Изобретение относится к устройствам для имитации движения транспортного средства, преимущественно летательного аппарата, и может быть применено для обучения и в качестве развлечения.
В типичных устройствах имитации полета летательного аппарата (самолета) пилот-стажер сидит в макете кабины летчика и рассматривает изображение, видимое ему через окна кабины. Часто макет кабины летчика установлен на подвижной платформе для того, чтобы можно было имитировать физические эффекты движения летательного аппарата и дополнить имитацию движения самолета (летательного аппарата) присутствием визуального изображения. Обычно макет кабины летчика опирается на устойчивую платформу, которая сама поддерживается шестью гидравлическими домкратами. Гидравлические домкраты связаны с тремя шарнирами на нижней стороне платформы и с тремя шарнирами на опорной станине под платформой. Таким образом, каждая платформа связана с двумя домкратами, которые, в свою очередь, соединены с соответствующей парой шарниров опорной станины. Эта известная система домкратов обеспечивает шесть степеней свободы и является промышленным стандартом для опорных систем подвижных платформ.
Для пользования в имитаторах летательных аппаратов предлагались различные визуальные системы. В основном, эти визуальные системы могут подразделяться на два типа это неколлимирующие и коллимирующие.
В неколлимирующих системах изображение, которое должен рассматривать пользователь устройства имитации, проецируется на экран или купол, размещенный перед макетом кабины летчика. Поверхность экрана обычно расположена в 3 6 м от глаз пользователя имитатора (тренажера), и поэтому такие системы не дают идеального изображения отдаленных объектов. Неколлимирующие системы, однако, часто используются, когда требуется очень широкое поле зрения, так как трудно проецировать изображение с очень широким полем зрения, используя коллимирующие системы. Неколлимирующие системы также иногда полезны при имитации вертикального взлета самолета, когда это необходимо для обучения и тренировки пилотов маневрированию на очень низких высотах. В таких условиях короткое расстояние между экраном и глазами пользователя не является основным недостатком.
В коллимирующих системах пользователь присутствует в изображении, которое кажется безграничным. В одном из типов широко используемой коллимирующей системы окна макета кабины летчика перекрыты с помощью приспособления телевизионного монитора, включающего расщепители луча, так что лучи света от телевизионного монитора отражались в частично отражающем зеркале к вогнутому зеркалу и от вогнутого зеркала обратно через частично отражающее зеркало в глаза пользователя. Такие приспособления передают соответствующие изображение только для одного положения пользователя и поэтому не идеальны для имитации многоместной кабины, как это требуется, например, для широкофюзеляжных реактивных самолетов. Они используются в этих случаях, однако отмечается факт, что только два пользователя, сидящих бок о бок, принимают соответствующее изображение через окна непосредственно перед ними и сбоку. Пользователь, смотрящий в сторону переднего или бокового окна на другой стороне кабины, либо видит очень искаженное изображение, либо вообще не видит его.
Известны коллимирующие широкоугольные визуальные системы, в которых исключены вышеупомянутые проблемы изображения поперек кабины. В таких системах изобретение проецируется на задний проекционный экран, расположенный над макетом кабины, и рассматривается через вогнутое зеркало, расположенное перед кабиной. Зеркало находится обычно в двух-трех метрах впереди кабины, но тем не менее дает изображение, которое кажется безграничным. Такими системами теперь являются большинство серийных систем имитации полета самолета (тренажерных), но они не являются идеальными для имитации военных самолетов, так как поле зрения в военных самолетах обычно во много раз больше, чем в гражданских самолетах.
Вышеупомянутые проблемы ограниченного поля зрения можно, конечно, преодолеть увеличение купола зеркала, представляющего поверхность, непосредственно видимую пользователем. Если макет кабины летчика стационарный, это довольно легко обеспечить, но если макет кабины смонтирован на подвижной системе, размеры и вес купола и зеркала становятся главной проблемой, так как они тоже должны быть установлены на подвижной системе для поддерживания необходимой геометрии визуальной системы.
Вышеупомянутая промышленная стандартная система с подвижной платформой обычно содержит платформу, смонтированную на шести гидравлических приводах или домкратах, каждый из которых имеет длину хода (размах) около 1,5 м.
Известно техническое решение (прототип), в котором для разрешения проблем, присущих визуальным системам с большим полем зрения (обзором) на подвижной платформе, предложено смонтировать макет кабины на первой подвижной платформе и дисплейный экран в виде купола на второй подвижной платформе. Это предложение было раскрыто в докладе "Satisfactory Visual and Motuin Cueing for Helicopters/ VSTOL Simulation", С.Секстона, О.Бачбиджа и и докт. М. Робертса из Rediffusion Simulation Society, May 1990. Этот доклад был представлен Королевскому Воздухоплавательному Обществу в мае 1990 г. В этом решении макет кабины летчика смонтирован на известной подвижной с шестью степенями свободы системе, опирающейся на наклонную поверхность, и купол смонтирован на идентичной второй известной подвижной системе, установленной на передней наклонной поверхности. Преимуществом такого размещения является, во-первых, то, что купол может простираться под макет кабины, так что возможно имитировать изображение, релевантное процедурам приземления вертолета, и, во-вторых, то, что механическая нагрузка на макет кабины подвижной системы уменьшена за счет переноса конструкции купола на вторую подвижную систему. В раскрытой конструкции купол, по существу, сферический и расположен так, что подвижная система, поддерживающая купол, должна вращаться вокруг глаз пользователя в макете кабины, в соответствии с движениями макета вокруг глаз пользователя, если нижний край полусферы остается вне поля зрения пользователя. Следовательно, относится небольшое вращение макета кабины вокруг глаз пользователя может вызвать необходимость такого вращения купола вокруг глаз поддерживающей его подвижной системой, чтобы края купола проходили значительное расстояние. Например, если расстояние от купола до глаз порядка 5 м при угле вращения 18o вокруг точки глаз, то необходимо расположить край полусферы более чем в 1 м. Ясно, что такое размещение не может быть осуществлено достаточно быстро при использовании стандартных узлов подвижных систем, обусловленных большими размерами блоков дисплейных систем. Следовательно, ходя описанная в вышеупомянутом докладе система предложена как теоретическое решение проблемы, связанной с обеспечением интегрированного большого поля зрения (обзора), визуальная и подвижная системы никогда не могут быть осуществлены.
В том же докладе предложено альтернативное теоретическое решение, включающее обеспечение вторичными широкоугольными коллимирующими дисплеями, установленными независимо от подвижной системы, обеспечение очень большим неподвижным куполом, простирающимся вокруг подвижной платформы, и установку макета кабины летчика внутри поддерживающей известную подвижную платформу системы так, что макет кабины летчика может наклоняться относительно этой подвижной платформы.
Задачей, положенной в основу настоящего изобретения, является устранение или смягчение вышеуказанных проблем.
На фиг. 1 дано схематическое изображение стационарной визуальной системы в соответствии с известными, пригодными для вертолетов или VSLOL-тренажерами (имитаторами); на фиг. 2 известная стационарная визуальная система для представления очень широкого поля зрения (обзора); на фиг. 3 известная, установленная на подвижной платформе визуальной системы, включающая задний проекционный экран, рассматриваемый через сферическое зеркало; на фиг. 4 - основные узлы подвижной системы, показанной на фиг. 3; на фиг. 5 размещение гидравлических приводов подвижной системы, показанной на фиг. 4; на фиг. 6 - известная система, в которой макет кабины установлен на одной подвижной платформе, а рассматриваемый купол установлен на второй подвижной платформе; на фиг. 7 первый вариант настоящего устройства; на фиг. 8 12 различные виды устройства по второму варианту настоящего изобретения; на фиг. 13 - третий вариант настоящего изобретения; на фиг. 14 четвертый вариант настоящего изобретения; на фиг. 15 блок-схема системы управления любым описанным вариантом изобретения.
На фиг. 1 изображен известный тренажер (имитатор) с фиксированным куполом 1, радиус которого может быть от 3 до 6 м и который расположен вокруг стационарного макета кабины 2 летчика. Проекторы, обычно от 3 до 5, расположены в корпусе 3 так, чтобы проецировать изображение информации на внутреннюю поверхность купола. Внутренняя поверхность купола, рассматриваемая пользователем, находящимся в макете кабины 2, за исключением площади купола, занятой проекторами, может иметь изображение, проецируемое на нее, и, следовательно, пилоту-стажеру может быть представлено широкое поле зрения (обзора). Макет кабины, однако, стационарный или самое большее подвержен вибрации, и соответственно пользователь не может принимать сигналы движения. В основном, это снижает реализм имитации.
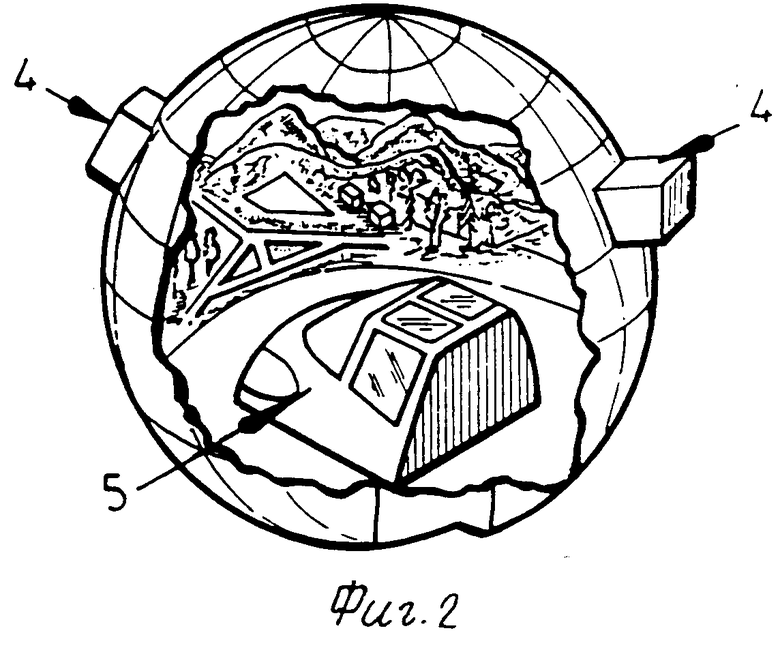
Известное расположение (фиг. 2) в основном очень похоже на расположение по фиг. 1, за исключением того факта, что проекторы распределены вокруг наружной поверхности купола.
Изображено два проектора 4, смонтированных на куполе. Каждый проектор проецирует пучок света через очень маленькую апертуру (известную как pin hole булавочное отверстие) в куполе, и поэтому может быть получено все окружающее поле зрение. Такое расположение удобно для имитирования, например, самолета-истребителя, в котором пилот размещается под прозрачным фонарем кабины, дающим неограниченное поле зрение вверх и на 360o вокруг самолета. Однако пилот-стажер снова сидит в кабине 5, которая либо стационарна, либо самое большее подвержена вибрации.
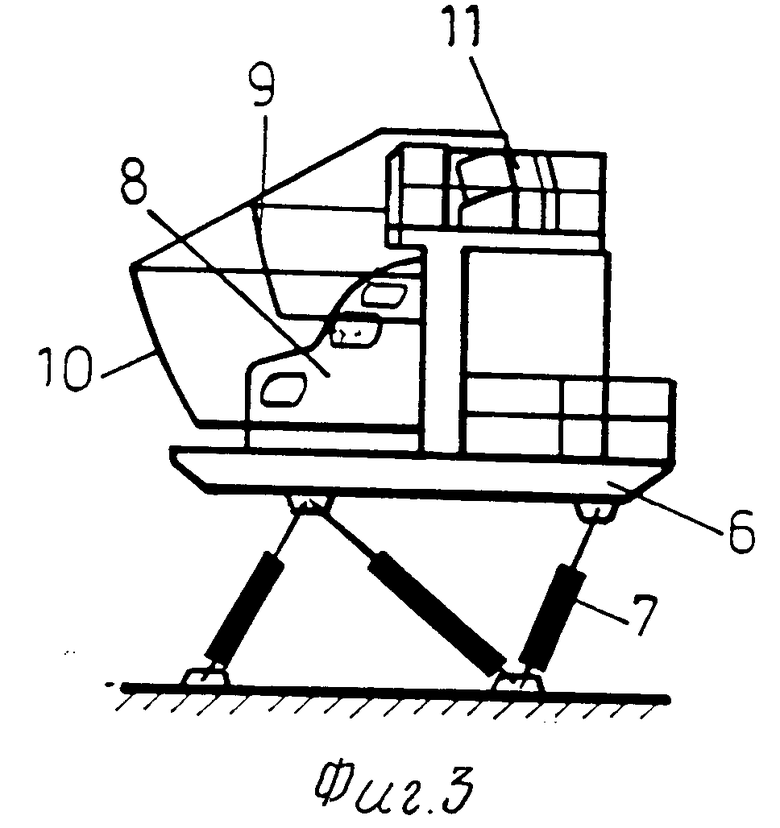
Фиг. 3 иллюстрирует известную подвижную систему тренажера (имитатора), в которой подвижная платформа 6 расположена на ряде из трех пар гидравлических приводов 7. Тренажер (имитатор) содержит макет кабины 8 летчика, задний проекционный экран 9, расположенный над макетом кабины, сферическое зеркало 10 и ряд проекторов 11, которые создают изображение на экране 9. Такое расположение дает полностью коллимированное изображение, но поле зрения (обзор) в вертикальном направлении ограничен обычно порядка 40o. Теоретически поле зрения (обзор) может растянуто путем увеличения размера зеркала 10 и смещения и расширения заднего проекционного экрана 9, но полученная конструкция будет очень большой, что приведет к увеличению массы и инерции подвижной системы. Чем больше масса и инерция системы, тем не менее подвижной и быстрой становится подвижная система.
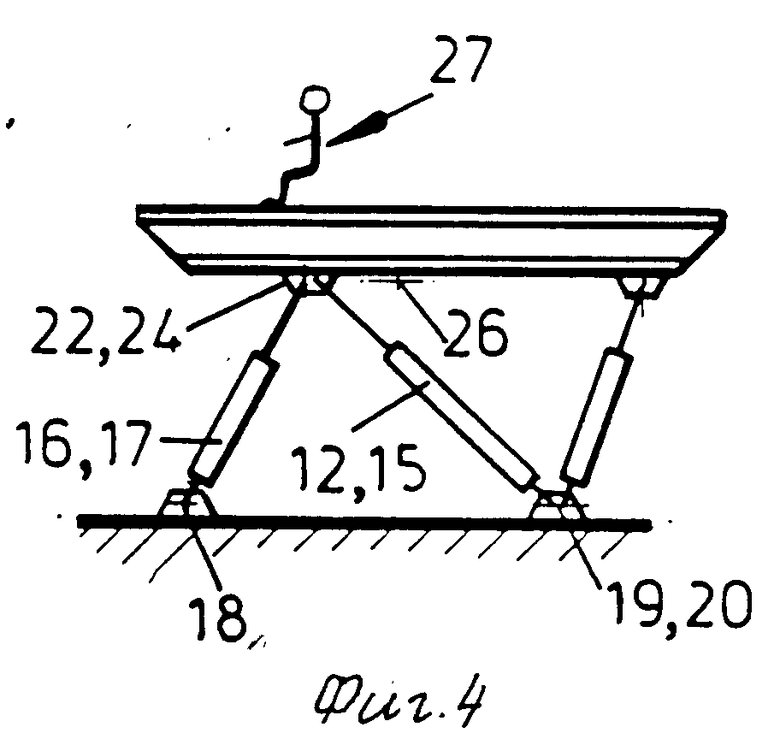
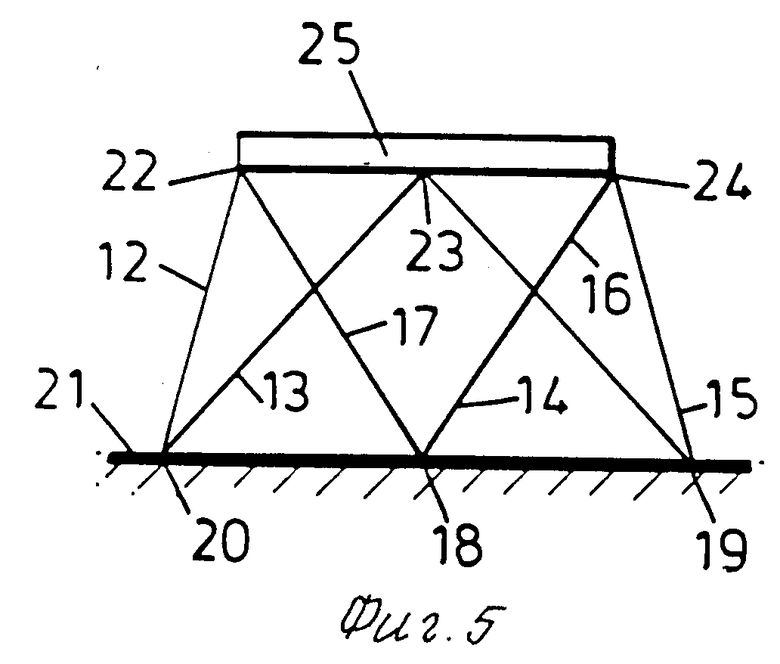
В соответствии с фиг. 4 т 5 описаны основные узлы стандартной с шестью степенями свободы подвижной системы обычного типа. Шесть приводов 12, 13, 14, 15, 16, 17 присоединены к трем осям 18, 19 и 20 вращения, которые надежно закреплены на опорной площадке 21. Верхние концы приводов присоединены к осям 22, 23 и 24 вращения, закрепленным на нижней стороне подвижной платформы 25. Центроид движения системы обычно будет расположен в точке, отмеченной крестом 26, находящейся ниже и позади положения пилота-стажера, которое обозначено позицией 27. Поступательные смещения (перемещения) (вертикальные, продольные или поперечные) и вращательные смещения (наклон, вращение и рыскание) определяются относительно центроида подвижной системы и оси через центроид. Поэтому тангаж (продольное движение) платформы вокруг центроида движения приведет к вертикальному и продольному перемещению (смещению) позиции наблюдения и вращательному перемещению позиции наблюдения.
В обычных системах вышеописанного типа в соответствии с фиг. 1 5 либо и позиция наблюдения, и визуальная система стационарны, либо и позиция наблюдения, и визуальная система двигаются вместе на одной и той же платформе.
Теоретически поле зрения (обзор), закрепленное на подвижной платформе визуальной системы, можно сделать настолько большим, насколько это необходимо, путем монтирования всех блоков визуальных систем на подвижной платформе. Например, в теории такое устройство, как показано на фиг. 2, может быть смонтировано на подвижной платформе. На практике масса и инерция такого устройства будут настолько велики, что нагрузка на приводы сделает невозможным быстрое перемещение подвижной массы. Соответственно, хотя теоретическая возможность закрепления такой системы, как показано на фиг. 2, на подвижной платформе и обсуждалась, она была отклонена как непрактичная.
Для устранения проблем механической нагрузки, связанных с крупными узлами визуальных систем, было предложено предусмотреть две подвижные платформы одну, поддерживающую макет кабины летчика, и вторую, поддерживающую такой крупный компонент визуальной системы, как купол.
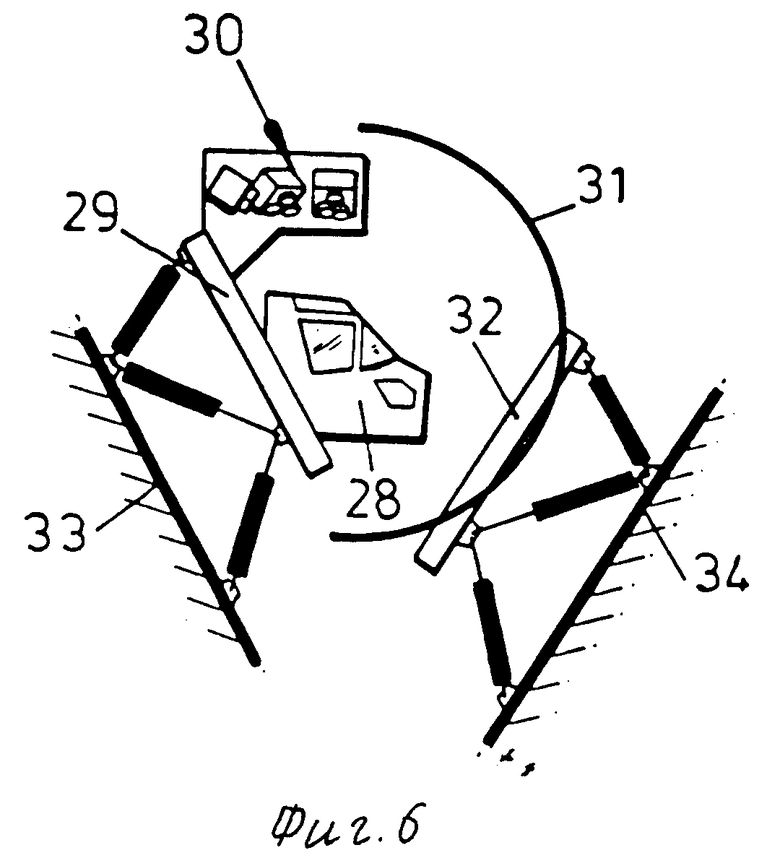
Устройство такого типа показано на фиг. 6, из которой видно, что макет кабины 28 летчика закреплен на подвижной платформе 29, которая также поддерживает проекторы 30.
Купол 31 закреплен на второй подвижной платформе 32. Одна подвижная платформа закреплена на наклонной поверхности 33, и вторая на противостоящей наклонной поверхности 34. Это делает возможным протянуть купол под макет кабины и приспособить его для имитации вертолета.
Следует, однако, отметить, что купол 31 нисходящее от макета кабины 29 летчика поле зрения (обзор) ориентированное к подвижной платформе 29, как показано. Поэтому ясно, что купол 31 должен прослеживать все движения макета кабины 28 летчика и поступательные, и вращательные, для того, чтобы поддерживать купол так, чтобы он накрывал все предназначенное для пилота-стажера поле зрения. Например, вращение макета кабины 28 вокруг позиции наблюдения (точки глаз пилота-стажера в направлении продольно вниз (pitch down) не приводит к перемещению или смещению, но будет вводить нижний край купола 31 в поле зрения до тех пор, пока купол 31 сам вращается вокруг позиции наблюдения. Результат этого выражается в том, что купол 31 должен быть способен делать очень большие движения в соответствии с вращениями (поворотами) макета кабины вокруг позиции наблюдения (точки глаз) пилота-стажера. Поэтому хотя система на фиг. 6 снижает механическую нагрузку на первую подвижную платформу 29, перемещение купола 31 трудно обеспечить.
Кроме того, хотя закрепление двух подвижных платформ на противостоящих наклонных поверхностях теоретически возможно, трудно рассматривать практическую систему, обусловленную размерами и весом различных узлов. Нагрузки на пол, прилагаемые подвижной платформой, очень велики, и наклонные опоры типа показанных на фиг. 6 должны иметь массивную конструкцию.
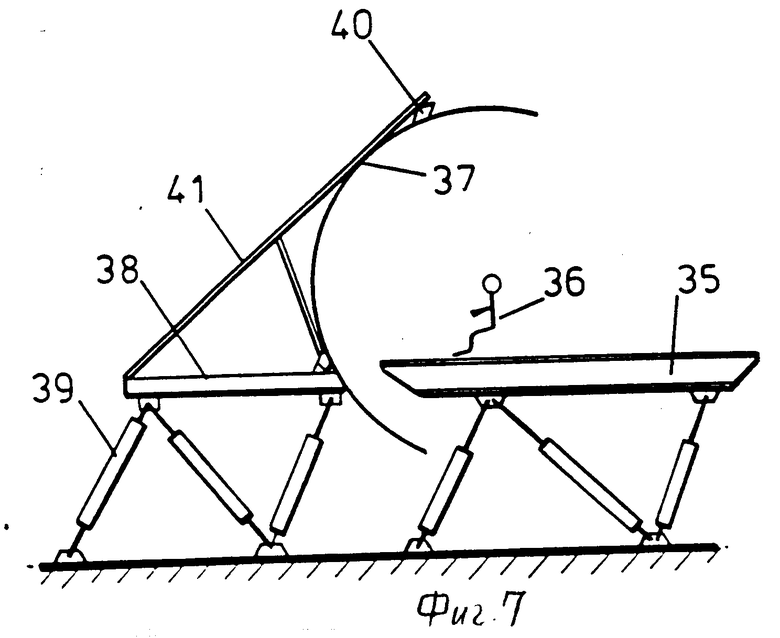
На фиг. 7 показан первый вариант настоящего изобретения. Подвижная платформа 35 стандартного типа поддерживает макет кабины летчика (не показан), внутри которой сидит пилот-стажер, обозначенный позицией 36. Проекционные устройства (не показаны) закреплены на платформе 35 и проецируют изображение, рассматриваемое пилотом-стажером, на куполе 37, поддерживаемом второй подвижной платформой 38, закрепленной на гидравлических приводах 39. Гидравлические приводы 39 обычного типа.
Купол 37 установлен так, что для точного воспроизведения изображения центр купола должен быть совмещен с позицией наблюдения (точкой глаз) пилота-стажера. Платформа 38, однако, управляется так, что она всегда, по существу, горизонтальна, невзирая на позицию платформы 35. Посредством управления купол вынужден перемещаться так, что его центр всегда совпадает с предназначенной для пилота-стажера позицией наблюдения. Поэтому купол достаточно велик, чтобы его периметр всегда был за пределами поля зрения пилота-стажера, не взирая на вращения (повороты), которые могут быть приложены к платформе 35. Например, если платформа 35 наклоняется в нисходящем направлении так, что нет поступательного перемещения позиций наблюдения пилота, то купол 37 вообще не будет двигаться. Изображение, проецируемое проекторами, закрепленными на платформе 35, будет просто проходить по сферической поверхности, определяемой куполом 37, но не будет эффекта восприятия настолько, насколько это касается пилота-стажера.
Поэтому в случае варианта на фиг. 7 движения купола 37 относительно ограничены и легко управляются. Просто необходимо рассчитывать заданное положение позиции наблюдения и применить оригинальную серию управляющих входных сигналов для шести приводов 38, чтобы купол принял соответствующее положение. Подвижная система 35 не должна выдерживать нагрузку купола 37 и может, следовательно быстро двигаться.
Купол 37 не должен сам двигаться в ответ на вращения (повороты) вокруг глаз пилота и, в основном, относительно медленные перемещения купола 37 это все, что требуется.
В устройстве на фиг. 7 две подвижные системы расположены одна против другой. Это требует очень большого пространства. Кроме того, купол 37 должен поддерживаться так, чтобы простираться на значительное расстояние от одной стороны поддерживающей его платформы, делая необходимым установку конструктивной опорной системы, как, например опорного кольца 40, на объемную раму 41, как схематически показано на чертеже.
Более удовлетворительное устройство, которое также может обеспечить широкое поле зрения, показано на фиг. 8.
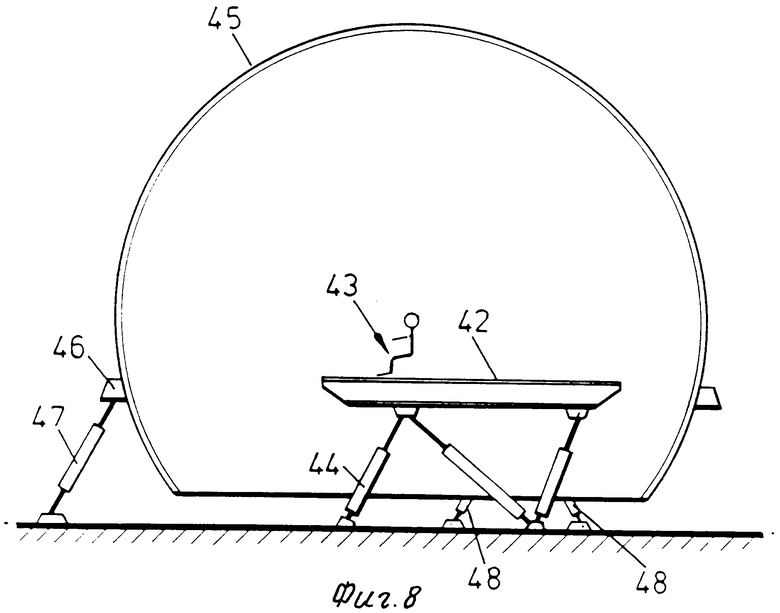
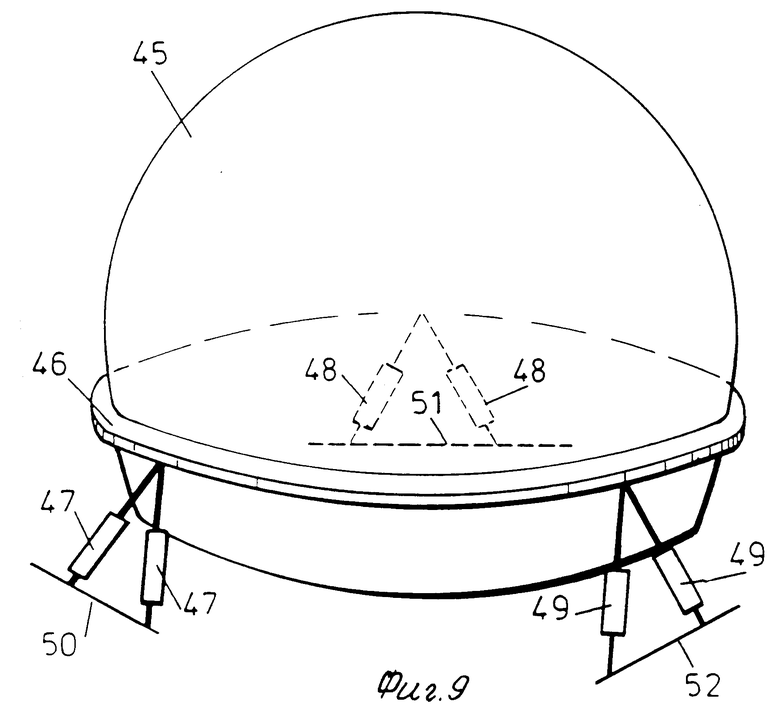
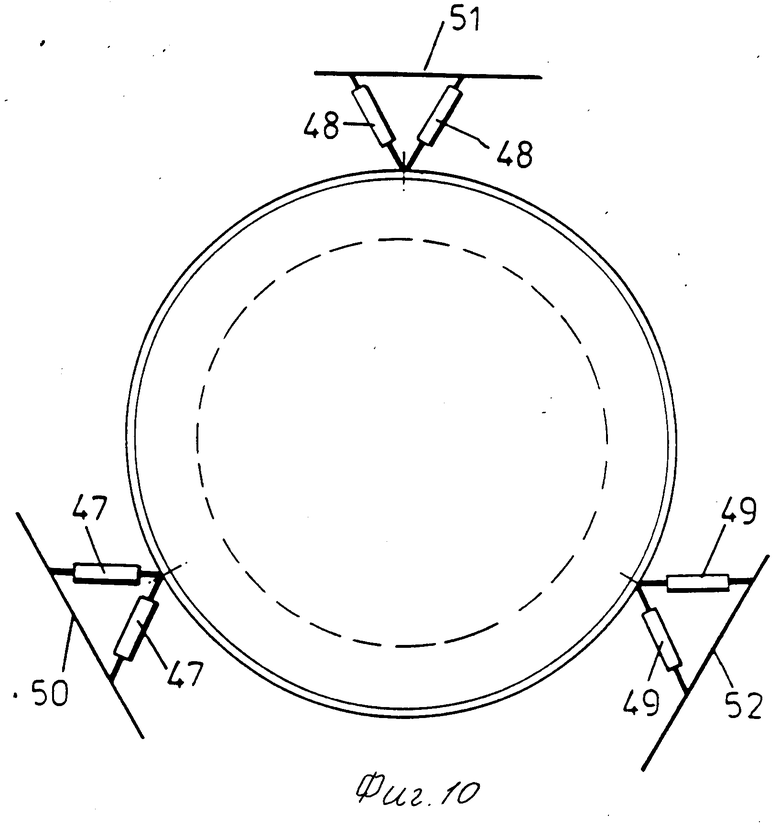
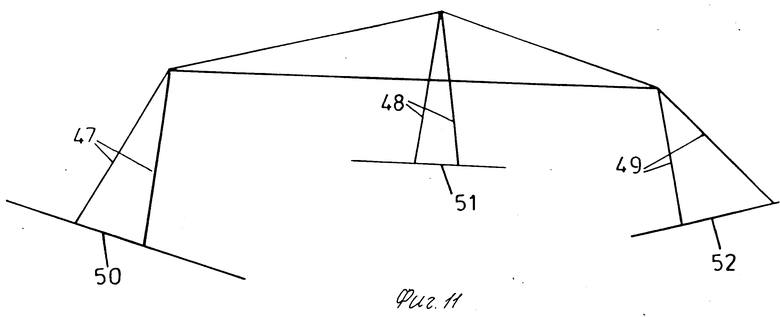
На фиг. 8 12 изображен второй вариант изобретения. В этом втором варианте обычная первая подвижная платформа 42, поддерживающая пилота-стажера, обозначенного позицией 43, установлена на обычном устройстве из 6 гидравлических приводов 44. Расположенный вокруг первой подвижной платформы купол 45 установлен на кольце 46, поддерживаемом тремя парами гидравлических приводов 47, 48 и 49. Нижний конец каждого привода соединен с соответствующим закрепленным на полу шарниром или осью вращения, и верхние концы каждой пары приводов присоединены к общему шарниру или оси вращения, закрепленной на кольце 46. Для упрощения чертежа конструкция этих шарниров не показана. Следует отметить, что горизонтальные линии 50, 51 и 52, проведенные через нижние шарниры пары приводов, перемещены радиально наружу от стенок купола так, чтобы когда купол находится в его исходном неподвижном положении, как показано на фиг. 12 пунктирной линией и на фиг. 10 сплошной линией, все пары приводов наклонялись внутрь. Опорная система поэтому содержит три опорных треугольника, каждый из которых соединен с кольцом, которое можно рассматривать как определяющее дополнительный треугольник конструкции, как показано на фиг. 11.
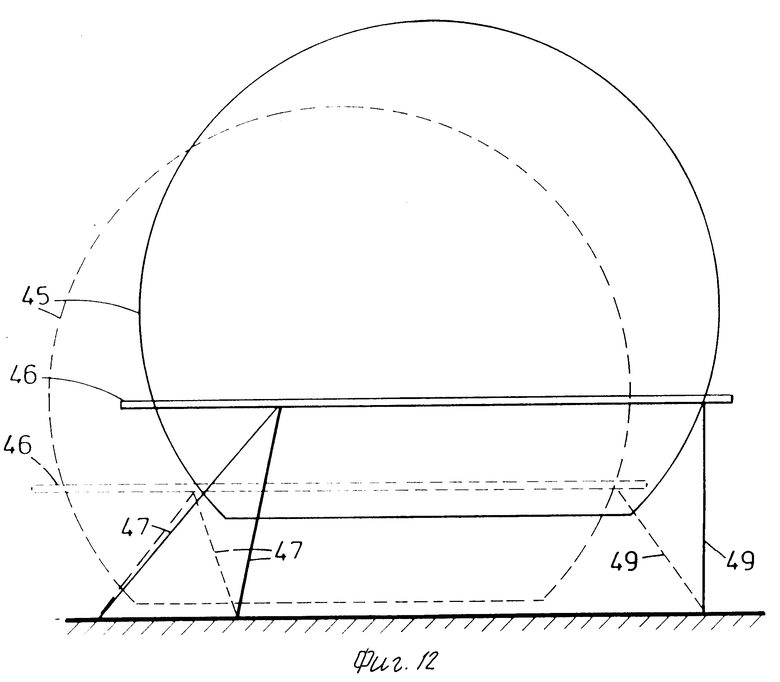
На фиг. 12 сплошной линией показан купол 45 в смещенном положении, так что приводы 49, по существу, вертикальны. Следует отметить, однако, что кольцо 46 остается, по существу, горизонтальным. Поэтому хотя если нужно, то возможно поворачивать купол 45, нет необходимости предусматривать вертикальные и горизонтальные перемещения, которые можно согласовать посредством приводов, так чтобы обеспечивать совпадение центра сферического купола 45 с точкой глаз пилота-стажера, поддерживаемого первой (внутренней) подвижной платформой 42.
Хотя в устройстве, изображенном на фиг. 8 12, линии 49, 50 и 51 смещены наружу относительно купола, это не является необходимым положением, и, действительно, приводы могут даже в неподвижном положении купола проходить наружу от пола (площадки) вверх к кольцу 46. Необходимо, однако, принять меры предосторожности, чтобы гарантировать, что при таком расположении приводов нижняя часть купола не заблокируется.
Таким образом, устройства на фиг. 8 12 могут представить пилоту-стажеру изображения, покрывающие очень широкое поле зрения (обзор). Кроме того, система относительно компактна, так как купол 45 опирается на подвижную систему, которая простирается вокруг внутренней подвижной системы, на которой сидит пилот-стажер. Купол может быть приспособлен таким образом, что когда приводы не исключены, он просто садится на поверхность опорной площадки. Доступ во внутреннюю часть купола может быть через простой проход, вырезанный в поверхности опорной площадки.
В устройствах на фиг. 8 12 нисходящее поле зрения ограничено тем, что купол и подвижная платформа смонтированы на одной поверхности, и подвижная платформа не может двигаться под эту поверхность.
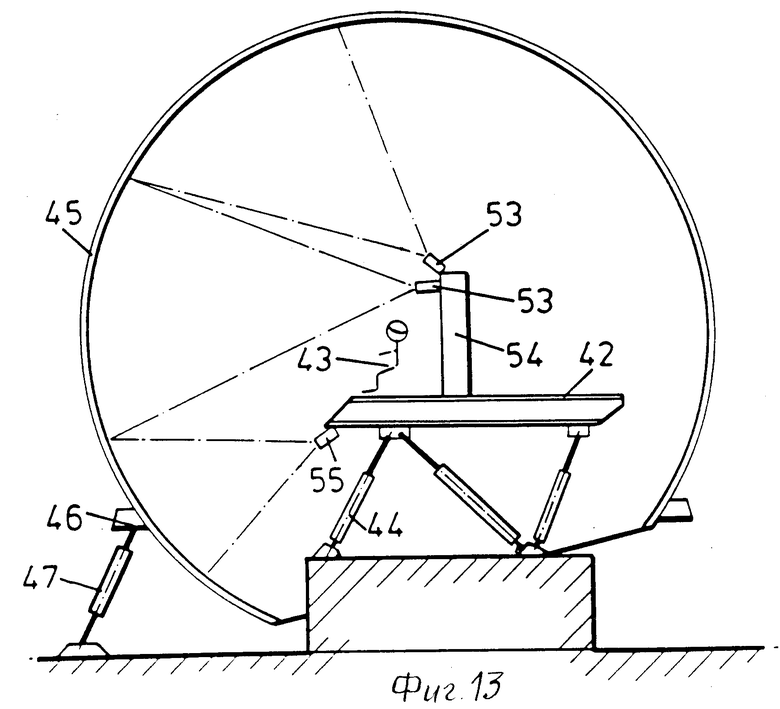
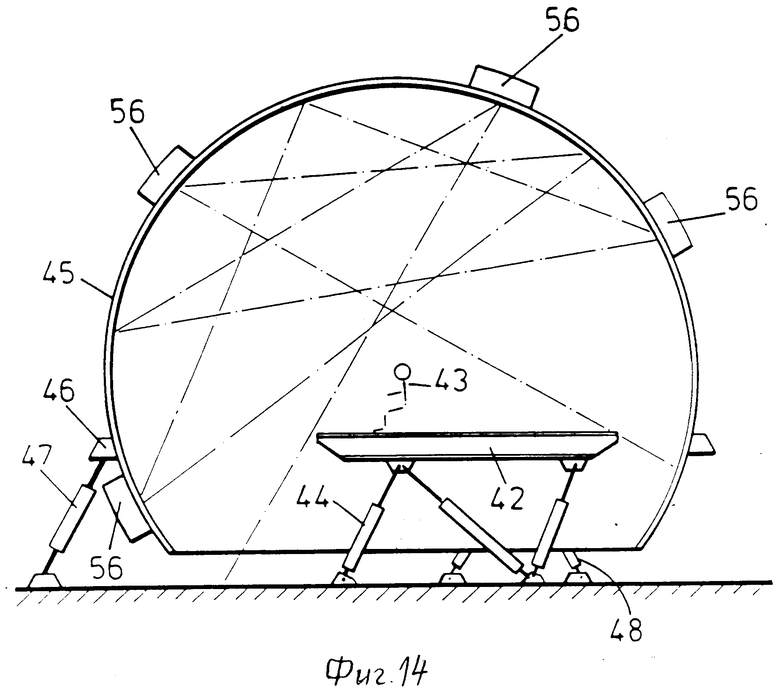
Нисходящее поле зрения (обзора) можно, однако, легко растянуть, поддерживая подвижную систему пилота-стажера на цоколе, расположенный внутри купола, как показано на фиг. 13. На фиг. 13 использованы те же номера позиций для тех же узлов, что и на фиг. 8. В устройстве на фиг. 13 также схематично показаны проекторы 53, установленные на подходящей опоре 54 позади пилота-стажера. Такое расположение проекторов было рассмотрено в устройствах типа изображенных на фиг. 8 12. В случае фиг. 13, однако, предусмотрены дополнительные проекторы 55 под подвижной платформой, с тем чтобы растянуть площадь купола, на которую можно проецировать изображение. Таким образом можно поучить широкое поле зрения и очень хорошее нисходящее поле зрения. Большая часть купола позади пилота не несет информационного изображения, но тем не менее предусмотрена по чисто конструктивным соображениям. Если, однако, желательно дать пилоту возможность видеть позади него, как это желательно в тренажерах (имитаторах) самолетов-истребителей, можно обеспечить такое расположение, как показано ни фиг. 14, причем нумерация позиций одних и тех же элементов соответствующая. В случае фиг. 14 купол 45 поддерживает ряд проекторов 56, каждый из которых проецирует пучок света через булавочное отверстие в куполе. При соответствующем рассредоточении проекторов можно поддерживать, по существу, любое требуемое поле зрения.
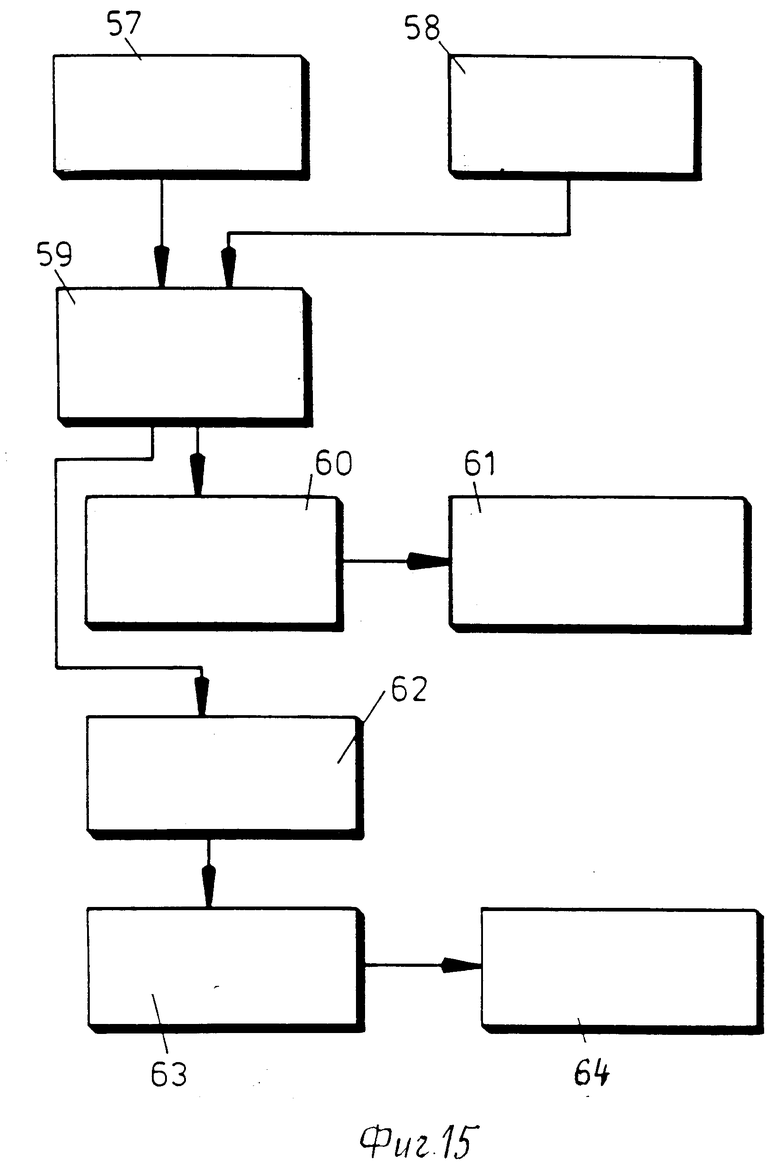
На фиг. 15 схематично изображена система управления, используемая в любом из описанных вариантов настоящего изобретения. Основным в системе управления является то, что купол приспособлен прослеживать перемещения (смещения), но не вращение (повороты) позиции наблюдения пользователя. Поэтому пользователь, например пилот-стажер, манипулирует рычагами 57 управления, на которые тренажер легко реагирует. В дополнение к этому инструктор может манипулировать рычагами 58 управления, чтобы воздействовать на тренажер для усиления обучения пилота.
Из этих управляющих входных сигналов компьютерная система 59 рассчитывает обычным образом требуемое пилоту-стажеру движение. Как только это движение рассчитано, привод 60 первой подвижной системы заставляет известным путем управлять движением первой подвижной системы 61, на которой сидит пилот-стажер. Далее система полностью известная. В соответствии с изображением, однако, компьютер 62 рассчитывает положение позиции наблюдения пилота-стажера обусловленное движением пилота, которое требуется управляющим входным сигналом. Исходя из этого рассчитанного положения позиции наблюдения пилота-стажера, выдается выходной управляющий сигнал, который вынуждает привод 63 второй подвижной системы приводить в движение приводы 64 подвижной системы, которые поддерживают купол. Поэтому привод купола может быть полностью независимыми от поворота позиции наблюдения пилота, давая преимущество в том, что эти повороты не влияют на восприятие изображения, обусловленное тем, что изображение просто проходить по сферической внутренней поверхности купола.
Понятно, что хотя в описанных вариантах изобретения рассматриваемое изображение проецируется на купол, можно, например, поддерживать сферическое зеркало коллимирующей визуальной системы таки же образом, как это описано для сферического дисплейного купола.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПАКТНАЯ СИСТЕМА РАЗДЕЛЬНОЙ ВИЗУАЛИЗАЦИИ ЗОН ПЕРИФЕРИЧЕСКОГО ЗРЕНИЯ И ЗОНЫ ЯСНОГО ЗРЕНИЯ ПОЛЬЗОВАТЕЛЯ В ТРЕНАЖЕРЕ | 1998 |
|
RU2152079C1 |
| ПИЛОТАЖНЫЙ ТРЕНАЖЕР НА ОСНОВЕ ЦЕНТРИФУГИ | 2012 |
|
RU2591108C2 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Авиационный симулятор (авиасимулятор) самолета Boeing 737 | 2018 |
|
RU2688500C1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2230370C2 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2277725C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ДЛЯ ОПРЕДЕЛЕНИЯ ВИЗУАЛЬНЫХ РИСУНКОВ НА ВИЗУАЛЬНОЙ СЦЕНЕ | 2006 |
|
RU2425331C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
Использование: в устройствах для имитации движения транспортного средства, преимущественно летательного аппарата, и для обучения, и в качестве развлечения. Сущность изобретения: дисплейная поверхность является сферической и имеет протяженность, достаточную для перекрывания всего (предназначенного) поля зрения, не считаясь с вращением (поворотами), что может относиться к первой подвижной платформе. Не необходимости в слежении дисплейного экрана за вращением (поворотами) вокруг позиции наблюдения на подвижной платформе, поддерживающей макет кабины летчика. Представленное изображение проходит по дисплейной поверхности, в то время как имеющееся вращение не оказывает влияния на восприятие реализма проецируемого изображения. Нет необходимости в размещении дисплейного экрана на больших расстояниях для слежения за вращением (поворотами) подвижной платформы кабины, а лучше просто поддерживать геометрический центр дисплейного экрана в заданном положении относительно глаз наблюдателя, очерченном в пределах макета кабины летчика. 3 з. п. ф-лы, 15 ил.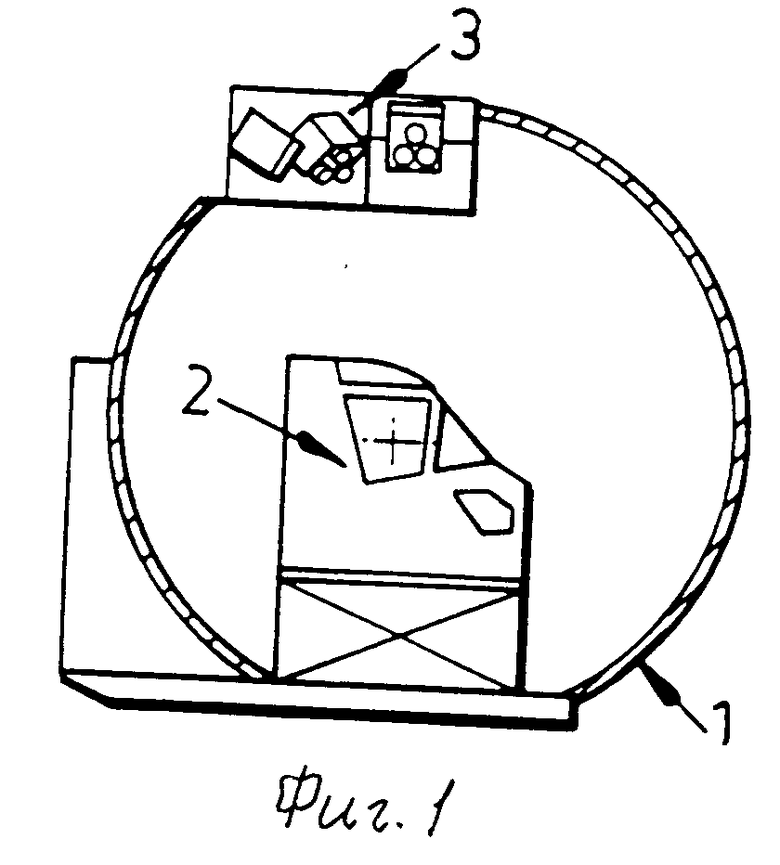
| Satisfactory Visual and Motion Cueing for Helicopters/VSTOL Simulation | |||
| С | |||
| Секстона, О | |||
| Бачбиджа и докт | |||
| М | |||
| Робертса из Rediffusion Simulation Society, 1990. |
