Изобретение относится к области электротехники и может быть применено в электроприводах переменного тока.
Известен способ управления асинхронным электродвигателем путем изменения числа полюсов (Пиотровский Л. М. Электрические машины. М. Госэнергоиздат. 1950, с. 455). Однако попытки реализации двигателей с числом ступеней скорости больше четырех не увенчались успехом из-за конструктивной сложности как самого двигателя, так и переключающего устройства (преобразователя).
Известен способ управления асинхронным электродвигателем путем регулирования действующего значения несинусоидального напряжения питания (Пиотровский Л. М. Электрические машины. М. Госэнергоиздат, 1950, с. 465, 467). Этот способ весьма неэффективен, поскольку при снижении напряжения до уровня 0,7 от номинального значения и моменте нагрузки, равном номинальному значению, скорость регулируется в пределах (5.8)%
Известен способ управления асинхронными двигателями, являющийся прототипом и заключающийся в том, что одновременно изменяют частоту и действующее значение напряжения преобразователя (Булгаков А.А. Частотное управление асинхронными двигателями. М. Эноргоиздат, 1982, 216 с.). Частотный способ управления основан на законе М.П. Костенко, установившем, что относительное действующее значение напряжения необходимо изменять пропорционально произведению частоты на корень квадратный из относительного момента двигателя. В дальнейшем А.А. Булгаковым были установлены закономерности различных соотношений между частотой и действующим значением напряжения:
напряжение изменялось пропорционально частоте;
напряжение изменялось так, чтобы обеспечить постоянство полного или рабочего потока при изменении частоты;
управление частотой при номинальном напряжении и т.д.
Классификация вариантов практической реализации установленных законов управления предопределила разграничение систем на частотные и частотно-токовые. Однако, это разграничение условное, поскольку ток всегда определяется напряжением. Управление двигателем осуществляется преобразователем частоты, являющемся дискретным устройством. устройством. Дискретный характер работы преобразователя частоты проявляется в несинусоидальности напряжения, причем частоты высших гармоник пропорциональны основной частоте (Эпштейн И.И. Автоматизированный электропривод переменного тока. М. Энергоиздат, 1982, с. 172).
Недостатки прототипа:
при несинусоидальном напряжении, обусловленном применением полупроводниковых преобразователей частоты, амплитудно-частотные спектры тока преобразователя и кривой пространственного распределения индукции на полюсном делении двигателя значительно отличаются друг от друга. Следствием этого является возникновение высших гармонических составляющих во вращающем моменте двигателя и создание паразитных (тормозных) моментов, снижающих к.п.д. комплекса "преобразователь-двигатель" и повышающих вибрации и шумы;
появление высших гармонических составляющих в моменте двигателя при глубоком частотном регулировании приводит к неравномерному вращению двигателя.
Задачей изобретения является создание способа управления, обеспечивающего повышение к.п.д. снижение вибраций и шумов при несинусоидальном напряжении питания.
Поставленная задача решается следующим образом:
Одновременно изменяют частоту и действующее значение напряжения согласно требуемому закону, причем при заданных частоте и уровне действующего напряжения преобразователя регулируют мгновенное значение напряжения преобразователя так, чтобы форма кривой тока преобразователя стала подобной форме пространственной кривой индукции на полюсной делении двигателя.
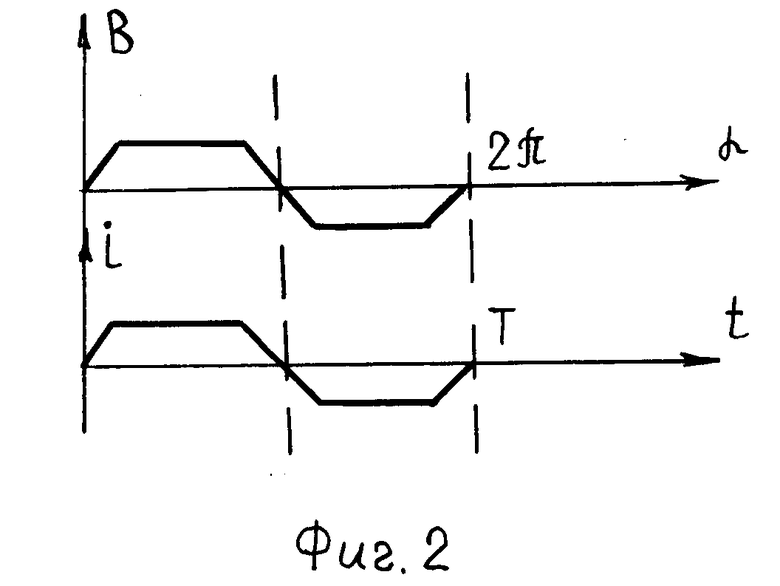
На фиг. 1 изображено одно из возможных устройств, реализующих предлагаемый способ, на фиг. 2 графики подобных форм индукции на полюсном делении двигателя и тока преобразователя.
Функциональная схема (фиг. 1), реализующая предлагаемый способ, состоит из следующих узлов: 1 полупроводниковый преобразователь частоты ППЧ, 2 - вычислитель подобия ВП, 3 блок эталонного периодического распределения индукции БЭ, 4 асинхронный электродвигатель АД. Причем датчик выходного тока полупроводникового преобразователя частоты 1 соединен с первым входом вычислителя подобия 2, второй вход которого соединен с выходом блока эталонного периодического распределения индукции 3, а вход последнего соединен с задатчиком частоты полупроводникового преобразователя частоты 1. При этом выход вычислителя подобия 2 соединен с устройством управления коммутацией полупроводникового преобразователя частоты 1, силовая цепь которого соединена с асинхронным двигателем 4.
Полупроводниковый преобразователь частоты 1 (ППЧ) является выпускаемым серийно преобразователем серии ТПЧ с автономным инвертором напряжения, снабженным датчиком выходного тока. Преобразователи имеют замкнутую систему регулирования напряжения и частоты, обеспечивающую заданный закон изменения действующего значения напряжения от частоты, задатчик частоты и устройство управления коммутацией преобразователя. (Булгаков А.А. Частотное управление асинхронными двигателями. М. Энергоиздат, 1982, с. 195).
Вычислитель подобия 2 (ВП) может быть выполнен на базе двух входных дифференцирующих и одного суммирующего операционных усилителей ("Расчет исполнительных корректирующих и преобразовательных элементов автоматических систем". Киев, "Техника", 1971).
Блок эталонного периодического распределения индукции 3 (БЭ) может иметь различные исполнения, сложность которых определяется формой кривой индукции на полюсном делении асинхронного двигателя 4 (АД). В случае, приведенном на фиг. 2, блок реализуется одной микросхемой (ТТЛ), например, серии К155, с индуктивностью, включенной на входе микросхемы. При других формах кривой индукции на полюсном делении асинхронного двигателя 4 (АД) возможно потребуется применение программируемого микропроцессора.
Способ осуществляется следующим образом.
Производится включение преобразователя 1 на заданную частоту 1. При этом устанавливается требуемый уровень действующего значения напряжения преобразователя Uп, согласно заложенного в преобразователь закона изменения напряжения от частоты. Напряжение Uп заданной частоты f от преобразователя 1 поступает на асинхронный двигатель 4, возникает электрический ток, создающий вращающееся магнитное поле, под действием которого на валу двигателя 4 устанавливается скорость, соответствующая напряжению Uп и частоте f. Одновременно с подачей напряжения на двигатель 4 заданная частота f поступает на вход блока эталонного периодического распределения индукции 3, в котором заранее реализована форма пространственной кривой индукции в полном соответствии с реальной кривой пространственного распределения индукции на полюсном делении асинхронного двигателя 4. Выходной сигнал UB(α) с эталонного блока 3 поступает на второй вход вычислителя подобия 2. На первый вход вычислителя подобия 2 поступает сигнал Ui(t), пропорциональный току преобразователя 1, причем сигналы UB(α) и Ui(t) имеют одинаковый период и поступают на вычислитель подобия 2 синхронно. В вычислителе подобия 2 сигналы UB(α) и Ui(t) дифференцируются, а затем суммируются. Если сигналы UB(α) и Ui(t) не подобны по форме, то вычислитель подобия 2 выдает сигнал обратной связи ΔU на устройство управления коммутацией полупроводникового преобразователя частоты 1. Сигнал ΔU обеспечивает увеличение частоты коммутационных процессов преобразователя 1, регулируя мгновенное значение напряжения преобразователя 1, а следовательно, и форму кривой тока (Теоретические вопросы "добавочной" коммутации, см. Эпштейн И.И. Автоматизированный электропривод переменного тока. М. Энергоиздат, 1982, 6.5). При достижении условий подобия форм пространственной кривой индукции B на полюсном делении двигателя 4 и кривой тока преобразователя 1 на заданной частоте f (периоде T), как это, например, показано на фиг. 2, сигнал вычислителя подобия 2 ΔU 0. Частота коммутационных процессов преобразователя 1 снижается до начального уровня, а действующее значение напряжения корректируется в соответствии с законом изменения напряжения от рабочей частоты f.
При изменении частоты f (изменении скорости двигателя) вышеописанный процесс достижения подобия указанных форм повторяется.
Таким образом, функциональная схема по фиг. 1 позволяет реализовать выполнение предлагаемого способа, т.е. при заданных частоте и уровне действующего значения напряжения преобразователя регулировать мгновенное значение напряжения преобразователя так, чтобы форма кривой тока преобразователя стала подобной форме пространственной кривой индукции на полюсном делении двигателя.
Основополагающим условием предлагаемого способа является обеспечение подобия временной кривой тока и пространственной кривой индукции. Действительно, закон изменения индукции одной фазы статора в общем случае выражается в виде:
B = Bmf1(t)f2(α).
Здесь f1(t) временная периодическая функция, вид которой определяется законом переменного тока в фазе,
f2(α) пространственная периодическая функция распределения магнитной индукции в воздушном зазоре вдоль
окружности статора, аргументом которой является угол α, отсчитываемый в неподвижной системе координат.
Функция B B(t, a) для возможности получения вращающего поля в многофазной системе должна представлять собой стоячую волну, раскрадываемую на две вращающихся в противоположные стороны со скоростями "а", т.е. удовлетворять однородному одномерному волновому уравнению:
Проинтегрировав (1) один раз по времени, а другой по углу, получаем
Функции f1(t) и f2(α) для удовлетворения условий (2) и (3) должны обладать следующими свойствами:
Свойствами (4) и (5) могут обладать только подобные функции f1(t) и f2(t), которые представляются в виде гармонических рядов. Решением уравнения (1) являются произведения гармонических рядов временных и пространственных процессов с идентичными частотными спектрами. Это объясняется тем, что в силу ортогональности собственных функций для других частот, не равных собственным, однородное уравнение (1) не имеет других решений, кроме тривиального (нулевого). При этом в создании вращающего поля при идентичных временных и пространственных амплитудно-частотных спектрах принимают участие все гармоники, суммируясь арифметически. Следователь, выполняя условия подобия временной кривой тока и пространственной кривой индукции, достигают создание вращающегося момента всеми гармоническими составляющими без возникновения существенных паразитных моментов. Последнее обеспечивает повышение к.п.д. снижение вибраций и шумов при несинусоидальном напряжении питания.
Для практического выполнения условий подобия временной кривой тока и пространственной кривой индукции в связи с равенством временного периода тока и пространственной кривой индукции достаточно обеспечить постоянство отношения производных указанных функций на их периоде. Экспериментальное подтверждение эффективности выполнения условия подобия проводилось на двухфазном асинхронном двигателе с явно выраженными полюсами. Пространственное распределение индукции на полюсном делении имело вид равнобедренной трапеции. Питание обмоток двигателя в первом случае производилось синусоидальным током, а во втором - трапецеидальным, при одном и том же значении действующего напряжения. Во втором случае (обеспечение подобия временных и пространственных процессов) фиксировалось повышение к. п.д. на 14% Питание обмоток двигателя в третьем случае осуществлялось от тиристорного преобразователя с управляемой двухсторонней проводимостью при угле управления 90o (значительное искажение синусоиды). По сравнению со вторым случаем питания наблюдалось снижение к.п.д. на 27% с появлением значительных вибраций и шумов.
Следует отметить, что предлагаемый способ относится к вопросу совместимости преобразователя и двигателя в асинхронном приводе. Поэтому его реализация возможна не только корректировкой тока при заданном пространственном распределении индукции, но и формированием пространственного распределения индукции индукции известными устройствами, применяемыми в электромашиностроении, с одновременной корректировкой тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1996 |
|
RU2094940C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2246172C1 |
| ЭЛЕКТРОМОЛОТ | 2005 |
|
RU2315181C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| РЕГУЛЯТОР ТРЕХФАЗНОГО НАПРЯЖЕНИЯ | 1997 |
|
RU2122274C1 |
Использование: может быть использовано в электроприводах переменного тока различного назначения. Сущность: в способе управления асинхронным электродвигателем при несинусоидальном напряжении питания путем изменения действующего значения напряжения преобразователя 1 в зависимости от частоты по выбранному закону, для заданной частоты и уровня действующего напряжения преобразователя 1 регулируют мгновенное значение преобразователя 1 так, чтобы форма кривой тока преобразователя 1 стала подобной форме пространственной кривой индукции на полюсном делении двигателя 4. Подобие определяется вычислителем 2. В результате обеспечивается повышение к.п.д., снижение вибрации и шумов. 2 ил.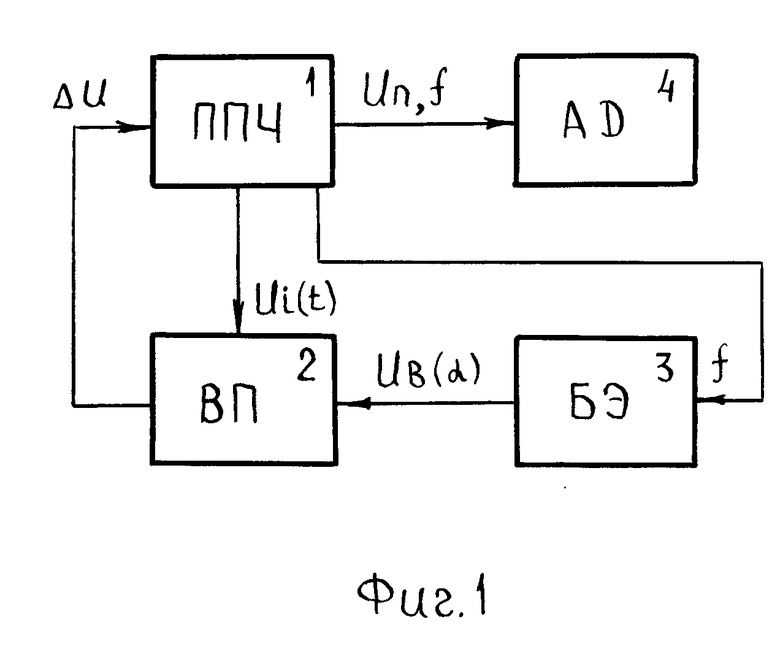
Способ управления асинхронным электродвигателем при несинусоидальном напряжении питания путем одновременного изменения частоты и действующего значения напряжения преобразователя, отличающийся тем, что при заданных частоте и уровне действующего напряжения преобразователя регулируют мгновенное значение напряжения преобразователя так, чтобы форма кривой тока преобразователя стала подобной форме пространственной кривой индукции на полюсном делении двигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пиотровский Л.М | |||
| Электрические машины | |||
| - М.: Госэнергоиздат, 1950, с.455 - 467 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Булгаков А.А | |||
| Частотное управление асинхронными двигателями | |||
| - М.: Энергоиздат, 1982, с.216. | |||
