Изобретение относится к технике малой механизации работ в условиях фермерских и приусадебных хозяйств, строительных площадок, цеховых и складских помещений, ангарах и парниках и иных аналогичных работах на ограниченных электрифицированных и неэлектрифицированных площядях.
Задача изобретения получение энергии целенаправленного действия с различными параметрами (1), увеличение управляемости (2), маневренности (3) и КПД (4), расширение технологических возможностей (5), увеличение тягового усилия (6) и автономности (7), уменьшение потерь энергии (8) и увеличение коэффициента мощности (9) тягача; создание такой электромеханической системы, которая, имея ограниченную мощность, позволяла бы нормально функционировать рабочим машинам и инструменту при их резко переменных механических нагрузках (10).
Известны транспортные средства с моторными приводами, в частности сельскохозяйственные тракторы, тележки, тягачи, электробуксиры и т. п. (заявка ФРГ N OS 3107228, B 62 D 49/00, 23.09.82, N 38; многоцелевая сельскохозяйственная самоходная тележка с двигателем патент Великобритании N 2093415, B 62 D 49-06, от 02.09.82, N 4879; тягач патент Японии N 57-43468, B 62 D 49/06, B 64 G 1/10 от 14.09.82, N 2-1087; трактор патент Европейского патента ведомства N 0048777, B 62 D 49/06 от 07.04.82, N 14; блок с двигателем патент ЕПВ N 0054875, B 62 D 49/06, 51/06, 53/04, 30.06.82, N 26; тягач для навесного и прицепного оборудования авт.свид. СССР N 1013330, B 62 D 49/06 от 23.04.83, N 15; буксирное транспортное устройство для аэропортов патент ФРГ N OS 3227246, B 62 D 49/00 от 03.03.83, N 9; трактор патент США N 43633374, B 62 D 49/00 от 14.12.81 т.1025 N 2; колесный тягач авт.свид. СССР N 1030234, B 62 D 49/02 от 23.07.83, N 27; сельскохозяйственное транспортное средство заявка ЕПВ N 0075484, B 62 D 49/06, 21/18 от 30.03.83, N 13; малогабаритный четырехколесный трактор заявка Японии N 58-52865, B 62 D 49/00 от 25.11.83, N 2-1322; тягач буксировки с/х машин заявка Франции N 2535668, B 62 D 49/00, B 60 D 1/08 от 11.05.84, N 19; трактор заявка ФРГ N OS 3342025, B 62 D 49/06 от 24.05.84, N 21; самодвижущееся грузовое транспортное средство заявка ФРГ N OS 3300335, B 62 D 49/06 от 12.07.84, N 28; трехколесное транспортное средство авт. свид. СССР N 1221017, B 62 D 61/08 от 30.03.86, N 12; полноприводной трактор авт. свид. СССР N 1437251 AI, B 62 D 49/08 от 15.11.88, N 42; полноприводное транспортное средство - авт.свид. СССР N 1357269 AI, B 62 D 7/14 от 07.12.87, N 45; тягач для перемещения прицепов и полуприцепов авт.свид. СССР N 371115, B 62 D 49/04 от 22.11.73, N 12; электротрактор кабельного питания авт.свид. СССР N 97794, кл. 45а, 32), которые в качестве двигательных устройств используют известные тяговые двигатели, отличаются конструкцией и техническими возможностями механизма передвижения, сцепки, кабелеукладывающего механизма и другими локальными элементами, и по совокупности, кроме позиций 6 и 7, не решают поставленную задачу.
Известны также узлы электроснабжения транспортных средств гибкими токопроводами и устройства для натяжения и координации токоподводящего кабеля (гибкий токопровод для транспортного средства авт.свид. СССР N 1306756 AI, B 60 L 5/00 от 30.04.87, N 16, устройство для натяжения кабеля авт.свид. СССР N 1449385 AI, B L 9/08 от 07.01.89, N 1 и кабельное питание с вертикальным барабаном электротрактора авт.свид. СССР N 97794 кл. 45а, 32), которые имеют первый упорные ролики, упорный узел и контрольный блок со схемой защиты и концевыми выключателями, второй кабельный барабан с электроприводом его вращения, а третий кабелеукладывающий механизм над барабаном на стреле с приводом согласованного вращения и удерживающее устройство с роликами, стянутыми пружинными рамками и не решает поставленную задачу по позициям 4, 6, 7, 8 и 9.
Наиболее близким к изобретению по существу и совокупности признаков являются тягач для перемещения прицепов и полуприцепов (авт.свид. СССР N 371115 B 62 D 49/04 от 22.11.73 г.), электробуксир Б.И.Декопова для передвижения транспортных средств (авт. свид. СССР N 1167095 A, B 62 D 49/04 от 15.07.85, N 26) и трактор с электрическим приводом и двойным сочленением для внутрихозяйственных работ в животноводческих помещениях (DE, AI N 3327831, B 62 D 49/00, 1985).
Первый отличается тем, что механизм передвижения выполнен в виде установленных на боковых стенках шасси тяговых двигателей, кинематически соединенных с ведущим обрезиненным колесом и что сцепка выполнена в виде вертикального вала, являющегося осью поворота тягача, с запорными планками, установленными на тягаче, взаимодействующими с полуцилиндром, снабженным пазом и прорезями под запорные планки, установленным на прицепе.
Второй выполнен на основе аккумуляторного электропривода и отличается тем, что система управления снабжена двумя контроллерами, один из которых размещен на площадке буксира, а другой в кабине транспортного средства, причем электропривод ведущего моста содержит двигатель постоянного тока, электромагнитный тормоз, пусковые реле и реле управления, причем последними двигатель и тормоз подключены к контроллерам. Кроме того, сцепка буксира снабжена двигателем перемещения, концевыми выключателями, контактным реле, кнопками выключения и переключателем, с помощью которых двигатель перемещения подключен к системе управления.
Третий отличается тем, что он имеет два шарнира сочленений. Шарнир состоит из пальца, который поворотно установлен в переднем и заднем блоках и закреплен с помощью вертикально расположенного пальца, закрепленного в раме шарнира.
Видно, что ни тягач для перемещения прицепов и полуприцепов, ни электробуксир, ни трактор с электрическим приводом назвать аналогом изобретения нельзя, так как указание лишь на механизмы передвижения, установленные на боковых стенках, и специальную конструкцию сцепки тягача, на два контроллера в системе управления, размещенных по различным местам, на традиционный состав электропривода и подключение его устройства управления к системе управления буксира или на электрический привод и на два шарнира сочленений, выполненных определенным образом, не решает задачу в целом. Техническое решение тягача, буксира и трактора не позволяет достичь совокупности целей, поставленных перед изобретением.
Решение поставленной технической задачи получение энергии целенаправленного действия с различными параметрами, увеличение управляемости, маневренности и КПД, расширение технологических возможностей, увеличение тягового усилия и автономности, уменьшение потерь энергии и увеличение коэффициента мощности, а также создание электромеханической системы ограниченной мощности, способной обеспечить нормальную работу рабочим машинам и инструменту при их резкопеременной механической нагрузке достигается выполнением колесного электромеханического тягача в виде одного ведущего рулевого блока (фиг. 1 и 2), двух блоков, шарнирно соединенных платформой, один из которых является рулевым ведомым, а другой силовым ведущим (фиг.3 и 4) и двух ведущих шарнирно связанных силовых блоков, один из которых является рулевым (фиг.5 и 6).
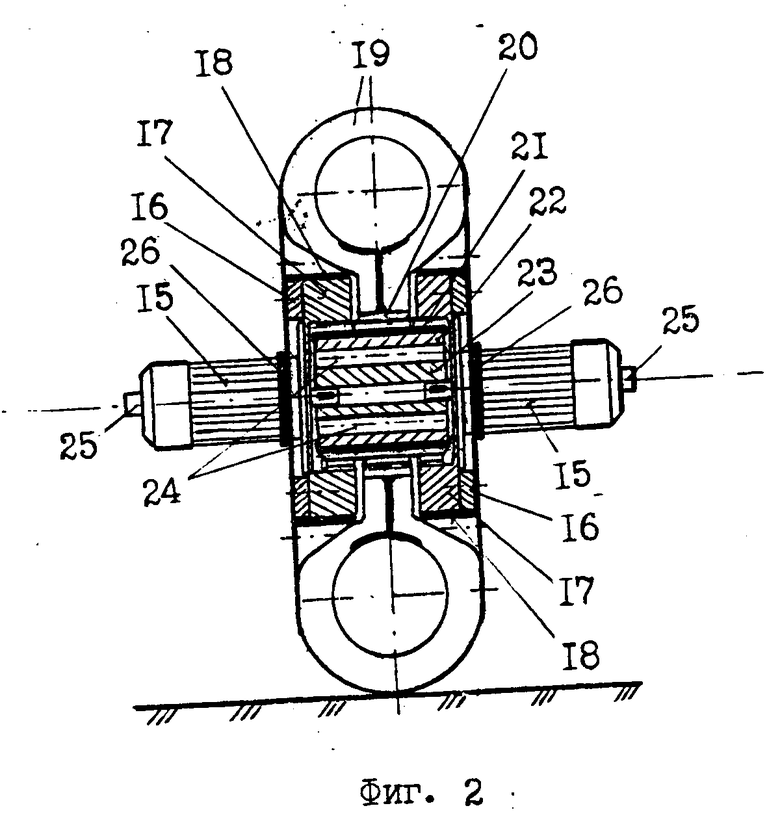
Повышение КПД при одновременном увеличении управляемости и маневренности достигается применением в колесном электромеханическом тягаче (фиг.1 и 2) одного ведущего рулевого блока, состоящего по меньшей мере из одноколесного 19 рулевого агрегата 13 с рычажно-рулевым устройством 16 и противовесом 14, компенсирующим силы тяжести навесных рабочих машин и орудий, который может быть заменен аккумуляторной батареей с преобразователем или без него, и электрического модуль-привода с двумя вращательными электродвигателями 12, 15, свободные концы валов которых имеют унифицированные присоединительные размерные места для отбора мощности 25, между двигателями 12, 15 установлены передаточное устройство в форме комбинированного волнового редуктора с роликовым эксцентриковым генератором волн, имеющего жесткие корпусные зубчатые мелкомодульные колеса 17, подшипники скольжения 18, ходовое пневмоколесо 19, жесткое ведомое зубчатое мелкомодульное колесо 20, ответное зубчатое гибкое либо плавающее колесо 21, внешнюю обойму роликового подшипника-толкателя 22, внутреннюю обойму роликового подшипника-толкателя 23, ролики генератора волн 24, а также колесный агрегат 13 так, что пневмоколесо 19 его охватывается портальной подпружиненной с защелкой стояночной опорой-подъемником 26, шарнирно укрепленным свободными концами к корпусам электродвигателей 15, 12.
Система электроснабжения тягача: гибкий кабель 1, устройство координации кабеля 2, кабельный барабан с пружинным самовозвратом 3, поворотное основание 4 и силовой кабель 5 смонтирована над колесным агрегатом 13, а управляющее устройство с узлом последовательно-параллельного пуска и останова двигателей 12, 15: контрольный кабель 6, пульт управления 7, аппаратура автоматического пуска и защиты 9 модуль-привода на рулевых рычагах 8.
Такие редуктор, система электроснабжения и управляющее устройство позволяют водителю управлять двигателями 12, 15 как совместно, так и раздельно, а также постоянно контролировать работу тягача и целенаправленно управлять им. Устройство крепления навесных орудий с унифицированными присоединительными размерами 11 предназначено для различных сельскохозяйственных и иных орудий и механизмов, например плуга 10.
Повышение КПД тягача достигается применением двухдвигательного устройства и управляющего устройства с узлом последовательно-параллельного пуска и останова и возможностью совместной и раздельной работы. Такое решение требует меньшей энергии при переходных режимах и позволяет экономить ее при установившемся движении тягача с малыми нагрузками, например при движении тягача без навесных орудий.
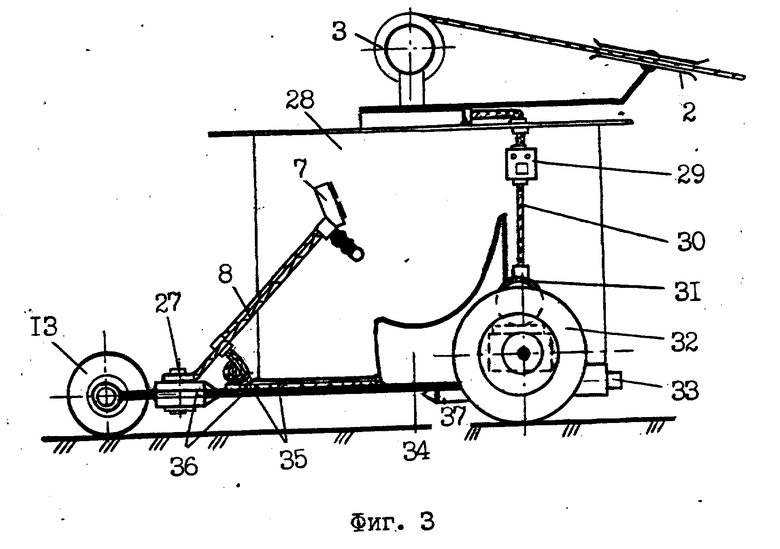
Расширение технологических возможностей, увеличение тягового усилия и автономности при сохранении способности обеспечить нормальную работу рабочим машинам и инструменту при их резкопеременной механической нагрузке достигается выполнением колесного электромеханического тягача (фиг.3 и 4) в виде шарнирно соединенных 27 платформой 36 двух блоков, первый из которых 13 является рулевым ведомым одноколесным по меньшей мере агрегатом с рулевыми рычагами 8 для водителя и с ручным электроуправлением 7 электрическим модулем-приводом 31, а второй силовым ведущим блоком в форме ведущего электромеханического моста с двумя пневмоколесами 32, установленных с возможностью ручного регулирования колеи на оси и имеющих места крепления навесных орудий и машин с унифицированными присоединительными размерами 27, 33. В районе кабины водителя 28 и его кресла 34 смонтирована система электроснабжения и технические средства управления и защиты электрического модуль-привода 31; кабельный барабан с пружинным самовозвратом 3, устройство координации кабеля 2, аппаратура автоматического пуска и защиты 29, силовой кабель 30 и контрольные кабели и провода системы дистанционного управления и контроля 35. Устройства отбора мощности с разными параметрами (на фиг. 3 не показаны) используются совместно с подъемником 37.
Все это позволяет получить не только экогологически чистую механическую энергию целенаправленного действия с различными параметрами, повышенную маневренность и большие технологические возможности тягача, но и создать электромеханическую систему, способную обеспечить нормальную работу от устройств отбора мощности рабочих орудий и инструмента при их резкопеременных механических нагрузках. Последнее достигнуто за счет использования запасов кинематической энергии пневмоколес 32 через два устройства отбора мощности 46 от двух валов передаточного устройства модуль-привода 31 ведущего электромеханического моста с колесами 32, которое выполнено из двух пар конических зубчатых колес 38, 39, 40, 41, волнового или циклоидного зубчатого механизма 42, 43, 44, 45, при положении подъемника 37 в позиции стояночной опоры.
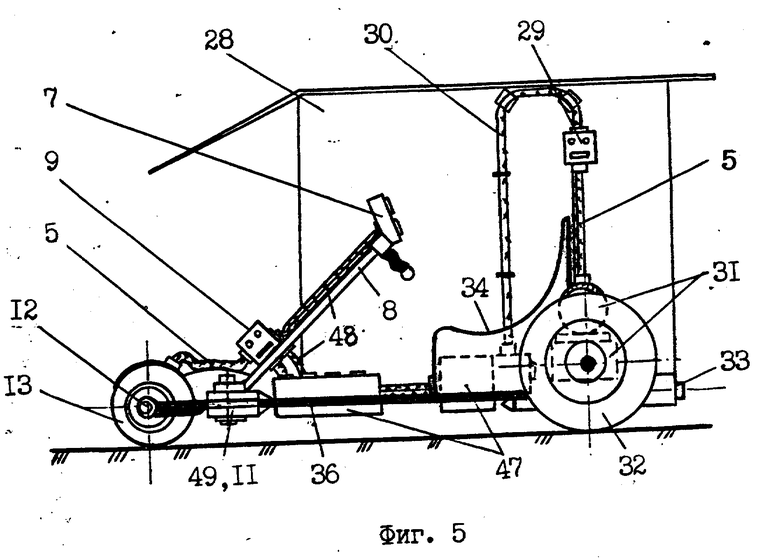
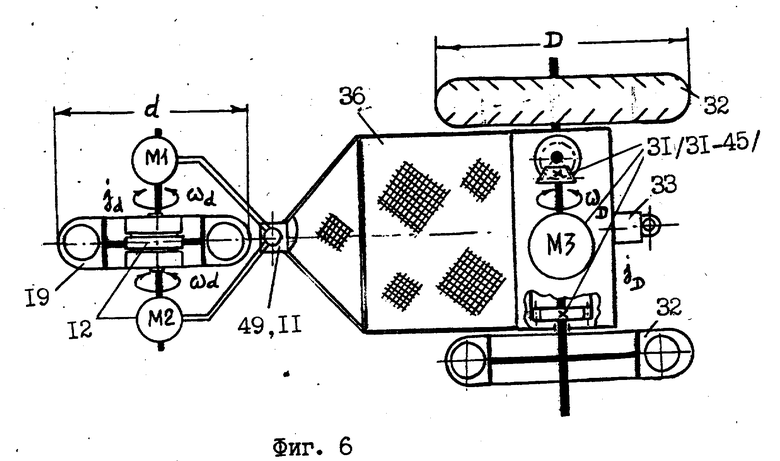
Увеличение коэффициента мощности тягача, его тягового усилия, маневренности и автономности, а также расширение технологических возможностей и уменьшения потерь энергии достигается применением двух ведущих блоков (фиг. 5 и 6): первого рулевого 13 с диаметром колес d и передаточным числом jd 13, 12, 5, 9, 7, 48, 8 без кабельной системы электроснабжения и противовеса и второго электромеханического моста 31, 38-45 с диаметром D колес 32 и передаточным числом jD 5, 29, 31, 33, 32, шарнирно сферической парой 49, 11 соединенных между собой платформой 36. Система электроснабжения выполнена главным и вспомогательным источниками 47 так, что потери электроэнергии в проводах и кабелях минимальны, причем при одинаковых скоростных параметрах электродвигателей передаточные числа модуль-приводов относятся как диаметры колес jd/jD= d/D, при одинаковых кинематических параметрах отношение скоростных определяется обратной зависимостью ωd/ωD = D/d. Устройства отбора мощности тягача используются при действии стояночных подъемников-опор, которые установлены встречно и, при работе тягача в режиме "отбор мощности" не позволяют ему переходить в транспортное положение.
В схемах электропитания двигателей установлены конденсаторы, причем, если двигатели трехфазные асинхронные и включены по схеме "звезда" или "треугольник", то конденсаторный компенсатор собирается соответственно "звездой" или "треугольником " с автоматическим управлением от последовательно включенного в один из линейных проводов максимально-токового реле, настроенного на ток Iл≅0,3•Iлн, где Iлн - линейный номинальный ток двигателя. Так как при малых нагрузках на асинхронные двигатели их коэффициент мощности меньше значения 0,4, то величина полной мощности потребления ими энергии существенно возрастает и приводит к ухудшению технико-экономических показателей тягача. Последнее предложение увеличивает коэффициент мощности тягача и создает условия для уменьшения потерь энергии в проводах и кабелях.
Повышение маневренности и устойчивости тягача (фиг.5 и 6) достигается одновременным использованием автономного источника постоянного тока 47 и модуль-приводов 12 и 31 (31-45) постоянного тока со смешанным возбуждением, а также специальным размещением их на платформе 36: по краям платформы против колес 32 электромеханического моста так, что задние границы кресла 34 водителя в кабине 28 и главного источника постоянного тока 47 находятся на одной линии, а источника постоянного тока тягача (фиг.1) вместо противовеса. При этом колесный электромеханический тягач может быть выполнен с автономным экологически чистым источником постоянного тока, например в виде солнечных батарей, а его система управления изготовлена с программируемым микропроцессором, причем электродвигательные устройства модуль-приводов оснащены двигателями постоянного тока с последовательным или смешанным возбуждением различного конструктивного исполнения, что увеличивает экологическую чистоту тягача и повышает его управляемость.
Перечень фигур
Фиг. 1 колесный электромеханический тягач с рулевым ведущим блоком из одноколесного агрегата и двухдвигательного электрического модуль-привода:
1 гибкий кабель; 2 устройство координации кабеля; 3 кабельный барабан с самовозвратом; 4 поворотное основание; 5 силовой кабель; 6 - контрольный кабель; 7 пульт управления электрическим модуль-приводом; 8 - рулевые рычаги; 9 аппаратура автоматического пуска и защиты электрического модуль-привода; 10 навесное орудие, например плуг; 11 устройство крепления навесных орудий с унифицированными присоединительными размерами; 12 - электродвигатель модуль-привода (два двигателя, см. фиг.2 поз. 15); 13 - рулевой колесный агрегат; 14 противовес.
Фиг. 2 рулевой колесный агрегат с двухдвигательным электрическим модуль-приводом:
15 электродвигатели вращательного действия; 16 рычажно-рулевое устройство; 17 корпусные жесткие зубчатые колеса волнового (циклоидного) механизма; 18 подшипник скольжения; 19 ходовое пневмоколесо; 20 колесо зубчатое жесткое ступица рулевого ходового колеса; 21 гибкое (плавающее жесткое) зубчатое колесо; 22 генератор механических колебаний подшипниковый; 23 муфта соединительная с эксцентрисистетой; 24 ролики; 25 узел отбора мощности; 26 опора-подъемник.
Фиг. 3 колесный электромеханический тягач с рулевым ведомым агрегатом (РВА) и силовым ведущим блоком (СВБ)/:
13 колесный РВА; 27 устройство шарнирного соединения РВА с платформой СВБ и крепления навесных рабочих орудий и машин с унифицированными присоединительными размерами; 8 рулевые рычаги РВА; 7 пульт управления электрическим модуль-приводом СВБ; 28 кабина водителя; 3 кабельный барабан с самовозвратом; 2 устройство координации кабеля; 29 аппаратура автоматического пуска и защиты электрического модуль-привода СВБ, например магнитный пускатель; 30 кабель питания СВБ; 31 электрический модуль-привод СВБ; 32 колесный агрегат СВБ на общей оси с возможностью ручного регулирования коллеи (см. фиг.4); 33 устройство крепления транспортируемых орудий и рабочих машин с унифицированными присоединительными размерами; 34 - кресло водителя; 35 контрольные кабели и провода системы дистанционного управления и контроля; 36 платформа СВБ с опорой-подъемником 37.
Фиг. 4 схема ведущего электромеханического моста с однодвигательным электрическим модуль-приводом:
31 электродвигательное устройство вращательного действия; 32 ходовое пневмоколеса с возможностью ручного регулирования коллеи; 36 стойки опорные платформы СВБ; 38 ведущее коническое зубчатое колесо первой пары редуктора СВБ; 39 ведомое коническое зубчатое колесо первой пары; 40 ведущее коническое зубчатое колесо второй пары; 41 ведомое коническое зубчатое колесо второй пары; 42 жесткое цилиндрическое корпусное зубчатое колесо волнового или циклоидного механизма; 43 генератор механических колебаний одноволновой эксцентриковой подшипниковой пары; 44 гибкое зубчатое звено волнового (или плавающее жесткое зубчатое звено циклоидного) механизма с шлицевой посадкой на колесную ось СВБ; 45 ступица колесной оси с зубчатым венцом шлицевой пары; 46 вал отбора мощности.
Фиг.5 колесный электромеханической тягач с двумя ведущими силовыми блоками и автономным источником электроснабжения:
13 рулевой колесный агрегат (РКА); 12 электродвигательное устройство модуль-привода РКА; 5 силовой кабель; 9 аппаратура автоматического пуска и защиты электрического модуль-привода РКА; 7 пульт дистанционного управления автономным источником электроэнергии и двумя модуль-приводами; 28 кабина машиниста-оператора; 29 аппаратура автоматического пуска и защиты электрического модуль-привода двухколесного агрегата (ДКА); 30 кабель системы электроснабжения; 31 электрический модуль-привод ДКА; 33 - устройство крепления навесных орудий и машин с унифицированными присоединительными размерами; 32 двухколесный агрегат; 47 источники автономного электроснабжения; 36 платформа ДКА; 11, 49 устройство шарнирного соединения РКА и платформы ДКА и крепления навесных орудий и машин с унифицированными присоединительными размерами; 48 контрольные кабели системы управления блоками и источниками электроснабжения.
Фиг.6 кинематическая схема колесного электромеханического тягача с двумя ведущими блоками:
19 ходовое пневмоколесо РКА с внешним диаметром d; 12 электрический модуль-привод с двумя двигателями M1 и M2 и основными скоростными ωd и кинематическим jd параметрами; 31-45 электрический модуль-привод ДКА с одним двигателем M3 и основными скоростным ωD и кинематическим jd параметрами; 33 устройство крепления транспортируемых навесных орудий и машин; 32 ходовые пневмоколеса ДКА с внешними диаметрами D; 36 платформа ДКА; 49, 11 шарнирное соединение блока РКА и платформа ДКА и устройство крепления навесных орудий и машин.
Осуществление тягача сводится к качественному изготовлению вращательных модуль-приводов, которые выполняются из стандартных покупных универсальных электродвигателей или двигателей переменного либо постоянного тока и специального передаточного устройства, включающего в себя ряд стандартных деталей и деталей волновых или циклоидных зубчатых механизмов. Конструирование, проектирование и технология изготовления таких механизмов и передач достаточно полно разработаны, например см. Гинзбург Е.Г. Волновые зубчатые передачи. Л. Машиностроение, 1969, 160 с. ил; Волновые зубчатые передачи// Под ред. Д.П. Волкова и А.Ф. Крайнева. -Киев: Техника, 1976, 222 с. ил; Воробьев А.В. Механизм манипулятора //Вестник машиностроения. 1986. N 7. с. 6-9 и Геометро-кинематические характеристики манипулятора-перекладчика. 1989. N 7. с.8-10. Вопросы расчета модуль-привод в целом и их изготовление, а также монтаж на колесных агрегатах тягача не вызовет осложнений: диаметры пневмоколес и передаточные числа передаточных устройств модуль-приводов тягача по п.3 подбираются так, как указано в пп. 8 и 9 формулы изобретения, а согласования этих параметров для пп.1 и 2 формулы вообще не требуется.
Осуществление изобретения возможно в небольшой мастерской, если приобретены материалы, покупные изделия и передаточные устройства, а также имеются токарные, фрезерные и сверлильные металлообрабатывающие станки и сварочное оборудование.
Электромонтаж систем электроснабжения, управления и защиты тягача, наладка их, опробование и сдача тягача в эксплуатацию выполнит бригада электрослесарей под руководством техника.
Изготовление изобретения различных модификаций возможно наладить, если все узлы и агрегаты изготавливать в виде модулей и блоков также на специализированных предприятиях, а монтаж выполнять силами потребителя на местах использования колесного тягача.
Колесный электромеханический тягач осуществляется монтажом ходовых колес, модуль-приводов и платформы с задней осью и передним шарниром в единое целое совместно с рулевыми рычагами и системой электроснабжения. Система управления устанавливается и налаживается после завершения монтажа основного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫТОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИЗМЕЛЬЧИТЕЛЬ ЗЕРНА И БЫТОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ИЗМЕЛЬЧИТЕЛЬ ЗЕРНА | 1992 |
|
RU2065767C1 |
| Малогабаритное модульное транспортное средство | 2016 |
|
RU2657829C2 |
| ПРИВОДИМАЯ ХОДОВАЯ ЧАСТЬ С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2347707C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАШИННЫЙ АГРЕГАТ | 2017 |
|
RU2749615C2 |
| КОЛЕСНЫЙ ТРАКТОР | 2004 |
|
RU2303546C2 |
| Многоосное длиннобазное шасси | 2020 |
|
RU2743769C1 |
| Трактор колесный сельскохозяйственный с электромеханической трансмиссией | 2022 |
|
RU2814696C1 |
| Мини-трактор "СТАВРОПОЛЕЦ" | 2024 |
|
RU2834933C1 |
| ОДНООСНЫЙ ТЯГАЧ | 1993 |
|
RU2053152C1 |
| МОСТОВОЙ АГРЕГАТ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1991 |
|
RU2040870C1 |

Использование: техника малой механизации работ в условиях фермерских и приусадебных хозяйств, строительных площадок, цеховых и складских помещений. Сущность изобретения: тягач реализован с ведущим рулевым блоком, либо с одним рулевым ведомым и одним ведущим блоками, либо с двумя ведущими блоками, один из которых является рулевым. Тягач содержит пневмоколесные агрегаты, вращательные электрические модуль-приводы с редукторными передаточными узлами в виде волновых или циклоидных зубчатых механизмов. Имеются рулевые рычаги, предусмотрены места крепления навесных и транспортируемых рабочих орудий и машин, а также средства для отбора мощности на стоянке и при резкопеременной нагрузке. Система управления электрических модуль-приводов представлена в виде средств последовательно-параллельного, совместного и раздельного управления пуском и остановом и электрозащиты, а также может включать в себя специализированные микропроцессоры. 3 с. и 13 з.п.ф-лы, 6 ил.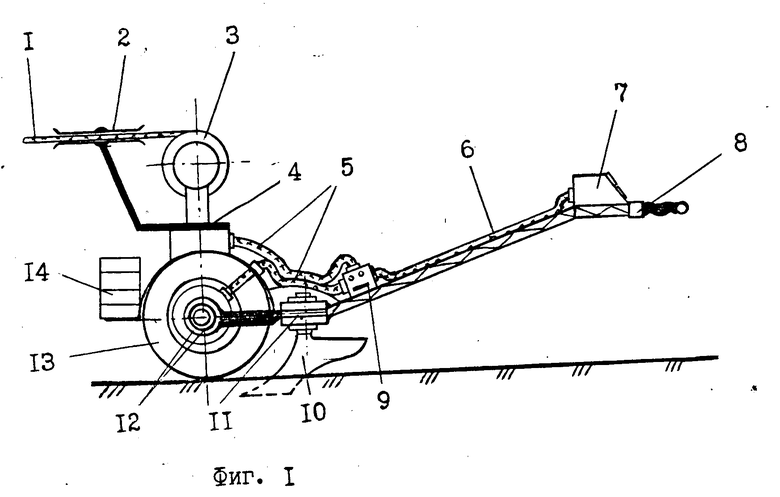
| SU, авторское свидетельство, 371115, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| SU, авторское свидетельство, 97794, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE, заявка, 3327831, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
