Изобретение относится к устройствам управления, преимущественно для ракетно-космической техники.
Известна рулевая машина (РМ), включающая управляющее устройство, два нерегулируемых источника питания, два регулируемых гидравлических сопротивления, силовой механизм. А также способ сборки РМ, включающий приведение в действие насосов и регулировку скорости силового механизма путем регулировки гидравлических сопротивлений [1].
Недостатком указанных РМ и способа сборки РМ является недостаточная чувствительность и трудность согласования управляющего сигнала со скоростью силового механизма.
Наиболее близким к предложенной конструкции прототипом является РМ [2], содержащая корпус с размещенным в нем трехшестеренным насосом, выполненным с полыми валами ведомых шестерен, электромеханический преобразователь, управляющее устройство, включающее качалку, жестко связанную с валом электромеханического преобразователя посредством цангового зажима, и плунжеры, закрепленные крепежными элементами на качалке, причем плунжеры размещены в полых валах ведомых шестерен насоса, являющихся гильзами.
Наиболее близким к предложенному способу-прототипу является способ сборки РМ, описанный в (2), включающий заполнение корпуса рабочей жидкостью, приведение во вращение трехшестеренного насоса, подачу на электромеханический преобразователь управляющего сигнала, замер скорости и регулирование ее перемещением плунжеров относительно качалки.
Недостатком указанных конструкции РМ и способа сборки РМ является недостаточная виброустойчивость и несоответствие скорости РМ управляющему сигналу при действии перегрузок, вызванное дебалансом управляющего устройства, обусловленным разбросом допусков на размеры деталей при изготовлении.
Техническим результатом настоящего изобретения является повышение виброустойчивости и стабилизации скорости РМ при действии перегрузок.
Технический результат достигается тем, что в РМ, содержащей корпус, силовой механизм с выходным валом, размещенные в корпусе трехшестеренный насос, выполненный с полыми валами ведомых шестерен, и управляющее устройство, включающее электромеханический преобразователь качалку, жестко связанную с валом электромеханического преобразователя посредством узла крепления, и плунжеры, закрепленные крепежными элементами на качалке, причем плунжеры размещены в полых валах ведомых шестерен насоса, являющихся гильзами, в отличие от прототипа качалка снабжена балансировочным устройством, размещенным симметрично относительно плоскости, проходящей через ось вращения качалки и ось ведущей шестерни насоса. Балансировочное устройство предлагается выполнить в виде шпильки, установленной в отверстии качалки, перпендикулярном ее плоскости симметрии, и контргаек, закрепленных на шпильке по обе стороны от плоскости симметрии качалки. Узел крепления качалки предлагается выполнить в виде цангового зажима, в котором цанга стянута шпилькой и контргайками балансировочного устройства, при этом паз цангового зажима качалки выполнить в плоскости ее симметрии.
Технический результат достигается тем, что в способе сборки рулевой машины, включающем заполнение корпуса рабочей жидкостью, приведение во вращение трехшестеренного насоса, подачу на электромеханический преобразователь управляющего сигнала, замер скорости выходного вала силового механизма, регулирование ее перемещения плунжеров относительно качалки, в отличие от прототипа перед заполнением корпуса рабочей жидкостью управляющее устройство балансируют относительно плоскости симметрии качалки, причем балансировку осуществляют путем изменения массы контргаек и перемещением шпильки в отверстии качалки относительно ее плоскости симметрии, после чего устанавливают узел управления в корпус, при этом обеспечивают совмещение плоскости симметрии качалки с плоскостью, проходящей через ось вращения качалки и ось ведущей шестерни насоса при отсутствии управляющего сигнала на электромеханическом преобразователе. Балансировку предлагается осуществлять при перегрузке, действующей на корпус рулевой машины в направлении осей плунжеров.
Выполнение отличительных признаков устройства и способа позволяет повысить виброустойчивость РМ и стабилизировать скорость РМ при действии перегрузок. Балансировка под действием перегрузки позволяет повысить точность балансировки.
В заявке описана группа изобретений, объединенных единым изобретательским смыслом.
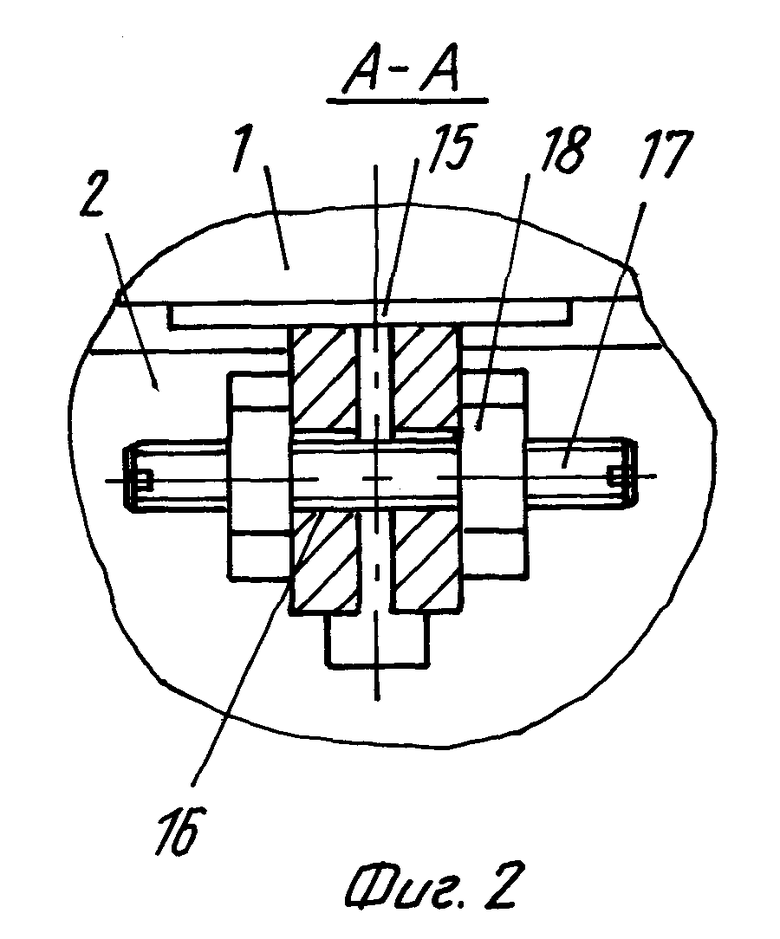
На фиг. 1 представлена общая конструктивная схема РМ; на фиг. 2 разрез по А-А.
РМ включает электромеханический преобразователь 1, например электромагнитное реле поворотного типа, управляющее устройство, включающее качалку 2, жестко связанную с валом преобразователя 1, нагруженную плоской пружиной 3, золотниковые плунжеры 4, состоящие из двух частей, соединенных упругим элементом 5, например проволокой или тросом, закрепленные на качалке 2 крепежными элементами 6. Плунжеры 4 размещены в полых валах ведомых шестерен 7 трехшестеренного насоса 8, находящихся в зацеплении с ведущей шестерней 9, связанной с электродвигателем 10. В валах ведомых шестерен 7 выполнены радиальные отверстия 11, связанные гидравлическими магистралями 12 с полостью корпуса 13 и с силовым механизмом 14. На качалке 2 в плоскости ее симметрии, проходящей через ось вращения качалки 2 и ось ведущей шестерни 9 насоса 8, выполнен паз 15 до пересечения с посадочным отверстием для крепления на валу преобразователя 1, в стенках паза выполнено отверстие 16, перпендикулярное плоскости паза. В отверстии установлена шпилька 17, а на ней контргайки 18.
При подаче управляющего тока на обмотку электромеханического преобразователя 1 его выходной вал поворачивается на определенный угол, качалка 2, жестко связанная с ним, поворачивается на тот же угол. Позиционная нагрузка на валу преобразователя 1 создается плоской пружиной 3. При этом за счет изгиба упругих элементов 5 плунжеры 4, зафиксированные на качалке 2 крепежными элементами 6, движутся внутри полых валов ведомых шестерен 7 трехшестеренного насоса 8, причем один плунжер движется вверх, открывая радиальные отверстия 11, а другой - вниз, перекрывая радиальные отверстия 11, что через магистрали 12 создает перепад давлений рабочей жидкости, всасываемой из полости корпуса 13, в полостях силового механизма 14 и приводит в движение выходной вал. Ведомые шестерни 7 приводятся во вращение ведущей шестерней 9 от электродвигателя 10. Качалка 2 крепится на валу преобразователя 1 посредством цангового зажима, выполненного в виде паза 15, шпильки 17, установленной в отверстии 16 и контргаек 18. Кроме того шпилька 17 и контргайки 18 служат для балансировки управляющего устройства, причем изменением массы или установкой дополнительных контргаек 18 осуществляется грубая балансировка, а перемещением шпильки 17 относительно отверстия 16 - точная балансировка, при этом отверстие 16 в одной из стенок паза может быть резьбовым. Совмещение балансировочного устройства с цанговым зажимом позволяет снизить массу управляющего устройства, что уменьшает нагрузку на вал электромеханического преобразователя 1 при воздействии вибрации и перегрузок.
Способ сборки РМ осуществляется следующим образом: перед установкой управляющего устройства производят его балансировку относительно плоскости симметрии качалки, проходящей через ось вращения качалки параллельно осям плунжеров. Балансировку осуществляют путем изменения массы контргаек 18 и перемещения шпильки 17 в отверстии качалки 2 относительно ее плоскости симметрии. После чего заполняют корпус РМ рабочей жидкостью, приводят во вращение трехшестеренный насос 8, подают на электромеханический преобразователь 1 управляющий сигнал, замеряют скорость и при необходимости регулируют ее перемещением плунжеров 4 относительно качалки посредством крепежных элементов 6. Балансировать управляющее устройство можно было бы после регулировки скорости, однако это может привести к попаданию посторонних частиц, возникающих при доработке контргаек 18 и балансировке, в рабочую жидкость, что недопустимо для РМ. Положение плунжеров при этом несущественно, т.к. балансировка производится относительно плоскости, параллельной осям плунжеров и находящейся на одинаковом расстоянии от их осей. Балансировка управляющего устройства осуществляется на балансировочном стенде под действием перегрузки, действующей на РМ в направлении осей плунжеров, т.к. перемещение именно в этом направлении влияет на скоростную характеристику, причем точность регулировки прямо пропорциональна перегрузке, создаваемой балансировочным стендом.
Устранение дебаланса управляющего устройства путем балансировки относительно оси симметрии качалки позволяет повысить виброустойчивость и стабилизировать скоростную характеристику РМ при воздействии вибраций и перегрузок.
Литература:
1. Н. С. Гамынин. Гидравлический привод систем управления. - М.: Машиностроение, 1972 г., с. 27-28, рис. 1.4а.
2. Патент RU N 2075032, кл. F 42 B 10/00, 1994 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131377C1 |
| РУЛЕВАЯ МАШИНА | 1998 |
|
RU2131827C1 |
| СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 2001 |
|
RU2187779C1 |
| РУЛЕВАЯ МАШИНА | 1996 |
|
RU2094312C1 |
| РУЛЕВАЯ МАШИНА | 2006 |
|
RU2346229C2 |
| СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ | 2001 |
|
RU2194239C2 |
| РУЛЕВАЯ МАШИНА | 2007 |
|
RU2351883C2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ И СПОСОБ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ | 2004 |
|
RU2292022C2 |
| РУЛЕВАЯ МАШИНА | 2003 |
|
RU2240260C2 |
| СПОСОБ БАЛАНСИРОВКИ БЛОКА УПРАВЛЕНИЯ РУЛЕВОЙ МАШИНЫ | 2010 |
|
RU2428651C1 |
Изобретение относится к ракетно-космической технике. Рулевая машина содержит корпус, силовой механизм с выходным валом. В корпусе размещены трехшестеренный насос с полыми валами ведомых шестерен и управляющее устройство в виде электромеханического преобразователя и жестко связанную с его валом качалку, на которой закреплены плунжеры. При этом плунжеры размещены в полых валах ведомых шестерен насоса, а качалка снабжена балансировочным устройством, размещенным симметрично плоскости, проходящей через ось вращения качалки и ось ведущей шестерни насоса. Способ сборки рулевой машины включает заполнение корпуса рабочей жидкостью, приведение во вращение трехшестеренного насоса, подачу управляющего сигнала на электромеханический преобразователь, замер скорости выходного вала силового механизма и ее регулирование перемещением плунжеров относительно качалки. Перед заполнением корпуса жидкостью управляющее устройство балансируют относительно плоскости симметрии качалки. Затем узел управления устанавливают в корпус, обеспечивая совмещение плоскости симметрии качалки с плоскостью, проходящей через ось вращения качалки и ось ведущей шестерни насоса при отсутствии управляющего сигнала на электромеханическом преобразователе. Изобретение позволяет повысить виброустойчивость и стабилизацию скорости рулевой машины при перегрузках. 2 с. и 3 з.п.ф-лы, 2 ил.
| RU 2075032 C1, 10.03.97 | |||
| РУЛЕВАЯ МАШИНА | 1996 |
|
RU2094312C1 |
| Гамынин Н.С | |||
| Гидравлический привод систем управления | |||
| - М.: Машиностроение, 1972, с.27,28, рис.1.4а | |||
| US 5393011, 28.02.95 | |||
| US 5423497, 13.06.95 | |||
| КОРМОВАЯ ДОБАВКА ПРОБИОТИЧЕСКАЯ | 2024 |
|
RU2833079C1 |

