Изобретение относится к устройствам управления, преимущественно для ракетно-космической техники.
Известна рулевая машина (PM), включающая трехшестеренный насос, электромеханический преобразователь, качалку, снабженную пружиной, золотники, закрепленные на качалке и размещенные в полых валах ведомых шестерен трехшестеренного насоса, являющихся гильзами. [1, с. 403, фиг. 9.21]
Недостатком указанной конструкции PM является пониженная надежность в условиях воздействия вибрации и перегрузок вследствие деформаций или обрыва упругого элемента, связывающего качалку с валом электромеханического преобразователя.
Наиболее близким к предложенному техническому решению прототипом является PM, описанная в патенте РФ N 2014246, включающая трехшестеренный насос, электромеханический преобразователь, качалку, установленную на валу электромеханического преобразователя и снабженную пружиной, золотники, закрепленные на качалке и размещенные в полых валах ведомых шестерен трехшестеренного насоса, являющихся гильзами.
Недостатком указанной конструкции является недостаточная виброустойчивость, т.к. вал электромеханического преобразователя консольно нагружен весом качалки с золотниками и элементами крепления. При воздействии вибрации это приводит к неустойчивой работе РМ, т.к. при одном и том же управляющем сигнале на электромеханическом преобразователе золотники открывают неодинаковые управляющие отверстия в гильзах, связанные с гидравлическими магистралями РМ.
Техническим результатом изобретения является повышение виброустойчивости РМ.
Технический результат достигается тем, что РМ, включающая трехшестеренный насос, электромеханический преобразователь, качалку, установленную на валу электромеханического преобразователя и снабженную пружиной, золотники, закрепленные на качалке и размещенные в полых валах ведомых шестерен трехшестеренного насоса, являющихся гильзами, в отличие от прототипа, снабжена кронштейном, на котором установлен электромеханический преобразователь и закреплен конец пружины, и дополнительным валом, один конец которого закреплен на качалке, а противоположный конец установлен в подшипнике, закрепленном на кронштейне между электромеханическим преобразователем и пружиной, при этом ось дополнительного вала совмещена с осью вала электромеханического преобразователя.
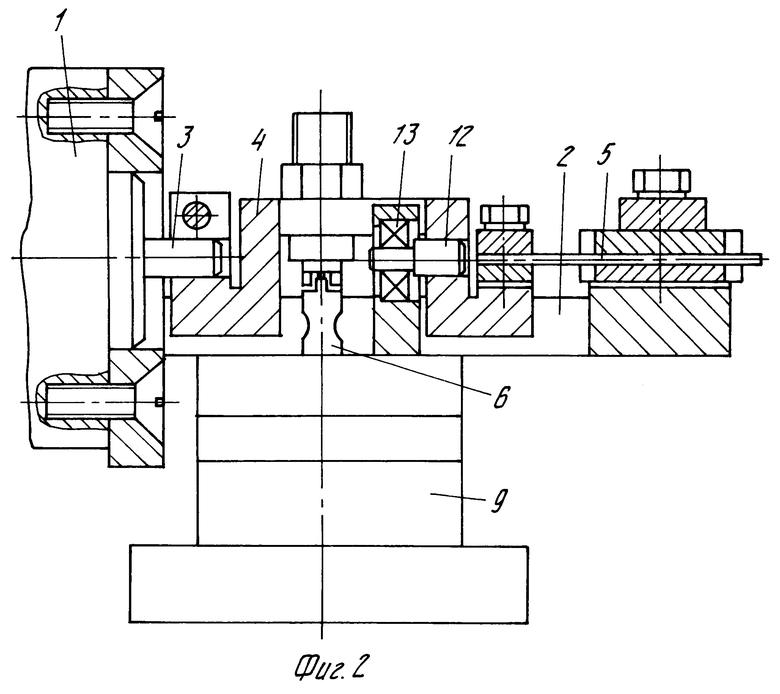
На фиг. 1 представлена конструктивная схема РМ; на фиг. 2 компоновка электромеханического преобразователя, качалки с золотниками, пружиной и дополнительным валом на кронштейне; на фиг. 3 приближенная схема нагружения вала электромеханического преобразователя с качалкой.
РМ включает электромеханический преобразователь 1, установленный на кронштейне 2. На валу 3 электромеханического преобразователя 1 жестко закреплена качалка 4, на которой закреплен один конец плоской пружины 5, другой конец пружины закреплен на кронштейне 2. На качалке 4 установлены два золотника 6 посредством упругих элементов 7, размещенные в полых валах 8 трехшестеренного насоса 9, в валах 8 имеются радиальные отверстия 10, связанные гидравлическими магистралями с силовым механизмом 11. На качалке 4 закреплен один конец дополнительного вала 12, другой конец вала 12 установлен в подшипнике 13, закрепленном на кронштейне 2. Кронштейн 2 установлен на трехшестеренном насосе 9.
При подаче управляющего тока на обмотку электромеханического преобразователя 1, установленного на кронштейне 2, выходной вал 3 преобразователя 1 поворачивается на определенный угол, качалка 4, жестко закрепленная на валу 3, поворачивается на тот же угол, при этом позиционная нагрузка на валу 3 в функции управляющего тока создается плоской пружиной 5. При повороте качалки 4 золотники 6 сохраняют вертикальное положение за счет изгиба упругих элементов 7, причем один из золотников 6 движется вверх, а другой вниз, внутри валов 8 трехшестеренного насоса 9, открывая или перекрывая радиальные отверстия 10, связанные гидравлическими магистралями с силовым механизмом 11, что создает на его поршне перепад давлений и приводит к перемещению выходного штока. Для уменьшения колебаний золотников 6 и снижения нагрузки на подшипники электромеханического преобразователя 1, на конце качалки 4, противоположном преобразователю 1, установлен дополнительный вал 12, снабженный дополнительной опорой на кронштейн 2 через подшипник 13. Соосность дополнительного вала и вала электромеханического преобразователя обеспечивается обработкой за один установ посадочного отверстия под преобразователь 1 и отверстия под подшипник 13, что необходимо для снижения нагрузки на подшипники и предотвращения заклинивания.
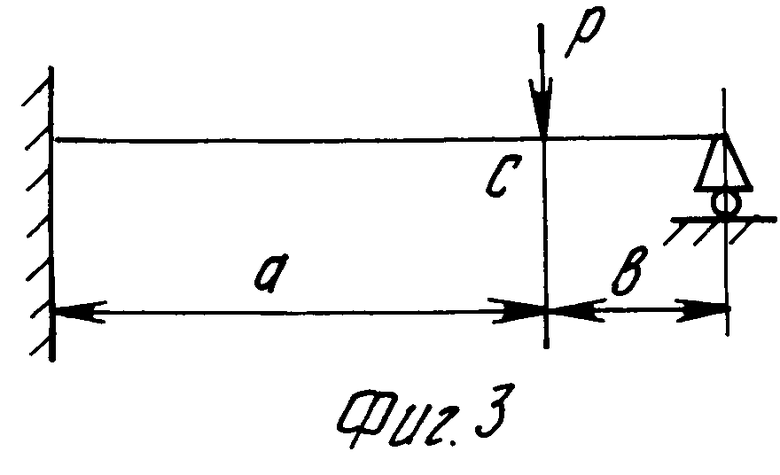
Для предложенной конструкции РМ приближенная схема нагружения вала электромеханического преобразователя с качалкой (фиг. 3) балка, защемленная одним концом и опертая другим. Принимая допущение, что сосредоточенная нагрузка P, равная весу золотников с элементами крепления, приложена в точке C (точка пересечения оси вала электромеханического преобразователя и плоскости, проходящей через оси золотников) без учета распределенной нагрузки, равной весу качалки, прогиб балки (фиг. 3) в точке C определяется соотношением:
где fc1 прогиб балки;
P нагрузки;
a расстояние от подшипника вала электромеханического преобразователя до точки C;
b расстояние от подшипника дополнительной опоры до точки C;
EJ изгибная жесткость балки
[2, с. 447-448] Для балки той же длины и жесткости, с той же точкой приложения нагрузки P, но нагруженной консольно, как в прототипе, прогиб fc2 определяется соотношением:
[2, с. 355-356]
При fc2>fc1 предложенная конструкция имеет преимущество перед прототипом в части уменьшения перемещения золотников под действием вибраций и перегрузок.
fc1<fc2
3ab2 + 4b3<4a3 + 12a2b + 12ab2 + 4b3
4a3 + 12a2b + 9ab2>0
a(4a2 + 12ab + 9b2)>0
a(2a + 3b)2>0
т.к. a>0; (2a + 3b)2>0, то при любых соотношениях a и b
fc1 <fc2
В случае расположения дополнительной опоры между точкой C, в которой приложена сосредоточенная нагрузка P, и электромеханическим преобразователем при тех же допущениях и той же жесткости балки, ее прогиб fc3 в точке C определяется соотношением:
в этом случае fc3<fc2, т.к. a>b.
Следовательно при любом расположении дополнительной опоры по длине качалки прогиб C у предложенной конструкции меньше, чем у прототипа.
Размещение дополнительной опоры между точкой C и электромеханическим преобразователем конструктивно затруднено, поэтому дополнительная опора располагается между точкой C и пружиной, предпочтительно a/2≅b≅a, т.к. при больших значениях b качалка теряет жесткость.

Следовательно для одного и того же прогиба в предложенной конструкции необходимо усилие в 4-10 раз больше, чем в прототипе, т.е. предложенная конструкция во столько же раз более устойчива к вибрациям и перегрузкам.
Одновременно в ней снижена нагрузка на подшипники электромеханического преобразователя за счет введения дополнительной опоры.
Литература:
1. Феодосьев В.И. Синярев Г.Б. Введение в ракетную технику. М. Оборонгиз, 1960.
2. Беляев Н.М. Сопротивление материалов. М. Физматгиз, 1959.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131827C1 |
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131377C1 |
| РУЛЕВАЯ МАШИНА | 1994 |
|
RU2083947C1 |
| РУЛЕВАЯ МАШИНА | 2007 |
|
RU2351883C2 |
| РУЛЕВАЯ МАШИНА И СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 1998 |
|
RU2131580C1 |
| РУЛЕВАЯ МАШИНА | 1999 |
|
RU2148776C1 |
| СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 2001 |
|
RU2187779C1 |
| ЗОЛОТНИКОВЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ | 1992 |
|
RU2049938C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2067226C1 |
| УЗЕЛ КРЕПЛЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА | 1996 |
|
RU2114331C1 |
Использование: ракетно-космическая техника, устройства управления. Сущность изобретения: рулевая машина, содержащая трехшестеренный насос, электромеханический преобразователь, на валу которого установлена снабженная пружиной качалка, закрепленные на качалке золотники, размещенные в полых валах ведомых шестерен трехшестеренного насоса. Она снабжена кронштейном, на котором установлен электромеханический преобразователь и закреплен конец пружины, а также дополнительным валом, один конец которого закреплен на качалке, а другой установлен в подшипнике, закрепленном на кронштейне между электромеханическим преобразователем и пружиной, при этом ось дополнительного вала совмещена с осью вала электромеханического преобразователя. 3 ил.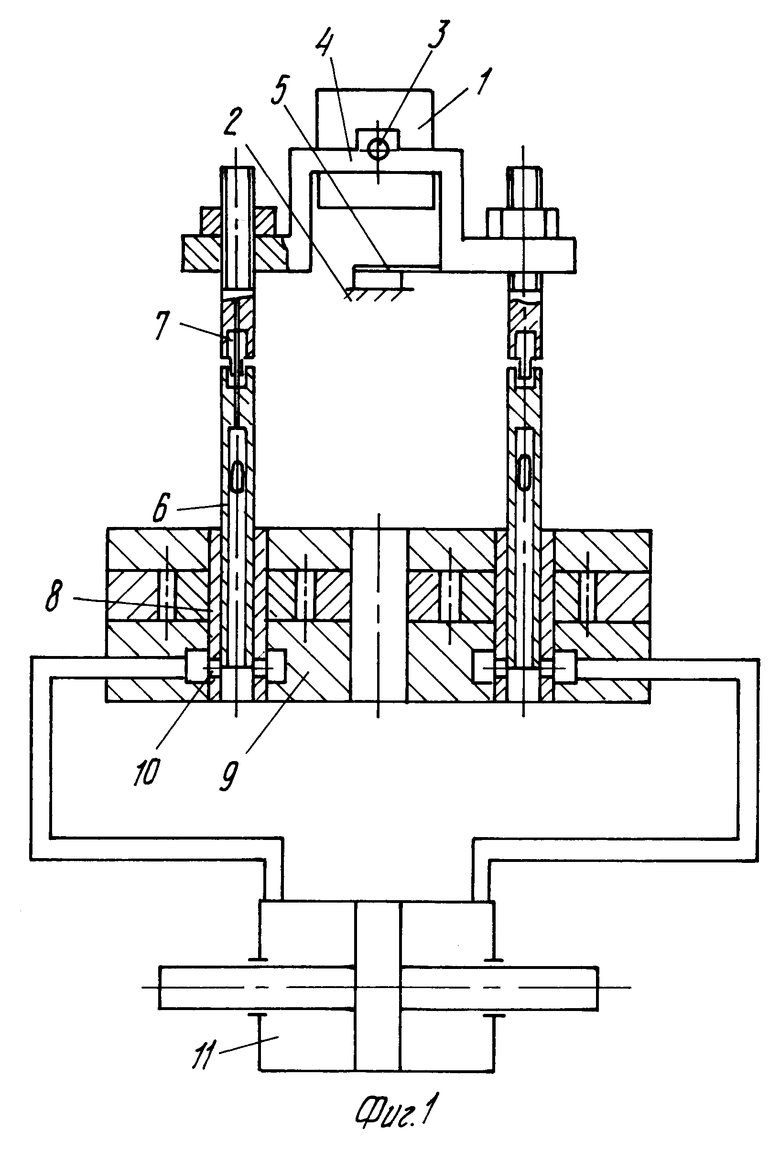
Рулевая машина, содержащая трехшестеренный насос, электромеханический преобразователь, качалку, установленную на валу электромеханического преобразователя и снабженную пружиной, золотники, закрепленные на качалке и размещенные в полых валах ведомых шестерен трехшестеренного насоса, являющихся гильзами, отличающаяся тем, что она снабжена кронштейном, на котором установлен электромеханический преобразователь и закреплен конец пружины, и дополнительным валом, один конец которого закреплен на качалке, а противоположный установлен в подшипнике, закрепленном на кронштейне между электромеханическим преобразователем и пружиной, при этом ось дополнительного вала совмещена с осью вала электромеханического преобразователя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Феодосьев В.И., Синярев Г.В | |||
| Введение в ракетную технику | |||
| - М.: Оборонгиз, 1960, с | |||
| Способ включения усилителя в трансляцию | 1923 |
|
SU403A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РУЛЕВОЙ ПРИВОД | 1991 |
|
RU2014246C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
