Изобретение относится к электротехнике и может быть использовано в мостовых инверторах напряжения, предназначенных для частотно-регулируемого электропривода. В электроприводе переменного тока с частотно-токовым управлением важная задача повышение точности регулирования выходного тока и расширение динамического диапазона по сигналу задания.
Известен способ слежения за выходным током (или напряжением) инвертора (В. И. Олещук, Е.Е.Чеплыгин. Вентильные преобразователи с замкнутым контуром управления. Киев, "Штипица", 1982, с.6 14), который заключается в следующем: определяют разность между интегралом от входного тока (или напряжения) и сигналом задания. Величина этой разности, подаваемой на схему распределения, формирует импульсы управления вентилями инвертора.
К недостаткам способа следует отнести то, что ошибка слежения зависит от частоты сигнала задания.
Известен способ управления инвертором (Г.С.Зиновьев, В.И.Попов. Анализ одного из способов управления инвертором напряжения. Сборник устройства преобразовательной техники. Вып. 4, Киев, 1970, с.112 122), осуществляющий слежение за сигналом обратной связи, пропорциональным мгновенному значению тока нагрузки, сравнивают сигналы задания и обратной связи. Один фронт импульса управления вентилями инвертора задан генератором тактовой частоты, другой зависит от результата сравнения сигнала ошибки с уровнем ее величины.
Недостаток способа низкая точность регулирования выходного тока, т.к. слежение за током ведется с ошибкой одного знака.
Известен способ управления автономным инвертором напряжения (авт. свид. СССР N1403301, кл. H02M 7/48, 1986). Способ заключается в следующем. Сигнал задания, определяющий форму тока в нагрузке, сравнивают с сигналом обратной связи, пропорциональным мгновенному значению тока в нагрузке, формируют тактовый импульс постоянной частоты. В момент формирования тактового импульса запоминают знак ошибки и формируют сигналы управления вентилями инвертора. Сигналы переключения вентилей формируют при изменении знака ошибки в текущем такте относительно предыдущего.
К недостаткам способа следует отнести то, что точность зависит от частоты сигнала задания.
Известен способ управления мостовым инвертором напряжения (авт. свид. СССР N 1653106, кл. Н02М 7/48, 1989), выбранный авторами за прототип. Способ заключается в следующем: сигнал задания, определяющий форму тока в нагрузке инвертора, сравнивают с сигналом обратной связи, пропорциональным мгновенному значению напряжения на нагрузке, сигнал обратной связи фильтруют и ослабляют коммутационное напряжение помехи. Полученный сигнал ошибки интегрируют, формируют тактовые импульсы постоянной частоты. В момент формирования тактового импульса запоминают знак интеграла от ошибки. Сигналы переключения вентилей формируют при изменении знака интеграла ошибки в текущем такте относительно предыдущего.
Прототип описывается следующей системой уравнений: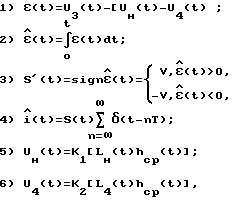
где ε(t) - сигнал ошибки, Uз(t) сигнал значения, Uн(t), Uч(t) сигналы обратной связи для нечетных и четных моментов времени включения вентилей, Lн(t), Lч(t) последовательность, формируемая вентилями соответственно в нечетные и четные моменты времени включения вентилей, K1, K2 коэффициенты пропорциональности, ±U напряжение на выходе инвертора,  сигналы управления вентилями инвертора, T период тактовых импульсов, hср переходная характеристика фильтра.
сигналы управления вентилями инвертора, T период тактовых импульсов, hср переходная характеристика фильтра.
Оценим точность прототипа. При оптимальном выборе K1, K2, т.е. когда сигнал обратной связи равен обратному значению сигнала задания за тактовый интервал, интеграл от ошибки за такт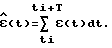
Из этого выражения следует, что для уменьшения ошибки слежения необходимо исключить или ослабить влияние известных ошибок интегратора, что в прототипе не выполняется.
Максимальная скорость нарастания сигнала обратной связи
γ=εfmaкm.
Если принять U3=Umsin2πf3t то интеграл от этого выражения: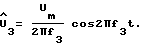
В прямом канале системы выполняется дифференцирование этого сигнала, поэтому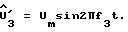
Таким образом, максимальная амплитуда входного сигнала, которая не перегружает инвертор
зависит от тактовой частоты и не зависит от сигнала задания. Увеличивать тактовую частоту беспредельно нельзя, потому что вентили имеют граничную частоту переключения, выше которой резко возрастают потери мощности на вентилях, сказываются паразитные емкости, задерживающие переключение.
К недостаткам способа-прототипа следует отнести то, что погрешность слежения зависит от длительности интервала проводимости и от состояния интегратора. Поэтому в предлагаемом способе решается задача повышения точности и расширения динамического диапазона регулирования выходного тока мостового инвертора напряжения.
Способ управления мостовым инвертором, по которому формируют сигнал задания, формируют сигнал обратной связи пропорционально мгновенному значению напряжения на нагрузке, сравнивают его с сигналом задания, формируют сигнал ошибки путем интегрирования с помощью интегратора разности сигнала задания и сигнала обратной связи, определяют его знак, формируют тактовые импульсы через заданный период, в момент их формирования запоминают знак ошибки и после его изменения в момент наличия тактового импульса формируют сигнал переключения вентилей мостового инвертора, отличающийся тем, что сравнивают сигнал ошибки с дополнительно сформированным пороговым напряжением и в момент выхода сигнала ошибки за границы порогового напряжения формируют очередной тактовый импульс через период времени, меньший заданного, кроме того, в момент прохождения тактового импульса устанавливают интегратор в начальное состояние.
Для устранения недостатка прототипа в начале соответствующих интервалов проводимости каждой пары вентилей следует обнулять интегратор и изменять период тактовых импульсов в зависимости от величины интеграла ошибки, т.е. с учетом крутизны сигнала задания.
Обнуление интегратора повышает точность, т.к. нет накопления систематической ошибки интегратора, обусловленной дрейфом нуля. Зависимость периода тактовых импульсов от величины интеграла ошибки расширяет динамический диапазон.
Предлагаемый способ реализуется на устройстве, структурная схема которого приведена на фиг. 1. Устройство содержит суммирующий элемент 1, выход которого соединен с входом инвертора 2, выход которого соединен с входом схемы формирования синхронизирующих импульсов 3 и с входом компаратора 4. Второй вход компаратора 4 соединен со средней точкой источника питания, а его выход соединен с входом схемы формирования импульсов управления вентилями 5, схема формирования синхронизирующих импульсов 3 соединена с входом генератора 6, один выход которого соединен с входом обнуления интегратора 2, а другой выход соединен с входом схемы формирования импульсов управления вентилями 5, выходы схемы 5 подключены к вентилям 7, 8, 9, 10. Нагрузка 11 соединена с вентилями 7, 8 с одной стороны и с вентилями 9, 10 с другой. На фильтры 12 и 13 поданы сигналы с общих точек вентилей 7, 8 нагрузки соответственно. Сигнал задания и сигнал обратной связи фильтров 12 и 13 поданы на входы суммирующего элемента 1.
Согласно принятому обозначению, когда замкнуты нечетные и разомкнуты четные вентили в нагрузке 11, ток возрастает, и наоборот в противоположном случае. Рассмотрим работу устройства, реализующего способ, по временной диаграмме, изображенной на фиг. 2. Управление периодом оптимальных тактовых импульсов Топт. осуществляет узел 3, на выходе которого формируются синхронизирующие импульсы L. Работа узла 3 описывается следующим уравнением:
где  выход узла 3, D порог, выбираемый из технических требований к устройству и возможности реализации.
выход узла 3, D порог, выбираемый из технических требований к устройству и возможности реализации.
Генератор тактовых импульсов 6 имеет выход, по которому импульсами  его синхронизируют в случае перегрузки инвертора. Если импульсы синхронизации
его синхронизируют в случае перегрузки инвертора. Если импульсы синхронизации  , то генератор 6 для отпирания вентилей 5 вырабатывает оптимальные тактовые импульсы с периодом Топт., которые изображены на фиг.2 (Uг).
, то генератор 6 для отпирания вентилей 5 вырабатывает оптимальные тактовые импульсы с периодом Топт., которые изображены на фиг.2 (Uг).
Рассмотренная схема описывается системой уравнений, полученных из уравнений прототипа с учетом, что период тактовых импульсов переменный, а именно:
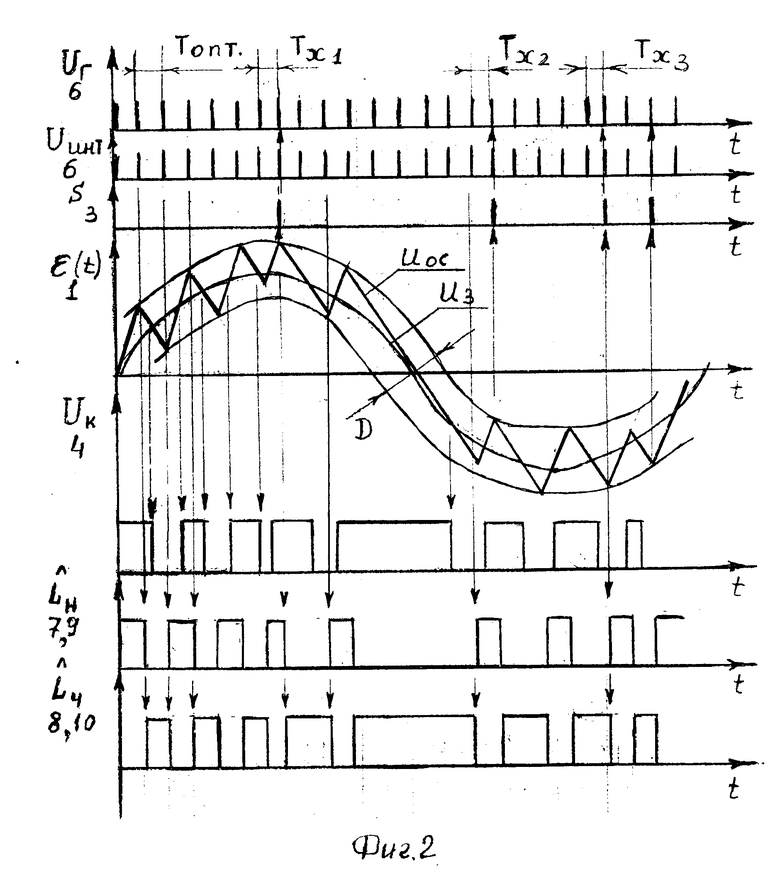
Пока  не выходит из интервала [-D, D] устройство работает аналогично прототипу, только с обнулением интегратора. При выходе из этого интервала уменьшается период тактовых импульсов Uг. На временной диаграмме (фиг. 2) импульсы Uг и Uинт., формируемые на выходах генератора 6, подаются, соответственно, на схему управления вентилями 5 и на вход обнуления интегратора 2. Схема формирования синхронизирующих импульсов 3 формирует сигналы
не выходит из интервала [-D, D] устройство работает аналогично прототипу, только с обнулением интегратора. При выходе из этого интервала уменьшается период тактовых импульсов Uг. На временной диаграмме (фиг. 2) импульсы Uг и Uинт., формируемые на выходах генератора 6, подаются, соответственно, на схему управления вентилями 5 и на вход обнуления интегратора 2. Схема формирования синхронизирующих импульсов 3 формирует сигналы  , которые появляются на ее выходе в момент времени выхода сигнала обратной связи Uос из допустимого порога D (см. момент времени, соответствующий импульсу с периодом Тх1, Тх2, Тх3). Сигнал
, которые появляются на ее выходе в момент времени выхода сигнала обратной связи Uос из допустимого порога D (см. момент времени, соответствующий импульсу с периодом Тх1, Тх2, Тх3). Сигнал  поступает на вход генератора 6 и изменяет длительность оптимальных импульсов генератора Топт. до значений Тх1, Тх2, Тх3 и т.д. подаваемых на схему 5 для изменения длительности работы вентилей. Это приводит к переключению нечетных (7, 9) и четных (8, 10) вентилей, которые формируют изменение сигнала Uос (Uос Uч(t) + Uн(t) так, что он не покидает заданный порог D. Этим обеспечивается заданная точность слежения за сигналом задания Uз.
поступает на вход генератора 6 и изменяет длительность оптимальных импульсов генератора Топт. до значений Тх1, Тх2, Тх3 и т.д. подаваемых на схему 5 для изменения длительности работы вентилей. Это приводит к переключению нечетных (7, 9) и четных (8, 10) вентилей, которые формируют изменение сигнала Uос (Uос Uч(t) + Uн(t) так, что он не покидает заданный порог D. Этим обеспечивается заданная точность слежения за сигналом задания Uз.
Для реализации заданного алгоритма функционирования (см. формулы 1 8) необходимо сравнить интеграл ошибки  с дополнительно заданным в блоке 4 пороговым напряжением, соответствующим Uз, и сформировать на выходе блока 4 сигнал S(t) Uк, изображенный на фиг. 2, что соответствует реализации уравнения 3.
с дополнительно заданным в блоке 4 пороговым напряжением, соответствующим Uз, и сформировать на выходе блока 4 сигнал S(t) Uк, изображенный на фиг. 2, что соответствует реализации уравнения 3.
Реализация заданного алгоритма требует, что интегратор 2 должен иметь выходное напряжение
которое выполняется для моментов времени ti nT, где n номер такта. Под обнулением интегратора следует понимать только процесс установления постоянной составляющей, обусловленной наличием дрейфа операционного усилителя, на котором реализован интегратор.
Для устранения постоянной составляющей интегратор снабжен схемой выборки и хранения, которая поддерживает на выходе интегратора значение интеграла (9) для моментов времени nT. Интегратор же обнуляется перед каждым тактом работы (установка нуля интегратора) ключей так, что начинает интегрировать входное напряжение ε(t)=ε(nTi) с минимальной ошибкой, так как схема выборки и хранения алгебраически складывает напряжение, соответствующее окончанию предыдущего такта Т с текущим значением, таким образом на выходе интегратора формируется сигнал ε(t)=Uoc изображенный на фиг. 2 с минимальной ошибкой. Включение нечетных вентилей (сигнал  ) осуществляется только тогда, когда на выходе блока 4 устанавливается сигнал, равный "логическому нулю", а генератор 6 формирует тактовый импульс. Выключение этих же вентилей осуществляется по тактовому импульсу генератора 6 при наличии "логической единицы" на выходе блока 4. В противофазе работают четные ключи (сигнал iч). Этот процесс и изображен на фиг. 2.
) осуществляется только тогда, когда на выходе блока 4 устанавливается сигнал, равный "логическому нулю", а генератор 6 формирует тактовый импульс. Выключение этих же вентилей осуществляется по тактовому импульсу генератора 6 при наличии "логической единицы" на выходе блока 4. В противофазе работают четные ключи (сигнал iч). Этот процесс и изображен на фиг. 2.
Переключение ключей инвертора осуществляется только в те моменты, когда сигнал на выходе интегратора удовлетворяет выражению (3). Выполнение этого условия реализует блок 4. Если же сигнал обратной связи выходит за уровень D, то блок 3 формирует сигнал на изменение длительности периода Tопт.. В приведенной на фиг. 2 временной диаграмме эту ситуацию наиболее наглядно поясняет формирование интервалов Tх1 и Tх3. В момент времени nT 16T и nT 23T сигнал Uос не покидает области D, а устройство осуществляет переключение вентилей  соответственно.
соответственно.
Уровень D может быть установлен и шире того значения, которое приведено на фиг. 2. От его выбора зависит общая ошибка слежения. На фиг. 2 приведено минимальное его значение, которое может быть выбрано при реализации способа. При этом возникают потери мощности в вентилях. Но этот режим неосвоенный, поэтому средние потери мощности увеличиваются незначительно. Переменный период тактовых импульсов позволяет расширять динамический диапазон и облегчать режим работы вентилей. Обнуление интегратора в начале каждого такта ослабляет влияние на точность дрейфа нуля интегратора, что повышает точность слежения.
Данный способ может быть применен для регулирования тока в обмотке трехфазного асинхронного двигателя, а устройство реализовано на существующей в настоящее время электронной базе.
Данный способ может быть применен для регулирования тока в обмотке трехфазного асинхронного двигателя, а устройство реализовано на существующей в настоящее время электронной базе.
Устройство может быть реализовано на следующих элементах: интегратор 2, суммирующий элемент 1, схема формирования синхронизирующих импульсов 3, фильтры 12, 13 на микросхемах типа 140УД7 или 140УД10; компаратор 4 на микросхеме 252СА1, схема формирования импульсов управления вентилями 5 и синхронизируемый генератор тактовых импульсов 6 на микросхемах 155 или 555 серии, вентили 7 10 на транзисторах типа КТ838.
Технико-экономические преимущества заявленного способа управления мостовым инвертором напряжения по сравнению с прототипом заключаются в том, что инвертор обеспечивает более высокую точность слежения за выходным сигналом, расширяется динамический диапазон по сигналу задания, при этом большую часть времени вентили работают в оптимальном режиме, что облегчает их тепловой режим, продлевая срок службы, а также более рационально использует источник питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1992 |
|
RU2017311C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1992 |
|
RU2017312C1 |
| Способ управления инвертором напряжения | 1988 |
|
SU1615851A1 |
| Способ управления инвертором напряжения | 1986 |
|
SU1403301A1 |
| Способ управления многофазным инвертором напряжения | 1988 |
|
SU1603507A1 |
| Способ управления инвертором напряжения | 1989 |
|
SU1679590A1 |
| Способ управления автономным инвертором напряжения | 1986 |
|
SU1367115A1 |
| СПОСОБ ПОВЕРКИ ПРЕОБРАЗОВАТЕЛЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2060585C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ОБЪЕКТА | 1998 |
|
RU2166182C2 |
Использование: изобретение относится к электротехнике и может быть использовано в мостовых инверторах напряжения, предназначенных для частотно-регулируемого электропривода. В электроприводе переменного тока с частотно-токовым управлением важная задача - повышение точности регулирования выходного тока и расширение динамического диапазона по сигналу задания. Сущность изобретения заключается в том, что формируют сигнал задания и сигнал обратной связи, формируют сигнал ошибки и определяют его знак, а также формируют тактовые импульсы стабильной частоты, в момент их формирования запоминают знак сигнала ошибки и при его изменении формируют сигналы переключения вентилей мостового инвертора, сигнал обратной связи формируют пропорционально мгновенному значению напряжения на нагрузке, в соответствующие интервалы каждой пары вентилей мостового инвертора, обнуляют интегратор и изменяют период тактовых импульсов в зависимости от величины интеграла от ошибки, полученный сигнал обратной связи фильтруют и сравнивают с сигналом задания, интегрируют их разность, а полученный сигнал используют в качестве сигнала ошибки. 2 ил.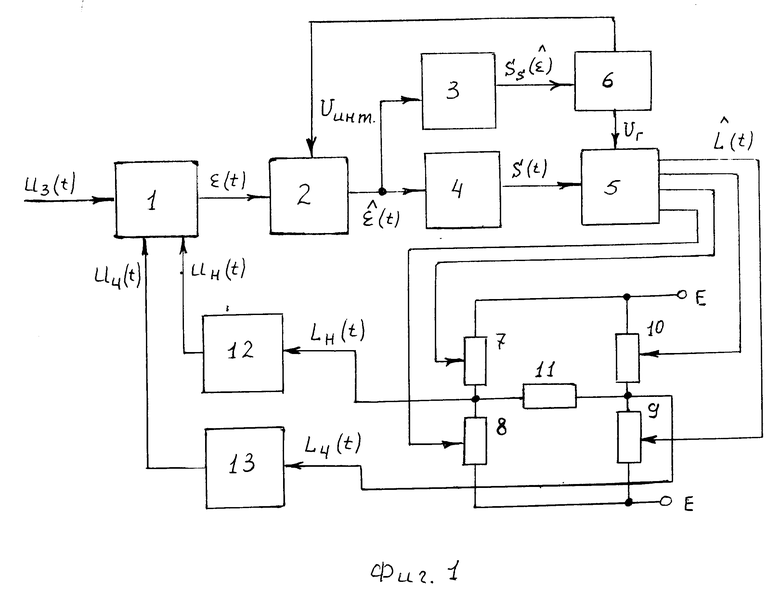
Способ управления мостовым инвертором, по которому формируют сигнал задания, формируют сигнал обратной связи пропорционально мгновенному значению напряжения на нагрузке, сравнивают его с сигналом задания, формируют сигнал ошибки путем интегрирования с помощью интегратора разности сигнала задания и сигнала обратной связи, определяют его знак, формируют тактовые импульсы через заданный период, в момент их формирования запоминают знак сигнала ошибки и после его изменения в момент наличия тактового импульса формируют сигнал переключения вентилей мостового инвертора, отличающийся тем, что сравнивают сигнал ошибки с дополнительно сформированным пороговым напряжением и в момент выхода сигнала ошибки за границы порогового напряжения формируют очередной тактовый импульс через период времени меньший заданного, кроме того, в момент прохождения тактового импульса устанавливают интегратор в начальное состояние.
| Способ управления инвертором напряжения | 1986 |
|
SU1403301A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
