Изобретение относится к преобразовательной технике и может быть использовано в инверторах напряжения, предназначенных для частотно-регулируемого электропривода.
Целью изобретения является увеличение КПД инвертора за счет уменьшения потерь на переключение и уменьшение потерь в двигательной нагрузке за счет использования однополярных импульсов напряжения в процессе формирования полупериода выходного тока при сохранении высокой точности регулирования выходного тока.
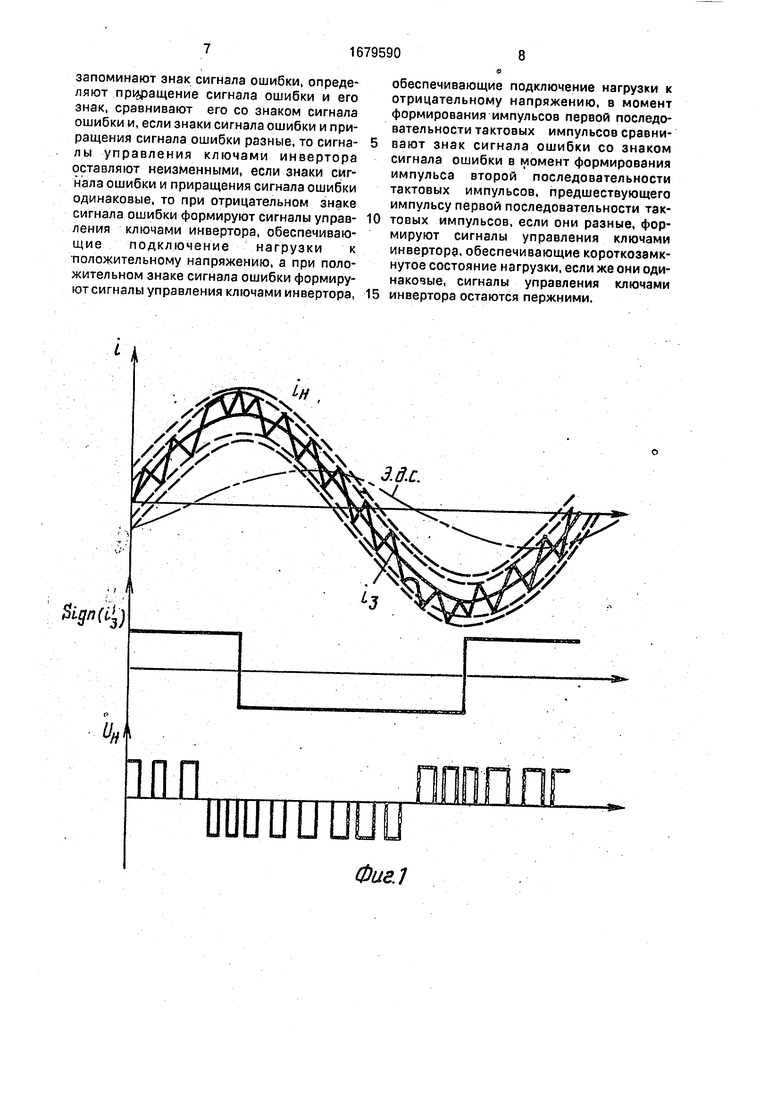
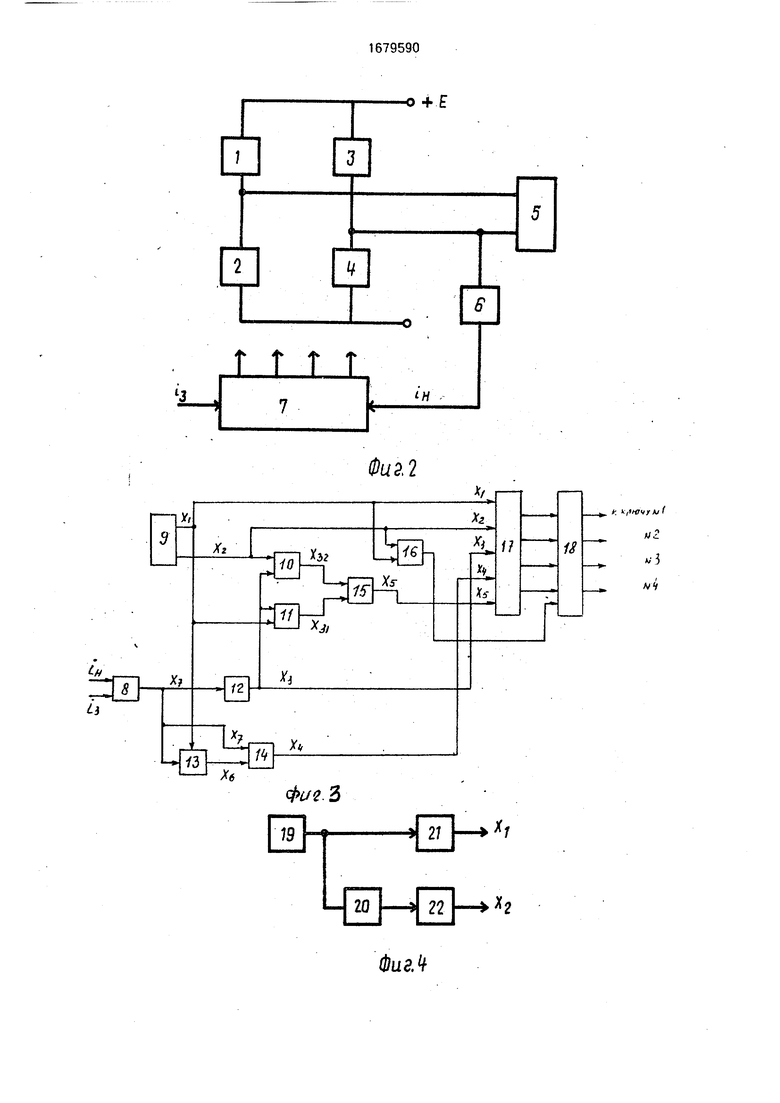
На фиг.1 представлены диаграммы тока и напряжения на элементах схемы; на фиг.2 - функциональная схема инвертора, реализующего предлагаемый способ; на фиг.З - схема блока управления инвертором; на фиг.4 блок-схема генератора импульсов; на фиг.5 - эпюры, поясняющие работу блоку управления.
Устройство (фиг.2), реализующее предлагаемый способ, содержит инвертор напряжения, выполненный на четырех ключах 1-4, каждый из которых содержит транзистор, шунтированный обратным диодом, нагрузку 5, датчик 6 мгновенного значения тока нагрузки, блок 7 управления инвертором, формирующий сигналы управления ключами 1-4 инвертора. Блок управления (фиг.З) содержит аналоговый сумматор 8, генератор 9 тактовых импульсов, D-триггеры 10 и 11 со счетным входом, компаратор 12, устройство 13 выборки и хранения компаратор 14, логический элемент ИЛИ 15, сумматор 16, программируемое запоминающее
О
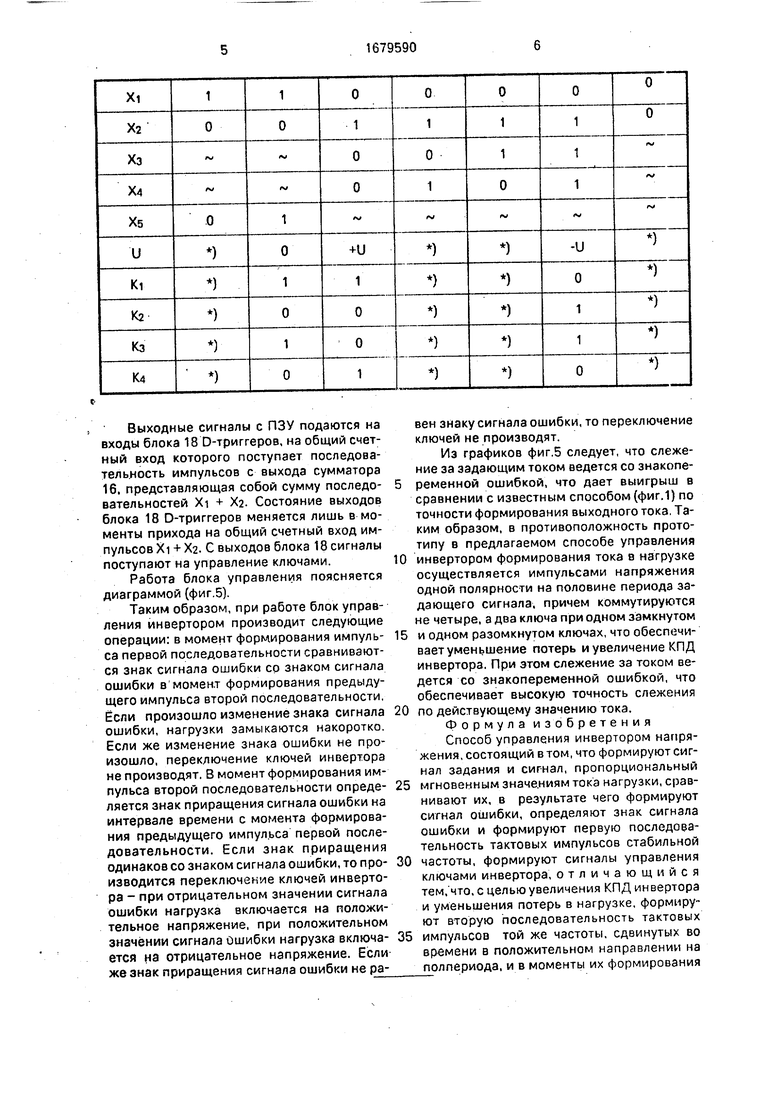
VI о ел ю о
устройство (ПЗУ) 17, блок 18 из четырех D- триггеров, с общим счетным входом. На один из входов аналогового сумматора 8 подается сигнал задания 3, а на второй его вход сигнал н с датчика б тока. Выход аналогового сумматора соединен с одним из входов схемы 13 выборки и хранения, с одним из входов компаратора 14 и с входом компаратора 12. Выход компаратора 12 соединен с информационными входами D- триггеров 10 и 11 и с третьим входом ПЗУ 17. Выход компаратора 14 соединен с четвертым входом ПЗУ 17. Выход импульсов первой последовательности генератора 9 соединен с входом схемы 13 выборки и хранения, с входом сумматора 16, с счетным входом триггера 11 и с первым входом ПЗУ 17, Выход импульсов Х2 второй последовательности генератора 9 соединен со счет- ным входом триггера 10, с входом сумматора 16 и с вторым входом ПЗУ 17. Выход сумматора 16 соединен с общим счетным входом блока 18 D-триггеров. Выходы ПЗУ 17 соединены с входами блока 18 D-триггеров, выходные сигналы которого подаются на управление ключами 1-4 инвертора. Блок-схема генератора 9 первой Xi и второй Х2 последовательностей импульсов изображена на фиг.4. Генератор состоит из мультивибратора 19, схемы НЕ 20 и одно- вибраторов 21 и 22, срабатывающих по перепаду входного сигнала 0/1. Выход мультивибратора 19 соединен с входом одно- вибратора 21 и с входом схемы НЕ 20, выход которой соединен с входом одновибратора 22. На выходе одновибратора 21 формируется первая последовательность импульсов Xi, а на выходе одновибратора 22 - вторая последовательность импульсов Х2.
Устройство, реализующее предложенный способ управления инвертором напряжения, работает следующим образом.
Аналоговый сумматор 8, на входы которого подаются сигнал задания, определяющий амплитуду и частоту тока в нагрузке, и сигнал обратной связи по мгновенному значению тока нагрузки, вырабатывает сигнал ошибки регулирования тока нагрузки
Х7 ,
который подается на компаратор 12. На выходе компаратора 12 появляется сигнал логической единицы Х3 1, если X 0, и логического нуля Хз 0, если Х 0. Генератор 9 вырабатывает первую последовательность тактовых импульсов Xi и вторую последовательность Ха, следующих с той же частотой и сдвинутых относительно первой на половину периода тактовой частоты. В
момент формирования импульса первой последовательности Xt устройство 13 выборки и хранения запоминает величину и знак ошибки X. сигнал Хе на его выходе остается (
неизменным до прихода следующего импульса Xi. Одновременно тактовый импульс Xi поступает на счетный вход D-триггера 11, и его состояние (сигнал Хз1) меняется в соответствии с сигналом Хз, подаваемым на
его вход:
Хзт 1, если Xi 1 и Хз 1 Хз1 0, еслиХ1 1 иХз 0.
Состояние Хзт триггера 11 остается неизменным до прихода следующего импульса XL
Компаратор 14 сравнивает текущее значение сигнала X со значением сигнала X в
момент формирования импульса XL Таким образом, на выходе компаратора 14 появляется сигнал Х4, определяющий знак приращения сигнала ошибки X на интервале tT4i + t, где Т.Т41 - время прихода тактового
импульса Xi; t - текущее значение времен.
Если X(tT4i) - Хт(г) 0, то ХА 1, если X(tT4l) - X(t) 0, то Х4 0.
В момент формирования импульса второй последовательности D-триггер 10 запоминает знак сигнала Хз, т.к. импульс Х2 подается на его счетный вход, а сигнал Хз на его информационный вход.
Состояние триггера 10 определяется следующими условиями:
40
Хз2 1, если Х2 1 и Хз 1, Хз2 0, если Х2 1 и Хз 0.
Состояние Хз2 триггера 10 остается неизменным до прихода следующего импульса Х2. Выходы триггеров 10 и 11 объхединены по схеме ИЛИ 15. На выходе
5 элемента ИЛИ 15 сигнал Xs 1, если на интервале между приходом импульсов первой и второй последовательностей произошло изменение знака сигнала ошибки. Если изменение знака не произошло, то
0 ХБ 0. Таким образом, сформированные цифровые сигналы Xi-Xs подаются на адресные входы ПЗУ 17, которое предварительно программируется в соответствии с таблицей, где знаком обозначено без5 различное состояние переменной, а знаком ) - прежнее состояние ключей инвертора и соответствующее ему напряжение U на нагрузке. При этом включенное состояние ключа обозначено 1, выключенное - 0.
Выходные сигналы с ПЗУ подаются на входы блока 18 D-триггеров, на общий счетный вход которого поступает последовательность импульсов с выхода сумматора 16. представляющая собой сумму последовательностей Xi + Ха. Состояние выходов блока 18 D-триггеров меняется лишь в моменты прихода на общий счетный вход импульсов Xi + Х2. С выходов блока 18 сигналы поступают на управление ключами.
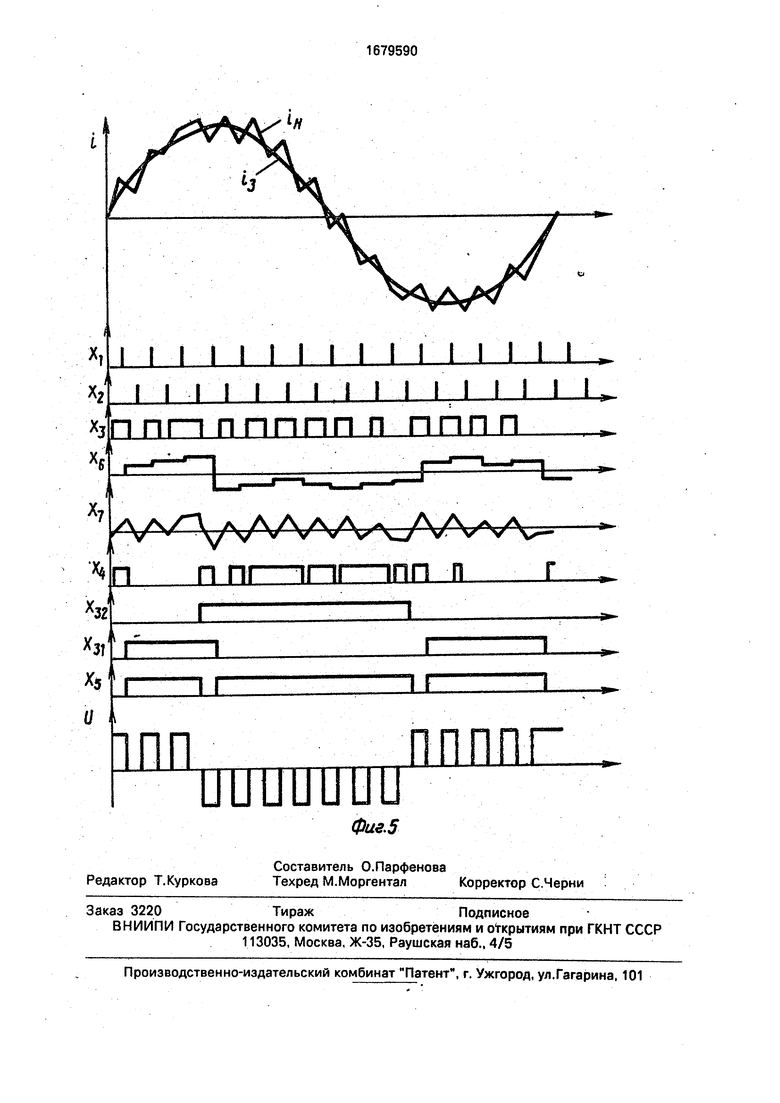
Работа блока управления поясняется диаграммой (фиг 5)
Таким образом, при работе блок управления инвертором производит следующие операции: в момент формирования импульса первой последовательности сравниваются знак сигнала ошибки со знаком сигнала ошибки в момент формирования предыдущего импульса второй последовательности Если произошло изменение знака сигнала ошибки, нагрузки замыкаются накоротко Если же изменение знака ошибки не произошло, переключение ключей инвертора не производят. В момент формирования импульса второй последовательности определяется знак приращения сигнала ошибки на интервале времени с момента формирования предыдущего импульса первой последовательности. Если знак приращения одинаков со знаком сигнала ошибки, то производится переключение ключей инвертора - при отрицательном значении сигнала ошибки нагрузка включается на положительное напряжение, при положительном значении сигнала Ошибки нагрузка включается на отрицательное напряжение. Если же знак приращения сигнала ошибки не равен знаку сигнала ошибки, то переключение ключей не производят.
Из графиков фиг 5 следует, что слежение за задающим током ведется со знакопеременной ошибкой, что дает выигрыш в сравнении с известным способом (фиг.1) по точности формирования выходного тока Таким образом, в противоположность прототипу в предлагаемом способе управления
инвертором формирования тока в нагрузке осуществляется импульсами напряжения одной полярности на половине периода задающего сигнала, причем коммутируются не четыре, а два ключа при одном замкнутом
и одном разомкнутом ключах, что обеспечивает уменьшение потерь и увеличение КПД инвертора. При этом слежение за током ведется со знакопеременной ошибкой, что обеспечивает высокую точность слежения
по действующему значению тока.
Формула изобретения Способ управления инвертором напряжения, состоящий в том, что формируют сигнал задания и сигнал, пропорциональный
мгновенным значениям тока нагрузки, сравнивают их, в результате чего формируют сигнал ошибки, определяют знак сигнала ошибки и формируют первую последовательность тактовых импульсов стабильной
частоты, формируют сигналы управления ключами инвертора, отличающийся тем, что, с целью увеличения КПД инвертора и уменьшения потерь в нагрузке, формируют вторую последовательность тактовых
импульсов той же частоты, сдвинутых во времени в положительном направлении на полпериода, и в моменты их формирования
запоминают знак сигнала ошибки, определяют прруэащение сигнала ошибки и его знак, сравнивают его со знаком сигнала ошибки и, если знаки сигнала ошибки и приращения сигнала ошибки разные, то сигна- лы управления ключами инвертора оставляют неизменными, если знаки сигнала ошибки и приращения сигнала ошибки одинаковые, то при отрицательном знаке сигнала ошибки формируют сигналы управления ключами инвертора, обеспечивающие подключение нагрузки к положительному напряжению, а при положительном знаке сигнала ошибки формируют сигналы управления ключами инвертора,
0
5
обеспечивающие подключение нагрузки к отрицательному напряжению, в момент формирования импульсов первой последовательности тактовых импульсов сравнивают знак сигнала ошибки со знаком сигнала ошибки в момент формирования импульса второй последовательности тактовых импульсов, предшествующего импульсу первой последовательности тактовых импульсов, если они разные, формируют сигналы управления ключами инвертора, обеспечивающие короткозамк- нутое состояние нагрузки, если же они одинаковые, сигналы управления ключами инвертора остаются пержними.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ M-ФАЗНЫМ ИНВЕРТОРОМ | 1990 |
|
RU2013851C1 |
| Способ управления многофазным инвертором напряжения | 1988 |
|
SU1603507A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Кодер телевизионного сигнала | 1990 |
|
SU1753596A2 |
| Устройство для компенсации реактивной мощности | 1990 |
|
SU1746463A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Декодирующее устройство | 1989 |
|
SU1681388A1 |
| Устройство для управления инвертором с многоуровневым выходным напряжением | 1985 |
|
SU1304153A1 |
| Регулируемое устройство для симметрирования тока трехфазной нагрузки | 1982 |
|
SU1032525A1 |
| Способ цифрового управления многофазным инвертором | 1989 |
|
SU1683154A1 |
Изобретение предназначено для использования в электроприводе переменного тока с частотно-токовым управлением. Целью способа является повышение точности регулирования выходного тока. В способе управления инвертором напряжения определяют знак сигнала ошибки, формируют первую и вторую последовательности тактовых импульсов той же частоты, сдвинутых во времени на полпериода относительно тактовых импульсов первой последовательности, и в моменты их формирования запоминают знак сигнала ошибки, определяют приращение сигнала ошибки и его знак, сравнивают знак приращения ошибки со знаком сигнала ошибки и в зависимости от знака сигнала ошибки и знака приращения сигнала ошибки формируют сигналы переключения ключей инвертора. При этом регулирование выходного тока всегда осуществляется со знакопеременной ошибкой, а формирование тока осуществляется одно- полярными импульсами напряжения. 5 ил. (Л С
ЯдаЩ)
тиши
Фие.1
Ч
Т
г г г т
o + E
Фи2,2
I- k/IHJVrKJ (
н2
и
ЫН
ФигЛ
I I I I i I I I I I I I I I I i .
I I I I l I j J i i I i l i I
x
xJn nri ппппп п пппп
| Бродовский В.Н | |||
| Приводы с частотно- токовым управлением | |||
| М. | |||
| Энергия, 1974 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Устройства преобразовательной техники | |||
| Сборник, вып.4, Киев, 1970, с.113-122 | |||
