Изобретение относится к электротехнике и может быть применено в различных устройствах, в которых необходимо плавно регулировать рабочий магнитный поток, создаваемый магнитной системой, оснащенной постоянными магнитами, с минимально возможными энергетическими потерями, например в опорных узлах криогенных турбодетандеров и компрессоров, а также в опорных узлах холодильных компрессоров.
Известна управляемая магнитная система электропостоянного зажимного приспособления [1] содержащая постоянный магнит, магнитопровод, размещенные явновыраженные полюсы и обмотку управления, подключенную к регулирующему устройству, которая совместно с последним образует систему регулирования рабочего магнитного потока между разноименными полюсами магнитной системы.
Недостатками такой конструкции являются низкие энергетические показатели системы регулирования рабочего магнитного потока и большое тепловыделение в обмотке управления.
Известна управляемая магнитная система активной магнитной опоры криогенного компрессора [2] выбранная в качестве прототипа, содержащая постоянный магнит, магнитопровод, разноименные явновыраженные полюсы и обмотку управления, подключенную к регулирующему устройству, которая совместно с последним образует систему автоматического регулирования рабочего магнитного потока между разноименными полюсами магнитной системы.
Недостатками управляемой магнитной системы по прототипу являются низкие энергетические показатели системы регулирования рабочего магнитного потока и сравнительно большое тепловыделение в обмотке управления.
Целью изобретения является повышение энергетических показателей системы регулирования рабочего магнитного потока и снижение тепловыделения в обмотке управления.
Цель достигается тем, что в управляемой магнитной системе, содержащей по крайней мере один постоянный магнит, магнитопровод, разноименные явновыраженные полюсы и обмотку управления, подключенную к регулирующему устройству, которая совместно с последним образует систему автоматического регулирования рабочего магнитного потока между разноименными полюсами магнитной системы, разноименные явновыраженные полюсы замкнуты между собой накоротко магнитным шунтом, изготовленным из ферромагнитного изотропного материала с повышенной магнитной проницаемостью и имеющим в зависимости от конфигурации полюсов призматическую либо цилиндрическую форму, на который соленоидально либо тороидально намотана электрически изолированная от него обмотка управления таким образом, чтобы при протекании по ней тока от регулирующего устройства в магнитном шунте создавался поперечный по отношению к магнитному потоку со стороны постоянного (постоянных) магнита (магнитов) магнитный поток управления, с помощью которого регулируется магнитное сопротивление только магнитного шунта.
Управляемая магнитная система, содержащая разноименные явновыраженные полюсы и магнитный шунт призматической формы, отличающаяся тем, что магнитный шунт выполнен с шириной, большей ширины полюсов и с одинаково выступающими краями за их пределы, на сторонах магнитного шунта, обращенных к полюсам, выполнены полузакрытые пазы с электрически изолированными стенками, через пазы на магнитный шунт намотана соленоидальная обмотка управления, щели пазов заполнены ферромагнитной массой, выполняющей функцию магнитных мостиков на пути поперечного магнитного потока, создаваемого обмоткой управления.
Управляемая магнитная система, содержащая разноименные явновыраженные полюсы и магнитный шунт цилиндрической формы, отличающаяся тем, что на сторонах магнитного шунта, обращенных к полюсам, выполнены пазы с электрически изолированными стенками, через пазы на магнитный шунт намотана тороидальная обмотка управления.
Сопоставительный анализ с прототипом показывает, что заявляемая управляемая магнитная система отличается наличием между разноименными явновыраженными полюсами магнитного шунта, изготовленного из ферромагнитного изотропного материала с повышенной магнитной проницаемостью и имеющего в зависимости от конфигурации полюсов призматическую либо цилиндрическую форму, на который соленоидально либо тороидально намотана электрически изолированная от него обмотка управления, подключенная к регулирующему устройству, с помощью которой производится управление рабочим магнитным потоком между разноименными полюсами магнитной системы путем регулирования магнитного сопротивления только магнитного шунта. Таким образом, заявляемая управляемая магнитная система соответствует критериям изобретения "новизна" и "существенные отличия".
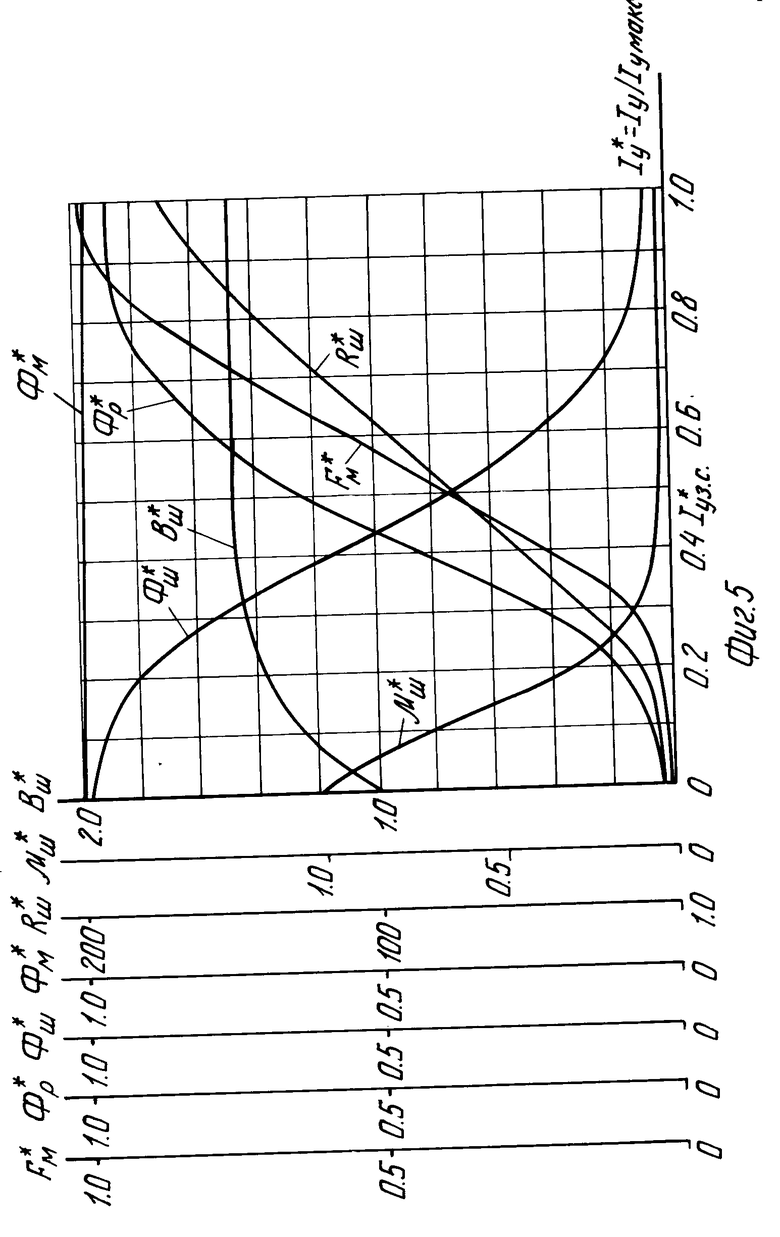
На фиг.1 показана управляемая магнитная система, содержащая разноименные явновыраженные полюсы и магнитный шунт призматической формы, входящая в состав активной радиальной магнитной опоры криогенного или холодильного компрессора; на фиг. 2 разрез А-А на фиг.1; на фиг.3 управляемая магнитная система, содержащая разноименные явновыраженные полюсы и магнитный шунт цилиндрической формы, входящая в состав активной осевой магнитной опоры криогенного или холодильного компрессора; на фиг.4 разрез Б-Б на фиг.3; на фиг.5 регулировочные характеристики управляемой магнитной системы, представленной на фиг.1.
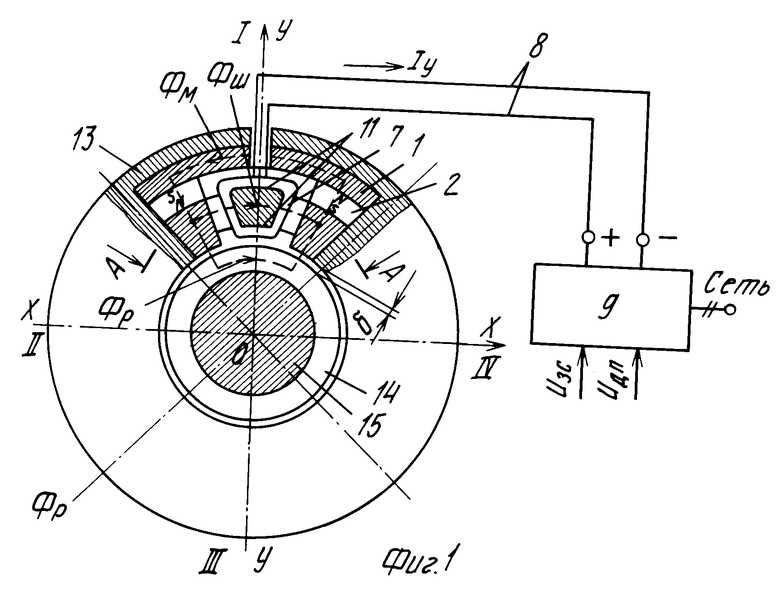
Предлагаемая управляемая магнитная система, представленная на фиг.1 и 2, входящая, например, в состав активной радиальной магнитной опоры криогенного или холодильного компрессора содержит магнитопровод 1, два высокоэнергетических постоянных магнита 2, разноименные явновыраженные полюсы 3 и 4 призматической формы, замкнутые между собой накоротко магнитным шунтом 5 призматической формы, изготовленным из ферромагнитного изотропного материала с повышенной магнитной проницаемостью, например из пермаллоя марки 50Н, на который через круглые полузакрытые пазы 6 намотана соленоидальная обмотка 7 управления, выводные провода 8 от которой подключены к регулирующему устройству 9. Обмотка 7 управления электрически изолирована от магнитного шунта 5 с помощью пазовой изоляции 10 и изоляционных прокладок 11.
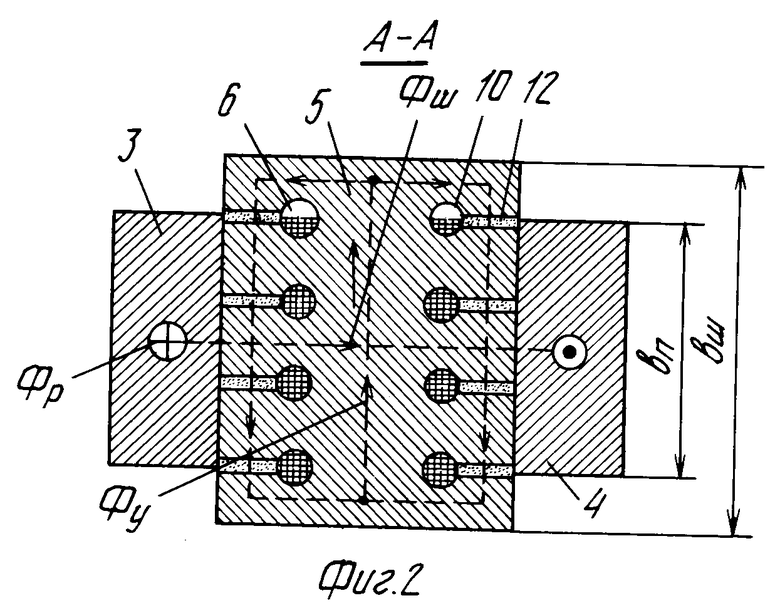
Магнитный шунт 5 (фиг.2) выполнен с шириной bш, большей ширины полюсов bп, и с одинаково выступающими краями за пределы полюсов 3 и 4. Для образования магнитных мостиков на пути поперечного магнитного потока, создаваемого при протекании по обмотке 7 управления управляющего тока Iу (фиг.1) со стороны регулирующего устройства 9, щели пазов 6 заполнены ферромагнитной массой 12, например в виде компаунда на основе порошкообразного карбонильного железа и эпоксидной смолы.
Управляемая магнитная система, представленная на фиг.1 и 2 (квадрант I), совместно с тремя другими аналогичными по конструкции управляемыми магнитными системами (на фиг.1 не показаны) размещена в немагнитном корпусе 13 и служит для создания и регулирования магнитного потока в рабочем зазоре δмежду явновыраженными полюсами 3, 4 и ферромагнитным шихтованным ротором 14, установленным на валу 15, с целью выведения вала компрессора за счет сил магнитного притяжения, воздействующих на ротор 14, в центральное положение в плоскости XOY и стабилизации этого положения вала по командам, поступающим от датчиков положения (на фиг.1 не показаны) в виде электрических сигналов uдп в регулирующее устройство 9.
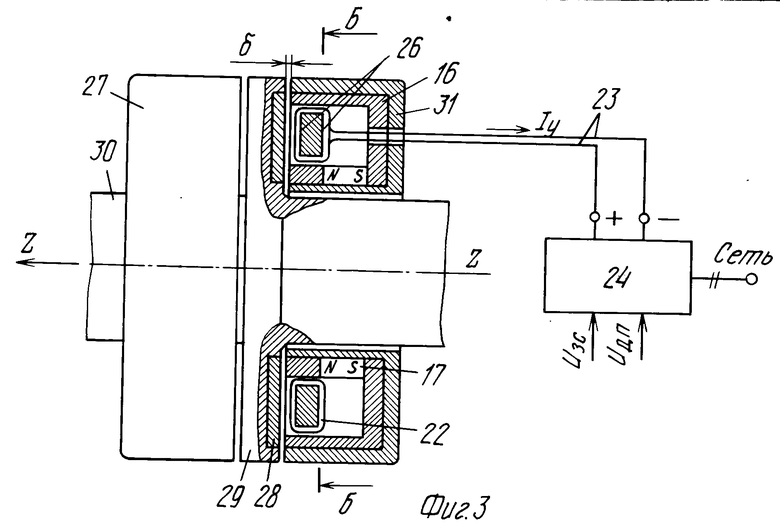
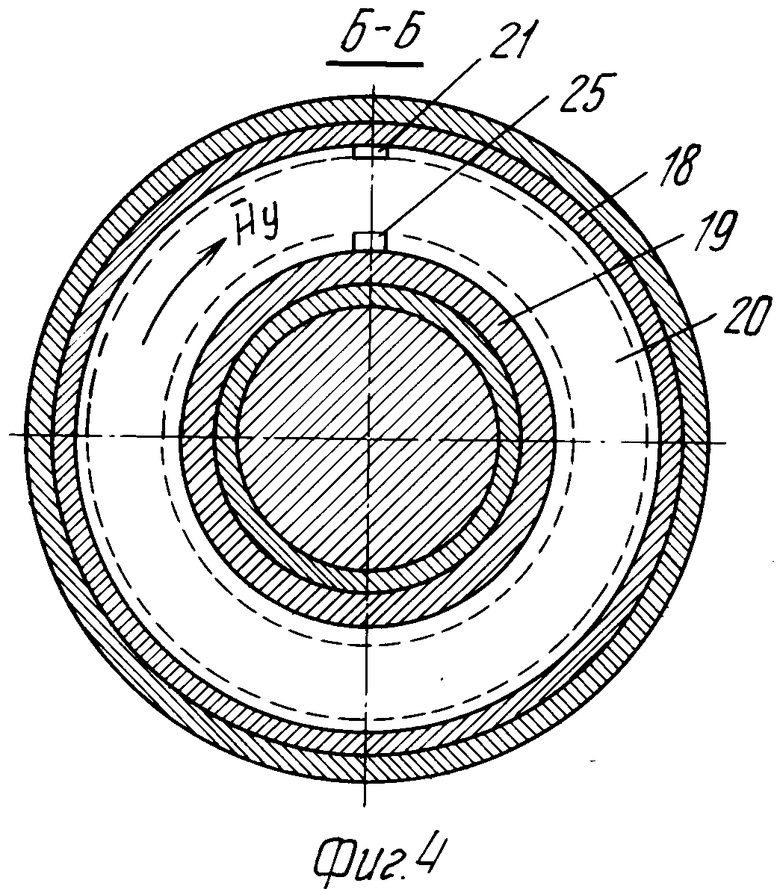
Представленная на фиг. 3 и 4 управляемая магнитная система, входящая, например, в состав активной осевой магнитной опоры криогенного или холодильного компрессора содержит магнитопровод 16, высокоэнергетический постоянный магнит 17, разноименные явновыраженные полюсы 18 и 19 цилиндрической формы, замкнутые между собой накоротко магнитным шунтом 20 цилиндрической формы, изготовленным из ферромагнитного изотропного материала с повышенной магнитной проницаемостью, например из пермаллоя марки 50Н, на который через открытые пазы 21 намотана тороидальная обмотка 22 управления, выводные провода 23 от которой подключены к регулирующему устройству 24 от магнитного шунта 20 с помощью пазовой изоляции 25 и изоляционных прокладок 26.
Управляемая магнитная система, представленная на фиг.3 и 4, совместно с другой аналогичной по конструкции управляемой магнитной системой 27 (на фиг. 3 ее разрез не показан) служит для создания и регулирования магнитного потока в рабочем зазоре δмежду явновыраженными полюсами 18, 19 и ферромагнитным кольцевым якорем 28, установленным на пяте 29 осевой опоры, изготовленной за одно целое с валом 30 из немагнитного материала, с целью выведения вала компрессора за счет сил магнитного притяжения, воздействующих на якорь 28, в фиксированное положение по оси Z, и стабилизации этого положения вала по командам, поступающим от датчиков положения (на фиг.3 не показаны) в виде электрических сигналов uдп в регулирующее устройство 24. Обе управляемые магнитные системы размещены в немагнитных корпусах 31.
По принципу действия представленные на фиг.1 и 3 управляемые магнитные системы не отличаются друг от друга. Поясним его на примере управляемой магнитной системы, представленной на фиг.1 и 2.
При отсутствии тока Iу в обмотке 7 управления магнитный поток Фм, создаваемый постоянными магнитами, практически полностью замыкается в контуре, проходящем через магнитопровод 1, левый постоянный магнит 2, полюс 3, магнитный шунт 5, полюс 4 и правый постоянный магнит 2, поскольку магнитное сопротивление шунта 5 из-за его высокой магнитной проницаемости μш при Iу 0 имеет во много раз меньшее значение, чем магнитное сопротивление участка магнитной цепи, проходящего через полюс 3, левый воздушный зазор δ, шихтованный ротор 14, правый воздушный зазор δ и полюс 4. Такое состояние магнитной системы близко к режиму короткого замыкания, при котором рабочий магнитный поток Фр равен нулю, магнитный поток Фш в шунте 5 равен магнитному потоку Фм и сила магнитного притяжения Fм, воздействующая со стороны магнитной системы по оси Y-Y на ротор 14, установленный на валу 15 компрессора, равна нулю.
При плавном увеличении тока Iy со стороны регулирующего устройства 9 от нуля до максимально возможного рабочего значения Iумакс в результате протекания поперечного магнитного потока управления Фу(фиг.2), создаваемого в магнитном шунте 5 обмоткой 7 управления, происходит плавное поднасыщение магнитного шунта 5 до предельного значения, при котором его магнитное сопротивление из-за значительного уменьшения магнитной проницаемости μш становится во много раз большим, чем магнитное сопротивление участка магнитной цепи, проходящего через полюс 3, левый воздушный зазор δ шихтованный ротор 14, правый воздушный зазор δи полюс 4. В этом случае магнитный поток Фшпрактически снижается до нуля, рабочий магнитный поток Фр достигает значения, равного магнитному потоку Фм, а сила магнитного притяжения Fм, воздействующая со стороны магнитной системы по оси Y-Y на ротор 14, установленный на валу 15, достигает максимального значения Fммакс.
Поведение магнитной системы при изменении управляющего тока Iу в пределах всего диапазон его регулирования и постоянстве рабочего зазора δ иллюстрируется фиг. 5, где помещены регулировочные характеристики предлагаемой магнитной системы, представляющие собой зависимости (в относительных единицах) магнитной индукции Вш*, магнитной проницаемости μш* магнитного сопротивления Rш* и магнитного потока Фш* в шунте 5 (фиг.2), рабочего магнитного потока Фр*, магнитного потока Фм*, развиваемого постоянными магнитами 2, и силы магнитного притяжения Fм*, воздействующей со стороны магнитной системы по оси Y-Y на ротор 14 (фиг.1), от управляющего тока I За базовые значения перечисленных характеристик магнитной системы приняты их значения при нулевом значении тока управления Iу*.
За базовые значения перечисленных характеристик магнитной системы приняты их значения при нулевом значении тока управления Iу*.
Для вывода невращающегося вала 15 компрессора в центральное положение в регулирующее устройство 9 (фиг.1) и в регулирующие устройства, принадлежащие трем другим магнитным системам, охватывающим вал 15 с ротором 14 в пределах квадрантов II, III и IV, вводятся задающие электрические сигналы uз.с, в результате чего токи Iу в обмотках управления всех четырех магнитных систем изменяются скачком от нуля до фиксированных значений (на фиг.5 это значение задающего тока Iу.з.с* принято равным 0,5), при которых под воздействием на ротор 14 сил магнитного притяжения по осям Y-Y и Х-Х он переходит в центральное положение в плоскости XOY.
В дальнейшем стабилизация центрального положения при вращении вала и воздействии на ротор компрессора различных внешних сил, в том числе сил, связанных с дисбалансом ротора, происходит автоматически по командам uдп, поступающим в регулирующие устройства всех четырех магнитных систем, расположенных в квадрантах I, II, III и IV, от датчиков положения, например, емкостного типа, следящих за положением вала по осям Y-Y и Х-Х.
В рассматриваемой магнитной системе, расположенной в I квадранте (фиг. 1), при смещении вала 15 вниз, либо вверх по оси Y-Y на входе регулирующего устройства 9 появляется соответствующий направлению смещения вала сигнал от датчика положения, в результате чего ток в обмотке 7 управления увеличивается, либо уменьшается по сравнению с его заданным значением Iу.з.с* (фиг.5) до тех пор, пока под действием возрастающей, либо убывающей силы магнитного притяжения Fм* вал компрессора не вернется в исходное центральное положение в плоскости XOY.
Благодаря наличию в рассматриваемой магнитной системе управляемого магнитного шунта, изготовленного из ферромагнитного изотропного материала с повышенной магнитной проницаемостью, существенно повышаются энергетические показатели системы автоматического регулирования рабочего магнитного потока и снижаются электрические потери в обмотке управления, переходящие в тепло, по сравнению с магнитной системой, выбранной в качестве прототипа. В последней управление осуществляется путем прямого регулирования рабочего магнитного потока с помощью дополнительного источника магнитодвижущей силы (МДС) в виде электромагнита, имеющего общий магнитопровод с основным источником МДС высокоэнергетическими постоянными магнитами, которому, из-за наличия в магнитной цепи рабочих воздушных зазоров δ и значительных по величине магнитных сопротивлений постоянных магнитов, присуща во много раз большая по сравнению с предлагаемой управляемой магнитной системой величина ампер-витков Iy˙Wy, что прямо следует из закона полного тока d
d Iу·Wу где
Iу·Wу где - напряженность управляющего магнитного поля.
- напряженность управляющего магнитного поля.
Для количественной оценки сравниваемых магнитных систем укажем, что в предлагаемой системе с магнитным шунтом цилиндрической формы (см. фиг.3 и 4), изготовленным, например, из пермаллоя марки 50Н, напряженность управляющего магнитного поля при протекании по обмотке управления максимального тока управления Iумакс не превышает значение Нумакс 85 А/м.
По своей сущности предлагаемая управляемая магнитная система является дальнейшим развитием и расширением области применения параметрического способа регулирования рабочего магнитного потока, создаваемого постоянными магнитами, используемого в [3] [4] [5] для управления вентильной электрической машиной, возбуждаемой высокоэнергетическими постоянными магнитами, расположенными на роторе.
От магнитных систем, используемых в устройствах [3] [4] [5] предлагаемая управляемая магнитная система отличается компактностью и значительно большим диапазоном регулирования рабочего магнитного потока, создаваемого постоянными магнитами всех типов, в том числе и литыми, которые в упомянутых устройствах неприменимы из-за их склонности к размагничиванию.
Помимо криогенной и холодильной техники, предлагаемая управляемая магнитная система может найти применение там, где необходимо создавать и регулировать рабочий магнитный поток при минимально возможном потреблении электроэнергии, например в прецизионных магнитных зажимных устройствах и приспособлениях, в подъемных машинах и механизмах взамен в них тяговых электромагнитов, в тормозных устройствах различных машин и механизмов, в коммутационной технике и других областях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ, СОЗДАВАЕМЫМ ПОСТОЯННЫМ МАГНИТОМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2092922C1 |
| Вентильный электропривод | 1990 |
|
SU1758788A1 |
| УПЛОТНЕНИЕ С АКТИВНЫМ ЭЛЕКТРОМАГНИТНЫМ РЕГУЛИРОВАНИЕМ ЗАЗОРА | 2012 |
|
RU2503865C1 |
| Бесконтактный регулируемый синхронный генератор | 1982 |
|
SU1123081A1 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| ВИБРАЦИОННЫЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2010 |
|
RU2439771C1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| Однофазный асинхронный двигатель с фазным ротором | 2024 |
|
RU2840896C1 |
| Путевой выключатель | 1985 |
|
SU1288778A1 |
Использование: в электротехнике, в устройствах, где необходимо плавно регулировать рабочий магнитный поток. Сущность изобретения: устройство содержит магнитопровод два высокоэнергетических постоянных магнита, разноименные явновыраженные полюса призматической формы, замкнутые между собой накоротко магнитным шунтом призматической формы, на который через полузакрытые пазы намотана соленоидальная обмотка управления, выводные провода от которой подключены к регулирующему устройству. Благодаря наличию в магнитной системе управляемого магнитного шунта повышаются энергетические показатели устройства и снижаются электрические потери в обмотке управления. 2 з.п. ф-лы, 5 ил.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент РФ N 2000642, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
