Предшествующий уровень техники настоящего изобретения
Пилотажные тренажеры используют в отрасли гражданской и военной авиации в качестве недорогой альтернативы реального полета, что позволяет летчикам получать драгоценный летный опыт.
Несмотря на то, что существует множество устройств, используемых для имитации условий полета, все эти устройства могут быть классифицированы как неподвижные и подвижные тренажеры.
В категории подвижных тренажеров наиболее широко известным устройством является платформа Гью - Стюарта, платформа с шестью СС («СС» обозначает «степени свободы») или платформа с шестью силовыми цилиндрами. Шестью степенями свободы являются вращение вокруг поперечной оси (движение тангажа), движение вокруг продольной оси (бочка), вращение вокруг вертикальной оси (движение рысканья), вертикальное перемещение, горизонтальное поперечное перемещение и горизонтальное продольное перемещение. Этот тип платформы представляет собой задающее движение устройство, поскольку оно позволяет летчику ощутить первоначальный эффект подъема или спуска, но из-за ограничений не может воспроизвести весь диапазон условий полета.
Другой тип подвижного тренажера представляет собой устройство для создания постоянной перегрузки (Continuous G Device или CGD), которое, как правило, характеризуется наличием следующих степеней свободы: вращение вокруг поперечной оси (тангаж), движение вокруг продольной оси (крен), вращение вокруг вертикальной оси (рысканье), а также наличием планетарного (циклического) движения, обеспечивающего создания постоянной перегрузки. По сути CGD представляет собой тренажер на основе центрифуги.
Со временем платформа с шестью степенями свободы стала стандартной и она необходима для соответствия так называемому уровню D стандарта для пилотажных тренажеров, который установлен контрольно-надзорными органами гражданской авиации, такими как Федеральное авиационное управление (FAA) в США и Европейское агентство по авиационной безопасности (EASA) в странах Европейского союза. Этот тип стационарного тренажера на основе платформы позволяет стажеру получить опыт пребывания в кабине самолета посредством визуального отображения обстановки полета с широким сектором обзора и высоким разрешением.
Эти тренажеры также стремятся воспроизвести акселерационную информацию (признаки движения) в результате применения системы движения с поршневым приводом, расположенной под платформой тренажера. Поршни обеспечивают различные углы наклона платформы тренажера, при этом перемещение штоков указанных поршней, как правило, ограничено некоторым диапазоном. Например, такие тренажеры не могут обеспечить наклон, выходящий за пределы +/-45 градусов вращения вокруг поперечной оси или +/-45 градусов вращения вокруг продольной оси. Кроме того, они не имеют возможности вызывать положительные или отрицательные перегрузки, осуществлять переворот вверх дном или вызывать физиологические стрессы у стажера.
Следовательно, главный недостаток таких стационарных тренажеров на основе платформы с шестью степенями свободы заключается в том, что они не могут воспроизводить ни полный диапазон (360 градусов) движений полета, ни вызывать воздействие перегрузок на летчика.
К сожалению, в большинстве катастроф, возникающих в гражданской авиации в результате потери управления самолетом (именуемой нештатной ситуацией), самолету присущи состояния, выходящие за пределы нормального режима полета, например, значения угла тангажа более 25 градусов при задранном носе; значения угла тангажа более 10 градусов при опущенном носе; значения угла крена более 45 градусов; а также увеличенные перегрузки, воздействующие на летный экипаж. Именно эти движения самолета совместно с увеличенными перегрузками часто приводят к возникновению дезориентирующих нагрузок на вестибулярный аппарат и органы осязания у летчика во время реальных условий полета.
Таким образом, даже если летчик обучается правильным действиям для выхода из ситуации, связанной с потерей управления, например, в случае нештатной ситуации в полете, летчик, который обучался только на стационарных тренажерах на основе платформы с шестью степенями свободы, может быть неспособен надлежащим образом осуществлять управление самолетом в реальных условиях, так как он или она не подготовлены для надлежащего реагирования при возникновении физиологического стресса, внешних нагрузок и дезориентирующих воздействий, которые, как правило, действуют на летчиков в условиях реального полета; в частности, в условиях полета, которые выходят за пределы нормального режима полета.
С другой стороны, тренажеры на основе центрифуги, как правило, способны предоставить стажерам все преимущества, присущие стационарным тренажерам на основе платформы с шестью степенями свободы, при этом они также способны воспроизводить все многокоординатные перемещения (для тангажа, крена или рыскания) совместно с фактическими повышенными перегрузками благодаря использованию планетарного движения. Следовательно, тренажеры на основе центрифуги способны устранить недостатки, которые присущи стационарным тренажерам на основе платформы, например, невозможность воздействия повышенных перегрузок на летчика и невозможность вызова у летчика физиологического стресса, при этом они также позволяют летчику ощутить неограниченные многокоординатные перемещения, связанные с реальным полетом. Это позволяет летчикам подготовиться к преодолению физиологических стрессов во время обычного полета, а также в условиях полета, выходящих за пределы нормального режима полета.
Краткое раскрытие настоящего изобретения
Несмотря на то, что тренажеры на основе центрифуги превосходят стационарные тренажеры с поршневым приводом, так как они обеспечивают воспроизведение реалистичных перегрузок и полной свободы движения, стандартные тренажеры на основе центрифуги предусматривают состояние постоянного планетарного движения, в результате чего имеет место постоянное вращение на протяжении всего рабочего цикла тренажера.
Состояние постоянного планетарного движения в тренажерах на основе центрифуги может вызвать у стажеров физиологические проблемы и артефакты, с которыми летчик не будет сталкиваться в реальном полете. Эти проблемы могут включать дискомфорт при движении, усталость, нарушение ориентации, зрительные нарушения и другие негативные вызванные движением иллюзии. Иначе говоря, постоянное планетарное движение в стандартных тренажерах на основе центрифуги может оказать негативное психологическое воздействие на стажеров, которое выходит за границы ожидаемого, реального воздействия, оказываемого реальным полетом.
Различные варианты осуществления, описанные в настоящем документе, направлены на решение проблем, вызванных постоянным планетарным движением в стандартных тренажерах на основе центрифуги.
Согласно одному примеру используют контроллер для управления работой тренажера по меньшей мере в одном из нескольких различных режимов, а именно: режиме с повышенной перегрузкой; режиме с нормальной перегрузкой; и переходных режимах (т.е. режимах линейного ускорения или линейного замедления) между режимом с повышенной перегрузкой и режимом с нормальной перегрузкой.
При функционировании в режиме с повышенной перегрузкой контроллер подает команду тренажеру для воспроизведения нескольких первых условий полета посредством вращения тренажера с несколькими значениями угловой скорости, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет более приблизительно одного (1) g.
При функционировании в режиме с нормальной перегрузкой контроллер подает команду тренажеру для воспроизведения нескольких вторых условия полета посредством либо полного прекращения вращения тренажера, либо посредством вращения тренажера со второй меньшей угловой скоростью, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет не более приблизительно одного (1) g.
При функционировании в переходном режиме работы (т.е. режиме линейного ускорения или линейного замедления) пилотажный тренажер осуществляет переход между режимом работы с повышенной перегрузкой и режимом работы с нормальной перегрузкой и наоборот.
Например, предположим, что условия полета виртуального самолета, управляемого стажером, который находится в тренажере, переходят от взлета (т.е. условий полета с повышенной перегрузкой) к горизонтальному полету (т.е. перегрузка составляет приблизительно 1 g). Контроллер может подать команду тренажеру для прекращения активации планетарного движения, и может вызывать замедление угловой скорости тренажера до нуля. Тренажер может занять стационарное положение, в котором вращение либо отсутствует, либо присутствует с настолько низкой угловой скоростью, что только нормальные перегрузки воздействуют на стажера (т.е. перегрузки величиной приблизительно один (1) g).
Согласно другому примеру предположим, что условия полета виртуального самолета, управляемого стажером, который находится в тренажере, переходят от горизонтального полета (т.е. перегрузка составляет приблизительно 1 g) к посадке (т.е. условиям полета с повышенной перегрузкой). Контроллер может подать инструкции тренажеру для начала планетарного движения и вызвать ускорение угловой скорости тренажера от очень низкой скорости или нуля до некоторого значения угловой скорости планетарного движения, которое позволит тренажеру быстро подвергнуть стажера перегрузкам.
Согласно другому примеру при переходном режиме ускорение или замедление вращения пилотажного тренажера происходит с интенсивностью, которая, как правило, находится ниже воспринимаемого человеком порога. Таким образом, стажер, управляющий виртуальным самолетом на тренажере, необязательно ощутит изменение в скорости планетарного движения тренажера (и необязательно ощутит существование какого-либо планетарного движения) и, следовательно, не ощутит повышенных перегрузок.
Согласно другому примеру контроллер также осуществляет генерирование виртуальной обстановки в блоке кабины виртуального самолета, которая представляет заданный реальный самолет, воспроизводимый тренажером. Контроллер осуществляет контроль позиции виртуального самолета относительно заданной виртуальной границы и запускает переход тренажера между режимом с повышенной перегрузкой и режимом с нормальной перегрузкой, по меньшей мере, частично на основании позиции виртуального самолета относительно виртуальной границы.
Таким образом, в настоящем документе раскрываются способы и системы для управления пилотажным тренажером на основе центрифуги таким образом, чтобы минимизировать негативное психологическое воздействие постоянного планетарного движения на стажеров с сохранением реалистичной имитации условий, движений и нагрузок реального полета, с которыми сталкиваются стажеры.
Это краткое раскрытие выполнено для предоставления упрощенного обзора концепций, которые более подробно описаны ниже. Кроме того, это краткое раскрытие необязательно предназначено для идентификации ключевых признаков или существенных признаков заявляемого объекта, а также необязательно предназначено для использования в качестве помощи при определении объема заявляемого объекта.
Краткое описание чертежей
Подробное раскрытие настоящего изобретения выполнено со ссылками на прилагаемые фигуры. На фигурах крайняя левая цифра (цифры) позиции обозначает (обозначают) фигуру, на которой указанная позиция появилась в первый раз.
Одинаковыми позициями на различных фигурах обозначены подобные или идентичные предметы.
На фиг. 1А и 1В представлены примерные тренажеры на основе центрифуги.
На фиг. 1С представлен летчик в кабине виртуального самолета.
На фиг. 2 представлена блок-схема, иллюстрирующая вычислительную систему, применяемую для управления тренажером на основе центрифуги.
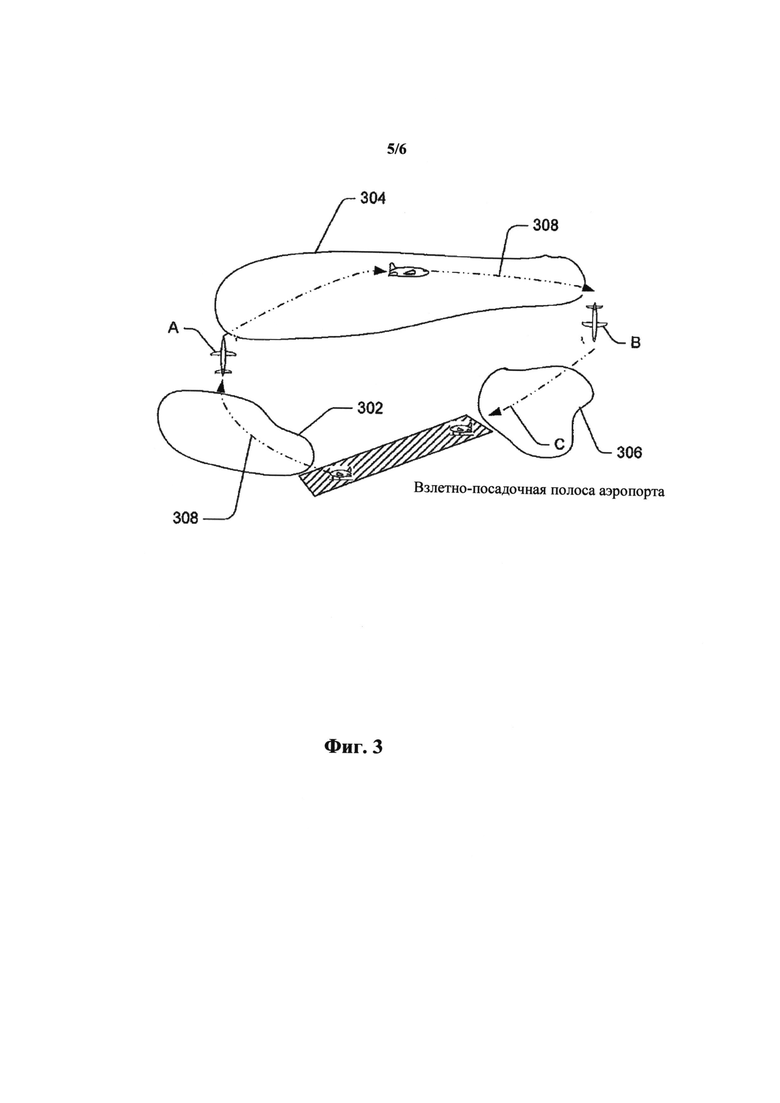
На фиг. 3 представлен пример настраиваемых виртуальных граничных областей.
На фиг. 4 представлен иллюстративный процесс управления тренажером на основе центрифуги в соответствии с различными вариантами осуществления.
Подробное раскрытие настоящего изобретения
Тренажер на основе центрифуги
На фиг. 1А и 1В представлены примерные тренажеры 100 на основе центрифуги, которые согласно иллюстративному примеру содержат блок 102 кабины, блок 104 движения и плечо 108. Как представлено на фиг. 1А и 1В, блок 102 кабины представляет собой камеру, присоединенную к плечу 108 центрифуги. Блок 102 кабины выполнен с возможностью вращения вокруг центральной части 106 тренажера 100 с обеспечением планетарного движения, а также обеспечения воздействия увеличенных перегрузок (G) на летчика/стажера, находящегося внутри блока 102 кабины. Фактические перегрузки, воздействующие на стажера, зависят от длины плеча 108, удаления блока 102 кабины от центральной части 106, а также угловой скорости блока 102 кабины вокруг центральной части 106 (т.е. угловой скорости планетарного движения). Кроме того, блок 102 кабины выполнен с возможностью вращения вокруг независимой оси 110 для воспроизведения перемещения на ±360 градусов по осям рыскания, тангажа и крена.
На фиг. 1C представлено примерное изображение летчика, находящегося внутри блока 102 кабины. Как представлено на фиг. 1C, внутреннее пространство блока 102 кабины может содержать физический макет 112, воспроизводящий сиденье, а также макет органов управления полетом/пилотажных приборов фактической кабины заданного самолета. Дополнительно, при нахождении летчика/стажера внутри блока 102 кабины, интерактивный дисплей 114 может обеспечить заполнение окон кабины, отображая виртуальные или наложенные видеоданные, отображающие в реальном времени все аспекты полета, включая изображения во время взлета, посадки и полета в воздушном пространстве. Таким образом, в блоке 102 кабины могут быть воспроизведены все аспекты имитируемых условий полета в качестве «виртуального самолета», включая перегрузки и перемещение на ±360 градусов по осям рыскания, тангажа и крена.
Как правило, при нахождении в блоке 102 кабины стажер лишен связи с пространством, находящимся за пределами кабины, и должен полностью полагаться на визуальную информацию и приборы, отображаемые в блоке 102 кабины. Таким образом, стажер может летать на виртуальном самолете и физически ощущать условия полета, по существу соответствующие реально существующему самолету, имитируемому тренажером 100.
Согласно иллюстративному примеру тренажером, представленным на фиг. 1А, является GL 4000™, а тренажером, представленным на фиг. 1В, является ATFS-400™, при этом оба указанных тренажа выпускает компания Environment Tectonics Corporation, США. Хотя примерные тренажеры GL 4000™ и ATFS-400™ представлены в настоящем документе в качестве иллюстрации, любые системы, методики и принципы, описанные в настоящем документе, не ограничены каким-либо конкретным тренажером на основе центрифуги и, в целом, могут быть применены к другим маркам и моделям тренажеров.
Вычислительная система (контроллер)
На фиг. 2 представлена блок-схема, иллюстрирующая вычислительную систему 200, которую используют для управления тренажером 202 на основе центрифуги (например, тренажером 100, представленным на фиг. 1). Вычислительная система 200 может представлять собой компонент тренажера 202.
Вычислительная система 200 может представлять собой любое подходящее вычислительное устройство (устройства), которое (которые) характеризуется (характеризуются) наличием одного или нескольких процессоров 204, а также способностью доступа к машинно-читаемому носителю 206 информации. Процессор (процессоры) 204 взаимодействует (взаимодействуют) с машинно-читаемым носителем 206 информации для выполнения команд, которые управляют физическим перемещением тренажера 202, а также для обеспечения условий виртуального полета, которые совпадают с физическими движениями тренажера 202, который имитирует конкретный реально существующий самолет.
Процессоры 204 могут быть распределены в более чем одной вычислительной системе и в сети (не показано). Примеры вычислительных систем 200 могут включать, кроме прочего, сервер, персональный компьютер, специализированный компьютер, распределенные вычислительные системы или другие вычислительные устройства, характеризующиеся наличием доступа к процессору (процессорам) и машинно-читаемым носителям информации. Кроме того, хоть это и не представлено на чертеже, для специалистов в данной области техники будет очевидно, что любое количество системных шин, интерфейсов связи и периферийных устройств, устройств ввода и вывода, а также любых других устройств может быть включено в вычислительную систему 200.
Машинно-читаемые носители 206 информации могут включать любые подходящие запоминающие среды вычислительного устройства, включая энергозависимое и энергонезависимое запоминающее устройство и любое их сочетание. Например, запоминающие среды вычислительного устройства включают энергозависимые и энергонезависимые, съемные и постоянно закрепленные носители, реализованные с использованием любого способа или технологии для хранения данных, таких как машинно-читаемые команды, структуры данных, модули программ или другие данные. Запоминающие среды вычислительного устройства могут также включать, кроме прочего, оперативное запоминающее устройство, постоянное запоминающее устройство, электронно-перепрограммируемое постоянное запоминающее устройство, флэш-память или другие технологии хранения данных, компакт-диск постоянной памяти (CD-ROM), универсальные цифровые диски (DVD) или другие оптические запоминающие устройства, кассеты с магнитной лентой, магнитную ленту, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, или любой другой энергонезависимый или непромежуточный носитель, который может быть использован для хранения данных, которые могут быть обработаны вычислительным устройством.
Согласно другим примерам машинно-читаемый носитель 206 информации может содержать коммуникационную среду, которая может представлять машинно-читаемые команды, структуры данных, модули программ или другие данные в виде модулированного сигнала передачи данных, такого как несущее колебание, или другого механизма передачи данных. Согласно настоящему документу запоминающая среда вычислительного устройства не включает коммуникационную среду.
Кроме того, машинно-читаемый носитель 206 информации может быть выполнен локально и/или удаленно относительно вычислительной системы 200. Например, одна или несколько частей данных или кода, или все данные или весь код, хранимый в машинно-читаемый носителе 206 информации, могут быть или может быть считаны из запоминающей среды вычислительного устройства, расположенной локально и/или удаленно относительно вычислительной системы 200, например, из запоминающей среды, присоединенной к сети.
В машинно-читаемом носителе 206 информации может находиться одна или несколько операционных систем (не показаны), а также любое количество других программных приложений или модулей в форме машинно-исполняемых команд и/или алгоритмов, которые исполняет (исполняют) процессор (процессоры) 204 для обеспечения обработки данных или выполнения других функций.
Модуль управления угловой скоростью планетарного движения
Вычислительная система 200 выполнена с модулем 208 управления угловой скоростью планетарного движения, сохраненным в машинно-читаемом носителе 206 информации. Согласно одному примеру модуль 208 управления угловой скоростью планетарного движения может быть реализован в качестве кода в форме машинно-читаемых команд, которые исполняет один или несколько процессоров 204. В иллюстративных целях программы и другие исполняемые модули программ представлены в настоящем документе в качестве дискретных блоков, хотя понятно, что указанные программы и компоненты могут находиться в разное время в различных компонентах запоминающего устройства. Дополнительно, такой код может быть реализован в качестве одного или нескольких приложений или модулей, или может быть интегрирован в качестве компонентов в одно приложение. Указанный код, сохраненный в машинно-читаемом носителе 206 информации, может быть реализован через один или несколько серверов в облачной вычислительной среде, в локальном устройстве или в их сочетании. Последующее описание не ограничивает реализацию кода, сохраненного в машинно-читаемом носителе 206 информации, каким-либо конкретным устройством или средой.
Модуль 208 управления угловой скоростью планетарного движения может содержать компоненты, хранимые в машинно-читаемом носителе 206 информации. Согласно одному примеру модуль 208 управления угловой скоростью планетарного движения содержит: модуль 210 повышенной перегрузки, модуль 212 нормальной перегрузки и модуль 214 перехода.
Примерный модуль 210 повышенной перегрузки обеспечивает режим работы тренажера 202, при котором угловая скорость планетарного движения превышает минимальный порог для воздействия повышенных перегрузок на стажера, находящегося в блоке 102 кабины (например, который представлен на фиг. 1), при управлении виртуальным самолетом на тренажере 202. В частности, модуль 210 повышенной перегрузки подает команду тренажеру 202 для обеспечения вращения блока кабины вокруг его центральной оси с угловой скоростью, которая обеспечивает воздействие перегрузок, значение которых превышает 1 g, на стажера в блоке 102 кабины во время работы тренажера 200.
Как правило, коэффициент перегрузки является кратным ускорению свободного падения или «g». Например, если воздушное судно генерирует подъемную силу, которая в два раза превышает его вес, то оно будет подвержено коэффициенту перегрузки 2 или 2 g.
В режиме работы с повышенной перегрузкой модуль 210 повышенной перегрузки может также обеспечить воспроизведение тренажером 200 множества условий полета, в которых летчик будет испытывать большие перегрузки. Такие условия полета могут включать взлет, посадку, вираж, воздействие ветреной погоды, воздействие турбулентности в спутном следе, преодоление неисправностей или некоторых условий, которые могут быть вызваны действиями летчика, при этом указанные условия, при возникновении в реальных условиях полета, будут вызывать воздействие перегрузки, которая примерно превышает 1 g, на летчика, пилотирующего реально существующий самолет.
В режиме работы с повышенной перегрузкой тренажер 200 может продолжать перемещение на±360 градусов по осям рыскания, тангажа и крена, в дополнение к планетарному движению блока 102 кабины.
В режиме работы с нормальной перегрузкой примерный модуль 212 нормальной перегрузки подает команду тренажеру 200 для осуществления воспроизведения множества условий, наряду со снижением угловой скорости тренажера до нуля или вращением тренажера с некоторой угловой скоростью, в результате чего на стажера во время работы тренажера воздействует перегрузка, которая примерно составляет 1 g.
Например, при условии полета, когда происходит горизонтальный полет, коэффициент перегрузки приблизительно составляет 1 g. Другие условия полета с перегрузкой приблизительно 1 g могут включать в себя пологие развороты, и различные не связанные с разворотом подъемы или снижения и т.п. В нормальном режиме работы модуль 212 нормальной перегрузки подает команду тренажеру 202 не осуществлять планетарное перемещение блока кабины (т.е. сохранять неподвижное положение без осуществления вращательного движения). В нормальном режиме работы модуль 212 нормальной перегрузки может также подавать команду тренажеру для осуществления вращения блока кабины с угловой скоростью, достаточно медленной для того, чтобы перегрузка величиной приблизительно 1 g воздействовала на стажера.
Согласно одному примеру настраиваемые виртуальные граничные области могут быть определены в отношении местоположения и высоты, или могут быть динамически сгенерированы на основании скорости или перемещения виртуального самолета. Другие соответствующие переходы между повышенной и нормальной перегрузками могут быть вызваны, автоматически или вручную, в зависимости от воспроизводимых условий полета и окружающей обстановки.
В режиме работы с нормальной перегрузкой тренажер 200 может продолжать перемещение на ±360 по осям рыскания, тангажа и крена.
В переходном режиме работы примерный модуль 214 перехода подает команду тренажеру 200 для линейного ускорения или замедления угловой скорости. В частности, модуль перехода 214 подает команду пилотажному тренажеру для перехода из режима работы с повышенной перегрузкой в режим работы с нормальной перегрузкой или наоборот.
Например, предположим, что условия полета виртуального самолета, управляемого стажером, который находится в тренажере, переходят от взлета (т.е. условий полета с повышенной перегрузкой) к горизонтальному полету (т.е. перегрузка составляет приблизительно 1 g). Модуль 214 перехода подает команду тренажеру 202 для прекращения активации планетарного движения, таким образом, вызывая замедление угловой скорости вращающегося блока кабины до нуля и переход в режим работы с нормальной перегрузкой.
Согласно другому примеру предположим, что условия полета виртуального самолета, управляемого стажером, который находится в тренажере, переходят от горизонтального полета (т.е. перегрузка составляет приблизительно 1 g) к посадке (т.е. к условиям полета с повышенной перегрузкой). Модуль 214 перехода может подать команду тренажеру 202 для начала планетарного движения и обеспечения ускорения угловой скорости тренажера от нуля (или другого низкого значения угловой скорости) до некоторого значения, которое позволит тренажеру быстро подвергнуть стажера перегрузке.
Согласно другому примеру ускорение или замедление вращения пилотажного тренажера происходит с интенсивностью, которая, как правило, находится ниже воспринимаемого человеком порога. Например, при запуске переходного режима работы, модуль 214 перехода подает команду тренажеру для обеспечения планетарного движения блока кабины с подпороговым значением ускорения (максимально 1-2°/сек2) во время связанных с центрифугой операций, что снизит угловую скорость стажера при планетарном движении до нуля (см. Groen, J.J., Jongkees, L.B.W. «The threshold of angular acceleration perception», J. Physiol 107, 1-7, 1948, который ссылкой включен в настоящий документ). Поскольку замедление ниже порога человеческого восприятия (т.е. равно «подпороговому» значению), стажер/летчик, как правило, не знает, что вращение прекратилось.
Поскольку стажер не нуждается в перегрузках, он или она остается реалистично погруженным в имитацию (в режиме работы с нормальной перегрузкой) без накапливающихся эффектов ненужного планетарного движения.
Соответственно, если программа предусматривает наличие перегрузок, то может быть выполнено обратное. Такая гибкость обеспечивает неограниченное число переходов между режимами работы с повышенными перегрузками и нормальными перегрузками. Дополнительно, интенсивность, с которой планетарное движение начинают или останавливают, является полностью настраиваемой. После рассмотрения преимуществ настоящего раскрытия специалистам в данной области техники будет понятно, что оптимальные интенсивности ускорения, замедления и перехода для осуществления незаметного перехода между режимами работы будут варьироваться для каждого тренажера, а также других факторов, таких как условия полета.
Таким образом, находящийся внутри тренажера стажер, управляющий виртуальным самолетом, необязательно ощутит существование планетарного движения тренажера при переходе между режимами работы с повышенной перегрузкой и нормальной перегрузкой. То есть благодаря постепенному переходу между повышенными перегрузками и нормальными перегрузками стажеры могут более комфортно приспособиться и адаптироваться к окружающим условиям с непрерывным планетарным движением, а также увеличить время пребывания в тренажерах на основе центрифуги без возникновения укачивания. При обеспечении плавного сопряжения планетарного движения (с частичным режимом или неподвижным режимом) происходит устранение сенсорного конфликта между полукружными каналами и визуальной системой, при этом быстро и медленно возникающие составляющие укачивания начнут быстро уменьшаться. В течение этого периода стажеры могут также выполнять нормальные операции и движения головой без воздействия кориолисовых перекрестных связей. При окончании события без планетарного движения стажеры могут быть неосознанно возвращены в полностью подвижный режим движением при помощи процесса плавного сопряжения (т.е. перехода между режимами работы). Указанный переход в полностью неподвижный режим также осуществляют с подпороговой интенсивностью для того, чтобы сохранить желаемые эффекты погружения, обеспечиваемого при работе тренажера. То есть ускорение или замедление вращения пилотажного тренажера происходит с интенсивностью, которая, как правило, находится ниже воспринимаемого человеком порога, как описано в настоящем документе.
Например, плавное сопряжение режимов работы с повышенной перегрузкой, режимов работы с нормальной перегрузкой и переходных (т.е. частичных) режимов работы может быть осуществлено на различных фазах полета. Например, предположим, что летчик-истребитель выполняет занятие на тренажере, при этом для выполнения задания необходимы как небольшие, так и повышенные перегрузки. Начальная часть задания не требует повышенных перегрузок, поэтому летчик может работать либо в частичном режиме, либо неподвижном режиме (т.е. взлет и прибытие в район цели). Вторая фаза задания предусматривает наличие высоких перегрузок, следовательно, модуль 208 управления угловой скоростью планетарного движения активирует планетарное движение с использованием плавного сопряжения или перехода между различными режимами работы, описанными выше. Третья фаза этого конкретного задания состоит из дозаправки топливом в полете и последующей посадки на аэродром, с которого был произведен взлет. Поскольку для этих действий не требуются повышенные перегрузки, осуществляют плавный перевод летчика из полностью подвижного режима с планетарным движением в частичный режим или неподвижный режим по необходимости.
Согласно другому примеру переход между режимом работы с повышенной перегрузкой и режимом работы с нормальной перегрузкой или наоборот может быть запущен при помощи наблюдения (т.е. слежения) за позицией виртуального самолета относительно виртуальной границы. В частности, модуль 214 контроля положения контролирует позицию виртуального самолета относительно заданной виртуальной границы и подает сигнал (т.е. подает команду в модуль 212 перехода) для ускорения или замедления вращения тренажера, по меньшей мере, частично на основании позиции виртуального самолета относительно виртуальной границы.
Перед осуществлением имитации условий виртуального полета могут быть заданы несколько настраиваемых виртуальных граничных областей. На фиг. 3 представлены примерные настраиваемые виртуальные граничные области 302, 304 и 306, которые представлены в виртуальном трехмерном пространстве (фиг. 3 выполнена без соблюдения масштаба).
Рассмотрим, например, фиг. 3, первая виртуальная граничная область 302 может быть ограничена так, чтобы включать часть взлетно-посадочной полосы для взлета и проходить до высоты нескольких тысяч футов, при этом в этой области стажер может испытать повышенные перегрузки при пилотировании виртуального самолета, который взлетает и набирает высоту, в тренажере на основе центрифуги. То есть, когда виртуальный самолет взлетает и набирает высоту в пределах виртуальной граничной области 302, тренажер 200 (фиг. 2) обеспечивает воздействие повышенной перегрузки на стажера, находящегося в блоке 102 кабины (фиг. 1А и 1В). Указанные повышенные перегрузки должны по существу соответствовать фактическим перегрузкам, испытываемым летчиком при пилотировании заданного реального самолета, временные характеристики и характеристики поведения которого соответствует таким же характеристикам виртуального самолета, следующего по траектории 308 полета.
Поскольку примерно в позиции А виртуальный самолет выходит за пределы виртуальной границы 302, происходит запуск переходного режима работы и модуль 214 перехода может подать команду тренажеру 202 с тем, чтобы замедлить планетарное движение тренажера 202 до нуля в ожидании вхождения в виртуальную граничную область 304, в которой предстоит горизонтальный полет. В течение этой части траектории полета 308 отсутствует необходимость в перегрузках так, что стажер может работать в режиме с нормальной перегрузкой, как описано ниже.
Примерно в позиции В, в которой находится виртуальный самолет перед вхождением в область виртуальной границы 306, происходит смена условий полета виртуального самолета, а именно самолет переходит от горизонтального полета (т.е. условий полета с перегрузкой приблизительно 1 g) к посадке (т.е. условиям полета с повышенными перегрузками). В этом случае, модуль 214 перехода может подать команду тренажеру 202 для начала планетарного движения и обеспечения ускорения угловой скорости тренажера от нуля (или другого низкого значения угловой скорости) до некоторой угловой скорости планетарного движения, что позволит тренажеру обеспечить быстрое воздействие перегрузки на стажера в или поблизости позиции С (например, прямо перед осуществлением посадки самолета на авианосец или аэродром, при которой могут быть восприняты повышенные перегрузки).
Переход между событиями с нормальной перегрузкой (1 g) и повышенной перегрузкой или, наоборот, посредством ускорения или замедления вращения пилотажного тренажера, как правило, осуществляют с интенсивностью, которая в целом ниже воспринимаемого человеком порога; при этом необходимо наличие достаточно большого промежутка между возникновением каждого события с повышенной перегрузкой или без перегрузки.
Специалисты в данной области техники понимают, что частичное или незначительное восприятие ускорения или замедления блока 102 кабины (фиг. 1А и 1В) может быть осуществлено некоторыми людьми, которые более чувствительны к движениям. Дополнительно, значения скоростей вращения могут незначительно превышать допустимые значения порогов ускорения или замедления, как определено выше. В некоторых ситуациях такие угловой скорости, несмотря на то, что они находятся на рубеже, частично превышают или слегка превышают порог восприятия человека, могут также рассматриваться как находящиеся в целом ниже обнаруживаемого человеком порога.
После рассмотрения преимуществ настоящего раскрытия специалистам в данной области техники понятно, что приведенный выше пример со ссылками на фиг. 3 является лишь одним из множества различных способов, посредством которых различные режимы работы и множество настраиваемых условий полета могут быть реализованы/запущены с соответствующими перегрузками; при этом все они должны соответствовать фактическим перегрузкам, возникающим в заданном реальном самолете во время таких же условий полета.
Сопряжение повышенных перегрузок с нормальными перегрузками, а также переход между ними систематически реализуется системой 200 (фиг. 2) для того, чтобы минимизировать продолжительность воздействия планетарного движения с непрерывными перегрузками только теми событиями, которые требуют непрерывных перегрузок и для которых непрерывные перегрузки являются преимущественными.
Иллюстративный процесс
На фиг. 4 представлен иллюстративный процесс 400 управления тренажером на основе центрифуги в соответствии с различными вариантами осуществления. Процесс 400 может быть описан со ссылками на фиг. 1А, 1В, 1C, 2 и 3.
Процесс 400 представлен в виде набора блоков, входящих в состав логической блок-схемы, которая представляет последовательность операций, которые могут быть реализованы в аппаратном обеспечении, программном обеспечении или их сочетании. В контексте программного обеспечения блоки представляют машинно-исполняемые команды, которые при выполнении одним или несколькими процессорами, осуществляют перечисленные операции. Как правило, машинно-исполняемые команды включают подпрограммы, программы, объекты, компоненты, структуры данных и т.п., которые осуществляют конкретные функции или реализуют конкретные абстрактные типы данных. Порядок, в котором описаны операции, не должен рассматриваться в качестве ограничения, при этом любое количество описанных блоков может быть объединено в любом порядке и/или параллельно для реализации процесса. Кроме того, один или несколько описанных блоков могут быть опущены без отступления от объема настоящего раскрытия.
В блоке 402 тренажер имитирует несколько первых условий полета при помощи вращения тренажера с некоторой угловой скоростью, что обеспечивает физическое воздействие на летчика повышенных перегрузок (т.е. перегрузок величиной примерно более 1 g). После имитации по меньшей мере одного из нескольких первых условий полета процесс 400 переходит к блоку 404.
В блоке 404, при условии, что тренажер переходит к имитации одного из нескольких вторых условий полета, происходит снижение угловой скорости планетарного движения тренажера за некоторый период времени до нуля. По меньшей мере, часть замедления вращения тренажера осуществляют с интенсивностью, которая, как правило, ниже порога восприятия стажера во время работы тренажера.
В блоке 406 тренажер имитирует несколько вторых условий полета посредством снижения угловой скорости тренажера до нуля или снижения скорости тренажера до низкой угловой скорости так, чтобы перегрузка величиной примерно 1 g физически действовала на стажера при работе тренажера. После имитации по меньшей мере одного из нескольких вторых условий полета процесс 400 переходит к блоку 408.
В блоке 408, при условии, что тренажер переходит к имитации одного из нескольких первых условий полета, происходит ускорение угловой скорости планетарного движения тренажера. По меньшей мере, часть ускорения вращения тренажера (т.е. линейное ускорение) осуществляют с интенсивностью, которая, как правило, ниже воспринимаемого стажером порога во время работы тренажера (вращательное движение тренажера, как правило, осуществляют при подпороговых уровнях человеческого восприятия).
Заключение
Имитация на тренажерах на основе центрифуги учитывает все элементы достоверности: реалистичные кабины или модули; визуально отображение «из окна» с широким сектором обзора и высоким разрешением; характерные модели самолетов; синхронизация движений; и постановка задач таким образом, чтобы на стажера было оказано воздействие, аналогичное воздействию, которое он или она будет испытывать при пилотировании реального аэрокосмического летательного аппарата. Эти аспекты достоверности способствуют более глубокому погружению стажеров в процесс имитации с тем, чтобы максимально увеличить получаемый на тренажере опыт. Ключевым отличием имитации с использованием центрифуги от других подвижных платформ, включая платформы с шестью степенями свободы, является способность обеспечивать постоянные перегрузки. Тем не менее эта способность может быть причиной сенсорных конфликтов, вызывать чрезмерное утомление или другие негативные связанные движением артефакты.
С целью противодействия некоторым негативным воздействиям вращения на центрифуге представленное выше раскрытие предоставляет тренажеры на основе центрифуги, которые характеризуются наличием трех подвижных состояний функционирования. Эти режимы включат: подвижный режим с повышенными перегрузками; режим для осуществления перехода между режимами (как правило, переходной режим работы); и режим с без перегрузки. Все режимы работы обеспечивают три полные степени свободы (тангаж, крен и рыскание). Переходной режим работы просто прекращает или начинает (возобновляет) планетарное движение устройства, при этом иногда это происходит на уровне восприятия ниже порогового значения. Способность осуществлять плавный переход между этими режимами работы без знания об этом стажера обеспечивает способность осуществить полную и глубокую имитацию условий полета, при этом негативные эффекты планетарного движения будут минимизированы или устранены.
Таким образом, согласно некоторым примерам режим работы с повышенной перегрузкой представляет собой рабочую фазу, на которой перегрузки, генерируемые имитируемым полетом, воспроизводятся в максимально возможной степени при помощи простого ускорения плеча для генерирования центробежной силы, а также ориентирования летчика для распределения этой центробежной силы на присущие ей составляющие x, y и z, чтобы воздействовать на субъекта, находящегося в блоке кабины, для воспроизведения нагрузок и ощущений, которые будет испытывать летчик в кабине реально существующего летательного аппарата.
Дополнительно, режим работы с нормальной перегрузкой (величиной 1 g) представляет собой рабочую фазу, на которой делается упор на воспроизведение признаков движения вместо постоянных перегрузок. Это осуществляют посредством снижения скорости плеча до уровня, при котором перегрузка не ощущается стажером, или посредством остановки плеча, после чего при необходимости задают надлежащие значения тангажа, крена и рыскания для блока кабины, что соответствует значениям вращательного ускорения летательного аппарата. Эти команды со временем перестают действовать для поддержания блока кабины в нейтральном положении.
При упоминании в настоящем документе терминов «приблизительно» или «примерно» по отношению к термину 1 g подразумевают перегрузку, обычно воспринимаемую человеком, стоящим на земной поверхности, при этом она может быть незначительно больше или меньше 1 g в зависимости от местоположения и/или незначительных движений плеча тренажер на основе центрифуги.
При упоминании в настоящем документе терминов «пример», «варианты осуществления» или подобных формулировок подразумевают, что конкретный признак, структура, операция или характеристика, описанная по отношению к конкретному примеру, включены, по меньшей мере, в одну реализацию в настоящем описании. Таким образом, появление таких фраз или формулировок в настоящем документе необязательно относятся к одному и тому же примеру. Кроме того, различные конкретные характеристики, структуры, операции или характеристики могут быть объединены любым подходящим образом в одном или нескольких примерах.
Несмотря на то, что объект был описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что объект, определенный в прилагаемой формуле изобретения, необязательно ограничен описанными конкретными признаками или действиями. Напротив, конкретные признаки и действия раскрыты в качестве иллюстративных форм реализации формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| ПИЛОТАЖНЫЙ СТЕНД НАЗЕМНОГО КОМПЛЕКСА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ЛЕТЧИКА К ВЫПОЛНЕНИЮ ПОЛЕТОВ НА САМОЛЕТЕ-ИСТРЕБИТЕЛЕ | 2003 |
|
RU2249856C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕНОСИМОСТИ ЛЕТЧИКОМ ПИЛОТАЖНЫХ ПЕРЕГРУЗОК | 1994 |
|
RU2129404C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| СИСТЕМА ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2005 |
|
RU2347722C2 |




Группа изобретений относится к способам и системе управления пилотажным тренажером на основании центрифуги. Для управления пилотажным тренажером на основании центрифуги с целью имитации определенных условий полета вращают тренажер с несколькими значениями угловой скорости в зависимости от нужной перегрузки, замедляют либо ускоряют вращение тренажера с интенсивностью ниже обычно воспринимаемой стажером для перехода к имитации соответствующего режима полета, генерируют виртуальную обстановку в блоке кабины виртуального самолета относительно заданной виртуальной границы. Система управления пилотажным тренажером на основании центрифуги содержит контроллер, состоящий из одного или несколько процессоров и машинно-читаемого носителя информации, выполненный с возможностью обеспечения действий для вышеуказанных способов управления пилотажным тренажером. Обеспечивается реалистичность имитации условий, движений и нагрузок реального полета. 3 н. и 11 з.п. ф-лы, 6 ил. 
1. Способ управления пилотажным тренажером на основе центрифуги, включающий в себя:
вращение тренажера с несколькими значениями угловой скорости, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет более приблизительно одного (1) g, чтобы воспроизвести множество первых условий полета, в результате которых стажер испытывает повышенные перегрузки; и
прекращение вращения или вращение со второй меньшей угловой скоростью, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет не более приблизительно одного (1) g, чтобы имитировать множество вторых условий полета, в результате которых стажер не испытывает повышенных перегрузок;
замедление вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого стажером порога при управлении виртуальным самолетом на тренажере для того, чтобы перейти от одного или более из множества первых условий полета к одному или более из множества вторых условий полета; и
ускорение вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого человеком порога для перехода от одного или более из множества вторых условий полета к одному или более из множества первых условий полета.
2. Способ по п. 1, отличающийся тем, что дополнительно предусматривает:
генерирование виртуальной обстановки в блоке кабины виртуального самолета, которая представляет заданный реальный самолет, воспроизводимый тренажером, при этом блок кабины расположен на дистальном конце плеча тренажера;
осуществление контроля позиции виртуального самолета относительно заданной виртуальной границы; и
осуществление по меньшей мере одного из ускорения и замедления вращения тренажера, по меньшей мере, частично на основании позиции виртуального самолета относительно виртуальной границы.
3. Способ по п. 1, отличающийся тем, что перегрузки, по существу, соответствует фактическим перегрузкам, возникающим в заданном самолете во время таких же условий полета, как имитируемые первые и вторые условия полета.
4. Способ управления пилотажным тренажером на основе центрифуги, предусматривающий:
имитацию множества первых условий полета посредством вращения тренажера с несколькими значениями угловой скорости, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет более приблизительно одного (1) g; и
имитацию множества вторых условий полета путем прекращения вращения тренажера или путем вращения тренажера со второй меньшей угловой скоростью, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет не более приблизительно одного (1) g.
5. Способ по п. 4, отличающийся тем, что дополнительно предусматривает:
генерирование виртуальной обстановки в кабине виртуального самолета, которая представляет заданный реальный самолет, воспроизводимый тренажером;
осуществления контроля позиции виртуального самолета относительно заданной виртуальной границы; и
переход между одним или более из множества первых условий полета и одним или более из множества вторых условий полета, по меньшей мере, частично на основании позиции виртуального самолета относительно виртуальной границы.
6. Способ по п. 4, отличающийся тем, что дополнительно предусматривает переход от одного или более из множества первых условий полета к одному или более из множества вторых условий полета путем замедления вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого стажером порога при управлении виртуальным самолетом на тренажере.
7. Способ по п. 4, отличающийся тем, что дополнительно предусматривает переход от одного или более из множества вторых условий полета к одному или более из множества первых условий полета путем ускорения вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого человеком порога.
8. Способ по п. 4, отличающийся тем, что дополнительно предусматривает обеспечение полных трех степеней свободы движения тренажера, соответствующих тангажу, крену и рысканию виртуального самолета при имитации тренажером множества первых условий полета или множества вторых условий полета.
9. Способ по п. 4, отличающийся тем, что перегрузки, по существу, соответствует фактическим перегрузкам, возникающим в заданном самолете во время таких же условий полета, как имитируемые первые и вторые условия полета.
10. Система управления пилотажным тренажером на основе центрифуги, содержащая:
один или несколько процессоров и машиночитаемый носитель информации, соединенный для передачи данных с одним или несколькими процессорами, которые совместно образуют контроллер, при этом контроллер функционирует в одном из следующих режимов:
режим с повышенной перегрузкой, в котором контроллер подает команду тренажеру для воспроизведения множества первых условий полета посредством вращения тренажера с рядом значений угловой скорости, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет более приблизительно одного (1) g;
режим с нормальной перегрузкой, в котором контроллер подает команду тренажеру для воспроизведения множества вторых условий полета посредством прекращения вращения тренажера или посредством вращения тренажера со второй меньшей угловой скоростью, что обеспечивает физическое воздействие на стажера во время работы тренажера перегрузки, значение которой составляет не более приблизительно одного (1) g.
11. Система по п. 10, отличающаяся тем, что контроллер также выполнен с возможностью функционирования в режиме линейного замедления, в котором контроллер подает команду тренажеру для перехода от одного или более из нескольких первых условий полета к одному или более из нескольких вторых условий полета посредством замедления вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого стажером порога при управлении виртуальным самолетом на тренажере.
12. Система по п. 10, отличающаяся тем, что контроллер также выполнен с возможностью функционирования в режиме линейного ускорения, в котором контроллер подает команду тренажеру для перехода от одного или более из множества вторых условий полета к одному или более из множества первых условий полета посредством ускорения вращения пилотажного тренажера с интенсивностью ниже обычно воспринимаемого человеком порога.
13. Система по п. 10, отличающаяся тем, что контроллер также выполнен с возможностью функционирования для
генерирования виртуальной обстановки в кабине виртуального самолета, которая представляет заданный реальный самолет, воспроизводимый тренажером;
осуществления контроля позиции виртуального самолета относительно заданной виртуальной границы; и
перехода между режимами с повышенной перегрузкой и нормальной перегрузкой, по меньшей мере, частично на основании позиции виртуального самолета относительно виртуальной границы.
14. Система по п. 10, отличающаяся тем, что контроллер также выполнен с возможностью подавать команды тренажеру для перемещения с тем, чтобы воспроизвести движения реального самолета при осуществлении по меньшей мере одного из движений тангажа, крена и рыскания.
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| SU 1360443 A1, 20.01.1996 | |||
| Механический выпрямитель трехфазного тока | 1930 |
|
SU29901A1 |
| US 4710128 A1, 01.12.1987 | |||
| US 5051094 A1, 24.09.1991.. | |||

