Изобретение относится к авиационной и космической технике и может быть использовано при проектировании и обработке летательных аппаратов с вертикальным взлетом, предназначенных для решения широкого круга задач при полетах в атмосфере и в космосе, при этом главной задачей изобретения является повышение эффективности управления полетом летательного аппарата.
Известно устройство летательного аппарата с вертикальным взлетом [1] Известный летательный аппарат является сходным с предлагаемым по наличию корпуса, реактивных двигателей, устройств изменения положения двигателей и системы управления. Управление известным летательным аппаратом по курсу, тангажу и крену осуществляется за счет рулевых двигателей, которые поворачиваются относительно узлов подвески их к аппарату ко командам, передаваемым от системы управления.
Недостатком известного аналога является то, что его корпус выполнен цилиндрическим (сигарообразным) и имеет относительно большую длину. Вследствие этого при полете в атмосфере он не создает подъемной силы. При действии управляющих усилий и моментов, возникающих за счет быстрого разворота в атмосфере, возникают большие перегрузки, и длинный корпус может разрушиться. Вследствие этого маневр при полете такого летательного аппарата ограничен. Управление полетом с помощью маломощных по отношению к основным маршевым отклоняемых рулевых реактивных двигателей не является эффективным, так как невозможно обеспечить высокое быстродействие управления полетом.
Наиболее близким по технической сущности к заявленному изобретению является выбранным [2] У прототипа и заявляемого изобретения являются следующие сходные существенные признаки: наличие корпуса, реактивных двигателей, устройств изменения положения двигателей и системы управления. Управление полетом такого летательного аппарата осуществляется по командам системы управления за счет поворота сопел разгонных реактивных двигателей на первой ступени и разности тяг основных маршевых двигателей на второй ступени, а также за счет работы вспомогательных управляющих двигателей.
Недостатками известного летательного аппарата с вертикальным взлетом являются: сложность эксплуатации, обусловленная трудностями подготовки и технического обслуживания аппарата в связи с наличием на нем широкой номенклатуры двигателей, оборудования, аппаратуры и использования различных видов топлива; ограниченный диапазон азимутов пуска аппаратов (необходимо предварительное нацеливание); низкое аэродинамическое качество такого летательного аппарата в широком диапазоне скоростей полета, ограниченный маневр и низкое быстродействие управления полетом; весьма продолжительное время торможения, обусловленное отсечкой тяги или выключением основных маршевых двигателей, а значит, отсутствие реверсирования смены направления полета на обратное.
Технической задачей изобретения является повышение эффективности управления полетом за счет быстродействия управления.
Для решения поставленной задачи изобретение содержит летательный аппарат, состоящий из корпуса, реактивных двигателей, системы управления и по сравнению с прототипом отличается тем, что его корпус выполнен в виде тела, образованного вращением окружности радиусом r вокруг вертикальной оси и ограниченному сверху и снизу горизонтальными плоскостями, причем расстояние от центра этой окружности до вертикальной оси составляет от 1-3 радиусов r. Реактивные двигатели скомпонованы и установлены попарно в виде поворотных блоков, которые имеют оси вращения, перпендикулярные к поверхности корпуса, количество блоков, равномерно расположенных по экваториальной плоскости корпуса, составляет не менее шести, а сами блоки установлены подвижно на меридионально расположенных направляющих. В совокупности эти признаки являются достаточным для обеспечения достижения ожидаемого технического результата.
Корпус предлагаемого летательного аппарата представляет собой плоское симметричное тело вращения. Такое тело, находящееся в потоке под углом атаки, способно создавать подъемную силу, что обеспечивает горизонтальный полет аппарата при задресселированных или частью выключенных двигателях.
Широкий маневр летательных аппаратов обеспечивается работой и положением всех блоков реактивных двигателей. При количестве блоков двигателей, равном шести или при большем (но четном), будут создаваться управляющие усилия, способные за очень короткий промежуток времени изменить положение летательного аппарата в пространстве.
При установке двух, трех, четырех или пяти двигателей, как показал анализ, эффективность управления снижается, так как либо двигатели работают несимметрично и возникает разнотяговость, либо в процессе продолжительного полета их попросту необходимо выключать. Поэтому именно шесть блоков двигателей или больше обеспечивает эффективность управления летательным аппаратом с вертикальным взлетом.
Поворот блоков вокруг собственных осей, перпендикулярных поверхности летательного аппарата, обеспечивает очень быстрый переход от одного режима полета к другому, например, от вертикального взлета до горизонтального полета на малой тяге, когда боковые по направлению полета блоки двигателей развернуты на 90o, а передние и задние блоки дросселированы или выключены. Разворот блока двигателей вокруг своей оси осуществляется тоже чрезвычайно быстро за счет тяг спаренных двигателей. Именно с этой целью двигатели спарены в поворотный блок. Симметричность корпуса аппарата и двигателей обеспечивает возможность перемещения его в любом направлении и обеспечивает отсутствие деления на носовую и хвостовую части летательного аппарата, снабженного двумя противоположно расположенными пилотскими кабинами. Предлагаемая в данном изобретении форма корпуса летательного аппарата позволяет перемещать поворотные блоки реактивных двигателей от экваториального сечения в любое другое горизонтальное сечение на боковой поверхности летательного аппарата, представляющей собой поверхность тора, образованного вращением окружности радиуса r. Последнее может быть обеспечено за счет передвижения блока двигателей по меридиально расположенным направляющим.
Горизонтальные поверхности, ограничивающие сверху и снизу корпус летательного аппарата, необходимы для того, чтобы вывести блоки передних и задних реактивных двигателей в положение, когда направление их тяг совпадает с направлением полета. Такое меридиальное перемещение блоков двигателей в плоскости и поворот их относительно собственных осей обеспечивается за счет изменения сил тяги самих двигателей.
Форма корпуса плоское тело вращения необходима для создания подъемной силы в полете; для уменьшения лобового сопротивления; для обеспечения возможности перемещения блоков двигателей по установленным на боковых поверхностях меридиональным направляющим.
Выбор оптимальных значений расстояний от центра окружности до вертикальной оси от 1 до 3 радиусов r окружности обусловлен тем, что при увеличении этого расстояния габариты предлагаемого аппарата будут столь значительными, что вертикальный взлет или другие вертикальные маневры будут неэффективны из-за возрастания массы аппарата и большого лобового сопротивления. Это в конечном счете снижает и технический результат изобретения повышение эффективности его управления за счет увеличения быстродействия, так как в полете возможны любые эволюции, как горизонтальные, так и вертикальные. В то же время нельзя уменьшать это расстояние ниже r, так как уменьшаются ограничивающие тело вращения сверху и снизу горизонтальные поверхности, а они необходимы для выделения блоков двигателей в положение, когда их тяга совпадает с направлением полета, и существенно уменьшаются полезные объемы для размещения оборудования и полезных грузов.
Совокупность признаков, характеризующих заявленное изобретение неизвестна из уровня техники, что позволяет сделать вывод о соответствии изобретения условию "новизна".
Техническая мощность заявленного изобретения не следует для специалиста явным образом из известного уровня техники, что позволяет сделать вывод о соответствии его условию "изобретательский уровень".
Совокупность существенных признаков, характеризующих изобретение, в принципе, может быть многократно использована в авиационно-космической технике с получением технического результата, заключающегося в повышении быстродействия управления полетом летательного аппарата, что позволяет сделать вывод о соответствии изобретения условию "промышленная применимость".
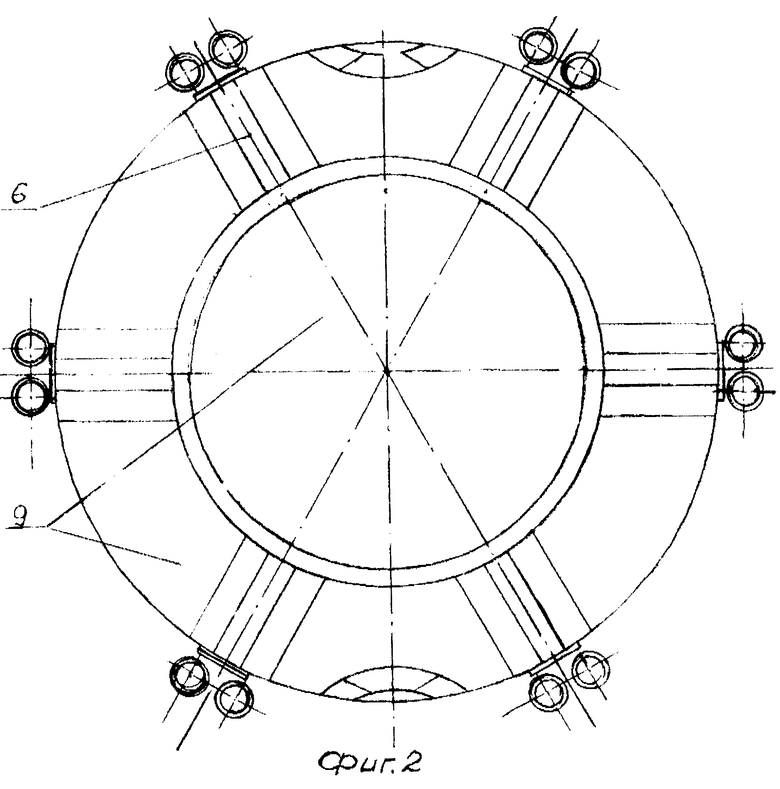
На фиг. 1 изображен летательный аппарат с вертикальным взлетом в положении взлета, вид спереди; на фиг. 2 летательный аппарат в том же положении, вид сверху.
Предложенный летательный аппарат с вертикальным взлетом содержит корпус 1, представляющий собой тело, образованное вращением окружности радиусом r вокруг вертикальной оси АА и ограниченное сверху и снизу горизонтальными плоскостями 2 и 3, причем расстояние L от центра окружности до вертикальной оси АА вращения составляет от 1 до 3 радиусов r. В состав предлагаемого изобретения входят реактивные двигатели 4, соединенные попарно в подвижные блоки 5, имеющие возможность перемещаться в меридиальном направлении и вращаться относительно осей 6. Количество блоков составляет не менее шести, а сами блоки установлены на меридиально расположенных направляющих 7. Аппарат снабжен пилотскими кабинами 8 и грузовыми отсеками 9.
При взлете летательного аппарата подвижные блоки 5 двигателей 4 располагаются, как показано на фиг.1, в экваториальной плоскости ВВ вертикально, создавая максимальную подъемную силу.
В процессе полета летательного аппарата на крейсерском режиме (горизонтальный полет) подвижные блоки 5 реактивных двигателей 4 располагаются так, что продольные оси двигателей принимают направление близкое к направлению полета. При этом экономичность полета обеспечивается расположением двух боковых (по направлению полета) блоков в экваториальном сечении корпуса. Передние блоки по направлению располагаются в нижней части корпуса, на нижней горизонтальной плоскости, ограничивающей корпус, задние блоки в верхней части корпуса, а на верхней горизонтальной плоскости, а сами реактивные двигатели развернуты относительно осей блоков 5 так, что направления векторов и их тяги совпадают с направлением полета.
Для достижения ожидаемого технического результата повышения эффективности управления полетом, используется возможность быстрого передвижения подвижных блоков 5 реактивных двигателей 4 в меридиальном направлении и поворот блоков 5 относительно собственных осей за счет дифференциального изменения тяги двигателей. Это может быть обеспечено за счет разной подачи топлива в камеры двигателей.
В качестве двигателей могут быть использованы уже существующие хорошо зарекомендовавшие себя турбореактивные двигатели (полеты в атмосфере) либо жидкостноракетные двигатели (полеты в атмосфере и космосе). Выбор мощности двигателя определяется задачами, которые могут быть поставлены перед предлагаемым летательным аппаратом.
Таким образом, если развернуть верхние и нижние блоки спаренных двигателей, расположенных на верхней и нижней поверхности летательного аппарата относительно их осей вращения, то в этом случае будут возникать мощные боковые управляющие усилия, способные с высоким быстродействием развернуть аппарат в любом направлении.
Управляющее воздействие можно изменить за счет смещения блоков 5 реактивных двигателей 4 по меридиально расположенным направляющим 7. Изменение режима полета от вертикального к горизонтальному можно обеспечить за счет поворота на 90o двух взаимно противоположных спаренных блоков за счет изменения режимов работы двигателей или перемещения блоков двигателей в нужное положение.
Предложенный летательный аппарат может представить значительный интерес для народного хозяйства, для научных и военных целей.
Использование: в авиационной и космической технике, а также при разработке новых типов летательных аппаратов с вертикальным взлетом. Техническая сущность изобретения заключается в том, что выполненный в виде торообразного круглого тела, ограниченного сверху и снизу плоскими поверхностями, летательный аппарат снабжен подвижными в двух направлениях парными блоками реактивных двигателей. Перемещение блоков по меридианальным направляющим и поворот их относительно осей, перпендикулярных поверхности торообразного корпуса, обеспечивает управление полетом, а изменение режимов работы двигателей позволяет изменять и управлять положением блоков на направляющих. 2 ил.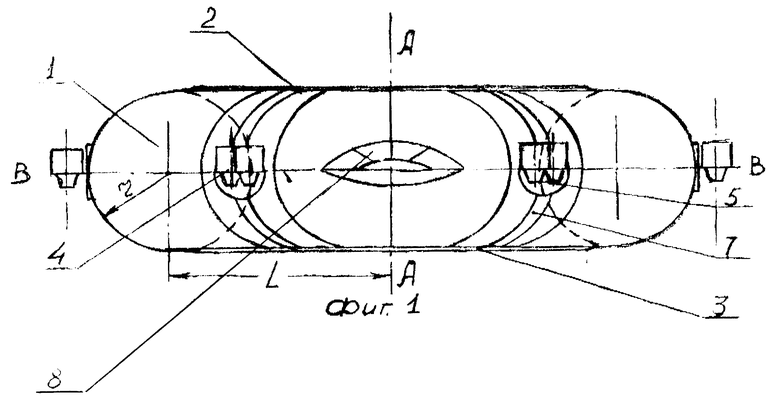
Летательный аппарат с вертикальным взлетом, содержащий корпус, реактивные двигатели, устройство изменения положения двигателей, систему управления, отличающийся тем, что корпус выполнен в виде тела, образованного вращением окружности с радиусом r вокруг вертикальной оси и ограниченного сверху и снизу горизонтальными плоскостями, причем расстояние от центра окружности до вертикальной оси вращения составляет от 1 до 3 радиусов r, реактивные двигатели установлены попарно в виде поворотных блоков, которые имеют оси вращения, перпендикулярные к поверхности корпуса, количество равномерно расположенных по экваториальной окружности корпуса блоков двигателей составляет не менее шести, а сами блоки установлены подвижно на меридиально расположенных направляющих.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Основы проектирования летательных аппаратов (транспортные системы)/Под ред | |||
| Мишина В.М | |||
| - М.: Машиностроение, 1985, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ануриев И.М | |||
| Ракеты многократного использования.- М.: Воениздат, 1975, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
