Изобретение относится к измерительной технике и может быть использовано для контроля линейных размеров, например для контроля уровня воды в резервуарах систем водоснабжения.
Известен способ контроля расстояния до поверхности объекта, заключающийся в том, что излучают акустический импульс вдоль базового направления и вдоль контролируемого расстояния, формируют строб длительностью, пропорциональной времени прохождения акустическим импульсом фиксированного расстояния вдоль базового направления, используют данный строб для автоматической регулировки частоты следования счетных импульсов, формируют из переотраженных акустических импульсов два информационных интервала времени, которые заполняют счетными импульсами и сравнивают по длительности [1]
Устройство для реализации известного способа содержит акустический датчик, первый луч двухлучевой диаграммы направленности которого ориентирован вдоль базового направления, а второй луч вдоль контролируемого расстояния, электронный блок формирования выходного сигнала.
Однако известный способ характеризуется недостаточной точностью контроля.
Известен способ контроля расстояния до поверхности объекта, заключающийся в том, что вырабатывают последовательность счетных импульсов, формируют строб длительностью, равной интервалу времени, необходимому для зондирования базового расстояния, используют данный строб для автоматической регулировки частоты следования последовательности счетных импульсов, организуют процесс автоциркуляции акустических импульсов, зондирующих контролируемое расстояние, используют данные импульсы для формирования последовательности информационных импульсов и судят о контролируемом расстоянии по количеству счетных импульсов, регистрируемых в течение интервала времени, необходимого для формирования заданного количества периодов последовательности информационных импульсов [2]
Известно устройство для реализации способа контроля расстояния до поверхности объекта, содержащее акустический датчик в составе двух ультразвуковых преобразователей, один из лучей двухлучевой диаграммы направленности первого из которых ориентирован вдоль контролируемого расстояния, а другой вдоль направления, встречного направления пространственной ориентации одного из лучей двухлучевой диаграммы направленности второго преобразователя, установленного вдоль данного направления на базовом расстоянии от первого преобразователя; и электронный блок формирования выходного сигнала в составе схемы коммутации ультразвуковых преобразователей акустического датчика, схема формирования последовательности информационных импульсов, счетчика периодов данной последовательности, схемы формирования и автоматической регулировки частоты следования последовательности счетных импульсов и счетчика импульсов данной последовательности с подключением входа сброса показаний последнего к выходу счетчика периодов последовательности информационных импульсов.
В известном способа выходной сигнал представляет собой последовательность счетных импульсов, частоту следования которых необходимо корректировать в зависимости от изменений параметров окружающей акустический датчик среды, определяющий значение скорости распространения зондирующих контролируемое расстояние ультразвуковых импульсов, что усложняет как сам способ, так и устройство для его реализации.
Задача изобретения упрощение способа и устройства для его реализации.
Поставленная задача решается тем, что в способе контроля расстояния до поверхности объекта, заключающемся в организации процесса автоциркудяции основных акустических импульсов, зондирующих контролируемое расстояние, и использовании данных импульсов для формирования последовательности информационных импульсов, предлагается организовать процесс автоциркуляции дополнительных акустических импульсов, зондирующих базовое расстояние, использовать данные импульсы для формирования последовательности стандартных импульсов и судить о контролируемом расстоянии по соотношению количества стандартных и количества информационных импульсов, регистрируемых в интервале времени между двумя моментами одновременного формирования информационного и стандартного импульсов соответствующей последовательности.
Поставленная задача решается также тем, что в устройстве для реализации способ контроля расстояния до поверхности объекта, содержащем акустический датчик в составе двух ультразвуковых преобразователей, один из лучей двухлучевой диаграммы направленности первого из которых ориентирован вдоль контролируемого расстояния, и электронный блок формирования выходного сигнала в составе схемы формирования последовательности информационных импульсов и счетчика периодов данной последовательности, предлагается второй луч двухлучевой диаграммы направленности первого ультразвукового преобразователя акустического датчика ориентировать вдоль направления пространственно ориентации одного из лучей двухлучевой диаграммы направленности второго преобразователя, установленного вдоль данного направления на базовом расстоянии от отражателя акустических импульсов, ориентированного перпендикулярно направлению распространения данных импульсов, а в состав электронного блока формирования выходного сигнала предлагается включить схему формирования последовательности стандартных импульсов, счетчик периодов данной последовательности и логический элемент И, выход которого необходимо подключить к входу сброса показаний счетчика периодов последовательности информационных импульсов, объединенного с входом сброса показаний счетчика периодов последовательности стандартных импульсов, при этом схема формирования последовательности информационных импульсов и схема формирования последовательности стандартных импульсов должны включать в себя по одному генератору зондирующих импульсов, электронному ключу и усилителю-формирователю с подключением входа электронного ключа к первому выходу генератора и к соответствующему (первому и второму) ультразвуковому преобразователю акустического датчика, отпирающего входа электронного ключа к второму выходу генератора и с подключением запирающего входа электронного ключа, объединенного с входом генератора, к выходу усилителя-формирователя, вход которого подключен к выходу электронного ключа, а выход к первому (или второму) входу логического элемента И и к входу счетчика периодов последовательности соответствующих (информационных или стандартных) импульсов.
На фиг. 1 представлена схема устройства для реализации способа контроля расстояния до поверхности объекта, на фиг. 2 изображены временные диаграммы, поясняющие способ и работу устройства.
Устройство для реализации предлагаемого способа содержит акустический датчик 1 в составе двух ультразвуковых преобразователей 2 и 3 и отражателя 4 акустических импульсов и электронный блок 5 формирования выходного сигнала в составе генераторов 6 и 7 зондирующих импульсов, электронных ключей 8 и 9, усилителей-формирователей 10 и 11, счетчика 12 периодов последовательности информационных импульсов, счетчика 13 периодов последовательности стандартных импульсов и логического элемента И 14 (фиг. 1).
Луч J1 двухлучевой диаграммы направленности первого преобразователя 2 акустического датчика 1 ориентирован вдоль контролируемого расстояния lx до поверхности 15 объекта 16, а луч J2 вдоль направления пространственной ориентации луча  двухлучевой диаграммы направленности второго преобразователя 3, установленного вдоль данного направления на базовом расстоянии lб от отражателя 4, ориентированного перпендикулярно луче
двухлучевой диаграммы направленности второго преобразователя 3, установленного вдоль данного направления на базовом расстоянии lб от отражателя 4, ориентированного перпендикулярно луче 
Генератор 6 (7), электронный ключ 8 (9) и усилитель-формирователь 10 (11) электронного блока 5 составляют схему формирования последовательности информационных (стандартных) импульсов с подключением входа ключа 8 (9) к первому выходу генератора 6 (7) и к преобразователю 2 (3) акустического датчика 1, отпирающего входа ключа 8 (9) к второму выходу генератора 6 (7) и с подключением запирающего входа ключа 8 (9), объединенного с входом генератора 6 (7), к выходу усилителя-формирователя 10 (11), вход которого подключен к выходу ключа 8 (9), а выход к первому (второму) входу логического элемента 14 и ко входу счетчика 12 (13).
Способ заключается в следующем.
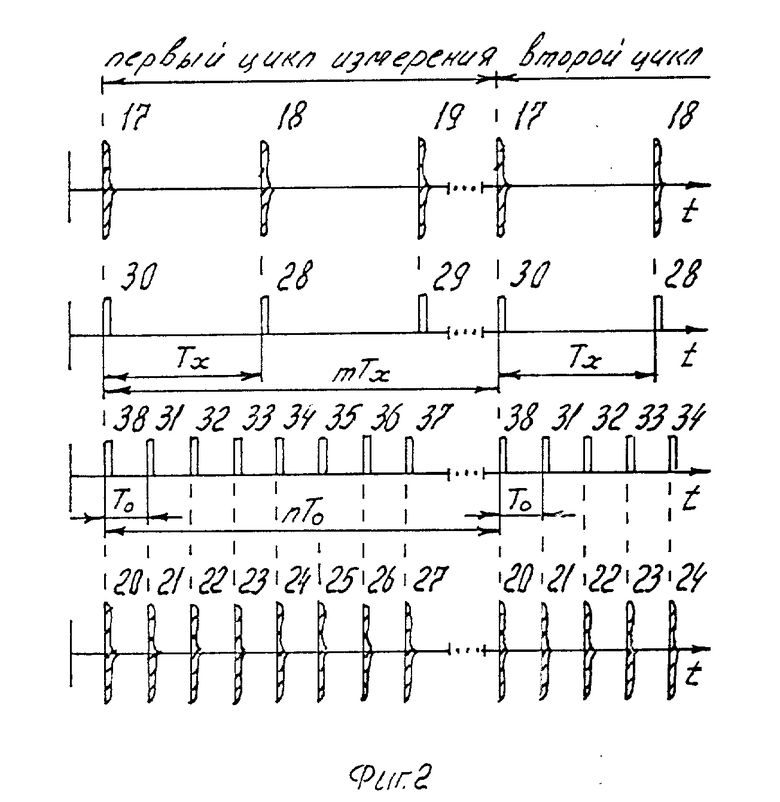
Предлагаемый способ контроля расстояния lx до поверхности 15 объекта 16 заключается в организации процесса автоциркуляции основных акустических импульсов 17 19, зондирующих контролируемое расстояние lx, и дополнительных акустических импульсов 20 27, зондирующих базовое расстояние lб, регистрации периодов n последовательности информационных импульсов 28 30, сопровождающейся регистрацией периодов n последовательности стандартных импульсов 31 38, и в определении соотношения значений n и m данных периодов, регистрируемых в интервале времени n • T0 (m • Tx) между двумя моментами одновременного формирования информационного импульса 30 и стационарного импульса 38 (фиг. 1 и фиг. 2).
Устройство для реализации предлагаемого способа включает в себя акустический датчик 1 и электронный блок 5 формирования выходного сигнала. При этом в блоке 5 не предусмотрена схема синхронизации моментов излучения ультразвуковыми преобразователями 2 и 3 первых акустических импульсов, поэтому первый цикл измерения начинается в момент сброса показаний счетчиков 12 и 13 сигналом с выхода логического элемента 14 (фиг. 1). Данный сигнал формируется при одновременном поступлении на первый и второй входы элемента 14 соответственно информационного и стандартного импульсов 30 и 38, формируемых усилителями 10 и 11.
Информационный импульс 30 возбуждает генератор 6, которым вырабатывается сигнал, на основе которого первый ультразвуковой преобразователь 2 излучает акустический импульс 17 в направлении поверхности 15 объекта 16. Одновременно задним фронтов сигнала с второго выхода генератора 6 откроется электронный ключ 8, предназначенный для блокирования входа усилителя-формирователя 10 на время, необходимое для излучения преобразователем 2 каждого из акустических импульсов 17 19.
Спустя время Tx, необходимое для прохождения акустическим импульсом 17 контролируемого расстояния lx и возвращения отраженного поверхностью 15 акустического импульса к преобразователю 2, последний, возбуждаясь, посылает через электронный ключ 8 электрический сигнал на вход усилителя 10, формирующего первый импульс 28 последовательности информационных импульсов 28 30. Данный импульс запирает электронный ключ 8, регистрируется счетчиком 12 и поступает на вход генератора 6, на основе сигнала которого преобразователь 2 излучает в сторону объекта 16 следующий акустический импульс 18. Начинается процесс автоциркуляции основных акустических импульсов 17 19, который производится по контуру: генератор 6 преобразователь 2 поверхность 15 объекта 16 преобразователь 2 электронный ключ 8 - усилитель-формирователь 10 генератор 6.
Одновременно элементами 9, 7, 11 схемы блока 5 и вторым преобразователем 3 производится автоциркуляция дополнительных акустических импульсов 20 27, зондирующих базовое расстояние до отражателя 4 и считывание счетчиком 13 периодов последовательности стандартных импульсов 31 38, формируемой усилителем 11.
Регистрация импульсов 28 38 счетчиками 12 и 13 производится до момента одновременного поступления на первый и второй входы логического элемента И 14 соответственно импульсов 30 и 38, т.е. первый (и последующие) цикл измерения заканчивается при достижении равенства значений mTx и nTo, где m и n количество периодов Tx и To соответствующей последовательности импульсов 28 38, в результате чего контролируемому расстоянию lx будет соответствовать значению Kx • lб, где Kx параметр, равный отношению значений n и m.
Со сбросом показаний счетчиков 12 и 13 процессы автоциркуляции основных и дополнительных акустических импульсов 17 19 и 20 27 не прекращаются, и излучаемые вслед за акустическими импульсами 17 и 20 импульсы 18 и 21 являются первыми зондирующими импульсами следующего цикла измерения. При этом длительность формуемых усилителей 10 и 11 электрических импульсов 28 38 может выбираться таким образом, чтобы срабатывание логического элемента 14 обеспечивалось и при незначительных (в пределах данной погрешности) несовпадениях во времени передних фронтов импульсов 30 и 38.
Электрические импульсы 28 38 соответствуют акустическим импульсам 17 - 27, в результате чего значение контролируемого расстояния lx, равное величине Kxlб, не зависит от возможных измерений параметров среды распространения акустических импульсов, определяющих значение скорости звука, поэтому предлагаемый способ позволяет по сравнению с прототипом производить измерения без формирования последовательности счетных импульсов и без периодически сопровождаемой этот процесс корректировки значения их частоты следования и тем самым упростить способ и схему устройства для его реализации без снижения точности контроля.
Использование: измерительная техника, в частности контроль линейных размеров, например контроль уровня воды в резервуарах систем водоснабжения. Сущность изобретения: организация процесса автоциркуляции основных акустических импульсов, зондирующих контролируемое расстояние, использование данных импульсов для формирования последовательности информационных импульсов, организация процесса автоциркуляции дополнительных акустических импульсов, зондирующих базовое расстояние, использование данных импульсов для формирования последовательности стандартных импульсов и определении контролируемого расстояния по соотношению количества стандартных и информационных импульсов, регистрируемых в интервале времени между двумя моментами одновременного формирования стандартного и информационного импульсов соответствующей последовательности. Устройство для реализации способа содержит акустический датчик в составе двух ультразвуковых преобразователей, один из лучей двухлучевой диаграммы направленности первого из которых ориентирован вдоль контролируемого расстояния, а другой - вдоль направления пространственной ориентации одного из лучей двухлучевой диаграммы направленности второго преобразователя, установленного на базовом расстоянии от отражателя акустических импульсов, ориентированного перпендикулярно направлению распространения данных импульсов, и электронный блок формирования выходного сигнала. 2 с.п. ф-лы, 2 ил.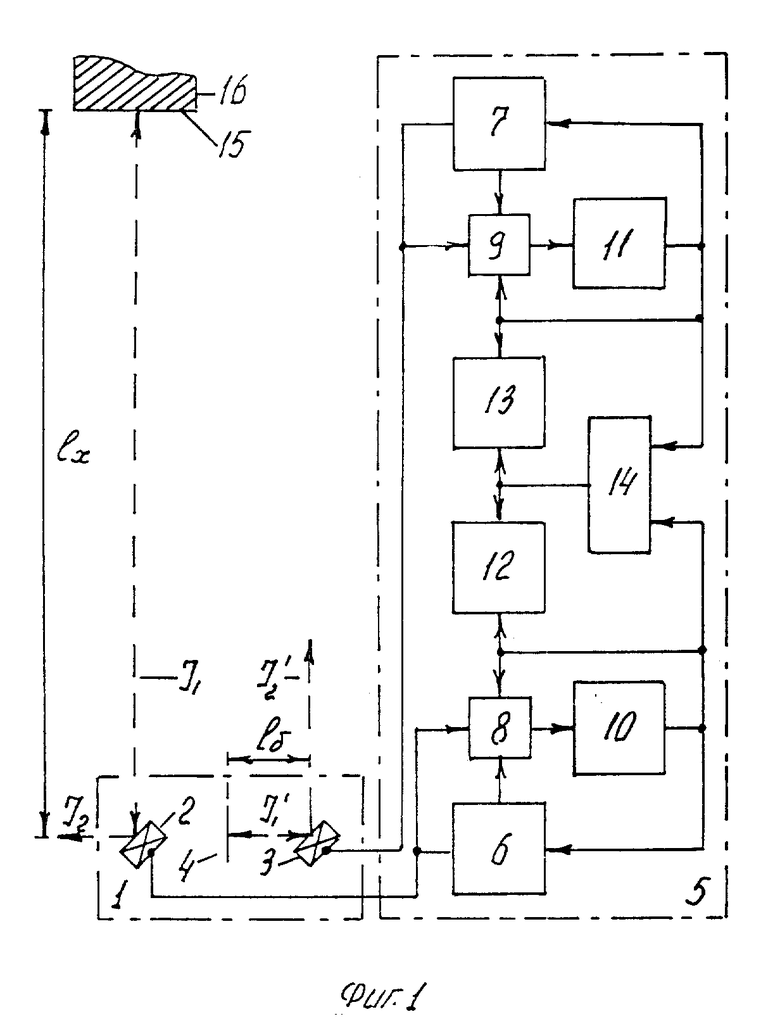
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения уровня жидких сред | 1982 |
|
SU1048322A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ультразвуковой измеритель линейных величин | 1984 |
|
SU1180691A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
