магнитом поляризованную магнитную систему, отличающийся тем, что формируют параллельный рабочему магнитному потоку постоянного магнита регулируемый управляющий магнитный поток при пропускании тока в обмотке электромагнитной системы с постоянными предварительно сформированными параметрами путем продвижения, по меньшей мере, одного шунта в направлении от одного полюса постоянного магнита к другому через соосные отверстия, предварительно выполненные в полюсных наконечниках, и через пространство между полюсными наконечниками, образованное предварительно выполненной выборкой материала постоянного магнита, причем после достижения величины формируемого управляющего магнитного потока, достаточной для срабатывания системы, останавливают шунт и неподвижно закрепляют его в месте остановки.
2. Способ управления по п. 1, отличающийся тем, что выборку материала постоянного магнита выполняют в виде отверстия в магните, соответствующего по форме отверстиям в полюсных наконечниках.
3. Способ управления по п. 1, отличающийся тем, что используют шунт цилиндрической формы.
4. Способ управления по п. 1, отличающийся тем, что продвижение шунта цилиндрической формы осуществляют вращением его вокруг оси по винтовой линии резьбы, нанесенной на стенки отверстия, выполненного также цилиндрическим, и на боковую поверхность шунта.
5. Способ управления магнитным потоком, создаваемым постоянным магнитом, путем формирования регулируемого управляющего магнитного потока, величина которого достаточна для срабатывания системы, с помощью шунта, изготовленного из материала с высокой магнитной проницаемостью, и полюсных наконечников, проводящих создаваемый рабочий магнитный поток в немагнитный рабочий зазор с размещенным в нем подвижным элементом, при пропускании тока в обмотке электромагнитной системы, образующей с постоянным магнитом поляризованную магнитную систему, отличающийся тем, что формируют параллельный рабочему магнитному потоку постоянного магнита, выполненного из отдельных частей, регулируемый управляющий магнитный поток при пропускании тока в обмотке электромагнитной системы с постоянными предварительно сформированными параметрами путем продвижения, по меньшей мере, одного шунта в направлении от одного полюса постоянного магнита к другому через соосные отверстия, предварительно выполненные в полюсных наконечниках, и через пространство между полюсными наконечниками, образованное разнесением в пространстве частей, из которых состоит магнит, причем после достижения величины формируемого управляющего магнитного потока, достаточной для срабатывания системы, останавливают шунт и неподвижно закрепляют его в месте остановки.
6. Электромагнитная поляризованная система, включающая постоянный магнит, установленный между двумя полюсными наконечниками, проводящими рабочий поток в рабочий немагнитный зазор, образованный наконечниками и подвижным элементом, размещенным между ними, а также электромагнитную систему с постоянными предварительно сформированными параметрами, включающую магнитопровод с размещенной на нем обмоткой, и шунт из материала с высокой магнитной проницаемостью, отличающаяся тем, что электромагнитная поляризованная система содержит электромагнитную систему с постоянными предварительно сформированными параметрами, а также, по меньшей мере, один шунт, установленный в сквозных соосных отверстиях, выполненных в полюсных наконечниках и в пространстве, образованном выборкой материала магнита, с возможностью поступательного перемещения в наконечниках в направлении от одного полюса постоянного магнита к другому и неподвижной фиксации шунта после достижения рабочим магнитным потоком в устройстве порога срабатывания.
7. Система по п. 6, отличающаяся тем, что содержит прокладку из немагнитного материала под шунт, размещаемую на поверхности, по крайней мере, частично перекрывающей отверстие в одном из полюсных наконечников с возможностью прекращения перемещения шунта на расстоянии от кромки входа в отверстие шунта до места положения шунта в отверстии, соответствующего положению, при котором происходит срабатывание системы.
8. Система по п. 6, отличающаяся тем, что шунт выполнен цилиндрической формы.
9. Система по п. 6, отличающаяся тем, что выборка выполнена цилиндрической формы, соответствующей форме шунта.
10. Система по п. 6, отличающаяся тем, что шунт выполнен ступенчатой формы.
11. Система по п. 6, отличающаяся тем, что боковая поверхность верхней части ступенчатого шунта и стенки отверстия могут быть выполнены с резьбой.
12. Система по п. 6, отличающаяся тем, что шунт цилиндрической формы выполнен ступенчатой формы, причем боковая поверхность верхней части ступенчатого шунта и стенки отверстия выполнены с резьбой.
13. Электромагнитная поляризованная система, включающая постоянный магнит, установленный между двумя полюсными наконечниками, проводящими рабочий поток в рабочий немагнитный зазор, образованный подвижным элементом, размещенным между ними, а также магнитопровод с размещенной на нем обмоткой и шунт из материала с высокой магнитной проницаемостью, причем постоянный магнит выполнен состоящим из нескольких частей, а электромагнитная поляризованная система содержит электромагнитную систему с постоянными предварительно сформированными параметрами, а также, по меньшей мере, один шунт, установленный в сквозных соосных отверстиях, выполненных в полюсных наконечниках и в пространстве, ограниченном частями составного магнита, причем шунт установлен с возможностью поступательного перемещения в направлении от одного полюса постоянного магнита к другому и фиксации его после достижения рабочим магнитным потоком порога срабатывания.
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ, СОЗДАВАЕМЫМ ПОСТОЯННЫМ МАГНИТОМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2092922C1 |
| МАГНИТНОЕ ПОРОГОВОЕ УСТРОЙСТВО | 2012 |
|
RU2522891C2 |
| Способ пластики мышц сгибателей пальцев кисти | 1989 |
|
SU1717125A1 |
| KR 100966208 B1, 25.06.2010. | |||

