Изобретение относится к измерительной технике и может быть использовано для контроля уровня воды в резервуарах систем водоснабжения.
Известен способ измерения расстояния до объекта, заключающийся в том, что излучают акустический импульс вдоль базового направления и в направлении контролируемого объекта, формируют информационный импульс длительности, пропорциональный времени прохождения акустическим импульсом фиксированного расстояния вдоль базового направления, используют информационный импульс для автоматической регулировки частоты следования счетных импульсов, формируют из переотраженных акустических импульсов два информационных интервала времени, которые заполняют счетными импульсами, и сравнивают по длительности [1]
Устройство для реализации известного способа содержит акустический датчик, первый луч двухлучевой диаграммы направленности которого ориентирован вдоль базового направления, а второй луч в направлении контролируемого объекта, и электронный блок формирования выходного сигнала.
Однако, известный способ характеризуется недостаточной точностью измерения.
Известен способ измерения расстояния до объекта, заключающийся в том, что вырабатывают последовательность счетных импульсов, формируют строб длительностью, равной интервалу времени, необходимого для зондирования базового расстояния, используют данный строб для автоматической регулировки частоты следования счетных импульсов, организуют автоциркуляцию акустических импульсов, зондирующих расстояние до контролируемого объекта, используют данные импульсы для формирования последовательности информационных импульсов и судят о расстоянии до контролируемого объекта по количеству счетных импульсов, вырабатываемых в интервале времени, необходимого для формирования заданного количества информационных импульсов [2]
Известно устройство для реализации способа измерения расстояния до объекта, содержащее акустический датчик в составе двух ультразвуковых преобразователей, один из лучей двухлучевой диаграммы направленности первого из которых ориентирован вдоль направления на контролируемый объект, а другой луч вдоль направления, встречного направлению пространственной ориентации одного из лучей двухлучевой диаграммы направленности второго преобразователя, установленного вдоль данного направления на фиксированном, базовом расстоянии от первого преобразователя; и электронный блок формирования выходного сигнала в составе контура автоциркуляции зондирующих импульсов, схемы формирования и автоматической регулировки частоты следования счетных импульсов и электронного счетчика данных импульсов.
В известном способе выходной сигнал представляет собой последовательность счетных импульсов, частоты следования которых необходимо корректировать в зависимости от изменений параметров окружающей акустический датчик среды, влияющих на значение скорости распространения зондирующих контролируемое расстояние ультразвуковых импульсов, что усложняет как сам способ, так и устройство для его реализации.
Кроме того, при использовании известного способа для контроля уровня жидких сред (например, уровня воды в резервуарах систем водоснабжения) возможны помехи, вызываемые переотражением "контролируемым объектом" (поверхностью воды) ультразвуковых импульсов, излучаемых как первым (рабочим), так и вторым (вспомогательным) преобразователем акустического датчика, что снижает точность (достоверность) измерения.
Цель изобретения упрощение способа и повышение его точности (достоверности).
Поставленная цель достигается тем, что в способе измерения расстояния до объекта, заключающемся в том, что организуют автоциркуляцию акустических импульсов, зондирующих расстояние до контролируемого объекта, используют данные импульсы для формирования первой последовательности информационных импульсов, предлагается организовать автоциркуляцию акустических импульсов, зондирующих расстояние, равное суммарному значению базового и расстояния до контролируемого объекта, использовать данные импульсы для формирования второй последовательности информационных импульсов и судить о расстоянии до контролируемого объекта по количеству информационных импульсов второй последовательности, регистрируемых в интервале времени между двумя моментами одновременного формирования информационных импульсов соответственно первой и второй последовательностей.
При этом в устройстве для реализации способа измерения расстояния до объекта, содержащем акустический датчик в составе двух ультразвуковых преобразователей, один из лучей двухлучевой диаграммы направленности первого из которых ориентирован вдоль направления на контролируемый объект, а другой - вдоль направления, встречного направлению пространственной ориентации одного из лучей двухлучевой диаграммы направленности второго преобразователя, установленного вдоль данного направления на фиксированном расстоянии от первого преобразователя; и электронный блок формирования выходного сигнала в составе первого контура автоциркуляции зондирующих импульсов и электронного счетчика, предлагается первый и второй преобразователи акустического датчика установить со смещением друг относительно друга на базовое расстояние вдоль направления на контролируемый объект с пространственной ориентацией вдоль данного направления одного из лучей двухлучевой диаграммы направленности второго преобразователя, а в состав электронного блока формирования выходного сигнала включить второй контур автоциркуляции зондирующих импульсов и логический элемент И с подключением к второму входу и выходу последнего соответственно первого и второго входов электронного счетчика. При этом каждый из двух контуров автоциркуляции предлагается составить из генератора зондирующих импульсов, одного электронного ключа и усилителя-формирователя с подключением первого входа генератора, объединенного с входом электронного ключа, к соответствующему (первому или второму) ультразвуковому преобразователю акустического датчика, второго выхода генератора к отпирающему входу ключа, и с подключением входа генератора, объединенного с запирающим входом электронного ключа, к выходу усилителя-формирователя, вход которого предлагается подключить к выходу электронного ключа, а выход к соответствующему (первому или второму) входу логического элемента И.
В состав электронного блока формирования выходного сигнала может быть включен третий электронный ключ с подключением его выхода и запирающего входа к входу генератора первого контура автоциркуляции, входа к выходу усилителя-формирователя второго контура автоциркуляции зондирующих импульсов, а отпирающего входа к выходу логического элемента И.
Кроме того, акустический датчик устройства предлагается смонтировать на вертикальном штуцере резервуара с контролируемой жидкостью и выполнить в виде двух труб с равными по длине вертикальными участками и горизонтальными участками, отличающимися по длине на величину заданного базового расстояния. При этом первый и второй ультразвуковые преобразователи предлагается выполнить в форме цилиндров и по одному установить на стенках горизонтальных участков труб на равном расстоянии от их торцов, а вертикальные участки труб снабдить поплавками, по одному помещенными в полость каждой трубы, объединенную с резервуаром через торец горизонтального участка последней.
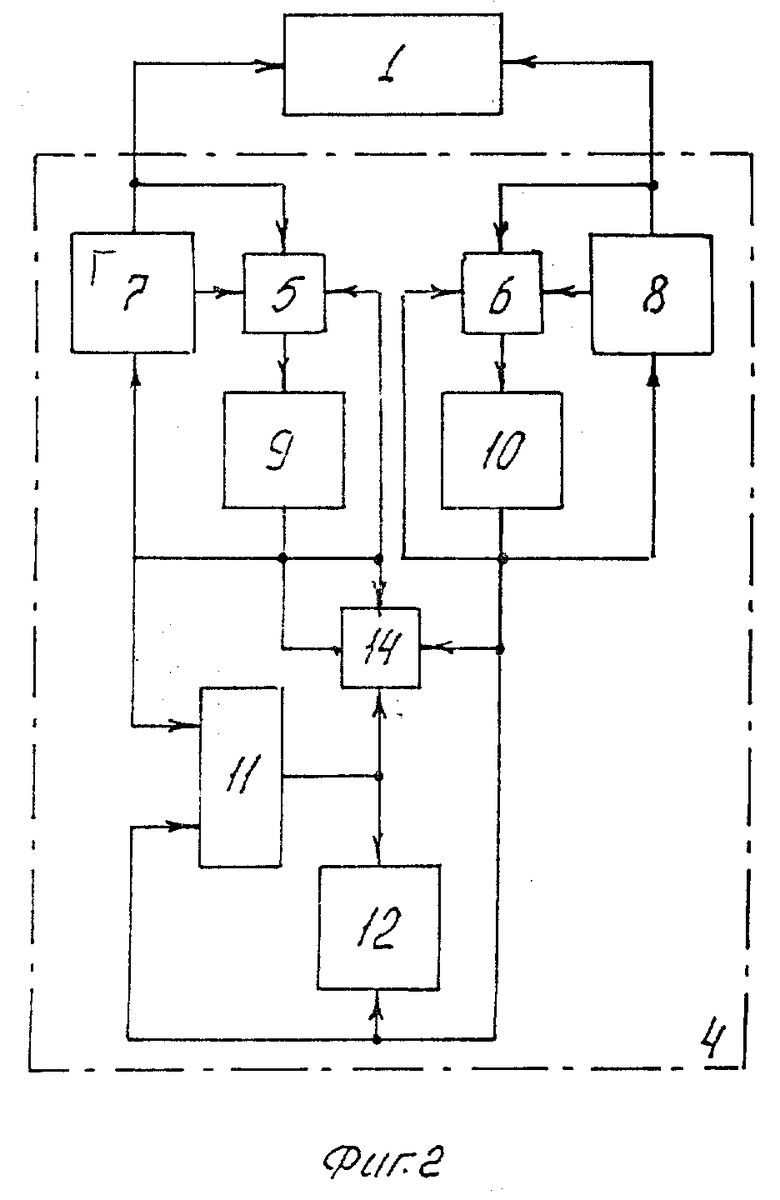
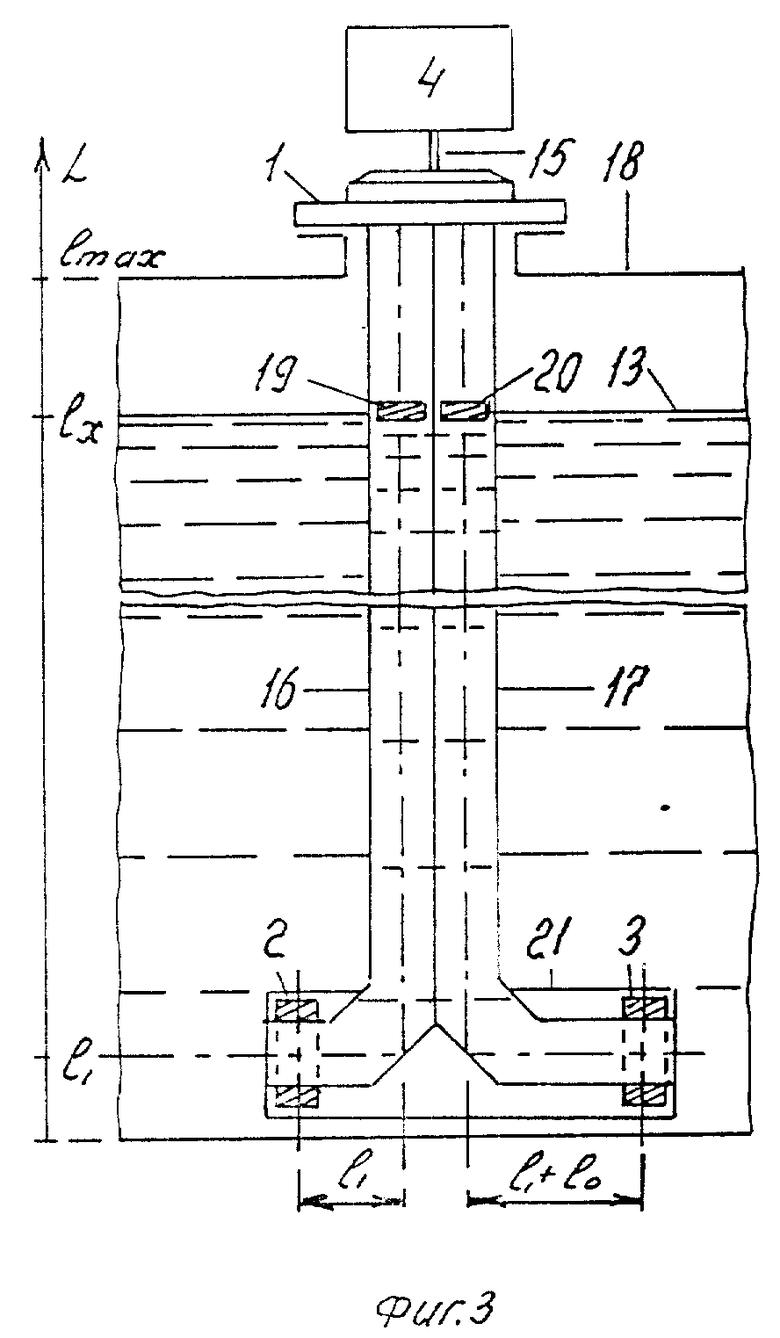
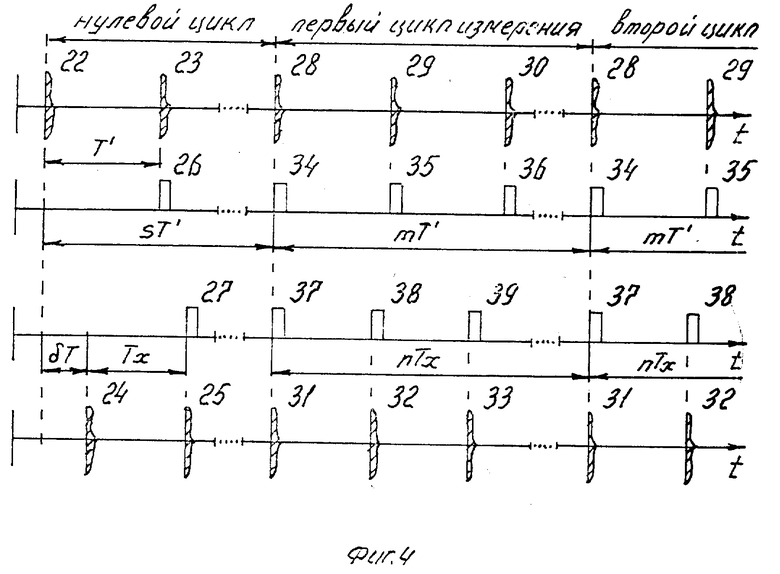
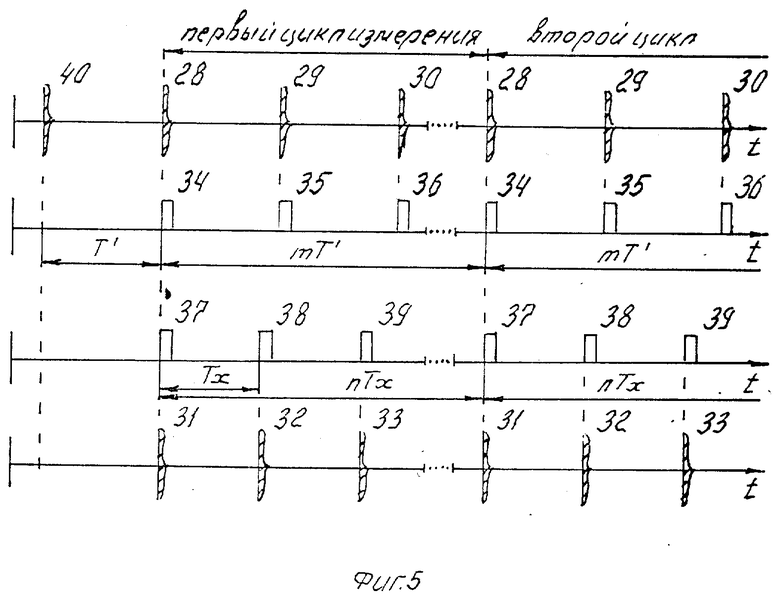
На фиг.1 представлена схема устройства для реализации способа измерения расстояния до объекта; на фиг.2 второй вариант электронного блока формирования выходного сигнала; на фиг. 3 конструкция акустического датчика устройства; на фиг.4 и 5 временные диаграммы, поясняющие способ и работу устройства.
Устройство для реализации предлагаемого способа содержит акустический датчик 1 в составе двух ультразвуковых преобразователей 2 и 3 и электронный блок 4 формирования выходного сигнала в составе двух контуров автоциркуляции (каждый из которых содержит электронный ключ 5(6), генератор 7(8) зондирующих импульсов и усилитель-формирователь 9(10) электрических импульсов), логического элемента И и электронного счетчика 12; при этом преобразователи 2 и 3, предназначенные для зондирования расстояний lx и l' до объекта 13, выполнены двухлучевыми (фиг.1). По второму варианту в состав блока 4 включен третий электронный ключ 14 (фиг.2).
Акустический датчик 1, подключенный к электронному блоку 4 кабелем 15, может быть выполнен в виде двух труб 16 и 17, смонтированных на вертикальном штуцере резервуара 18 с контролируемой жидкостью и снабженных поплавками 19 и 20 (фиг.1). При этом цилиндрические преобразователи 2 и 3 установлены на горизонтальных участках труб 16 и 17, длина одного из которых превышает длину другого на величину базового расстояния lo.
Способ заключается в следующем.
Предлагаемый способ измерения расстояния до объекта заключается в организации автоциркуляции акустических импульсов 32-33, зондирующих контролируемое расстояние lx, и акустических импульсов 28-30, зондирующих расстояние l', равное суммарному значению расстояний lx и lo, и в считывании информационных импульсов 34-36, вырабатываемых за интервал времени mT'(nTx) между двумя последовательными моментами одновременного формирования импульсов 37 и 34 соответственно первой и второй последовательностей информационных импульсов 37-39 и 34-36 (фиг.4 и 5).
Устройство для реализации предлагаемого способа включает в себя акустический датчик 1 и электронный блок 4 формирования выходного сигнала (фиг.1). При этом в блоке 4 не предусмотрена синхронизации первых акустических импульсов 22 и 24, поэтому первому циклу измерения предшествует нулевой цикл (фиг. 4), длительность sT' которого определяется временем формирования импульсов 28 и 31, отсчитываемым от момента включения блока 4.
На фиг. 4 показан случай, когда преобразователь 2 посылает свой первый акустический импульс 24 в направлении объекта 13 спустя время δT после излучения преобразователем 3 его первого импульса 22. спустя время T', необходимое для прохождения расстояния 2l' с промежуточным переотражением поверхностью контролируемого объекта 13, акустический импульс 22 принимается ультразвуковым преобразователем 3, сигнал от которого через электронный ключ 6 поступает на вход усилителя 10, формирующего стандартный электрический импульс 26. Импульс 26 запирает ключ 6 и одновременно поступает на вход генератора 8, который сформирует электрический импульс для возбуждения преобразователя 3 и отпирания ключа 6, предназначенного для предотвращения поступления импульсов генератора 8 на вход усилителя-формирователя 10.
Преобразователь 3 излучает в сторону объекта 13 следующий акустический импульс 23. Начинается процесс автоциркуляции зондирующих расстояние l' импульсов, который производится по контуру: генератор 8 преобразователь 3 - объект 13 преобразователь 3 электронный ключ 6 усилитель-формирователь 10 генератор 8. Параллельно элементами 2,5,7 и 9 схемы блока 4 производится автоциркуляция импульсов, зондирующих расстояние lx.
Первый цикл измерения начинается в момент одновременного поступления импульсов 37 и 34 соответственно на первый и второй входы логического элемента И 11. При этом сигналом с выхода элемента И 11 сбрасываются показания счетчика 12, регистрировавшего стандартные импульсы усилителя 10 во время проведения нулевого цикла.
Сбрасывание показаний электронного счетчика 12 производится периодически, т.е. при окончании очередного цикла измерения, сопровождаемого формированием усилителем 10 второй последовательности информационных импульсов 34-36 и формированием усилителем 9 первой последовательности информационных импульсов 37-39. Данные информационные импульсы соответствуют акустическим импульсам 28-30 и 31-33, поэтому показания счетчика 12 не зависят от скорости зондирования расстояний l' и lx, т.е. не зависят от возможных изменений параметров среды распространения акустических импульсов.
Как показано на фиг.4, очередной цикл измерения заканчивается при равенстве значений mT' и nTx, где m и n количество периодов T' и Tx соответствующей последовательности информационных импульсов, формируемых за один цикл измерения. Из этого следует, что для обеспечения соответствия показаний счетчика 12 реальному значению контролируемого расстояния lx количество m регистрируемых информационных импульсов 34-36 за один цикл измерения должно отличаться от количества n информационных импульсов 31-33 на единицу. Это достигается выбором базового расстояния lo и длительности импульсов 34-36, при которой бы обеспечивалось срабатывание логического элемента И 11 и при незначительных несовпадениях во времени передних фронтов импульсов 34 и 37. В результате контролируемое расстояние lx будет выражаться в базовых отрезках lo, т.е. соответствовать величине mlo.
На фиг.2 приведен второй вариант схемы электронного блока 4, позволяющий сократить время проведения нулевого цикла до значения одного периода T' следования акустических импульсов, зондирующих расстояние l', равное сумме расстояний lx и lo. По сравнению с первым вариантом в состав блока 4 включен третий электронный ключ 14, работа которого заключается в следующем.
При включении блока 4 генератор 7 находится в режиме ожидания, а генератор 8 вырабатывает электрический сигнал для возбуждения ультразвукового преобразователя 3, излучающего зондирующий расстояние l' импульс 40 (фиг.5). Спустя время T', переотраженный объектом 13 импульс 40 возвратится к второму преобразователю 3, сигнал от которого через ключ 6 поступит на вход усилителя 10, формирующего стандартный импульс 34. С выхода усилителя 10 импульс 34 поступит на вход генератора 8 и через открытый в исходном состоянии третий электронный ключ 14 на вход генератора 9. В результате зондирующие импульсы 28 и 31 сформируются одновременно. При этом импульс 34 своим передним фронтом через логический элемент И 11 сбросит показания счетчика 12 и подтвердит открытое состояние ключа 14, а своим задним фронтом закроет данный ключ. Т. е. в начале первого цикла измерения третий электронный ключ 14 закрывается информационным импульсом 34. В начале же второго и последующих циклов ключ 14 будет закрываться информационным импульсом 38, опережающим импульс 35 на время, пропорциональное величине базового расстояния lo, и тем самым будет блокировать вход генератора 7 и первый вход логического элемента И 11 от информационных импульсов второй последовательности.
С целью обеспечения контроля уровня жидких сред, например, воды в резервуарах систем водоснабжения, акустический датчик устройства для реализации способа предлагается выполнить в виде двух труб 16 и 17, закрепленных на вертикальном штуцере резервуара 18 (фиг. 3). Данные трубы имеют по одному вертикальному и одному горизонтальному участку. Равные по длине вертикальные участки снабжены поплавками 19 и 20, дублирующими своим пространственным положением оси L изменения уровня lx воды, поверхность 13 которой играет роль контролируемого объекта 13 схемы на фиг.1. Горизонтальные участки труб 16 и 17 отличаются по длине на величину базового расстояния lx. Они снабжены цилиндрическими пьезопреобразователями 2 и 3, помещенными в корпусе 21. Вода в трубы 16 и 17 поступает через торцы их горизонтальных участков. Поплавки 19 и 20 в конструкции датчика 1 предусмотрены для снижения потерь при переотражении акустических импульсов от поверхности 13 контролируемой жидкости. Это позволяет обеспечить контроль уровня воды в резервуарах, достигающих в высоту десяти и более метров, или производить зондирование контролируемого расстояния lx менее мощными преобразователями.
Таким образом, предлагаемый способ позволяет производить измерения без формирования последовательности счетных импульсов и периодически сопровождаемой этот процесс корректировки значения их частоты следования, и тем самым упростить способом.
Кроме того, конструкция акустического датчика устройства, реализующего предлагаемый способ, обеспечивает отвод вторых лучей двухлучевых ультразвуковых преобразователей в сторону от контролируемого объекта и, тем самым, исключает возникновение помех, влияющих на точность (достоверность) измерения.
Использование: контроль уровня воды в резервуарах систем водоснабжения. Сущность изобретения: организуют автоциркуляцию акустических импульсов, зондирующих контролируемое расстояние, для формирования первой последовательности информационных импульсов, организуют автоциркуляцию акустических импульсов, зондирующих расстояние, равное сумме базового и контролируемого расстояний, для формирования второй последовательности информационных импульсов. Контролируемое расстояние определяют по количеству информационных импульсов второй последовательности, регистрируемых в интервале времени между двумя моментами одновременного формирования информационных импульсов соответственно первой и второй последовательностей. Устройство содержит акустический датчик, включающий два ультразвуковых преобразователя, первые лучи двухлучевых диаграмм направленности которых ориентированы вдоль направления на контролируемый объект, а вторые лучи - в противоположных друг другу направлениях с установкой преобразователей вдоль контролируемого расстояния со смещением относительно друг друга на базовое расстояние, и электронный блок формирования выходного сигнала, состоящий из двух контуров автоциркуляции зондирующих импульсов, логического элемента И и электронного счетчика. Акустический датчик может быть размещен на вертикальном штуцере резервуара с контролируемой жидкостью и выполнен в виде двух труб с равными по длине вертикальными участками и отличающимися по длине на величину базового расстояния горизонтальными участками, а преобразователи выполнены в форме цилиндров и по одному установлены на стенках горизонтальных участков труб на равном расстоянии от их торцов, а вертикальные участки труб снабжены поплавками, по одному размещенными в каждой трубе, соединенной с резервуаром через торец горизонтального участка трубы. 2 с.и. 2 з.п. ф-лы, 5 ил.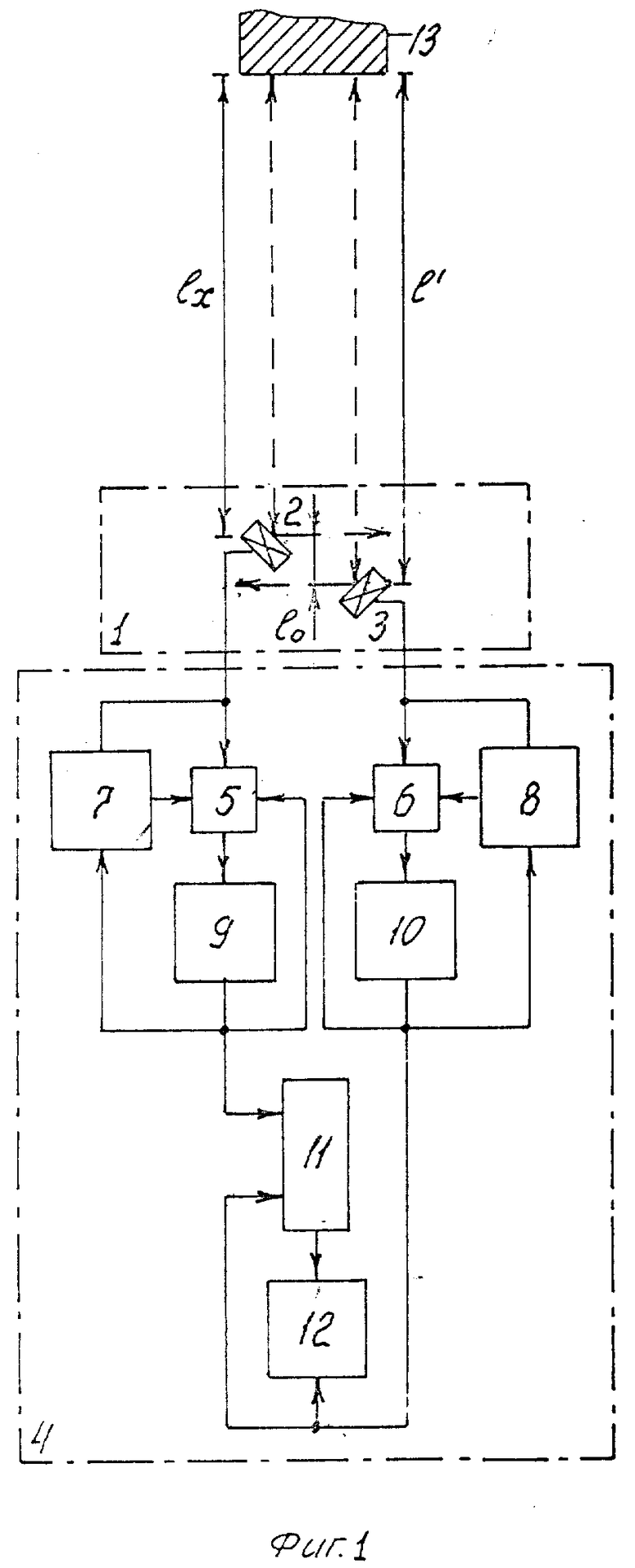
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1048322, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1180691, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
