Изобретение относится к железнодорожному транспорту, в частности к конструкциям тележек локомотивов.
Известна тележка локомотива, содержащая раму с поперечными балками, колесные пары, закрепленные на раме, тяговые электродвигатели, расположенные вертикально над колесными парами и связанные с поперечными балками рамы горизонтальными тягами [1]
Такое расположение двигателей позволяет существенно сократить колесную базу тележки, однако не обеспечивает радиальной установки колесных пар при движении в кривых участках пути, что вызывает повышенный износ гребней бандажей и рельсов.
Известна тележка рельсового транспортного средства, содержащая раму, колесные пары, которые объединены попарно продольными балансирами, образуя подвижные балансирные модули со сферическими подшипниками на шейках осей, тяговые электродвигатели, опирающиеся на колесные пары через моторно-осевые подшипники качения и передающие вращающий момент посредством зубчатой передачи, шкворень и роликовые опоры с резиновыми амортизаторами для соединения рамы с кузовом локомотива [2]
Балансирная система связей колесных пар с рамой тележки позволяет перераспределить горизонтальные силы, действующие от колесных пар на рельсы. Сила, действующая на рельс от первой по ходу колесной пары, уменьшается, а от второй колесной пары увеличивается.
Недостатком конструкции этой тележки является то, что суммарное боковое воздействие на рельсы остается практически неизменным, в результате чего интенсивность износа гребней бандажей и бокового износа рельсов не уменьшается.
Техническим результатом изобретения является снижение бокового воздействия гребней бандажей на рельсы по значению силы и времени их взаимодействия, а также обеспечение радиальной установки колесных пар при движении локомотива в кривых участках пути.
Указанный технический результат достигается тем, что тележка локомотива, содержащая раму, колесные пары, которые объединены попарно продольными балансирами, образуя подвижные балансирные модули со сферическими подшипниками на шейках осей, тяговые электродвигатели, опирающиеся на колесные пары через моторно-осевые подшипники качения и передающие вращающий момент посредством зубчатой передачи, шкворень и роликовые опоры с резиновыми амортизаторами для соединения рамы с кузовом локомотива, снабжена следящей системой для автоматического управления движением тележки в рельсовой колее, включающей в себя исполнительный гидропривод с силовыми цилиндрами, упомянутая рама выполнена с центральной поперечной балкой, которая соединена шарнирно в продольной плоскости симметрии тележки с шапками ближайших к ней тяговых электродвигателей с помощью наклонных тяг, а один из концов продольных балансиров каждого упомянутого модуля шарнирно связан через соответствующий силовой цилиндр исполнительного гидропривода упомянутой следящей системы с рамой тележки.
Кроме этого, следящая система для автоматического управления движением тележки в рельсовой колее состоит из измерительной системы, включающей в себя индукционные датчики, установленные на продольных балансирах при помощи кронштейнов, размещенных над головками рельсов, и исполнительного гидропривода с силовыми цилиндрами и золотниковыми распределителями, а штоковая и бесштоковая полости каждого силового цилиндра исполнительного гидропривода соединены дополнительной магистралью, на которой установлены электрогидравлический клапан и дроссель.
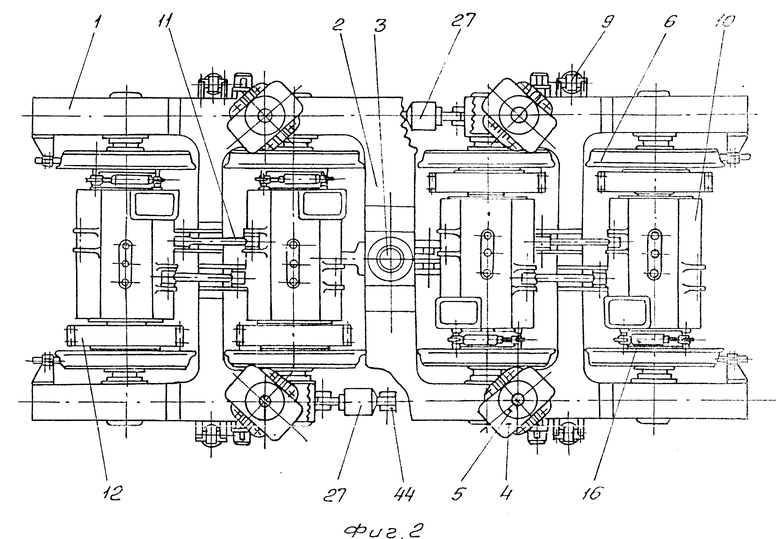
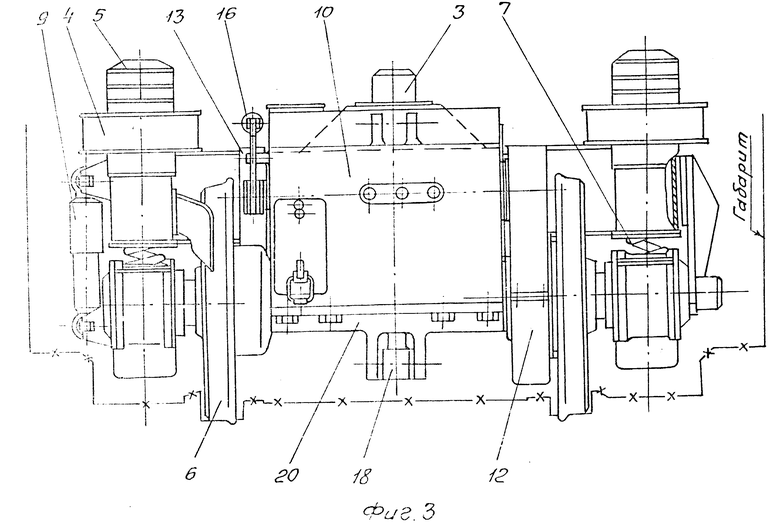
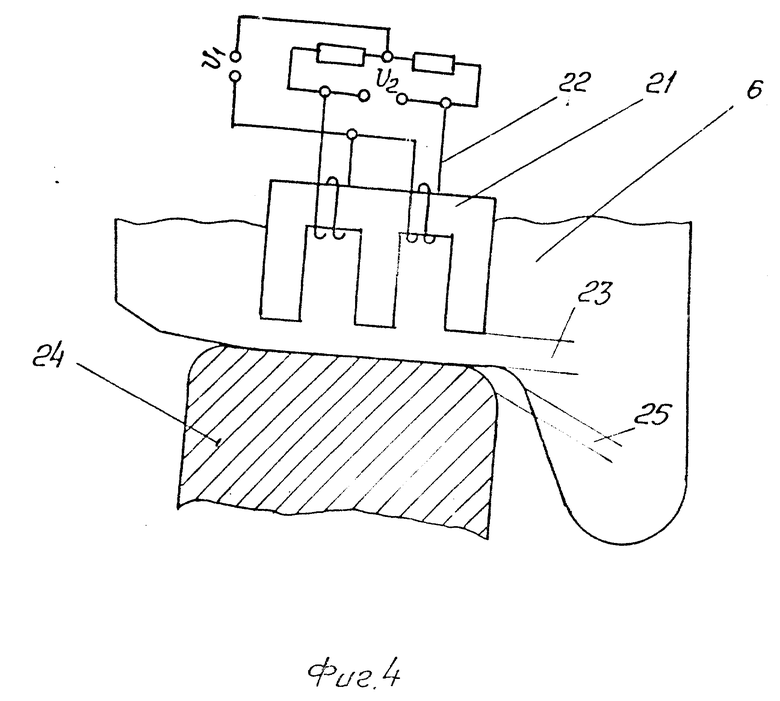
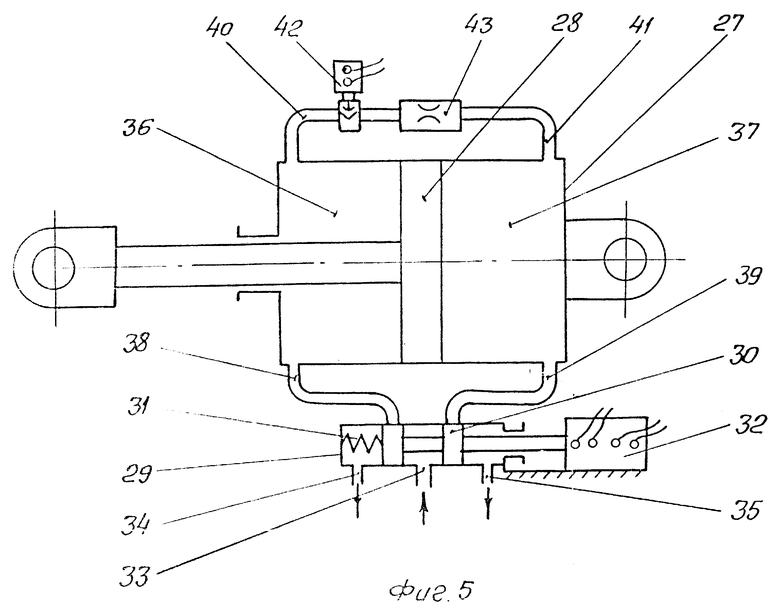
На фиг. 1 изображена тележка локомотива, общий вид; на фиг.2 то же, вид сверху; на фиг.3 то же, вид справа; на фиг.4 схема датчика положения колесных пар тележки в рельсовой колее; на фиг.5 схема силового исполнительного гидропривода двухстороннего действия.
Тележка локомотива со следящей системой автоматического управления в четырехосном исполнении (фиг.1 3) содержит раму 1 с тремя поперечными балками 2, в центре средней из которых вварен шкворень 3. Шкворень 3 входит в гнездо шарового шарнира, размещенного на кузове локомотива (на фиг.1 3 не показан). Для опоры кузова локомотива (на чертежах не показан) на раму 1 тележки последняя содержит четыре роликовых опоры 4 с возвращающим устройством в виде наклонных элементов и резиновыми амортизаторами 5. Шкворень 3 совместно с опорами 4 обеспечивает передачу силы тяги на кузов и возможность поворота и поперечного отклонения рамы 1 относительно кузова в горизонтальной плоскости с заданными характеристиками возвращающей силы и момента.
Для передачи вертикальной нагрузки рама 1 (фиг.1) связана с колесными парами 6 через четыре комплекта пружин 7 типа "флексикойл", опирающихся на продольные балансиры 8, которые жестко посредством сферических подшипников (на фиг. 1 не показаны) связывают между собою в продольной плоскости шейки осей двух первых и двух вторых колесных пар 6, образуя в раме 1 тележки самостоятельные двухосные балансирные модули. Эти модули имеют возможность поворота и поперечного отклонения в горизонтальной плоскости относительно рамы 1 тележки. Сферические подшипники в продольных балансирах 8 позволяют колесным парам 6 модулей поворачиваться относительно друг друга в трех ортогональных плоскостях. Параллельно с комплектами пружин 7 установлены пневматические гасители колебаний 9.
Тяговые электродвигатели 10 смонтированы вертикально над колесными парами 6 и опираются на них с помощью полых валов и мощных моторно-осевых сферических подшипников качения (на фиг.1 3 не показаны), образуя колесно-моторный блок. Вверху тяговые электродвигатели 10 соединены с поперечными балками 2 рамы 1 тележки горизонтальными реактивными тягами 11, которые с целью увеличения их длины немного смещены от продольной оси тележки, чтобы не мешать друг другу. В кожухе 12 колесно-моторного блока расположена одноступенчатая зубчатая передача с вертикальным расположением централи. Благодаря такому расположению тяговых электродвигателей 10 колесная база тележки получается наименьшей.
На коллекторной стороне тяговых электродвигателей 10 смонтирован быстроходный колодочный тормоз, состоящий из тормозного шкива 13, напрессованного на хвостовик вала якоря, двух рычагов 14 с тормозными колодками 15 и гидроцилиндра 16. Дополнительно к быстроходным колодочным тормозам установлены односторонние колодочно-бандажные тормоза 17 также с гидроприводом.
Для передачи силы тяги и торможения средняя (центральная) поперечная балка 2 рамы 1 тележки связана с двухосными балансирными модулями посредством центрально расположенных наклонных тяг 18 и 19, одна из которых в верхней части имеет вильчатую конструкцию, что позволяет увеличить их длину и уменьшить угол наклона их к горизонту. Вверху наклонные тяги 18 и 19 прикреплены шарнирно к центральной поперечной балке 2 рамы 1, а внизу соединены шарнирно с шапками 20 моторно-осевых подшипников качения тяговых электродвигателей 10 на средних осях колесных пар 6 тележки. Наклонные тяги 18 и 19 обеспечивают минимальное изменение осевых нагрузок колесных пар 6 при реализации сил тяги и торможения.
Тележка локомотива оборудована следящей системой для автоматического управления (САУ) движением ее в прямых и кривых участках пути. САУ состоит из четырех основных блоков: измерительной системы, исполнительного гидропривода с золотниковым распределителем, насосной станции с электроприводом и ремиконта типа МикроДат.
Измерительная система каждого двухосного балансирного модуля состоит из четырех индукционных датчиков 21 с дифференциальной схемой включения обмоток 22 (фиг.4), обеспечивающей малую чувствительность их к колебанию вертикального зазора 23 над рельсом 24 и высокую чувствительность при измерении зазора 25 между гребнем бандажа колесной пары 6 и головкой рельса 24. Датчики 21 укреплены к продольным балансирам 8 с помощью кронштейнов 26 (фиг.1). Сферические подшипники качения не позволяют продольным балансирам 8, а следовательно, и индукционным датчикам 21 смещаться в поперечном направлении относительно колесных пар 6 на величину более 0,6 мм. Благодаря этому погрешность измерения зазора 25 между гребнем бандажа колесной пары 6 и головкой рельса 24 не будет превышать значения ±1 мм, что вполне приемлемо для работы САУ тележки.
Исполнительный гидропривод (фиг.5) состоит из силового цилиндра 27, поршня 28 со штоком, золотникового распределителя, включающего в себя цилиндр 29 малого диаметра, двухпоршневой золотник 30 со штоком, соединенный с одной стороны пружиной 31 с цилиндром малого диаметра 29, а с другой с якорем электромагнитного привода 32 двухстороннего действия. Цилиндр 29 малого диаметра выполнен с тремя каналами: средний канал 33 служит для подвода масла под давлением от насосной станции в полость между поршнями золотника 30, два крайних канала 34 и 35 служат для слива масла.
Штоковая полость 36 и бесштоковая полость 37 силового цилиндра 27 имеют соответственно каналы 38 и 39, перекрытые в статике поршнями золотника 30. Дополнительно штоковая 36 и бесштоковая 37 полости соединены каналами 40 и 41, на которых установлены электрогидравлический клапан 42 и дроссель 43.
Цилиндры 27 силового исполнительного гидропривода установлены с помощью кронштейнов 44 (фиг.1 и 2) на раме 1 тележки, и они посредством сферических шарнирных подшипников типа "ШС" связывают раму с продольными балансирами 8 двухосных модулей.
Для питания силовой магистрали маслом под давлением (порядка 2 МПа) используется типовая насосная станция с приводным электродвигателем мощностью около 2 кВт с гидроаккумулятором и фильтрами грубой и тонкой очистки. Располагается станция в кузове локомотива и на фиг. 1 5 не показана.
Ремиконт типа МикроДат на двенадцать входов и двенадцать выходов объединяет все блоки в единое целое и обеспечивает логическое управление движением тележки в прямых и кривых участках пути по результатам измерений индукционных датчиков 21. Ремиконт также не показан на фиг.1 5, так как его устройство не имеет принципиального значения к новизне заявленной тележки локомотива со следящей системой управления.
Тележка локомотива со следящей системой управления работает следующим образом: тяговые электродвигатели 10 совместно с колесными парами 6 развивают силы тяги, которые приложены в контактах бандажей колесных пар 6 с рельсами 24. Реактивные усилия от тяговых электродвигателей 10 воспринимаются горизонтальными реактивными тягами 11 и передаются на крайние поперечные балки 2 рамы 1 тележки и от нее с помощью центрально расположенного шкворня 3 на кузов локомотива. Аналогичным путем передаются и силы торможения тележки. Наклонные тяги 18 и 19 обеспечивают равномерное распределение осевой нагрузки на рельсы при реализации тяги и торможения.
Вертикальная нагрузка от кузова передается на раму 1 тележки через четыре роликовые возвращающие опоры 4 с резиновыми амортизаторами 5 и далее через четыре комплекта пружин 7 типа "флексикойл" на продольные балансиры 8 и колесные пары 6. Для демпфирования колебаний обрессоренных масс параллельно комплектам пружин 7 служат пневматические гасители колебаний 9.
Благодаря такой конструкции двухосные балансирные модули могут не только из прямоугольного расположения колесных пар 6 и продольных балансиров 8 образовывать параллелограмм, как это имеет место у прототипа (балансирная связь в горизонтальной плоскости), но и дополнительно поворачиваться вокруг вертикальной оси относительно рамы 1 тележки, чего прототип не позволяет.
Именно эта особенность заявленной конструкции тележки дает возможность обеспечить радиальную установку колесных пар 6 при движении в кривых участках пути.
Учитывая, что направляющее действие колесных пар 6 в рельсовой колее при реализации тяги сильно ослабляется, в тележке действует следящая система автоматического управления движением двухосных модуле в прямых и кривых участках пути с целью уменьшения силы и времени взаимодействия гребней бандажей с рельсами 24.
Работает она следующим образом: микропроцессор ремиконта МикроДат через каждые 28 мкс спрашивает индукционные датчики 21, которые реагируют не изменение площади поперечного сечения магнитопровода над головкой рельса 24, путем разбалансировки напряжений U1 и U2 дифференциальной обмотки 22 измеряют зазоры 25 между гребнями бандажей колесных пар 6 и рельсов 24.
Логика управления ремиконта настроена так, что как только гребень первой колесной пары 6 приблизится к головке рельса 24 слева на расстояние, например, 2 мм на его выходе вырабатывается сигнал, который включит электромагнитный привод 32 двухпоршневого золотника 30 золотникового распределителя-цилиндра 29 малого диаметра и одновременно электрогидравлический клапан 42 перекроет каналы 40 и 41, соединяющие штоковую 36 и бесштоковую 37 полости силового цилиндра 27, а золотник 30 соединит бесштоковую полость 37 по каналу 39 с напорной магистралью 33, а штоковую полость 36 по каналу 38 со сливной магистралью 34. Поступающее в бесштоковую полость 37 масло под давлением от типовой насосной станции будет давить на поршень 28 и далее сила будет передаваться через шток на продольный балансир 8. Наклонная тяга 18 будет удерживать двухосный балансирный модуль от продольного смещения относительно рамы 1 тележки.
Под действием пары сил двухосный балансирный модуль начнет поворачиваться вокруг вертикальной оси относительно рамы 1 тележки и гребень бандажа передней колесной пары 6 будет удаляться от левого рельса 24, так и не коснувшись последнего. Когда же зазор 25 между гребнем бандажа передней колесной пары 6 и головкой рельса 24 увеличится, например, до 5 мм, ремиконт МикроДат отключит электромагнитный привод 32 силового исполнительного гидропривода и электрогидравлический клапан 42. Под действием пружины 31 двухпоршневой золотник 30 займет среднее положение и перекроет каналы 38 и 39. С этого момента штоковая 36 и бесштоковая 37 полости силового цилиндра 27 будут соединяться между собой по каналам 40 и 41 через дроссель 43 и открытый электрогидравлический клапан 42, т.е. силовой цилиндр 27 с этого момента будет работать как гидродемпфер, уменьшая интенсивность поворотных колебаний двухосного балансирного модуля в горизонтальной плоскости.
При подходе гребня бандажа передней колесной пары 6 к головке рельса 24 справа так, что зазор 25 примет значение, например, 2 мм, ремиконт МикроДат включит вторую катушку электромагнитного привода 32, который переместит двухпоршневой золотник 30 так, что штоковая полость 36 будет соединена по каналу 38 с напорной магистралью 33, а бесштоковая полость 37 по каналу 39 - со сливной магистралью 35. При этом под действием противоположной силы, действующей на поршень 28 и далее на продольный балансир 8, двухосный балансирный модуль начнет разворачиваться в обратном направлении, не допуская контакта гребня бандажа передней колесной пары 6 с рельсом 24.
Аналогичным образом работает следящая система управления движением второго двухосного балансирного модуля.
При движении тележки в кривых участках пути силовые цилиндры 27 по команде ремиконта МикроДат, которая вырабатывается по показаниям индукционных датчиков 21, будут разворачивать балансирные двухосные модули относительно рамы 1 веером в сторону внешнего рельса 24, т.е. следящая система управления будет обеспечивать радиальную установку колесных пар 6. При этом будет обеспечиваться минимальное взаимодействие гребней бандажей колесных пар 6 с боковой поверхностью головки внешнего рельса 24 по параметрам их износа.
Применение следящей системы управления движением тележки в прямых и кривых участках пути позволит в четыре-пять раз снизить интенсивность подреза гребней бандажей локомотивов. Соответственно снизится и интенсивность бокового износа головок рельсов, приходящаяся на долю локомотива. При этом срок службы бандажей в эксплуатации удвоится.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО СРЕДСТВА | 1996 |
|
RU2094273C1 |
| ТЯГОВЫЙ ПРИВОД ЛОКОМОТИВА | 1998 |
|
RU2128595C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ СИЛ ТЯГИ И ТОРМОЖЕНИЯ ЛОКОМОТИВА | 1997 |
|
RU2126338C1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БОКОВОГО ВОЗДЕЙСТВИЯ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПУТЬ | 2000 |
|
RU2174477C1 |
| ЧЕТЫРЕХОСНАЯ ТЕЛЕЖКА ЛОКОМОТИВА С РАДИАЛЬНОЙ УСТАНОВКОЙ КРАЙНИХ КОЛЕСНЫХ ПАР | 2002 |
|
RU2220064C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2087356C1 |
| ТРЕХОСНАЯ ТЕЛЕЖКА С РАДИАЛЬНО УСТАНАВЛИВАЮЩИМИСЯ КОЛЕСНЫМИ ПАРАМИ | 2001 |
|
RU2193986C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОЛЕСНОЙ ПАРЫ В РЕЛЬСОВОЙ КОЛЕЕ И ШИРИНЫ КОЛЕИ | 1995 |
|
RU2104198C1 |
| ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2090408C1 |
Использование: в локомотивах. Сущность изобретения: тележка содержит раму, которая выполнена с центральной поперечной балкой, колесные пары, которые объединены попарно продольными балансирами, образуя подвижные балансирные модули со сферическими подшипниками на шейках осей, тяговые электродвигатели, опирающиеся на колесные пары через моторно-осевые подшипники качения и передающие вращающий момент посредством зубчатой передачи, шкворень, роликовые опоры с резиновыми амортизаторами для соединения рамы тележки с кузовом локомотива и следящую систему для автоматического управления движением тележки в рельсовой колее, которая выполнена с исполнительным гидроприводом, имеющим силовые цилиндры. Центральная поперечная балка рамы соединена шарнирно в продольной плоскости симметрии тележки с шапками ближайших к ней тяговых электродвигателей с помощью наклонных тяг, а один из концов продольных балансиров каждого двухосного модуля связан шарнирно через силовые цилиндры исполнительного гидропривода следящей системы с рамой тележки. 2 з.п.ф-лы, 5 ил.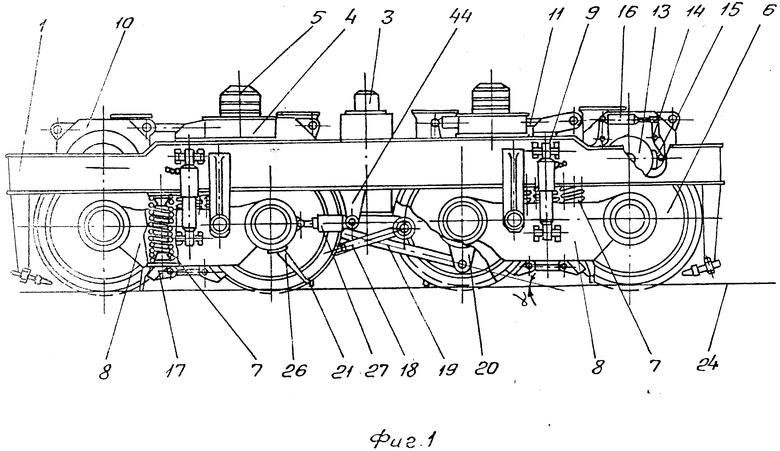
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2022850, кл.B 61F 3/04, 1994 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тележка рельсового транспортного средства | 1989 |
|
SU1664634A1 |

