Изобретение относится к области контрольно-измерительной техники и может быть использовано для определения координат подвижных объектов в пределах рабочей зоны.
Известен способ определения координат подвижных объектов [а.с. СССР N 299796, кл. G 01 N 29/04, 1970] заключающийся в том, что в направлении объекта излучают ультразвуковые колебания, принимают отраженные сигналы, измеряют время между моментами излучения и приема колебаний.
Недостатком данного способа является то, что вследствие импульсного режима работы системы возникает значительная погрешность в определении координат, обусловленная движением объекта, т.к. во избежание наложения в пределах рабочей зоны излученного ультразвукового импульса и излучаемого впоследствии электромагнитного импульса период следования импульсов должен быть больше отношения максимального измеряемого расстояния к скорости ультразвука в воздухе, что приводит к повышенной временной дискретности пересчета координат.
Также известна система, в которой описан способ определения координат цехового робота [Системы очувствления и адаптивные промышленные роботы. Под ред. Е.П. Попова, В.В. Клюева, стр. 63] основанный на измерении разности расстояний от автономного излучателя, установленного на роботе, до четырех ближайших приемников, размещенных в помещении цеха, с последующим расчетом координат, режим работы этой системы импульсный.
Недостатком данного способа является большая погрешность, обусловленная импульсным режимом работы.
Наиболее близким к изобретению техническим решением является навигационное устройство [патент Великобритании N 1566616, кл. G 01 S 5/00, 08.05.80] в котором описан способ определения координат подвижного объекта, заключающийся в том, что из двух точек, разнесенных на известное расстояние по базовой линии, в направлении объекта излучают взаимно различимые акустические ультразвуковые сигналы, также излучают электромагнитный сигнал, принимают эти сигналы на объекте, прием ультразвуковых сигналов синхронизируется относительно приема электромагнитного сигнала, в результате синхронизации определяют три значения расстояний, по которым рассчитывают координаты объекта.
Недостаток этого способа большая погрешность в определении координат, особенно при движении объекта.
В связи с этим задачей, на решение которой направлено изобретение, является создание нового способа определения координат подвижных объектов, обеспечивающего высокую точность без использования дорогостоящих технологий.
Техническим результатом, который может быть получен при осуществлении данного изобретения, является повышение точности определения координат подвижных объектов.
Технический результат достигается тем, что в способе определения местоположения подвижных объектов, заключающемся в том, что из двух точек, разнесенных на известное расстояние, в сторону объекта излучают взаимно различимые акустические сигналы и электромагнитный сигнал, принимают эти сигналы на объекте, определяют расстояния от известных точек до объекта, по которым рассчитывают координаты объекта, в качестве излучаемых сигналов используют гармонический сигнал, амплитудно-модулированный набором гармонических низкочастотных колебаний, а расстояния от известных точек до объекта рассчитывают по сдвигу фаз между соответствующими гармоническими составляющими излучаемых сигналов, причем по самой низкочастотной (НЧ) составляющей модулирующего набора частот находят приближенное расстояние до объекта, а по более высокочастотным составляющим определяют уточняющие поправки.
Отличием предлагаемого способа является использование ранее не применяемого в данной области техники вида излучаемой функции, которая представляет собой гармонический сигнал, амплитудно-модулированный набором связанных по частоте гармонических низкочастотных (НЧ) колебаний, что дает возможность непрерывного измерения координат подвижного объекта. Наличие набора модулирующих колебаний позволяет определить расстояние до объекта в виде суммы поразрядных уточняющих поправок, чем достигается требуемая точность в данном диапазоне измерений просто за счет изменения числа модулирующих колебаний и задания частоты самой высокочастотной (ВЧ) составляющей модулирующего набора.
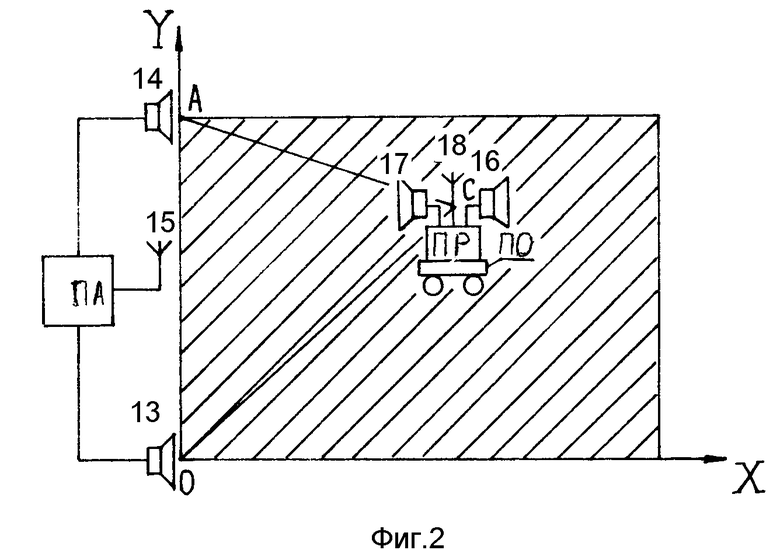
Значение самой НЧ-составляющей модулирующего набора f3 (фиг.3) определяется исходя из размеров рабочей зоны таким образом, чтобы длина волны самой НЧ-составляющей была несколько больше максимального расстояния от одной из точек излучения до подвижного объекта, находящегося в произвольной точке рабочей зоны. Частоты более ВЧ-составляющих модулирующего набора конкретно определяются погрешностью фазового дискриминатора и основанием принятой системы счисления. Так, для десятичной системы счисления частоты отличаются примерно на порядок: f1=10f2=100f3.
Необходимое количество составляющих модулирующего набора определяется требуемой точностью определения координат и погрешностью измерительной системы. При этом должно выполняться неравенство
где a заданная абсолютная погрешность, м;
δ погрешность фазового дискриминатора, град.
fn частота самой составляющей модулирующего набора, Гц;
v скорость распространения ультразвука в воздухе (v=343 м/с).
Предельные значения размеров рабочей зоны ограничены из-за поглощения ультразвуковых волн и практически не превышают 1000 м.
Несущие частоты f01 и f02 (фиг.3) выбираются из условия оптимального распространения волн и отстройки от промышленных помех. Для надежной работы системы f01 и f02 должны отстоять друг от друга не менее чем на 2 кГц.
Временная дискретность пересчета координат, в предлагаемой системе зависящая от работы электронно-вычислительной машины (ЭВМ) и аналого-цифровых преобразователей (АЦП), обуславливает погрешность определения координат при движении объектов. Эта зависимость определяется следующей формулой:
adv = τ•Vp (2)
где adv абсолютная погрешность, обусловленная движением объекта, м;
τ временная дискретность пересчета координат, с;
Vp скорость объекта, м/с.
Проведенный заявителем анализ техники, включающий поиск по патентным и научным источникам информации, и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволили установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявляемого изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявляемого изобретения требованию изобретательского уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение технического результата.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень" по действующему законодательству.
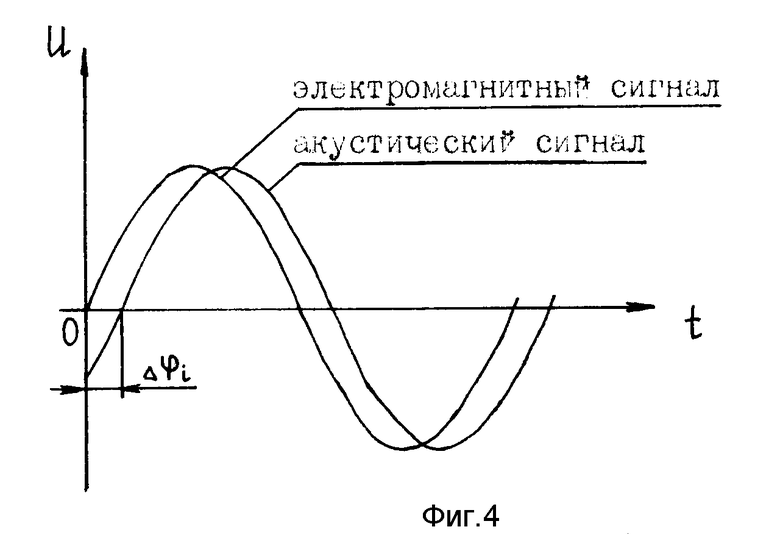
Сущность изобретения поясняется чертежами, где на фиг.1 показана функциональная блок-схема устройства, выполняющего последовательность операций по предлагаемому способу; на фиг.2 схема реализации предложенного способа; на фиг.3 диаграмма излучаемого сигнала; на фиг.4 диаграмма сигналов одной частоты, поступающих на один из фазовых дискриминаторов.
Устройство для осуществления предлагаемого способа (фиг.1) содержит передающую аппаратуру, состоящую из генераторов гармонических сигналов 1, 2, 3, 4, 5, амплитудных модуляторов 6, 7, 8, 9, усилителей мощности 10, 11, 12, ультразвуковых акустических излучателей 13, 14 для преобразования электрических сигналов в акустические волны, излучающей антенны 15 для преобразования электрических сигналов в электромагнитные волны, приемную аппаратуру, установленную на подвижном объекте и включающую ультразвуковые приемные преобразователи 16, 17, преобразующие акустические волны в электрические сигналы, приемную антенну 18 для преобразования электромагнитных волн в электрические сигналы, усилители 19, 20, 21, усиливающие электрические сигналы до необходимого уровня, узкополосные фильтры 22, 23, 24, 25, выделяющие полезные сигналы и ослабляющие амплитуду помех, генераторы гармонических колебаний 26 30 и демодуляторы 31 46, необходимые для демодуляции и выделения НЧ-составляющих сложного амплитудно-модулированного сигнала, фазовые дискриминаторы (ФД) 47 52, определяющие фазовый сдвиг между соответствующими составляющими электромагнитного и ультразвукового сигналов, АЦП 53 58, преобразующие аналоговые значения фазовых сдвигов в цифровой код, необходимый для работы микроЭВМ 59, которая в свою очередь осуществляет поразрядное сложение числовых значений с выходов АЦП и расчет координат объекта, микроЭВМ 59 также осуществляет сравнение пересекающихся разрядов на выходах АЦП и в случае их несовпадения выдает сигнал об ошибке.
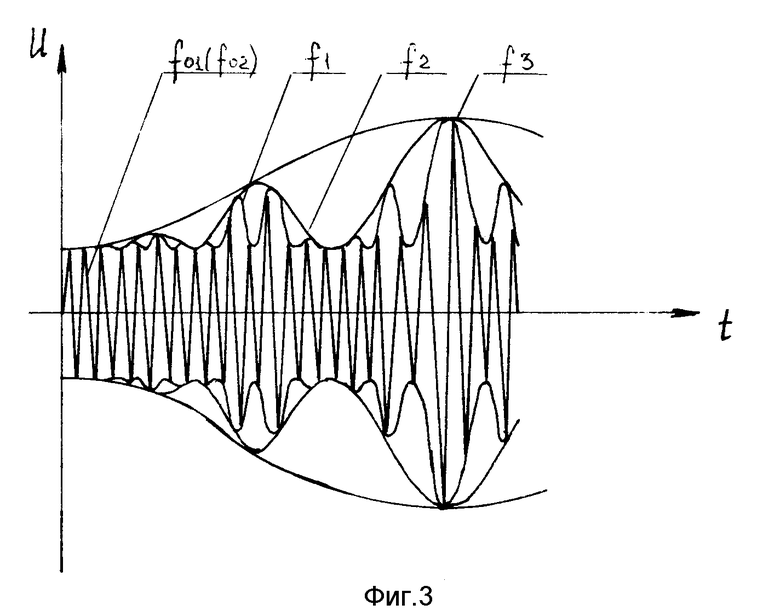
На фиг. 2 предложена схема заявляемого способа. Способ осуществляется следующим образом. Передающая аппаратура (ПА) вырабатывает гармонические сигналы с несущими частотами f01 и f02 соответственно в точках A и O, амплитудно-модулированные набором гармонических колебаний с частотами f1, f2, f3 (фиг. 3). Эти сигналы преобразуются ультразвуковыми излучателями 13 и 14 в акустические волны, а излучающей антенной 15 в электромагнитные волны.
В пределах рабочей зоны (заштрихованная область) в точке C находится подвижный объект (ПО), на котором установлена приемная аппаратура (ПР), включающая приемные преобразователи 16, 17 и приемную антенну 18, которые преобразуют акустические и электромагнитные волны в электрические сигналы. Далее эти сигналы усиливаются, фильтруются по несущим частотам f01 и f02 и демодулируются четыре раза по частотам f01 (f02), f1, f2 и f3. Выделенные составляющие одной частоты подаются в ФД 47 52 (фиг.1). Определяемый фазовый сдвиг между соответствующими составляющими электромагнитного и акустического сигналов (фиг. 4) будет пропорционален расстоянию от точки излучения до объекта, поскольку скорость распространения электромагнитных волн несравнимо больше скорости распространения акустических волн.
Аналоговый выходной сигнал с ФД преобразуется в цифровой код с помощью АЦП. Далее эта информация поступает в микроЭВМ, которая осуществляет расчет частичных составляющих расстояний по формуле
где Li частичное расстояние от известной точки до объекта, м;
ΔΦi фазовый сдвиг i-ых составляющих, град.
fi частота i-ой составляющей, Гц;
v скорость распространения ультразвука в воздухе, м/с.
Затем микроЭВМ осуществляет поразрядное сложение частичных составляющих расстояний, не допуская сложения пересекающихся разрядов, которые микроЭВМ сравнивает таким образом, чтобы пересекающиеся разряды соседних частичных составляющих были равны, в противном случае вырабатывается сигнал об ошибке.
Отметим, что старший разряд измеряемых расстояний AC и OC определяется значением самой НЧ-составляющей f3 (фиг. 3) модулирующего набора, а младший разряд и соответственно точность определяется значением самой ВЧ-составляющей f1 (фиг. 3).
Далее микроЭВМ определяет проекции найденных расстояний на плоскость пола по формулам
где AC0 и OC0 найденные расстояния от излучателей до объекта, м;
H высота подвеса излучателей относительно пола, м;
h высота расположения приемных акустических преобразователей относительно пола, м.
По найденным расстояниям AC и OC и известному расстоянию AO находят координаты объекта в прямоугольной системе координат XOY (см. фиг. 2) по известным зависимостям:
X 2 (S/AO), (6)
где X координата подвижного объекта по оси X, расположенного в точке C, м;
S площадь треугольника, образованного отрезками AO, AC, OC (см. фиг.2), м2,  формула Герона для площади треугольника AOC, где p полупериметр треугольника AOC, м, p (AO+OC+OA)/2,
формула Герона для площади треугольника AOC, где p полупериметр треугольника AOC, м, p (AO+OC+OA)/2,
где Y координата подвижного объекта по оси Y, расположенного в точке C, м.
Применение данного способа рассматривалось на примере определения координат транспортного робота-погрузчика в складском помещении с размерами рабочей зоны 860х750 м и высотой потолка 16 м.
Для надежной работы устройства, осуществляющего заявляемый способ, необходимо соблюсти ряд условий.
В частности, необходимо, чтобы между излучающими и приемными элементами устройства была прямая видимость. В этих целях используют помещения с незначительным количеством крупногабаритных конструкций в верхней части, излучающие элементы закрепляются под потолком, а приемные элементы, установленные на подвижном объекте, размещают на вертикальной мачте высотой до 2,5 м. Эта мачта при соблюдении радиотехнических правил может быть использована в качестве приемной антенны.
Высота подвеса излучателей 14 м, приемные преобразователи расположены на высоте 3 м от пола. Расстояние между излучателями 870 м.
Для данного складского помещения берутся модулирующие частоты: 0,3, 3 и 30 Гц и несущие частоты f01 и f02 соответственно 50 и 52 кГц. Абсолютная погрешность системы с этими параметрами около 5 см.
Следует отметить, что при расчете координат робот рассматривается как материальная точка. При недостаточности такого рассмотрения следует учитывать габариты работа. При этом необходимо ввести дополнительный приемный тракт на объекте, что позволит определять ориентацию робота. При этом система несколько подорожает. Таким образом, заявляемый способ в каждом отдельном случае позволяет проектировать устройство, позволяющее достигать компромисс между стоимостью устройства и его качественными и функциональными характеристиками.
Приведем пример расчета координат робота. Допустим, что фазовые сдвиги Δφ1, Δφ2, Δφ3 по каждой из частот расстояния AC составили соответственно 86,3, 165,3 и 174,4 градусов. Этому соответствуют линейные частичные расстояния 2,74, 52,5 и 554 м, рассчитанные по формуле (1). Тогда полное расстояние от точки излучения A до объекта определится как поразрядная сумма частичных расстояний с отбрасыванием незначащих цифр у более НЧ составляющих. В суммировании участвуют только выделенные знаком ≈ разряды, остальные разряды нужны для оценки "правдоподобности" полученных результатов: .
.
В такой же последовательности определяется расстояние OC, равное 432,56 м.
После этого микроЭВМ рассчитывает проекции этих расстояний на плоскость пола по формулам (4) и (5):
Затем рассчитывают площадь треугольника AOC по формуле Герона:
где p (552,63+432,42+870)/2=927,525 м.
Затем по формуле (6) находят абсциссу объекта, а по формуле (7) - ординату:
X=2(99516,388/870)=228,77 м;
При скорости движения робота до 10 м/с погрешность, вызванная перемещением объекта, не превышает 1 см.
Достоинством изобретения помимо повышенной точности определения координат является увеличение помехозащищенности за счет относительно узкой рабочей полосы частот по сравнению с прототипом и за счет линейчатого характера спектра излучаемых частот.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
средство, воплощающее заявленное изобретение, при его использовании и осуществлении предназначено для использования в контрольно-измерительной технике для определения координат подвижных объектов в пределах рабочей зоны,
для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью средств и методов, описанных в заявке,
средство, воплощающее заявленное изобретение, при его осуществлении способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛОКАЛЬНЫХ ЭФФЕКТИВНЫХ ПОВЕРХНОСТЕЙ РАССЕЯНИЯ ОБЪЕКТОВ В СВЕРХШИРОКОЙ ПОЛОСЕ ЧАСТОТ | 2007 |
|
RU2360264C1 |
| СПОСОБ ПЕРЕДАЧИ УПРУГОЙ ВОЛНЫ В МОРСКОЙ ВОДЕ (ВАРИАНТЫ) | 1998 |
|
RU2167454C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2154286C1 |
| СПОСОБ ПРИЕМА УПРУГОЙ ВОЛНЫ В МОРСКОЙ ВОДЕ (ВАРИАНТЫ) | 1998 |
|
RU2158029C2 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| Электроакустическое устройство для определения координат облучателя радиотелескопа | 1991 |
|
SU1795394A1 |
| ДВУХДИАПАЗОННАЯ ПЕЧАТНАЯ ДИПОЛЬНАЯ АНТЕННА | 2010 |
|
RU2432646C1 |
| СПОСОБ ПРОГНОЗА МЕСТОПОЛОЖЕНИЯ И ИНТЕНСИВНОСТИ ЗЕМЛЕТРЯСЕНИЯ | 1998 |
|
RU2147756C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
Изобретение относится к области контрольно-измерительной техники и может быть использовано для определения координат подвижных объектов в пределах рабочей зоны. Техническим результатом, который может быть получен при осуществлении данного изобретения, является повышение точности определения координат подвижных объектов. Технический результат достигается тем, что в способе определения местоположения подвижных объектов, заключающемся в том, что из двух точек, разнесенных на известное расстояние, в сторону объектов излучают взаимно различимые акустические сигналы и электромагнитный сигнал, принимают эти сигналы на объекте, определяют расстояния от известных точек до объекта, по которым рассчитывают координаты объекта, в качестве излучаемых сигналов используют гармонический сигнал, амплитудно-модулированный набором гармонических низкочастотных колебаний, а расстояния от известных точек до объекта рассчитывают по сдвигу фаз между соответствующими гармоническими составляющими излучаемых сигналов, причем самой низкочастотной составляющей модулирующего набора частот находят приближенное расстояние до объекта, а по более высокочастотным составляющим определяют уточняющие поправки. 4 ил.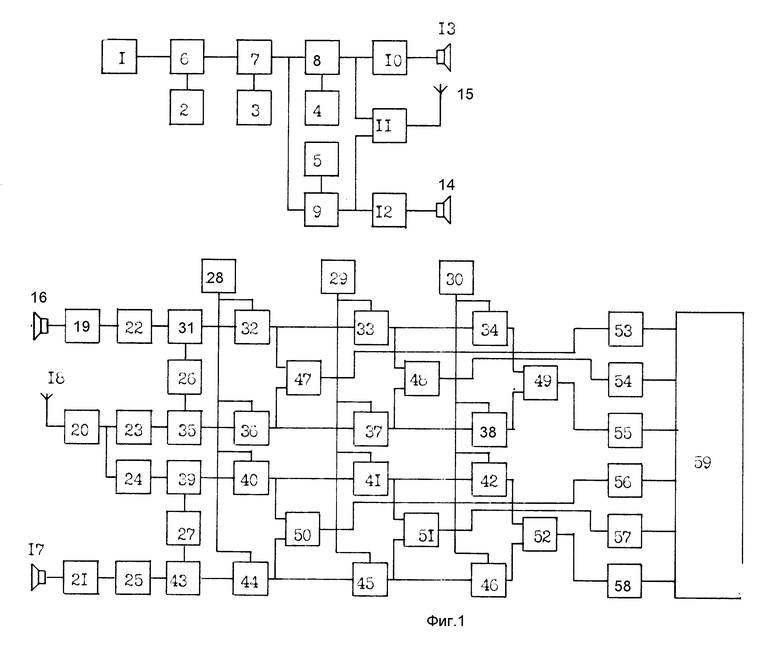
Способ определения координат подвижных объектов, заключающийся в том, что из двух точек, разнесенных на известное расстояние, в сторону объекта излучают взаимно различимые акустические сигналы и электромагнитный сигнал, принимают эти сигналы на объекте, определяют расстояния от известных точек до объекта, по которым рассчитывают координаты объекта, отличающийся тем, что в качестве излучаемых сигналов используют гармонический сигнал, амплитудно-модулированный набором гармонических низкочастотных колебаний, а расстояния от известных точек до объекта рассчитывают по сдвигу фаз между соответствующими гармоническими составляющими излучаемых сигналов, причем по самой низкочастотной составляющей модулирующего набора частот находят приближенное расстояние до объекта, а по более высокочастотным составляющим определяют уточняющие поправки.
| GB, патент, 1566616, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
