Предлагаемое изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе машины двойного питания при питании роторных обмоток от статического преобразователя частоты, и может быть использовано в механизмах, требующих высоких динамических свойств, например в стендах для натурного моделирования динамических нагрузок.
Известна система [1, с. 153] содержащая трехфазную машину двойного питания, фазы статора которой последовательно через датчик тока и датчики напряжения подключены к сети, фазы ротора присоединены к выходам источника регулируемого тока, входы которого последовательно через преобразователь координат подключены к выходам регуляторов активного и реактивного токов ротора, управляющие входы преобразователя координат последовательно через блок формирования гармонических сигналов подключены к выходам датчика положения ротора и датчиков Холла, установленных на валу и в воздушном зазоре машины двойного питания соответственно.
Недостатком указанной системы является неточное регулирование электромагнитного момента. Это обусловлено наличием высокочастотной и низкочастотной помех в выходных сигналах датчиков Холла [2, с. 16] что приводит к неточному определению ориентирующего вектора системы блоком формирования гармонических сигналов.
Кроме того, известна система управления машиной двойного питания [3, с. 102] Указанное устройство является прототипом предлагаемого изобретения и содержит трехфазную машину двойного питания, фазы статора которой последовательно через датчики тока статора подключены к сети, фазы ротора последовательно через датчики тока ротора подключены к выходам преобразователя частоты, управляющие входы которого последовательно через преобразователь фаз подключены к выходам фазирующего устройства, первые управляющие входы которого последовательно через первый и второй сумматоры подключены к выходам регуляторов системы и к выходам первого и второго корректирующих устройств, вторые управляющие входы фазирующего устройства последовательно через тригонометрический анализатор соединены с выходами третьего и четвертого сумматоров, первые входы которых последовательно через преобразователь координат подключены к выходам датчика положения ротора и датчиков тока статора машины двойного питания.
Однако указанная система характеризуется неточным регулированием электромагнитного момента машины двойного питания. Это объясняется нелинейностью каналов управления электромагнитным моментом, вызванной неточным определением ориентирующего вектора системы, что обусловлено зависимостью главной индуктивности от степени насыщения магнитной цепи машины двойного питания [1] Изменение величины главной индуктивности происходит при изменении модуля вектора тока намагничивания.
Анализ приведенного уровня техники свидетельствует о том, что задачей изобретения является создание системы управления машиной двойного питания, осуществляющей более точное регулирование электромагнитного момента машины двойного питания за счет линейности каналов управления электромагнитным моментом.
Это достигается тем, что система управления машиной двойного питания, содержащая трехфазную машину двойного питания, фазы статора которой подключены к сети, фазы ротора последовательно через датчик тока ротора соединены с выходами трехфазного преобразователя частоты, аналоговые входы которого соединены с сетью, на валу машины двойного питания установлены тахогенератор и вращающийся трансформатор, выходы которого соединены последовательно через демодулятор с управляющими входами первого и третьего преобразователей координат, аналоговые входы которых присоединены параллельно через датчик тока статора и датчик напряжения соответственно к фазам статора машины двойного питания, выходы первого и третьего преобразователей координат подключены к первым входам второго и четвертого преобразователей координат соответственно, вторые входы которых последовательно через тригонометрический анализатор присоединены к аналоговым входам фазирующего устройства, выходы которого последовательно через преобразователь фаз подключены к управляющим входам преобразователя частоты, датчик тока ротора последовательно через первый и второй сумматоры подключен к управляющим входам блока коррекции ориентирующего вектора, аналоговые входы которого соединены с выходами первого и второго сумматоров соответственно, причем выходы блока коррекции ориентирующего вектора подключены к входам тригонометрического анализатора, первый и второй сумматоры своими первыми входами присоединены к выходам первого преобразователя координат, аналоговый выход тригонометрического анализатора соединен с третьим входом второго корректирующего устройства и с инвертирующим входом третьего сумматора, неинвертирующий вход которого является первым управляющим входом системы, выход третьего сумматора последовательно через регулятор потокосцепления подключен к первому входу четвертого сумматора, второй вход которого подключен к выходу первого корректирующего устройства, выход четвертого сумматора соединен с первым управляющим входом фазирующего устройства, второй управляющий вход которого последовательно через пятый сумматор подключен к выходу регулятора тока, вход которого соединен с выходом шестого сумматора, неинвертирующий вход которого является вторым управляющим входом системы, инвертирующий вход шестого сумматора соединен с первым выходом второго преобразователя координат и вторым входом первого корректирующего устройства, первый вход которого соединен с первым выходом четвертого преобразователя координат, вторые выходы четвертого и второго преобразователей координат подключены к первому и второму входам второго корректирующего устройства соответственно, тахогенератор последовательно через второе корректирующее устройство подключен к третьему входу первого корректирующего устройства, выход второго корректирующего устройства соединен со вторым входом пятого сумматора.
Блок коррекции ориентирующего вектора выполнен в виде последовательно соединенных вычислителя модуля, аналого-цифрового преобразователя, запоминающего устройства, цифроаналогового преобразователя, выход которого подключен к одним входам первого и второго умножителей, выходы которых подключены к соответствующим сумматорам, которые подключены соответственно к первому и второму усилителям.
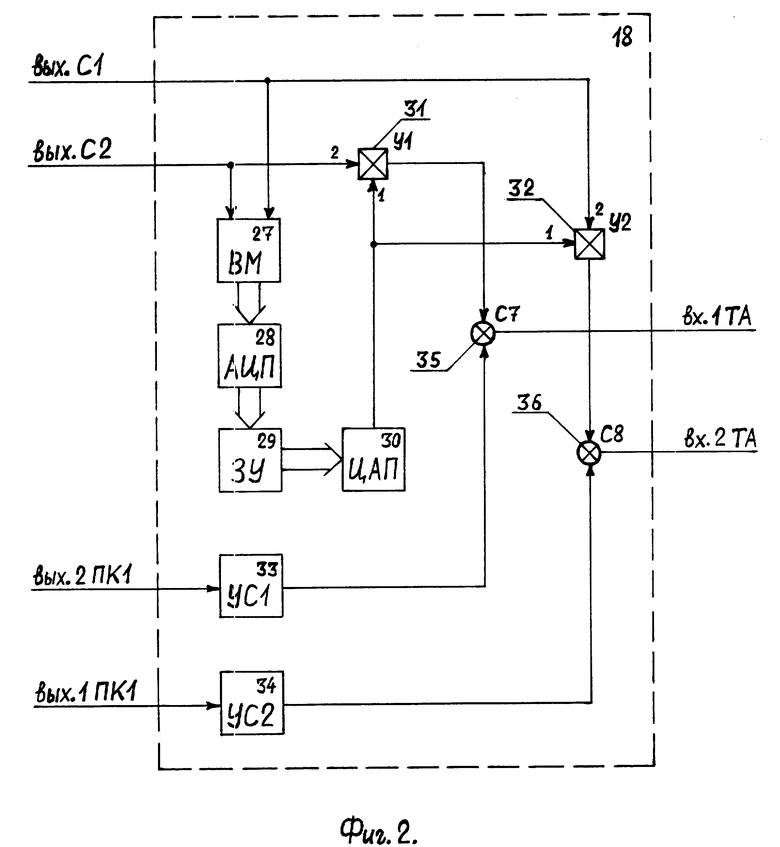
На фиг. 1 приведена функциональная схема системы управления машиной двойного питания; на фиг. 2 схема блока коррекции ориентирующего вектора; на фиг. 3 схема для экспериментального определения главной индуктивности машины двойного питания.
Предлагаемое устройство (фиг. 1) содержит машину двойного питания (МДП) 1, подключенную последовательно через датчик тока ротора (ДТР) 2 к выходам преобразователя частоты (ПЧ) 3, установленные на валу тахогенератор (ТГ) 4 и вращающийся трансформатор (ВТ) 5, выходы которого последовательно через демодулятор (ДМ) 6 подключены к управляющим входам первого и третьего преобразователей координат, (ПК1) 7 и (ПК3) 8, датчик тока статора (ДТС) 9, датчик напряжения (ДН) 10 статора, второй и четвертый преобразователи координат, (ПК2) 11 и (ПК4) 12, подключенные последовательно через тригонометрический анализатор (ТА) 13 к аналоговым входам фазирующего устройства (ФУ) 14, выходы которого соединены со входами преобразователя фаз (ПФ) 15, первый и второй сумматоры, (С1) 16 и (С2) 17, подключенные своими выходами к управляющим входам блока коррекции ориентирующего вектора (БКОВ) 18, второе корректирующее устройство (КУ2) 19, третий сумматор (С3) 20, подключенный последовательно через регулятор потока (РП) 21 к первому входу четвертого сумматора (С4) 22, второй вход которого соединен с выходом первого корректирующего устройства (КУ1) 23, пятый сумматор (С5) 24, подключенный последовательно через регулятор тока (РТ) 25 к выходу шестого сумматора (С6) 26, причем фазы статора машины двойного питания 1 последовательно через датчик тока статора 9 подключены к сети и к датчику напряжения 10, выходы которого последовательно через преобразователь координат 8 подключены к аналоговым входам преобразователя координат 12, первый и второй выходы которого подключены к первым входам корректирующих устройств 23 и 19 соответственно, датчик тока статора 9 последовательно через преобразователь координат 7 подключен к аналоговым входам преобразователя координат 11 и блока коррекции ориентирующего вектора 18, выходы которого соединены с входами тригонометрического анализатора 13, выходы датчика тока ротора 2 последовательно через сумматоры 16 и 17 подключены к первому и второму выходам преобразователя координат 7 соотвественно, вызоды преобразователя фаз 15 подключены к управляющим входам преобразователя частоты 3, аналоговые входы которого подключены к сети, тахогенератор 4 последовательно через корректирующее устройство 19 подключен к третьему входу корректирующего устройства 23, выход корректирующего устройства 19 последовательно через сумматор 24 подключен к второму управляющему входу фазирующего устройства 14, первый управляющий вход которого подключен к выходу сумматора 22, система управления подключена своим первым управляющим входом последовательно через сумматор 20 к аналоговому выходу тригонометрического анализатора 13 и к третьему входу корректирующего устройства 19, второй вход которого подключен к второму выходу преобразователя координат 11, первый выход которого подключен к второму входу корректирующего устройства 23 и последовательно через сумматор 26 к второму управляющему входу системы.
В качестве машины двойного питания 1 может быть использован асинхронный двигатель с фазным ротором, например, типа МТВ [4, с. 465]
В качестве датчика тока ротора 2 может быть использована ячейка датчика тока ДТ-3АИ [1, с. 165]
Преобразователь частоты 3 предназначен для питания цепей ротора машины двойного питания 1 переменным током. Преобразователь частоты 3 может быть выполнен на тиристорах типа ТБ243-400-16 [5]
В качестве тахогенератора 4 может быть использован тахогенератор постоянного тока (например, типа ТГ1).
Вращающийся трансформатор 5 и демодулятор 6 предназначены для формирования сигналов положения ротора на управляющие входы преобразователей координат 7 и 8. В качестве вращающегося трансформатора 5 и демодулятора 6 могут быть приняты соответствующие узлы комплектного электропривода "Размер 2М-5-21" [6]
Преобразователи координат 7 и 8 предназначены для формирования гармоничных сигналов на первые входы преобразователей координат 11 и 12 соответственно. Преобразователи координат 7 и 8 могут быть выполнены (каждый) на двух микросхемах типа К573РФ2 [7, с. 318] и четырех микросхемах типа КР572ПА1 [7, с. 427]
В качестве датчика тока статора 9 может быть принята ячейка датчика тока ДТ-ЗАИ [1, с. 165]
В качестве датчика напряжения статора 10 может быть принята ячейка датчика напряжения ДН-2АИ [1, с. 165]
Преобразователь координат 12 предназначен для формирования сигналов на первые входы корректирующих устройств 19 и 23. Преобразователь координат 11 предназначен для формирования сигналов на инвертирующий вход сумматора 26 и на вторые входы корректирующих устройств 19 и 23. Преобразователи координат 11 и 12 могут быть выполнены (каждый) на четырех микросхемах типа КМ525ПС3 [7, с. 374]
Тригонометрический анализатор 13 предназначен для формирования сигналов на вторые входы преобразователей координат 11 и 12, аналоговые входы фазирующего устройства 14, третий вход корректирующего устройства 19 и инвертирующий вход сумматора 20. Тригонометрический анализатор 13 может быть выполнен на пяти микросхемах типа КМ525ПС3 [7, с. 374]
Фазирующее устройство 14 предназначено для формирования сигналов на входы преобразователя фаз 15. Фазирующее устройство 14 может быть выполнено на четырех микросхемах типа КМ525ПС3 [1, с. 374]
Преобразователь фаз 15 предназначен для формирования сигналов на управляющие входы трехфазного преобразователя частоты 3. Преобразователь фаз 15 может быть выполнен на обыкновенных операционных усилителях и резисторах.
Блок коррекции ориентирующего вектора 18 предназначен для формирования сигналов на входы тригонометрического анализатора 13. Блок коррекции ориентирующего вектора 18 (фиг. 2) содержит: вычислитель модуля 27, выход которого последовательно через аналого-цифровой преобразователь 28 подключен к входу запоминающего устройства 29, выход которого последовательно через цифроаналоговый преобразователь 30 подключен к первым входам умножителей 31 и 32, усилители аналоговых сигналов 33 и 34, выходы которых соединены с первыми входами сумматоров 35 и 36 соответственно, причем входы усилителей 33, 34 подключены к выходам преобразователя координат 7, входы умножителей 31 и 32 соединены с выходами сумматоров 16 и 17 соответственно и с входами вычислителя модуля 27, выходы умножителей 31, 32 последовательно через сумматоры 35, 36 соответственно подключены к входам тригонометрического анализатора 13.
Вычислитель модуля 27 предназначен для преобразования выходных аналоговых сигналов сумматоров 16 и 17 во входной сигнал аналого-цифрового преобразователя 28. Вычислитель модуля 27 может быть выполнен на трех микросхемах типа КМ525ПС3 [3, с. 374]
Аналого-цифровой преобразователь 28 предназначен для преобразования входного аналогового сигнала в цифровой код на входы запоминающего устройства 29. В качестве аналого-цифрового преобразователя 28 быть использована, например, микросхема КР572ПВ1 [7, с. 434]
Запоминающее устройство 29 предназначено для преобразования цифрового кода на своем входе в цифровой код на входе цифроаналогового преобразователя 30. В качестве запоминающего устройства 29 может быть использовано цифровое постоянное запоминающее устройство, например микросхема К573РФ2 [7, с. 318]
Цифроаналоговый преобразователь 30 предназначен для преобразования цифрового кода с выхода запоминающего устройства 29 в аналоговый сигнал на первых входах умножителей 31 и 32. Цифроаналоговый преобразователь 30 может быть выполнен в виде двуквадрантного цифроаналогового умножителя, например микросхемы КР572ПА1 [7, с. 427]
В качестве умножителей 31 и 32 аналоговых сигналов могут быть использованы микросхемы КМ525ПС3 [7, с.374]
Все блоки суммирования и усилителя 33 и 34 могут быть выполнены на базе обыкновенных операционных усилителей и резисторов.
Устройство для управления машиной двойного питания работает следующим образом. Гармонические сигналы с выхода датчика тока статора 9, имеющие частоту токов статора ωs с помощью седьмого преобразователя координат 7 преобразуются в гармонические сигналы, имеющие частоту Δω равную
Dw = ωs-ωr,
где
ωr частота вращения ротора.
Мгновенное значение ωr поступает в виде опорных гармонических сигналов на управляющие входы преобразователей координат 7 и 8 с выходов демодулятора 6, который осуществляет обработку входных сигналов вращающегося трансформатора 5, жестко закрепленного на валу машины двойного питания 1.
Преобразованные гармонические сигналы isα, isβ с выходов преобразователя координат 7, соответствующие токам статора, суммируются в сумматорах 16 и 17 соответственно с сигналами токов ротора irα, irβ поступающими с выходов датчика тока ротора 2,
где
imα, imβ сигналы, соответствующие проекциям вектора тока намагничивания на оси неподвижной декартовой системы координат α, β
Вычислитель модуля 27 в блоке коррекции ориентирующего вектора 18 (фиг. 2) осуществляет нелинейное преобразование сигналов imα, imβ
где
Im сигнал, соответствующий модулю вектора тока намагничивания.
Цифроаналоговое устройство с памятью, состоящее из соединенных последовательно аналого-цифрового преобразователя 28, запоминающего устройства 29 и цифроаналогового преобразователя 30 формирует на первых входах умножителей 31, 32 аналоговый сигнал, пропорциональный величине главной индуктивности Lm, в соответствии с введенной в ячейки памяти запоминающего устройства 29 зависимостью Lm(Im). Зависимость Lm(Im) является нелинейной и представляет собой кривую намагничивания машины двойного питания 1. Цифровой код с выхода аналого-цифрового преобразователя 28, соответствующий величине Im, поступает на вход запоминающего устройства 29 и указывает адрес ячейки памяти, в которой хранится цифровой код, соответствующий значению Lm, являющийся выходным цифровым кодом запоминающего устройства кодом 29 [8, с. 19] и поступающий на вход цифроаналогового преобразователя 30.
Гармонические сигналы Ψsα, Ψsβ, соответствующие проекциям ориентирующего вектора системы, формируются сумматорами 35 и 36 соответственно суммированием усиленных в блоках 33, 34 сигналов isα, isβ с выходными сигналами умножителей 31, 32 соответственно
где
Lσ коэффициент усиления усилителей 33 и 34, определяющий влияние индуктивности рассеяния статора.
Тригонометрический анализатор 13 производит вычисление модуля ориентирующего вектора системы 
и опорных сигналов ориентации этого вектора
Гармонические сигналы Ψsα′, Ψsβ′ используются фазирующим устройством 14 для преобразования задающих сигналов Ur1, Ur2 в гармонические сигналы задания фазных напряжений ротора. Фазные напряжения ротора формируются на выходе преобразователя частоты 3 в соответствии с задающими сигналами в трехфазной системе координат, поступающими с выхода преобразователя фаз 15.
Управляющие сигналы Ur1, Ur2 формируются регуляторами потокосцепления 21 и тока 25 соответственно. Входными сигналами регуляторов 21, 25 являются сигналы рассогласования заданных значений потокосцепления (Uуп) на первом управляющем входе системы и моментообразующего тока статора (Uут) на втором управляющем входе системы с их измеренными значениями  и is2 соответственно. Входные сигналы регуляторов 21, 25 формируются сумматорами 20 и 26 соответственно.
и is2 соответственно. Входные сигналы регуляторов 21, 25 формируются сумматорами 20 и 26 соответственно.
Электромагнитный момент Ме машины двойного питания 1 пропорционален произведению сигналов на управляющих входах системы
M
где
km коэффициент пропорциональности, определяемый через параметры машины двойного питания 1.
Фактическое значение электромагнитного момента Me определяется произведением модуля ориентирующего вектора системы  и моментообразующего тока статора is2
и моментообразующего тока статора is2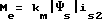
Вычисление значения  с учетом изменения параметра Lm позволяет системе управления машиной двойного питания 1 обеспечивать в установившихся режимах работы равенство модуля ориентирующего вектора его заданному значению Uуп, а следовательно, и линейную зависимость Me от задающего сигнала Uут.
с учетом изменения параметра Lm позволяет системе управления машиной двойного питания 1 обеспечивать в установившихся режимах работы равенство модуля ориентирующего вектора его заданному значению Uуп, а следовательно, и линейную зависимость Me от задающего сигнала Uут.
Кроме того, осуществляется точное преобразование задающих воздействий Ur1, Ur2 в гармонические сигналы задания напряжений ротора фазирующим устройством 14, т.к. для этого преобразования фазирующее устройство 14 использует уточненные значения опорных сигналов Ψsα′, Ψsβ′ с выхода тригонометрического анализатора 13. Таким образом, управляющие сигналы Ur1, Ur2 воздействуют только на модуль ориентирующего вектора  и моментообразующую составляющую тока статора is2 соответственно, за счет чего достигается линейность каналов регулирования
и моментообразующую составляющую тока статора is2 соответственно, за счет чего достигается линейность каналов регулирования  и is2 в установившихся и переходных режимах работы, и выполняется требуемая характеристика системы
и is2 в установившихся и переходных режимах работы, и выполняется требуемая характеристика системы
Me= M
Корректирующие устройства 19 и 23 предназначены для коррекции выходных сигналов регуляторов как в переходных, так и в установившихся режимах. Выходные сигналы корректирующих устройств 19 и 23 суммируются с выходными сигналами регуляторов в сумматорах 24 и 22 соответственно. На первые входы корректирующих устройств 19, 23 поступают сигналы, соответствующие проекциям вектора напряжения статора на оси системы координат ориентирующего вектора. Проекции вектора напряжения статора вычисляются из выходных гармонических сигналов датчика напряжения 10 путем их последовательного преобразования в преобразователях координат 8 и 12 в функции сигналов положения ротора и опорных сигналов ориентирующего вектора с управляющих выходов тригонометрического анализатора 13 соответственно.
На вторые входы корректирующих устройств 19 и 23 поступают сигналы с выхода преобразователя координат 11, который преобразует входные сигналы isα, isβ в функции опорных сигналов ориентирующего вектора.
На третий вход корректирующего устройства 19 поступает сигнал  а на четвертый сигнал частоты вращения ротора с выхода тахогенератора 4. Аналоговый сигнал с выхода корректирующего устройства 19 поступает на третий вход корректирующего устройства 23.
а на четвертый сигнал частоты вращения ротора с выхода тахогенератора 4. Аналоговый сигнал с выхода корректирующего устройства 19 поступает на третий вход корректирующего устройства 23.
Преобразователи координат 11, 12 формируют входные сигналы на первые и вторые входы корректирующих устройств 19, 23, используя уточненные опорные сигналы ориентирующего вектора системы. Это позволяет с большей точностью компенсировать влияние собственных инерционностей машины двойного питания 1 и формирование электромагнитного момента в переходных режимах, результатом чего является более точная линеаризация каналов управления электромагнитным моментом.
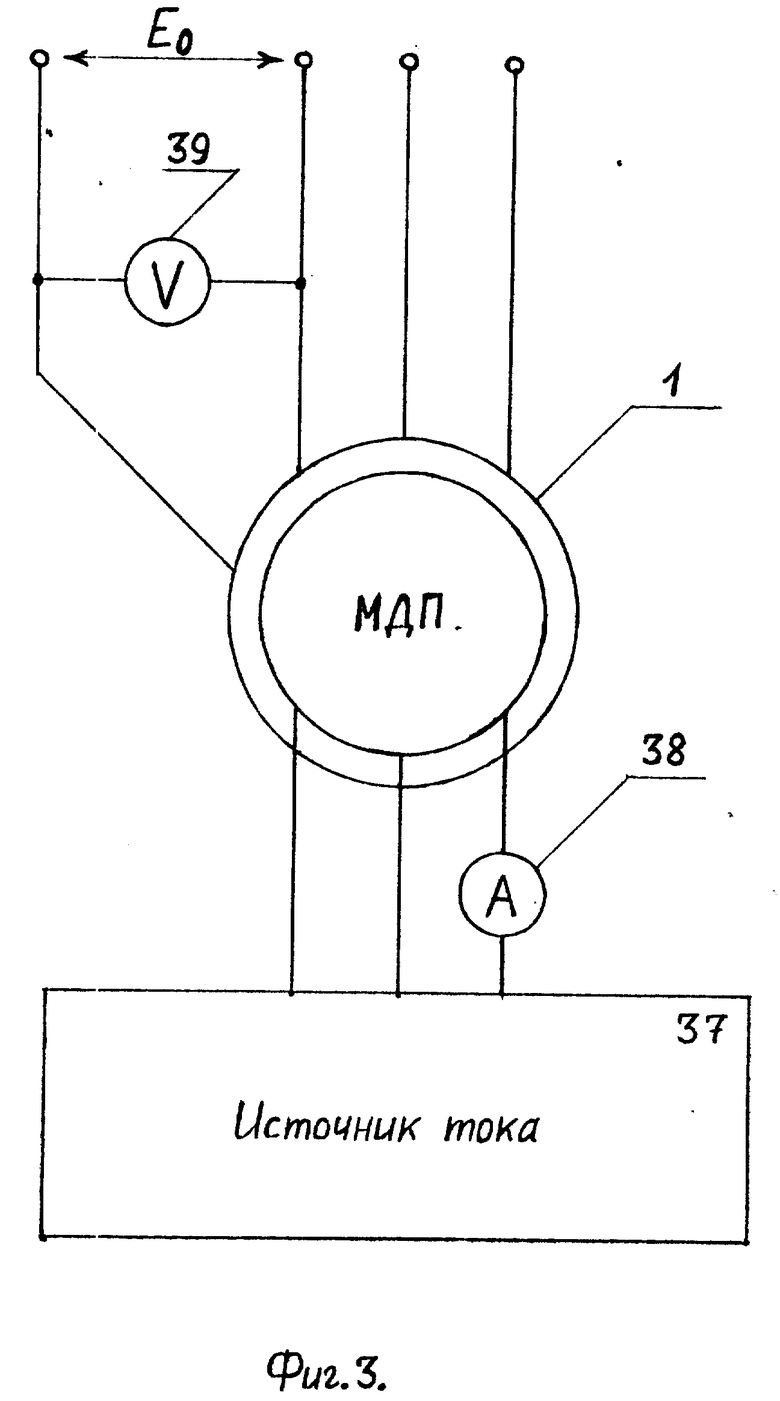
Кривая намагничивания Lm(Im) машины двойного питания 1 может быть определена экспериментально на основании выражения
где
Eо значение фазной ЭДС на выходах разомкнутой обмотки статора,
kтр коэффициент трансформации, равный отношению числа витков обмотки статора к числу витков обмотки ротора,
ωи частота источника синусоидального тока, подключенного к ротору,
Im действующее значение фазного тока ротора,
в ходе предварительных испытаний при включении машины двойного питания 1 по схеме фиг. 3.
Источник тока 37 (фиг. 3) формирует трехфазную симметричную систему токов. Значения тока Im определяются по показателям амперметра 38, значения фазной ЭДС Eо по показаниям вольтметра 39.
Таким образом, в предлагаемом решении точность регулирования электромагнитного момента выше по сравнению с прототипом. Повышение точности регулирования электромагнитного момента в системе управления машиной двойного питания осуществляется за счет линеаризации каналов управления электромагнитным моментом. Это достигается за счет учета изменения главной индуктивности машины двойного питания при определении ориентирующего вектора системы.
Источники информации
1. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями /О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов и др. М. Энергоатомиздат, 1983, 256 с.
2. Асинхронные электроприводы с векторным управлением. /В.В. Рудаков, И. М. Столяров, В.А. Дартау. Л. Энергоатомиздат, Ленингр. отд-ние, 1987, 136 с.
3. Дартау В. А. Рябов В.Н. Управление по принципу подчиненного регулирования электроприводом с асинхронной машиной двойного питания. В кн. Записки Ленинградского горного института им. Г. В. Плеханова, т. LXXXIV. Л. Изд-во ЛГИ, 1979, с. 100 106.
4. Вешеневский С.Н. Характеристики двигателей в электроприводе. М. Энергия, 1967, 472 с.
5. ГОСТ 20332-84. Тиристоры. Электрические параметры. М. Изд-во стандартов, 1975.
6. Электропривод асинхронный глубокорегулируемый комплектный "Размер 2М-5-21". Техническое описание ИДАФ. 655174. 002 ТО.
7. Цифровые и аналоговые интегральные микросхемы. Справочник. С.В. Якубовский, Л. И. Ниссельсон, В.И. Кулешова и др. Под ред. С.В. Якубовского. М. Радио и связь, 1990, 496 с.
8. Введение в микроЭВМ. С.А. Майоров, В.В. Кириллов, А.А. Приблуда. Л. Машиностроение, Ленингр. отд-ние, 1988, 304 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
Использование: может быть использовано для создания моделирующих стендов с высокими динамическими показателями. Сущность: в системе управления машиной двойного питания последняя подключена последовательно через датчик тока ротора 2 к выходам преобразователя частоты 3, она содержит установленные на валу тахогенератор 4 и вращающийся трансформатор 5, выходы которого последовательно через демодулятор 6 подключены к управляющим входам преобразователей координат 7 и 8, датчик тока статора 9, датчик напряжения 10 статора, преобразователи координат 11 и 12, подключенные последовательно через тригонометрический анализатор 13 к аналоговым входам фазирующего устройства 14, выходы которого соединены с входами преобразователя фаз 15, сумматоры 16 и 17, подключенные своими выходами к управляющим входам блока коррекции ориентирующего вектора 18, корректирующее устройство 19, сумматор 20, подключенный последовательно через регулятор потока 21 к первому входу сумматора 22, второй вход которого соединен с выходом корректирующего устройства 23, сумматор 24, подключенный последовательно через регулятор тока 25 к выходу сумматора 26. Система управления машиной двойного питания позволяет повысить точность регулирования электромагнитного момента за счет линейности каналов управления электромагнитным моментом. 3 ил.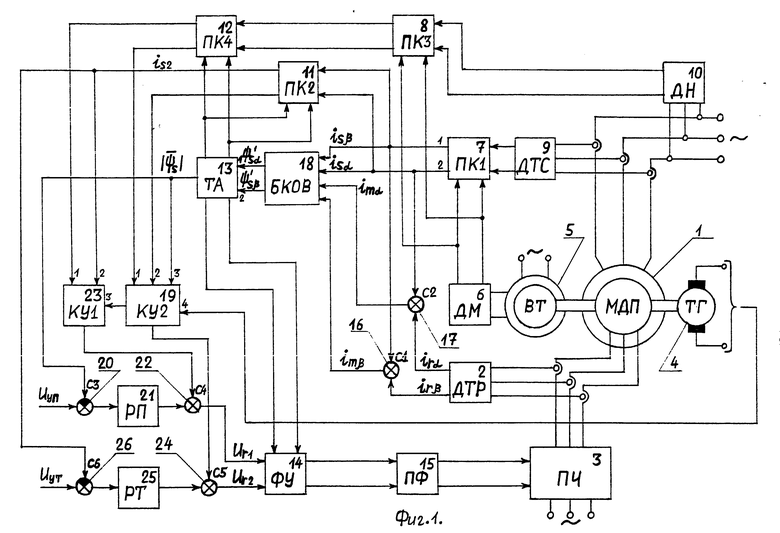
Система управления машиной двойного питания, содержащая трехфазную машину двойного питания, фазы статора которой подключены к сети, фазы ротора соединены с входами датчика тока ротора и выходами трехфазного преобразователя частоты, аналоговые входы которого соединены с сетью, на валу машины двойного питания установлены тахогенератор и вращающийся трансформатор, выходы которого соединены с входами демодулятора, выходы которого поключены к управляющим входам первого и третьего преобразователей координат, аналоговые входы которых соединены с выходами датчика тока статора и датчика напряжения соответственно, входы которых подключены к фазам статора машины двойного питания, выходы первого и третьего преобразователей координат подключены к одним входам второго и четвертого преобразователей координат соответственно, другие входы которых соединены с одними управляющими выходами тригонометрического анализатора, другие управляющие выходы которого подключены к аналоговым входам фазирующего устройства, выходы которого присоединены к входам преобразователя фаз, выходы которого подключены к управляющим входам преобразователя частоты, первый сумматор своим первым входом подключен к одному выходу первого преобразователя координат, другой выход которого соединен с одним входом второго сумматора, другие входы первого и второго сумматоров подключены к выходам датчика тока ротора, аналоговый выход тригонометрического анализатора соединен с третьим входом второго корректирующего устройства и инвертирующим входом третьего сумматора, неинвертирующий вход которого является первым управляющим входом системы, выход третьего сумматора подключен к входу регулятора потокосцепления, выход которого соединен с одним входом четвертого сумматора, другой вход которого подключен к выходу первого корректирующего устройства, выход четвертого сумматора соединен с одним управляющим входом фазирующего устройства, другой управляющий вход которого подключен к выходу пятого сумматора, один вход которого подключен к выходу регулятора тока, вход которого соединен с выходом шестого сумматора, неинвертирующий вход которого является вторым управляющим входом системы, инвертирующий вход шестого сумматора соединен с первым выходом второго преобразователя координат и вторым входом первого корректирующего устройства, первый вход которого соединен с первым выходом четвертого преобразователя координат, вторые выходы четвертого и второго преобразователей координат подключены к первому и второму входам второго корректирующего устройства соответственно, выход тахогенератора соединен с четвертым входом второго корректирующего устройства, один выход которого подключен к третьему входу первого корректирующего устройства, другой выход второго корректирующего устройства соединен с другим входом пятого сумматора, отличающаяся тем, что в нее дополнительно введен блок коррекции ориентирующего вектора, выполненный в виде вычислителя модуля, выход которого соединен с входом аналого-цифрового преобразователя, выход которого соединен с входом запоминающего устройства, выход которого подключен к входу цифроаналогового преобразователя, выход которого подключен к одним входам первого и второго умножителей, другие входы которых соединены с аналоговыми входами блока корекции ориентирующего вектора и входами вычислителя модуля, выходы первого и второго умножителей подключены к одним входам седьмого и восьмого сумматоров соответственно, другие входы которых подключены к выходам первого и второго усилителей соответственно, входы которых являются управляющими входами блока коррекции ориентирующего вектора, причем его выходами являются выходы седьмого и восьмого сумматоров, причем аналоговые входы блока коррекции ориентирующего вектора подключены к соответствующим выходам первого и второго сумматоров, управляющие входы блока коррекции ориентирующего вектора подключены к соответствующим выходам первого преобразователя координат, выходы блока коррекции ориентирующего вектора соединены с соответствующими входами тригонометрического анализатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Слежановский О.В., Дацковский Л.Х., Кузнецов И.С | |||
| и др | |||
| - И.: Энергоатомиздат, 1983, с.153 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дартау В.А., Рябов В.Н | |||
| Управление по принципу подчиненного регулирования электроприводом с асинхронной машиной двойного питания | |||
| Записки Ленинградского горного института им.Г.В.Плеханова, т | |||
| XXXIV, Л.: Изд-во ЛГИ, 1979, с.100-106. | |||
