Изобретение относится к электроакустике.
Известен способ для генерирования стереофонических сигналов и устройство для его реализации по пат. США N 4706287, кл. H 04 R 5/00, 1987. В известном способе монофонический сигнал разделяют на сигналы первого и второго каналов, подают сигнал первого канала на первый громокоговоритель и подают сигнал второго канала после сдвига его по фазе в зависимости от частоты на второй громкоговоритель.
Наиболее близким аналогом объекта-способа изобретения является способ получения и локализации кажущегося источника звука по пат. Великобритании 2109658, кл. H 04 R 5/00, 1983, заключающийся в разделении электрического сигнала на соответствующие сигналы первого и второго каналов, подаче сигнала первого канала на первый громкоговоритель и подаче сигнала второго канала после изменения его по амплитуде и сдвига по фазе в зависимости от частоты на второй громкоговоритель.
Наиболее близким аналогом объекта-устрйоства является система получения и локализации кажущегося источника звука по пат. Великобритании 2109658, кл. H 04 R 5/00, 1983, содержащая источник электрического сигнала, выход которого связан с первым громкоговорителем и через второй блок частотнозависимого сдвига фазы и изменения амплитуды сигнала со вторым громкоговорителем.
Техническим результатом от использования изобретения является обеспечение возможности локализации кажущегося источника звука в любом месте трехмерного пространства вне зависимости от места расположения громкоговорителей.
В способе данный результат достигается за счет того, что производят одновременное независимое изменение амплитуд и сдвиг фаз подаваемых на первый и второй громкоговорители сигналов в зависимости от их частоты, поддерживают разность фаз и амплитуд сигналов первого и второго каналов в последовательных дискретных частотных полосах звукового диапазона, причем каждый последующий сдвиг фазы отличен от предыдущего.
В устройстве данный результат достигается за счет того, что между источником электрического сигнала и первым громкоговорителем включен первый блок частотнозависимого сдвига фазы и изменения амплитуды сигнала, причем первый и второй блоки имеют звуковой процессор.
На фиг.1 показан вид в плоскости слуховой геометрии для определения параметров местонахождения изображений; на фиг. 2 вид сбоку фиг.1; на фиг. 3 вид в плоскости слуховой геометрии для определения параметров местонахождения слушателя; на фиг. 4 вид сбоку фиг.3; на фиг. 5 6 виды в плоскости соответствующих ситуаций при прослушивании с соответствующими изменениями расположения громкоговорителей; на фиг. 7 таблица критических размеров для трех комнат прослушивания; на фиг. 8 вид в плоскости эксперимента по переносу изображения, выполненного в двух изолированных комнатах; на фиг. 9 блок-схема обработки; на фиг. 10 блок-схема системы; на фиг. 11 иллюстрация рабочей станции оператора; на фиг. 12 картинка аксонометрической компьютерной графики, использовавшаяся при контроле; на фиг. 13 три ортогональных вида компьютерной графики; на фиг. 14 схематичное представление образования фактических звуковых источников при помощи настоящего изобретения с показом вида в плоскости трех изолированных комнат; на фиг. 15 блок-схема оборудования для демонстрации настоящего изобретения; на фиг. 16 форма тестового сигнала, данная как напряжение относительно времени; на фиг. 17 приведены данные, представляющие функцию передачи; на фиг. 18 блок-схема системы определения места звукового изображения; на фиг. 19 - графические представления типичных функций передачи, используемых в процессорах звука фигуры 18; на фиг. 20 23 блок-схема цепи; на фиг. 24 - блок-схема дополнительных цепей.
Для определения условий, которые позволят однозначно описать обработку слухового изображения в соответствии с настоящим изобретением, на фиг. 1 4 показаны некоторые употребляемые размеры и углы.
Фиг. 1 представляет вид в плоскости положения прослушивания, где изображены левый 1 и правый 2 громкоговорители, слушатель 3 и позиция звукового изображения 4, которая кажется слушателю 3. Только для целей определения слушатель показан расположенным на линии 5, перпендикулярной линии 6, соединяющей громкоговорители 1 и 2 и проходящей через середину линии 5. Это положение будет именоваться эталонным положением слушателя, однако в данном изобретении слушатель не ограничен этой позицией. Из эталонного положения слушателя измеряют азимутный угол (a) изображения против часовой стрелки от линии 5 до линии 7 между слушателем 3 и положением изображения 4. Подобным образом определяют наклонную дальность (r) изображения как расстояние между слушателем 3 и позицией изображения 4. Эта дальность является реальной дальностью, измеренной в трехмерном пространстве, а не проекционной дальностью, измеренной на плоскости или другом ортогональном виде.
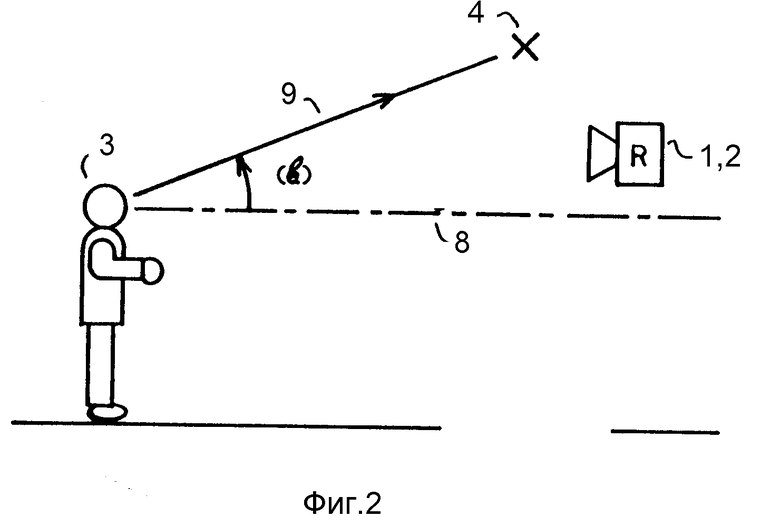
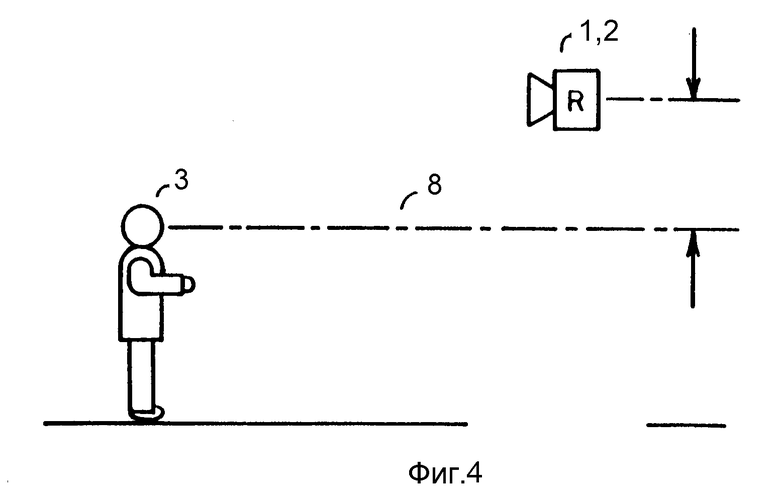
В настоящем изобретении существует возможность значительного отклонения изображений от плоскости слушателей. Соответствующим образом на фиг. 2 определяют угол возвышения (b) для изображения. Этот угол измеряют вверх от горизонтальной линии 8 через голову слушателя 3 до линии 9, соединяющей голову слушателя с позицией изображения 4. Следует отметить, что громкоговорители 1, 2 не обязательно лежат на линии 8.
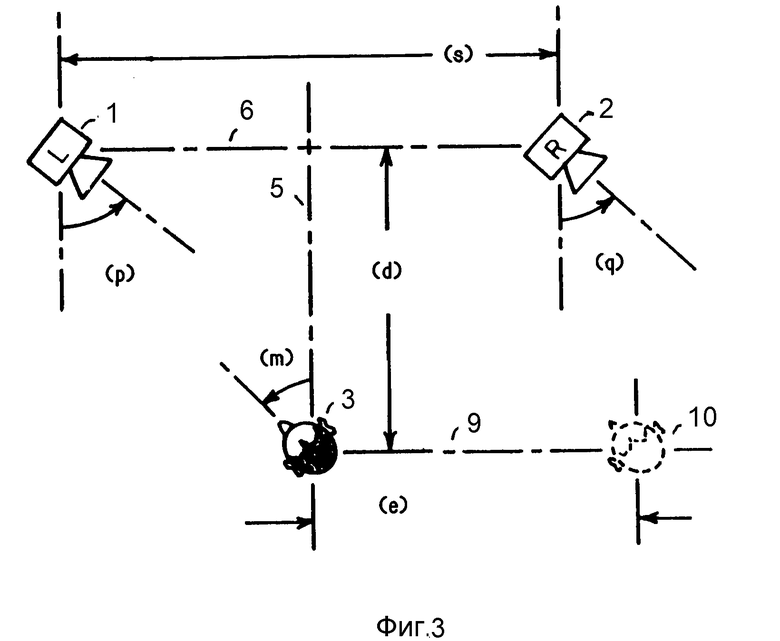
Определив позиционные параметры изображения по отношению к эталонной слуховой конфигурации, приступим к определению параметров для возможных вариаций в конфигурации прослушивания. Расстояние между громкоговорителями (S) (фиг. 3) измеряют вдоль линии 6, а расстояние до слушателя (d) по линии 5. В случае, когда слушатель находится параллельно линии 6 по линии 9 до позиции 10, мы определяем боковое смещение (e), измеренное вдоль линии 9. Для каждого громкоговорителя 1 и 2 определяем соответствующие азимутальные углы (p) и (q), измеряемые против часовой стрелки от линии, проходящей через громкоговорители 1, 2 перпендикулярно соединяющей их линии, по направлению к слушателю. Подобным образом для слушателя мы определяем азимутальный угол (m) против часовой стрелки от линии 5, в направлении, куда смотрит слушатель.
На фиг. 4 высоту громкоговорителя (h) измеряют вверх от горизонтальной линии 8 через голову слушателя 3 до вертикальной осевой линии громкоговорителя 2.
Определенные таким образом параметры позволяют неоднократно описать заданную геометрию. Например, позиция изображения может быть совершенно однозначно описана как (180,0,x) или (0,180,x).
В обычном стереофоническом воспроизведении изображение обязательно должно лежать вдоль линии 6 на фиг. 1, в то время как изображение, производимое настоящим изобретением, можно свободно поместить в любое место пространства: азимутный угол (a) может варьироваться от 0 до 360 градусов, а дальность (r) не ограничена расстояниями, соразмерными с (s) или (d). Изображение можно создать очень близко от слушателя на расстоянии небольшой части (d) или на удалении на расстоянии нескольких (d), оно одновременно может быть под любым азимутным углом (a) безотносительно к азимутному углу, стягиваемому громкоговорителями. Кроме того, настоящее изобретение способно поместить изображение под любым углом возвышения (b). Расстояние до слушателя (d) может варьироваться от 0,5 м и до 30 м и даже выходить за пределы этого диапазона, причем изображение явно статично в пространстве во время этого изменения.
Образование хорошего изображения было достигнуто при расстоянии между громкоговорителями от 0,2 м до 8 м с использованием тех же самых сигналов для управления громкоговорителями от всех расстановок. Азимутные углы у громкоговорителей (p) и (q) можно менять независимо в широком диапазоне без какого-либо воздействия на изображение.
Отличительной характеристикой изобретения является то, что умеренные изменения высоты громкоговорителей (h) не влияют на угол возвышения изображения (b), воспринимаемый слушателем. Это истинно как для положительных, так и для отрицательных значений (h), говоря другими словами, при установке громкоговорителей выше или ниже высоты головы слушателя.
Так как созданное изображение чрезвычайно реалистично, для слушателя естественно поворачиваться, чтобы "взглянуть" на него, то есть быть лицом к изображению. При этом изображение остается стабильным; азимутный угол слушателя (m) не оказывает заметного воздействия на пространственную позицию изображения для по крайней мере диапазона углом (m) от + 120 до -120 градусов. Впечатление локализованного звукового источника настолько сильно, что слушателям не представляет трудности "посмотреть" или указать на изображение; группа слушателей будет отмечать одну и ту же позицию изображения.
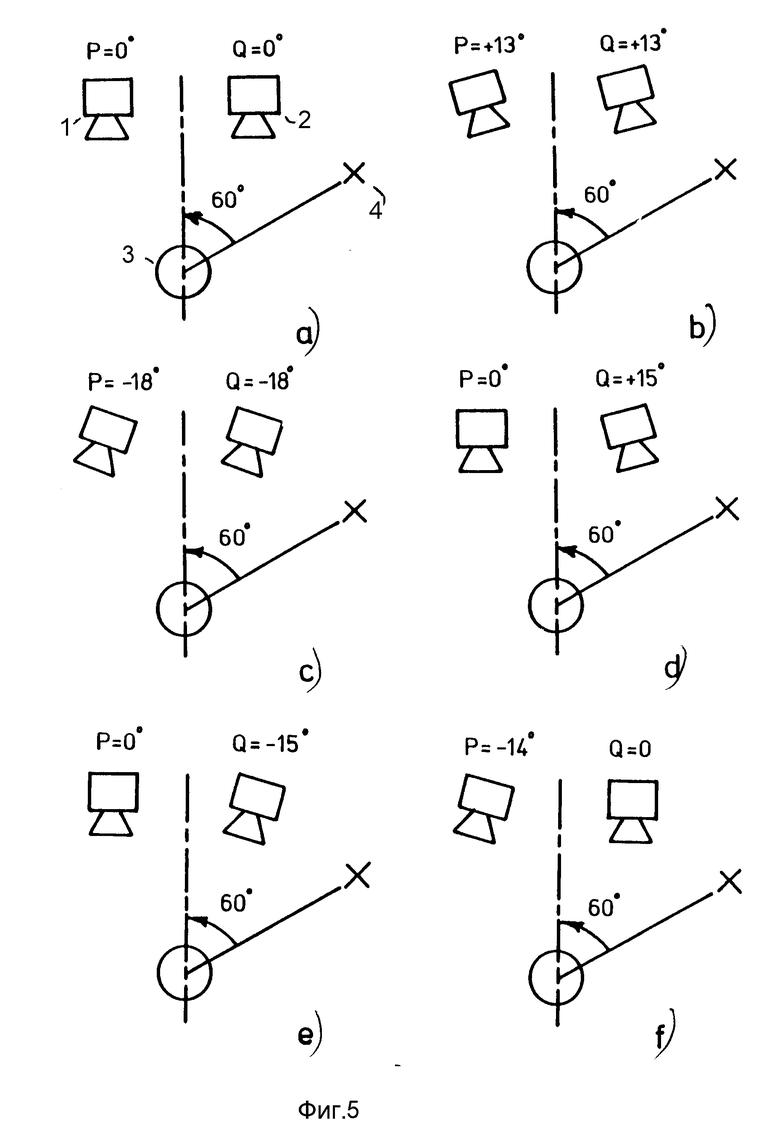
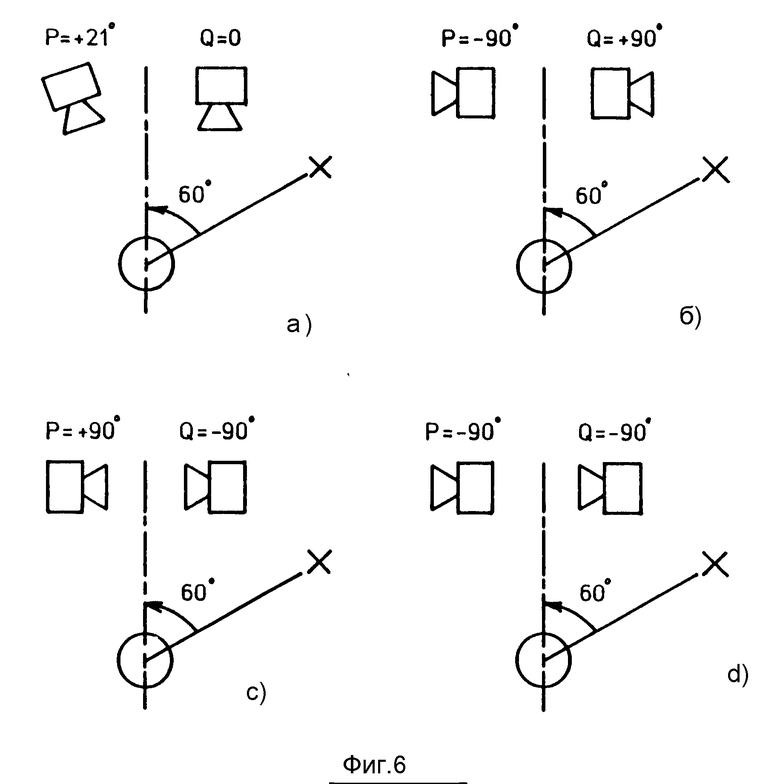
На фиг. 5 6 показан ряд из десяти геометрий прослушивания, в которых проходила проверка стабильности изображения. На фиг. 5 показан вид в плоскости геометрии прослушивания. Левый и правый громкоговорители 1 и 2 соответственно воспроизводили звук для слушателя 3, создавая звуковое изображение 4. Подфигуры 5 6 показывают различные варианты в ориентации громкоговорителей и в общем подобны подфигуре 5.
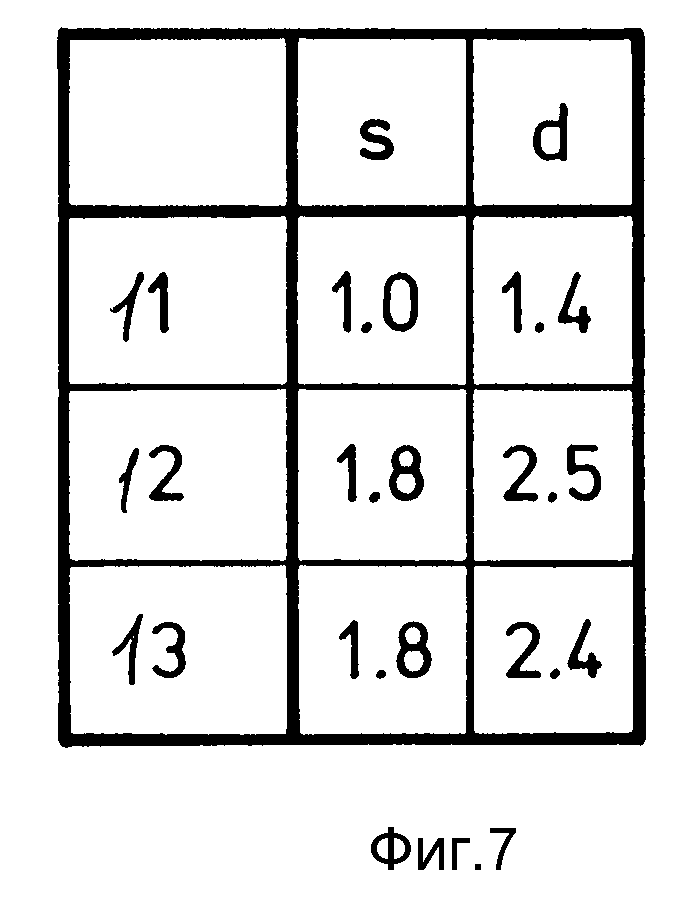
Все десять геометрий проверяли в трех разных прослушивающих комнатах с различными значениями расстояния расстановки громкоговорителей (s) и расстояния до слушателя (d). Комната 11 была небольшой студией управления, содержащей значительное количество оборудования, комната 12 была практически пустой записывающей студией большого размера, а комната 13 была небольшой экспериментальной комнатой со звукопоглощающим материалом на трех стенах.
Для каждой проверки слушателя просили дать ощущаемое положение изображения для двух состояний: при нулевом угле (m) головы слушателя и когда голова повернута в сторону к кажущейся позиции изображения. Каждую проверку повторяли с тремя различными слушателями. Таким образом, стабильность изображения проверяли в общей сложности на 180 конфигурациях. В каждой из этих 180 конфигураций использовали одни и те же входные сигналы для громкоговорителей. В каждом случае азимутный угол изображения (a) воспринимался как 60 градусов.
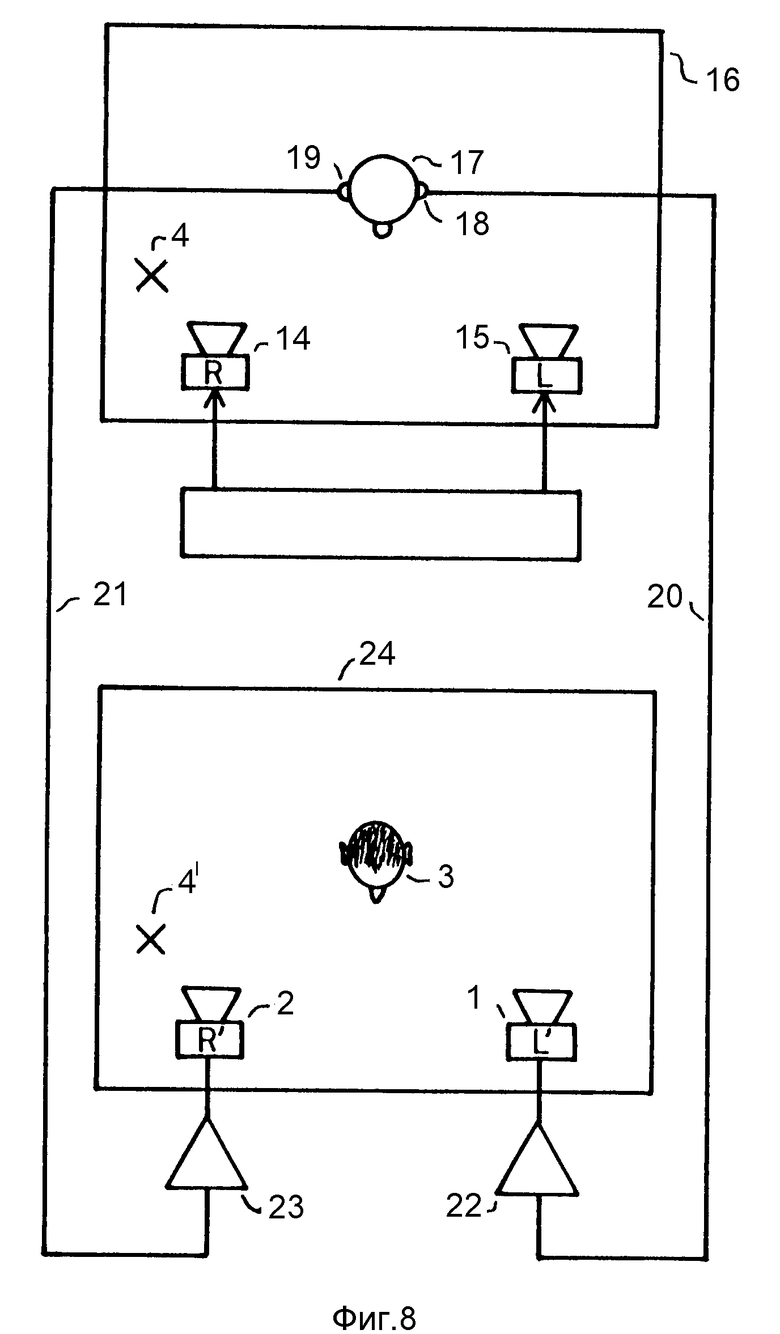
На фиг. 8 показан эксперимент по переносу изображения, в котором формируют сигналы, обрабатываемые в соответствии с настоящим изобретением и возбуждающие усилители 14 и 15 в первой комнате 16. Макет головы 17 имеет левый и правый микрофоны 18 и 19 в моделях ушей. Электрические сигналы на линиях 20 и 21, идущих от микрофонов 18, 19, усиливают по раздельности посредством усилителей 22 и 23, которые возбуждают левый и правый громкоговорители 1 и 2 соответственно во второй комнате 24. Слушатель 3, находящийся в этой второй комнате, которая акустически изолирована от первой, будет воспринимать отчетливое вторичное изображение 4', соответствующее изображению 4 в первой комнате.
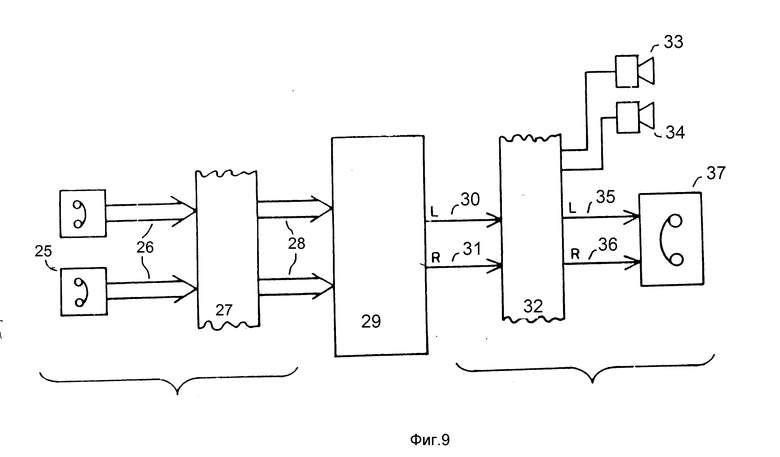
Пример взаимосвязи звукового процессора, соответствующего настоящему изобретению, с известными системами показан на фиг. 9 в которой один или несколько многодорожечных сигнальных источников 25, которыми могут быть устройства воспроизведения магнитной ленты, подают множество монофонических сигналов 26, получаемых от множества источников, на студийный пульт смешивания 27. Пульт может быть использован для модификации сигналов, например, посредством изменения уровней и балансируемого частотного содержания любым желаемым способом.
Множество модифицированных монофонических сигналов 28, создаваемых пультом 23 подключают ко входам системы обработки изображений 29 в соответствии с настоящим изобретением. В этой системе каждому входному каналу назначена позиция изображения, а для создания двухканальных сигналов из каждого одиночного входного сигнала 28 применяют обработку функций передачи. Все двухканальные сигналы смешивают для производства конечной пары сигналов 30, 31, которые затем могут быть возвращены на смешивающий пульт 32.
Двухканальные сигналы, создаваемые настоящим изобретением, в реальности не являются левым и правым стереосигналами, однако в таком подразумеваемом значении обеспечивается простое обозначение этих сигналов. Таким образом, когда все двухканальные сигналы смешены, все левые сигналы объединяют в один сигнал, и правые тоже. На практике пульт 27 и пульт 29 могут быть отдельными частями одного и того же пульта. Используя возможности пульта, можно подавать обработанные сигналы для возбуждения громкоговорителей 33, 34 в целях контроля. После любой требуемой модификации и установки уровня оригинальные стереосигналы 35 и 36 направляют на устройство оригинальной стереозаписи 37, которым может быть двухканальное устройство записи на магнитную ленту.
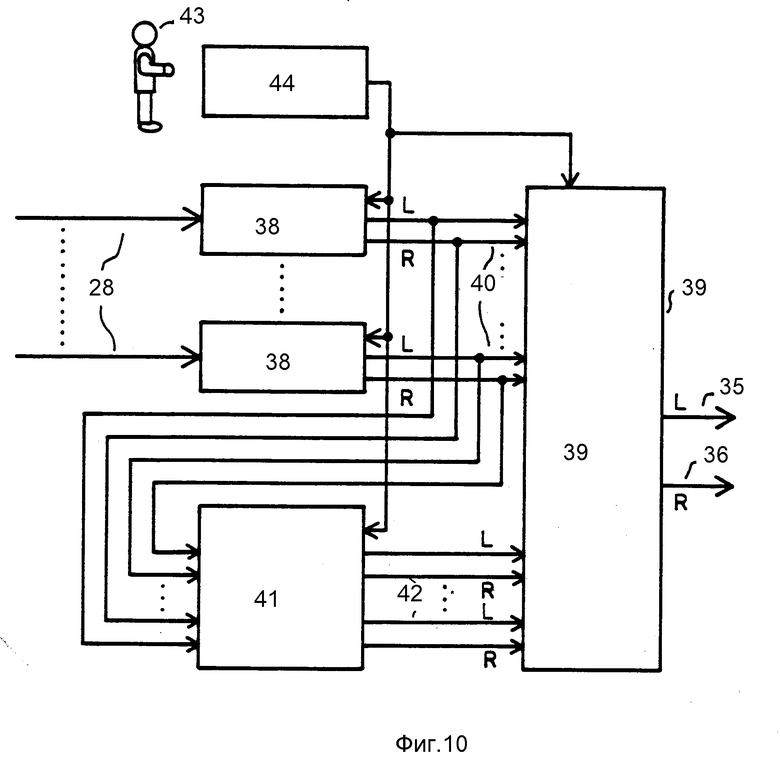
Подробно система обработки звуковых изображений 29 показана на фиг. 10, где каждый монофонический входной сигнал 28 подают на отдельный сигнальный процессор 38, каждый из которых работает независимо, не связывая звуковые сигналы. Каждый сигнальный процессор действует для создания двухканальных сигналов, имеющих дифференциальную фазу и амплитуду, которые настраивают на частотнозависимой базе. Ниже дано более подробное описание этих функций передачи. Функции передачи, которые можно описать в области времени как реальные импульсные характеристики или эквивалентно в частотной сфере как сложные частотные характеристики или амплитудно-фазовые характеристики, отличают только желаемую позицию изображения, в которую должен быть спроектирован входной сигнал.
На входы стереосмесителя 39 подают одну или несколько сигнальных пар 40, созданных сигнальными процессорами. Некоторые или все из них также можно подать на входы запоминающей системы 41. Эта система способна хранить полностью обработанные звуковые стереосигналы и одновременно выдавать их на выходах 42. Обычно эта запоминающая система может иметь разное число входных и выходных канальных пар. Множество выходов 42 с запоминающей системы подают далее на входы стереосмесителя 39. Стереосмеситель 39 суммирует все левые входы для создания левого выхода 35 и все правые входы для создания правого выхода 36 с возможной модификацией амплитуды каждого входа перед суммированием. В смесителе не происходит взаимодействия или соединения левого и правого каналов.
Оператор 43 может управлять работой системы через посредство интерфейса 44 для указания желаемой позиции изображения, которую нужно назначить каждому входному каналу.
Может быть особенно полезно реализовать сигнальные процессоры 38 в цифровом виде, чтобы не накладывалось никаких ограничений на положение, траекторию или скорость движения изображения. Ниже будет дано более подробное объяснение этих цифровых звуковых процессоров, которые обеспечивают необходимую дифференциальную настройку фазы и амплитуды на частотно-зависимой базе. В такой цифровой реализации не всегда может быть экономично обеспечивать осуществление обработки сигналов в реальном времени, хотя такая операция полностью выполнима. Если обработка сигналов в реальном времени не предусмотрена, выходы 40 будут подсоединены к запоминающей системе 41, которая будет способна осуществлять медленную регистрацию и воспроизведение в реальном времени. И наоборот, если предусмотрено соответствующее число сигнальных процессоров реального времени 38, запоминающую систему 41 можно исключить.
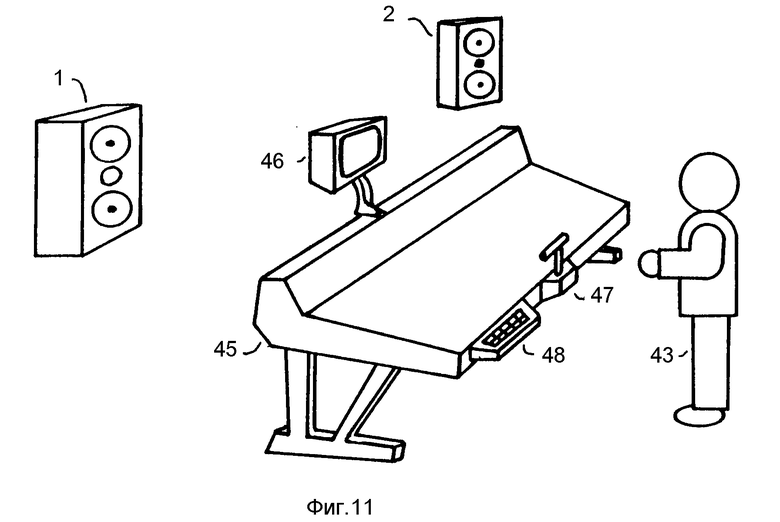
На фиг. 11 оператор 43 управляет смешивающим пультом 45, оборудованным левым и правым стереомониторными громкоговорителями 1, 2. Хотя стабильность конечного обработанного изображения является хорошей до интервала между громкоговорителями в 0,2 м, предпочтительно, чтобы оператор звукосмешения имел расстановку громкоговорителей на расстоянии по крайней мере 0,5 м между собой. При такой расстановке точное размещение изображения достигается более быстро. Предусмотрены дисплейное средство компьютерной графики 46, мультиосное управление 47 и клавиатура 48, а также соответствующие вычислительные и запоминающие устройства для обеспечения их работы.
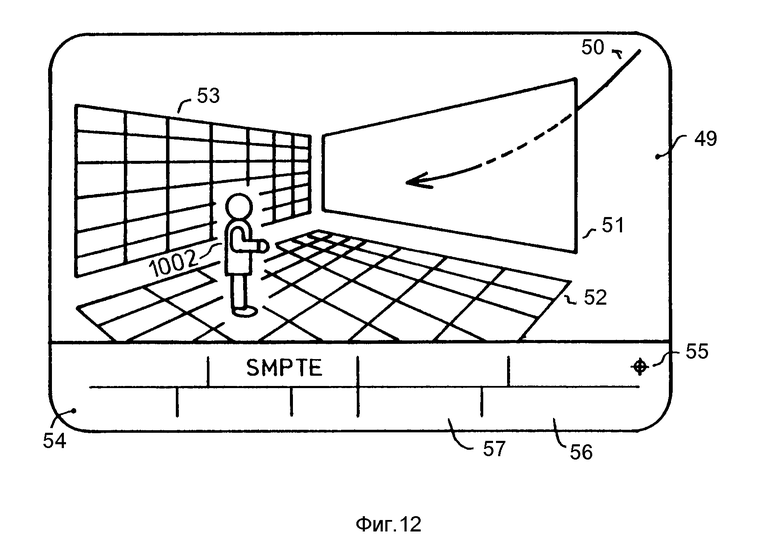
Дисплейное средство компьютерной графики 46 может обеспечить графическое представление положения или траектории изображения, как показано, например, на фиг. 12 и 13. Фиг. 12 показывает дисплейный вид 49 ситуации прослушивания, в которой присутствуют обычный слушатель 3 и траектория изображения 50, а также представлены движущийся экран 51 и перспективные пространственные управляющие сетки 52, 53.
В нижней части дисплейной картинки находится меню 54, дающее пункты, относящиеся к конкретной части звуковой дорожки, с которой происходит работа, включая запись, синхронизацию и информацию редактирования. Пункты меню можно выбирать с клавиатуры 48 или посредством перемещения курсора 55 на нужный пункт, используя мультиосное управление 47. Выбранный пункт меню можно модифицировать, используя клавиатуру 48, или переключить посредством кнопки на пульте мультиосного управления 47, вызвав соответствующее действие системы. В частности, пункт меню 56 позволяет оператору подключить посредством математического обеспечения мультиосное управление 47 для контроля за точкой обзора, из которой проецируют перспективный вид, или для контроля положения/траектории текущего звукового изображения. Другой пункт меню 57 позволяет выбрать другую дисплейную картинку, показанную на фиг. 13.
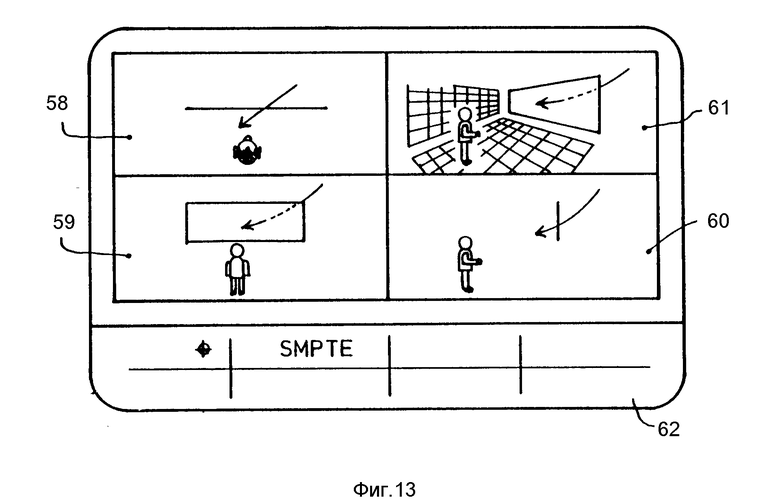
На дисплейной картинке фиг. 13 перспективное представление 49, показанное на фиг. 12 и занимающее фактически полный экран, заменено рядом из трех ортогональных видов того же самого места: видом сверху 58, видом спереди 59 и видом сбоку 60. Для большей наглядности оставшийся квадрант экрана занят уменьшенной и менее детальной версией 61 перспективного вида 49. Здесь снова меню 62 в сущности подобное меню 54 и имеющее сходные функции, занимают нижнюю часть экрана. Один особый пункт меню 62 позволяет произвести переключение на дисплейную картинку фиг. 12.
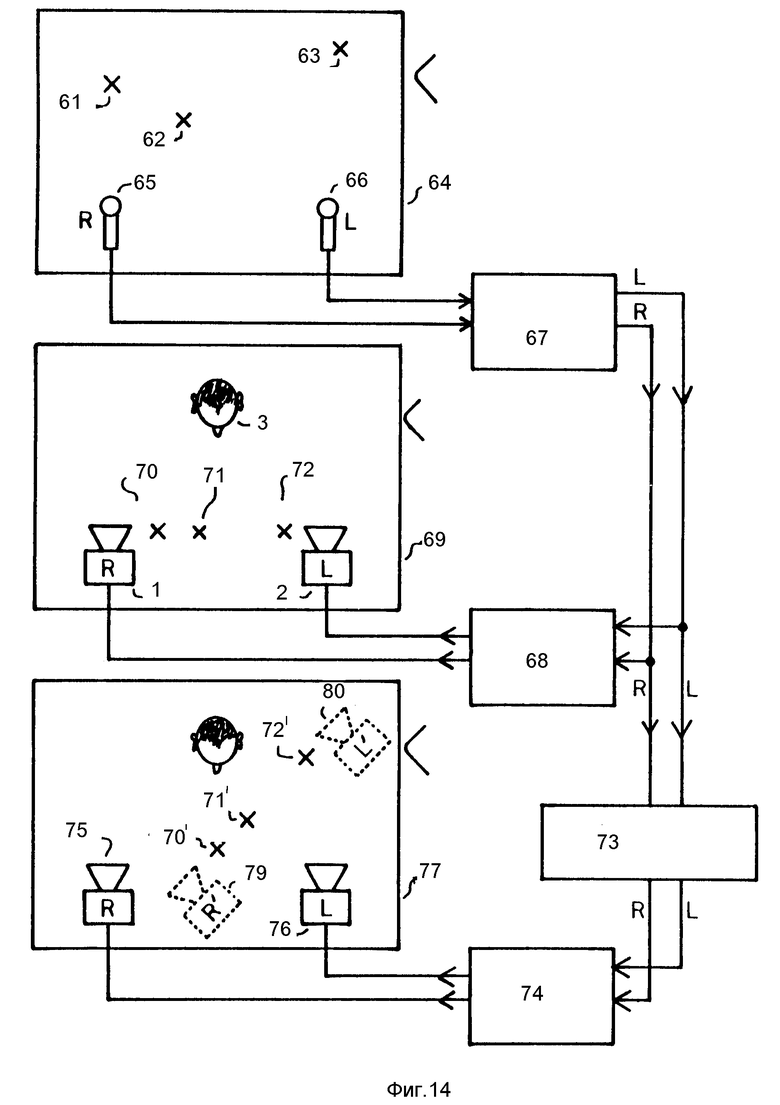
На фиг. 14 звуковые источники 61, 62 и 63 в первой комнате 64 обнаруживают посредством двух микрофонов 65 и 66, которые генерируют правый и левый стереосигналы соответственно, записываемые с использованием обычного стереозаписывающего оборудования 67. При проигрывании на обычном стереовоспроизводящем оборудовании 68, возбуждающем правый и левый громкоговорители 1, 2, соответственно сигналами, возникшими у микрофонов 65, 66, слушатель 3 во второй комнате 69 будет воспринимать обычные стереоизображения 70, 71, 72, соответствующие источникам 61, 62, 63. Эти изображения будут находиться в позициях, которые являются проекциями на линию, соединяющую громкоговорители 1, 2.
Если две пары стереосигналов обрабатывают и объединяют как указано выше, используя звуковой процессор 73, и воспроизводят обычным стереовоспроизводящим оборудованием 74 на правом и левом громкоговорителях 75, 76 в третьей комнате 77, слушателю 78 кажутся четкие пространственно локализованные изображения звуковых источников в положениях, не связанных с реальными положениями громкоговорителей 75, 76. Предположим, что обработка была такой, при которой изображение первоначального сигнала правого канала формировалось в положении 79, а изображение первоначального сигнала левого канала в положении 80. Каждое из этих изображений ведет себя, как если бы оно было реальным громкоговорителем; мы можем думать об изображениях, как о "фактических громкоговорителях".
Для проектирования изображения монофонического звукового сигнала в заданное положение требуется функция передачи, в которой дифференциальную амплитуду и фазу двухканального сигнала регулируется на частотнозависимом базисе по всему звуковому диапазону. Для общих применений при определении каждой такой характеристики необходимо указывать для каждого из двух каналов по всему звуковому спектру амплитуду и фазу, дифференцированные через интервалы, не превосходящие 40 Гц, с целью улучшения стабильности и когерентности изображения. Для применений, не требующих высокого качества и размещения звукового изображения, частотные интервалы можно увеличить. Следовательно, спецификация такой характеристики требует около 1000 реальных чисел (или, соответственно 500 комплексных). Различия для человеческого восприятия звукового пространственного местоположения несколько не определены, так как основаны на субъективных измерениях, но в реальном трехмерном пространстве более 1000 отдельных позиций могут быть определены средним слушателем. Исчерпывающее описание всех характеристик для всех возможных включений в связи в этим широкий спектр данных, заключающих в целом более миллиона реальных чисел.
Следует отметить, что функцию передачи в звуковом процессоре в соответствии с настоящим изобретением, обеспечивающую дифференциальную регулировку между двумя каналами строят шаг за шагом методом проб и ошибок по звуковому спектру для каждого интервала в 40 Гц. Более того, каждая функция передачи в звуковом процессоре локализует звук, относящийся к двум расставленным с определенным интервалом преобразователям, только в одном месте, то есть при одном значении азимута, высоты и глубины.
Однако, на практике нет необходимости представлять все характеристики функции передачи явным образом, так как между правым и левым каналами обычно существует зеркальная симметрия. Если характеристики, модифицирующие каналы, меняют между собой, азимутный угол изображения (а) инвертируется, в то время как высота (b) и дальность (r) остаются неизменными.
Можно продемонстрировать процесс изображения и слуховую иллюзию, используя обычное оборудование и упрощенные сигналы. Если выброс синусоидальной волны на известной частоте плавно отпирать и запирать через сравнительно длительные интервалы, получающимся сигналом будет занята очень узкая полоса частотной области. В результате этот сигнал будет стробировать требуемую характеристику на одной частоте. Следовательно, требуемые характеристики, то есть функции передачи, сводятся до простого управления дифференциальной амплитудой и частотой (или задержкой) между левым и правым каналами на частотнозависимой базе. Таким образом понятно, что функцию передачи для определенного местоположения звука можно построить эмпирически путем проведения регулировки дифференциальной фазы и амплитуды для каждого выбранного частотного интервала по звуковому спектру. По теории Фурье любой сигнал можно представить как сумму ряда синусоидальных волн, поэтому используемый сигнал является всецело общим.
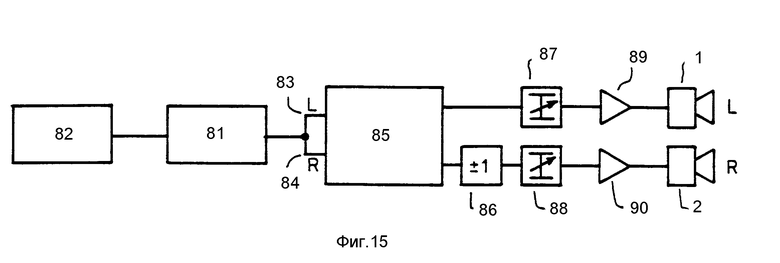
Пример системы для демонстрации настоящего изобретения показан на фиг. 13, где звуковой синтезатор 81 управляется компьютером 82 с целью генерации монофонического звукового сигнала, который подают на входы 83, 84 двух каналов звуковой линии задержки 85. Из линии задержки 85 сигнал правого канала поступает на переключаемый инвертор 83, а затем сигналы левого и правого каналов проходят через соответствующие переменные аттенюаторы 87, 88 и далее поступают на два усилителя мощности 89, 90, возбуждающие левый и правый громкоговорители 1, 2 соответственно.
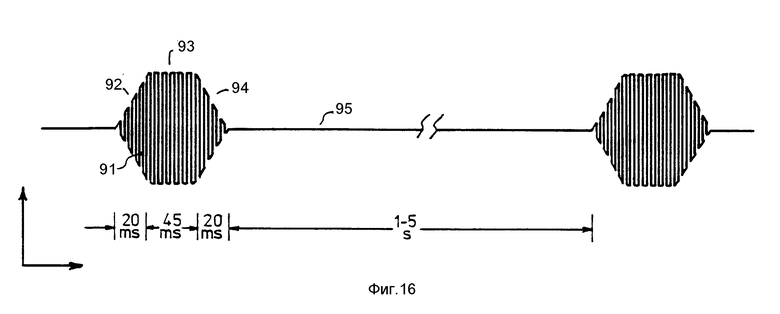
Синтезатор 81 производит плавно регулируемые синусоидальные выбросы любой желаемой тестовой частоты 91, используя огибающую, как показано на фиг. 16. Синусоидальную волну отпирают, используя первую линейную пилу 92 длительностью 20 мс, задерживают на постоянной амплитуде 93 в течение 45 мс, а затем запирают, используя вторую линейную пилу 94 длительностью 20 мс. Выбросы повторяют с интервалами 95 длительностью примерно от 1 до 5 сек.
Кроме того, используя систему фиг. 15 и форму волны фиг. 16, с помощью настоящего изобретения можно простроить функцию передачи по звуковому спектру путем регулировки времени задержки в линии задержки 85 и амплитуды при помощи аттенюаторов 87, 88. Сущность произведет настройку, прослушает местоположение звука и определит, в правильном ли он месте. Если да, будет исследован следующий частотный интервал. Если нет, проведут дальнейшую регулировку и повторят процесс прослушивания. Таким образом можно построить функцию передачи по звуковому спектру.
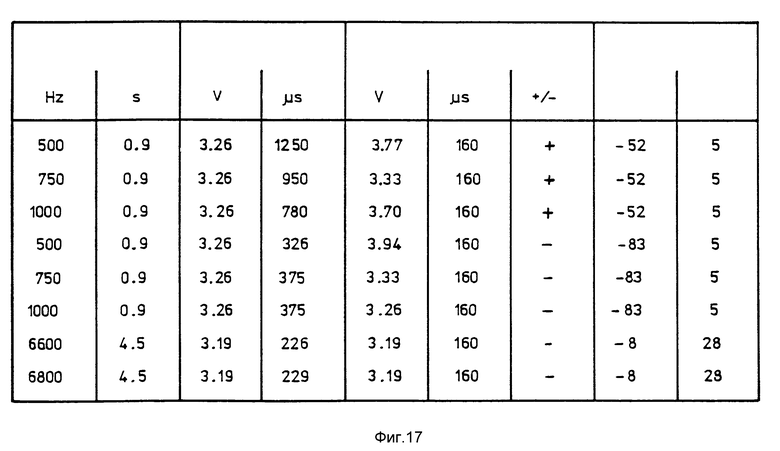
Фиг. 17 представляет таблицу практических данных, подлежащих использованию для формирования подходящей функции передачи, позволяющей правильно воспроизвести слуховые изображения направления громкоговорителей для нескольких частот. Эту табл. можно составить, как описано выше при прослушивании методом проб и ошибок. Было обнаружено, что все эти изображения стабильны и повторяемы во всех трех комнатах прослушивания, для широкого ряда положений головы слушателя, включая случай, когда слушатель находится непосредственно лицом к изображению.
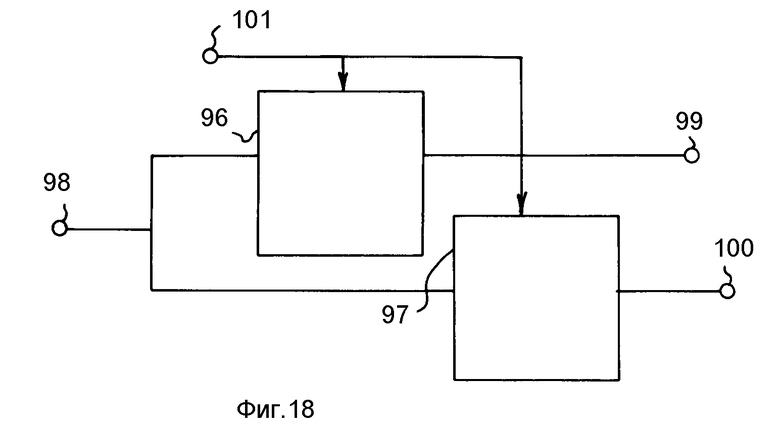
В табл. фиг. 17 амплитуды и задержки к сигналу в каждом канале, и это показано в общем виде на фиг. 18, где имеются отдельные звуковые процессоры 96, 97. Одноканальный звуковой сигнал подают в точку 98, откуда он поступает на оба звуковых процессора 96, 97, где происходит регулировка амплитуды и фазы на частотнозависимой базе таким образом, что разность на выходах левого и правого каналов 99, 100 соответственно является точной величиной, которая была эмпирически определена как показано выше. Управляющие параметры, подаваемые на линию 101 меняют дифференциальную регулировку фазы и амплитуды таким образом, что звуковое изобретение может оказаться в другом, желаемом месте. Например, в цифровом воплощении звуковые процессоры могут быть фильтрами с импульсной характеристикой конечной длительности (КПХ-фильтрами), коэффициенты которых изменяют при помощи сигнала управляющего параметра для предоставления других действительных функций передачи.
Систему фиг.18 можно упростить, как показано в приводимом ниже анализе. Во-первых, интерес представляет только разница или различные между задержками двух каналов. Предположим, что задержки левого и правого каналов составляют t(l) и t(r), соответственно. Новые задержки t'(l) и t'(r) определяют путем прибавления любой фиксированной задержки t(a), так что:
t'(e) t(l) + t(a) (1)
t'(r) t(r) + t(a) (2)
Результатом является то, что весь эффект слышится спустя время t(a) или ранее, если t(a) имеет отрицательное значение. Это общее выражение имеет силу в специальном случае, где t(a) -t(r).
Подставляя, получим
t'(l) t(l) t(r) (3)
t'(r) t(r) t(r) 0 (4)
Путем такой трансформации можно всегда уменьшить задержку в одном канале до нуля. В практической реализации необходимо быть осторожным при вычитании меньшей задержки, чтобы никогда не возникало необходимости в отрицательной задержке. Предпочтительно устранять эту проблему путем оставления фиксированной остаточной задержки в одном канале и изменения задержки в другом. Если фиксированная остаточная задержка имеет достаточную величину, переменная задержка должна быть отрицательной.
Во-вторых, не нужно управлять канальными амплитудами независимо. В звуковой технике обычной операцией является изменение амплитуд сигналов посредством либо усиления, либо ослабления. Пока оба канала изменяют на одно и то же отношение, переносимая позиционная информация не меняется. Важным фактором, который должен быть сохранен, является отношение или разность амплитуд. Пока разность сохраняется, все эффекты и иллюзия данного описания полностью независимы от общего звукового уровня воспроизведения. Соответствующим образом, посредством операции, подобной той, которая описана выше для временного или фазового управления, можно помещать все амплитудное управление в один канал, оставляя другой при фиксированной амплитуде. Снова может быть удобно приложить фиксированное остаточное ослабление к одному каналу, чтобы все требуемые отношения достигались путем ослабления другого. Тогда можно получить полное управление, используя переменный аттенюатор только в одном канале.
Таким образом можно определить всю требуемую информацию путем указания дифференциального ослабления и дифференциальной задержки как функций частоты для одного канала. Для второго канала можно указать фиксированные частотно-независимые ослабление и задержку; если они не указаны, предполагаются единичное усиление и нулевая задержка.
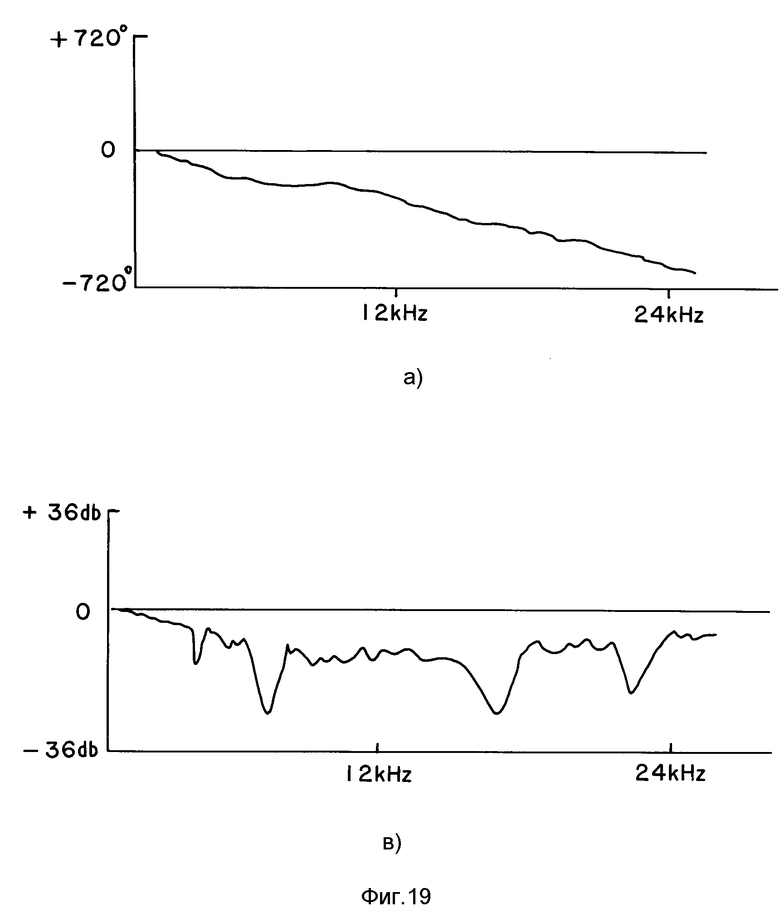
Таким образом, для любой одной звуковой позиции изображения, а, следовательно, любой одной левой/правой функции передачи можно организовать регулировку (фильтрации) дифференциальной фазы и амплитуды в том или ином канале или в любом их сочетании. Один из звуковых процессоров 96, 97 можно упростить до переменного сопротивления или даже до прямого провода. Им не может быть разомкнутая цепь. Если предположить, что фазовую и амплитудную регулировку выполняют только в одном канале для обеспечения необходимой разницы между двумя каналами, то функции передачи будут представлены, как показано на фиг. 19.
Фиг. 19a представляет типичную функцию передачи для дифференциальной фазы двух каналов, где левый канал неизменен, а правый претерпевает фазовую настройку на частотнозависимой базе по звуковому спектру. Подобным образом фиг. 19 b) представляет типичную функцию передачи для дифференциальной амплитуды двух каналов, где амплитуда левого канала неизменна, а правый канал претерпевает ослабление на частотнозависимой базе по звуковому спектру.
Понятно, что блоки звукового размещения, например, 96, 97 фиг. 18 могут быть аналоговыми или цифровыми и могут включать все или некоторые из следующих схемных элементов: фильтры, линии задержки, инверторы, узла суммирования, усилители и фазосдвигатели. Эти функциональные схемные элементы можно организовать любым способом, который даст функцию передачи.
Возможны несколько эквивалентных представлений этой информации, которые обычно используются в соответствующих областях техники.
Например, задержку можно указать как изменение фазы на любой заданной частоте, используя тождества:
Фаза (градусы) 360 • время задержки x частота
фаза (радианы) 2 • x (время задержки) x частота.
Применяя это тождество, необходимо соблюдать осторожность, потому что не достаточно указать главную величину фазы; требуется полная фаза, если вышеупомянутые тождества должны выдерживаться.
Удобным представлением, обычно используемым в электронной технике, является комплексное s-мерное представление. Все реализуемые характеристики фильтров, использующие реальные аналоговые компоненты (и многие, которые не используют), могут быть указаны как отношение двух многочленов в комплексной частотной переменной Лапласа S. Общей формой является:
где
T(S) это функция передачи в плоскости S, Ein(S) и Eout(S) являются входным и выходным сигналами соответственно как функции S, а функции N(S) и D(S) числителя и знаменателя имеют форму:
N(S) a0 + a1S + a2S2 + a3S3 + + anSn (6)
D(S) b0 + b1S+b2S2 + b3S3+ +bnSn (7)
Преимущество этого представления является его компактность. Для указания функции полностью во всех частотах без необходимости интерполяции нужно только указать n + 1 коэффициентов "a" и n + 1 коэффициентов "b". Указав эти коэффициенты, можно быстро получить амплитуду и фазу функции передачи на любой частоте, используя хорошо известные методы. Другим преимуществом этого представления является то, что эта форма наиболее быстро получается из анализа аналоговой схемы, и поэтому может быть принята как наиболее естественный, компактный и приемлемый метод, определяющий функцию передачи такой схемы.
Другим представлением, удобным для использования в описании настоящего изобретения, является Z-мерное представление. В предпочтительном варианте воплощения настоящего изобретения сигнальный процессор будет реализован, как цифровые фильтры для получения преимущества в гибкости. Так как каждую позицию изображения можно определить функцией передачи, нужна такая форма фильтра, при которой функция передачи может быть удобно и быстро реализована с минимальными ограничениями того, каких функций можно достичь. Полностью программируемый цифровой фильтр подходит для удовлетворения этого требования.
Такой цифровой фильтр может работать в частотной области, в этом случае сигнал сначала претерпевает трансформацию Фурье, чтобы перейти от представления во временной области к представлению в частотной области. Затем амплитудную и частотную характеристику фильтра, определяемую одним из вышеуказанных способов, применяют к представлению сигнала в частотной области при помощи комплексного умножения. Наконец, применяют обратное преобразование Фурье, возвращая сигнал во временную область для цифро-аналогового преобразования.
Альтернативно можно указать характеристику прямо во временной области как реальную импульсную характеристику. Эта характеристика математически эквивалентна амплитудной и фазовой характеристике частотной области и может быть получена из нее путем применения обратного преобразования Фурье. Можно применить эту импульсную характеристику непосредственно во временной области путем свертывания ее с представлением сигнала во временной области. Можно продемонстрировать, что операция свертки во временной области математически идентична операции умножения в частотной области, и поэтому прямая свертка полностью эквивалентна операции в частотной области, описанной в предыдущем параграфе.
Так как все цифровые вычисления являются дискретными, а не непрерывными, дискретное представление более предпочтительно, чем аналоговое. Удобно указать характеристику непосредственно через коэффициенты, которые будут применяться в рекурсивном цифровом фильтре прямой свертки, и это делается просто путем использования Z-мерного представления, которое параллельно S-мерному представлению. Таким образом, если T(Z) есть характеристика временной области S, эквивалентная (T(S) в частотной области, то:
где N(Z) и D(Z) имеют форму:
N(Z) C0 + C1Z-1 + C2Z-2 + C3Z-3 + + CnZ-n (9)
D(Z) d0 + d1Z-1 + d2Z-2 + d3Z-3 + +dmZ-m (9)
В этой формуле коэффициентов "c" и "d" достаточно для определения функции, как это было с коэффициентами "a" и "b" в S-мерном представлении, поэтому возможна одинаковая компактность. Z-мерный фильтр может быть прямо реализован, если оператор Z рассматривают таким образом, что Z-1 является задержкой выборочных интервалов.
Далее, определяющие коэффициенты "c" и "d" являются прямыми умножительными коэффициентами в реализации. Мы должны ограничить спецификацию использованием только отрицательных степеней, так как это соответствует положительным задержкам. Положительная степень Z будет соответствовать отрицательной задержки, то есть характеристике перед подачей управляющего воздействия.
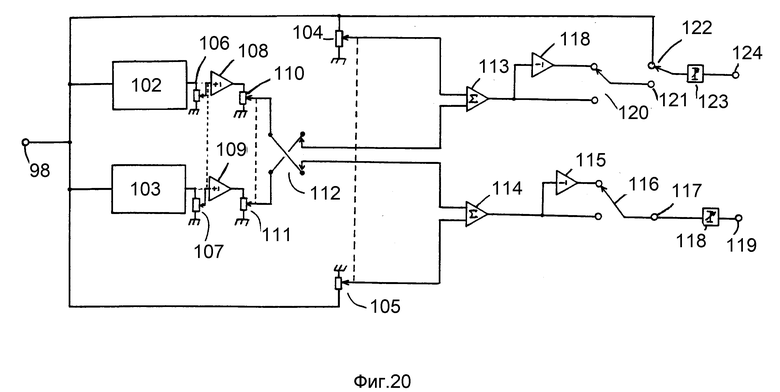
Имея эти представления, мы может описать оборудование, позволяющее размещать изображения звуков, таких как речь и музыка. Для этих целей звуковой процессор настоящего изобретения, например, процессор 38 фиг. 10 может быть реализован как переменный двухпроходный аналоговый фильтр с переменными связывающими аттенюаторами, как на фиг. 20.
На фиг. 20 монофонический входной сигнал 98 подают на два фильтра 102, 103, а также на два потенциометра 104, 105. Выходы фильтров 102, 103 соединены с потенциометрами 106, 107. Четыре потенциометра 104 107 организованы в так называемое координатное управление так, что они действуют по разному. Одна ось координатного управления позволяет контролировать потенциометры 104, 105, в то время как один перемещают с тем, чтобы передать большую часть входного сигнала на его выход, другой механически переводят назад в обратном направлении, чтобы передать меньшую часть входного сигнала на выход. С потенциометрами 106, 107 подобным же образом дифференцированно оперируют на второй независимой оси координатного управления. Выходные сигналы с потенциометров 106, 107 направляют на буферы с единичным усилением 108, 109 соответственно, которые в свою очередь управляют потенциометрами 110, 111 соответственно, которые связаны для взаимодействия, они ступенчато увеличивают или уменьшают часть входного сигнала, передаваемого на выход. Выходные сигналы с потенциометров 110, 111 поступают на реверсивный переключатель 112, который позволяет прямо или перекрестно подавать сигналы фильтра на первые выходы суммирующих элементов 113, 144.
Каждый ответный суммирующий элемент 113, 114 получает на своем втором входе выходной сигнал с потенциометров 104, 105. Суммирующий элемент 114 возбуждает инвертор 115, а переключатель 116 позволяет выбрать прямой или инвертированный сигнал для управления входом 117 аттенюатора 118. Выходным сигналом аттенюатора 118 является так называемый сигнал правого канала 119. Подобным образом суммирующий элемент 113 возбуждает инвертор 118, а переключатель 120 позволяет выбрать прямой или инвертированный сигнал в точке 121. Переключатель 122 позволяет выбрать сигнал 120 или входной сигнал 98 в качестве управления для аттенюатора 123, который производит выходной сигнал левого канала 124.
Фильтры 102, 103 идентичны, и один из них подробно показан на фиг. 21. Буфер единичного усиления 125 получает входной сигнал 98, буфер соединен через емкость 126 с фильтром 127 и управляет им. Подобные элементы фильтров 128 132 соединены последовательно, а конечный элемент фильтра 132 связан через емкость 133 и буфер единичного усиления 134 с инвертором 135 и управляет им. Переключатель 136 на выходе фильтра 137 позволяет выбрать либо выход буфера 134, либо инвертор 135.
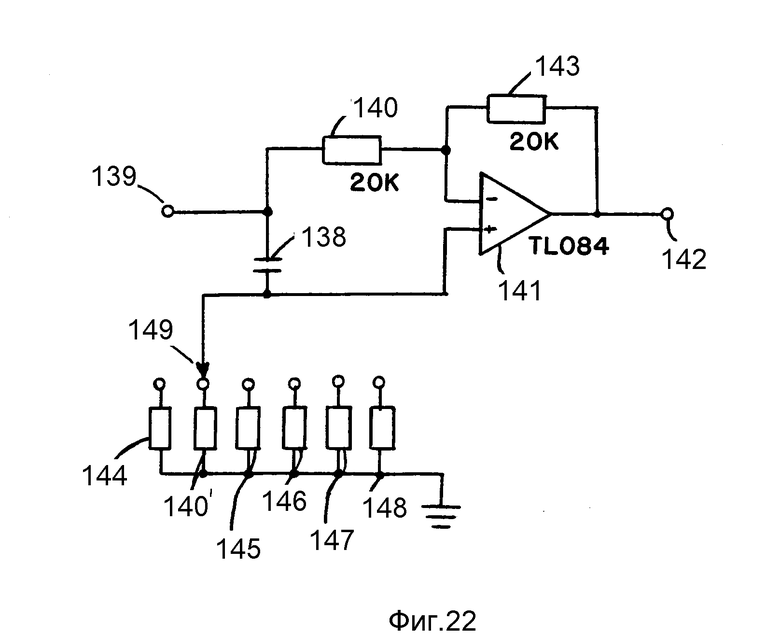
Элементы фильтра 127 132 идентичны и подробно представлены на фиг. 22. Они отличны только по значению своих соответствующих конденсаторов 138. Вход 139 соединен с конденсатором 138, а резистор 140 связан с инвертирующим входом операционного усилителя 141; выход 142 является выходом элемента фильтра. Резистор обратной связи 143, соединен с операционным усилителем 141 обычным способом. Неинвертирующий вход операционного усилителя 141 возбуждают то точки соединения конденсатора 138 и одного из резисторов 140', 144 148 выбираемого переключателя 149. Этот фильтр является фазовым фильтром со сдвигом фазы, который меняется с частотой в соответствии с установкой переключателя 149.
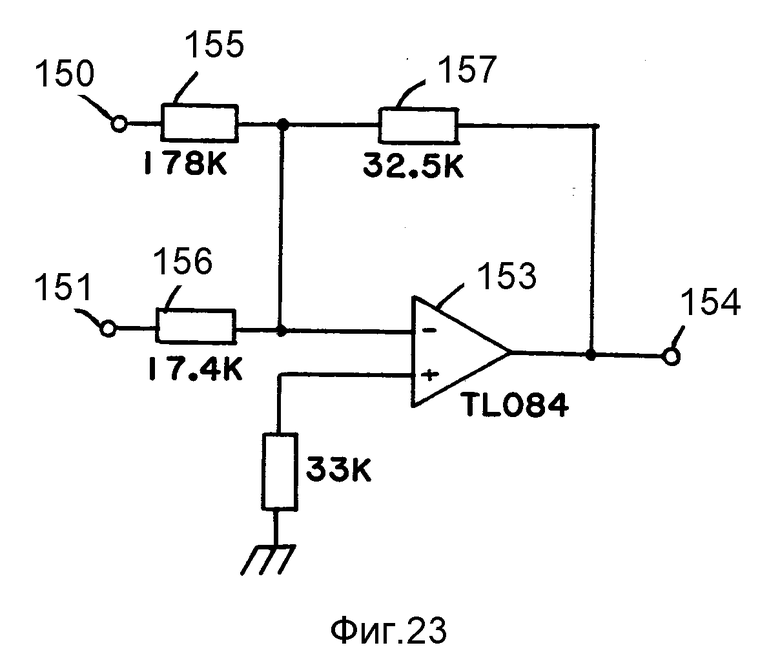
Одно из воплощений суммирующих элементов 113, 114 показано на фиг. 23, где в результате суммирования двух входных сигналов 150, 151 в операционном усилителе 153 получается один выходной сигнал 154. Коэффициенты усиления от входа к выходу определяются резисторами 155, 156 и резистором обратной связи 157. В обоих случаях входом 151 управляют с переключателя 112, а входом 150
с координатных потенциалов 104, 105 соответственно.
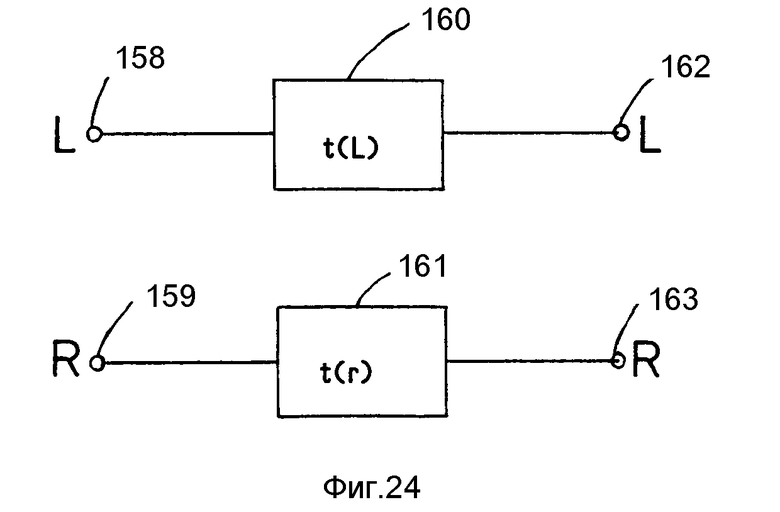
Добавлением двух дополнительных элементов к вышеуказанным схемам обеспечивается еще одна возможность для горизонтального сдвига зоны прослушивания. Однако следует понимать, что это не является необходимым для создания изображений. Дополнительные элементы показаны на фиг. 24, где левый и правый сигналы 158, 159 можно подавать с выходов 119, 124 соответственно сигнального процессора фиг. 20. В каждом канале вставляют задержку 160, 161 соответственно, а выходные сигналы с этих линий задержки становятся выходными сигналами 162, 163 звукового процессора.
Задержки, введенные в каналы этим дополнительным оборудованием, не зависят от частоты. Таким образом, каждая из них может полностью характеризоваться одним действительным числом. Пусть задержкой левого канала будет t(I), а задержкой правого канала -t(r). Как и в вышеуказанном случае, важна разность между задержками, и мы можем полностью управлять оборудованием, указывая разницу задержки. В реализации изобретения будет добавлять фиксированную задержку для каждого канала, чтобы обеспечить то, что по крайней мере не потребуется отрицательной задержки для достижения нужной разности. Определяем дифференциальную задержку t(d) как:
t(d) t(r) t(I)
Если t(d) имеет значение нуля, дополнительное оборудование не будет существенно влиять на получаемые результаты. Если t(d) имеет положительное значение, центр зоны прослушивания будет горизонтально смещен вправо вдоль размера (e) фиг.3. Положительное значение t(d) будет соответствовать положительному значению (e), означающему смещение вправо. Подобным образом при отрицательной величине t(d) можно получить смещение влево, соответствующее отрицательному значению (e). С помощью этого метода всю зону прослушивания, в которой слушатели ощущают иллюзию, можно спроецировать по горизонтали в любую точку между громкоговорителями или за ними. Вполне возможно, чтобы размер (e) превышал половину размер (S), и хорошие результаты были получены при крайних сдвигах, когда размер (e) составляет 83% от размера (S). Это может не являться ограничением метода, а представляет предел текущих экспериментов.

Использование: для получения и локализации кажущегося источника звука в трехмерном пространстве. Сущность изобретения: разделяют электрический сигнал на соответствующие сигналы первого и второго каналов, производят одновременное независимое изменение амплитуд и сдвиг фаз, подаваемых на первый и второй громкоговорители сигналов в зависимости от их частоты, поддерживают разность фаз и амплитуд сигналов первого и второго каналов в последовательных дискретных частотных полосах звукового диапазона. При этом каждый последующий сдвиг фазы отличен от предыдущего. 2 с. и 5 з.п. ф-лы, 24 ил.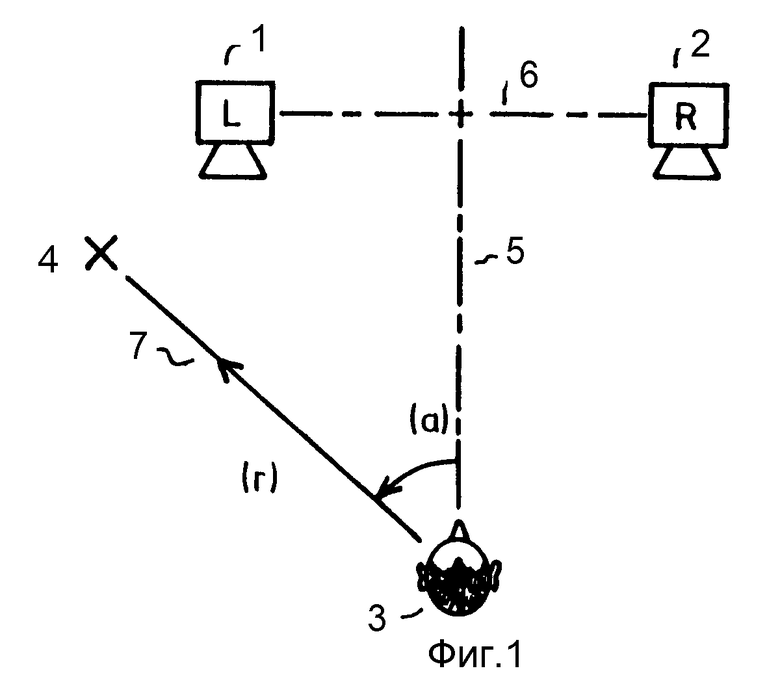
| GB, патент Великобритании, 2109658, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
