Изобретение относится к средствам механизации чертежно-графических работ, а именно к устройствам для вычерчивания параллельных линий под любым углом.
Известен механизм параллельного перемещения линейки, содержащей шесть роликов, закрепленных в углах чертежной доски и охваченных замкнутым гибким элементом, образующим две пары параллельных ветвей, расположенных вдоль вертикальных сторон чертежной доски, и пару пересекающихся между собой ветвей, распложенных вдоль одной из горизонтальных сторон ее, а к двум вертикальным ветвям гибкого элемента прикреплена своими концами горизонтально расположенная линейка [1]
Недостатком данного механизма является недолговечность гибкого элемента, так как пересекающиеся ветви его перетираются.
Известен механизм для прямолинейно-поступательного перемещения линейки, содержащий чертежную доску, четыре ролика, закрепленных в углах ее, замкнутый гибкий элемент, охватывающий ролики и образующий четыре вертикальные и две горизонтальные ветви, расположенные вдоль сторон чертежной доски, линейку, горизонтально расположенную на чертежной доске и прикрепленную своими концами к двум вертикальным ветвям гибкого элемента, и противовес линейки, закрепленный на гибком элементе [2]
Недостатком данного механизма является некоторая громоздкость, из-за охвата двух роликов спаренными ветвями гибкого элемента, что ограничивает возможность использования его.
Наиболее близким аналогом изобретения является механизм для прямолинейно-поступательного перемещения линейки, содержащей чертежную доску, ролики, установленные по два в углах ее верхней части и по одному в углах нижней части, замкнутый гибкий элемент, охватывающий ролики с образованием вертикальных и горизонтальных ветвей, расположенных параллельно краям доски, и рейсшину [3]
Техническим результатом изобретения является расширение возможности использования.
Это достигается тем, что механизм для прямолинейно-поступательного перемещения линейки снабжен дополнительным замкнутым гибким элементом, который охватывает два верхних ролика с образованием горизонтальных ветвей, при этом средние ветви гибких элементов связаны между собой, рейсшина расположена вертикально и ее концы закреплены на крайних горизонтальных ветвях гибких элементов, причем рейсшина имеет каретку с чертежной линейкой, направляющий желоб для нее и средство для перемещения линейки вдоль рейсшины, включающее ролики, установленные попарно на концах рейсшины и два замкнутых гибких элемента, охватывающих ролики с образованием вертикальных ветвей, при этом одна ветвь каждого гибкого элемента расположена в желобе и связана с другой посредством противовеса, а другие ветви расположены снаружи и на них закреплена каретка чертежной линейки.
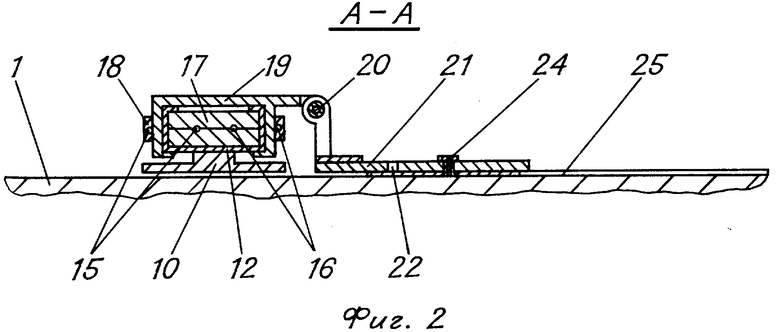
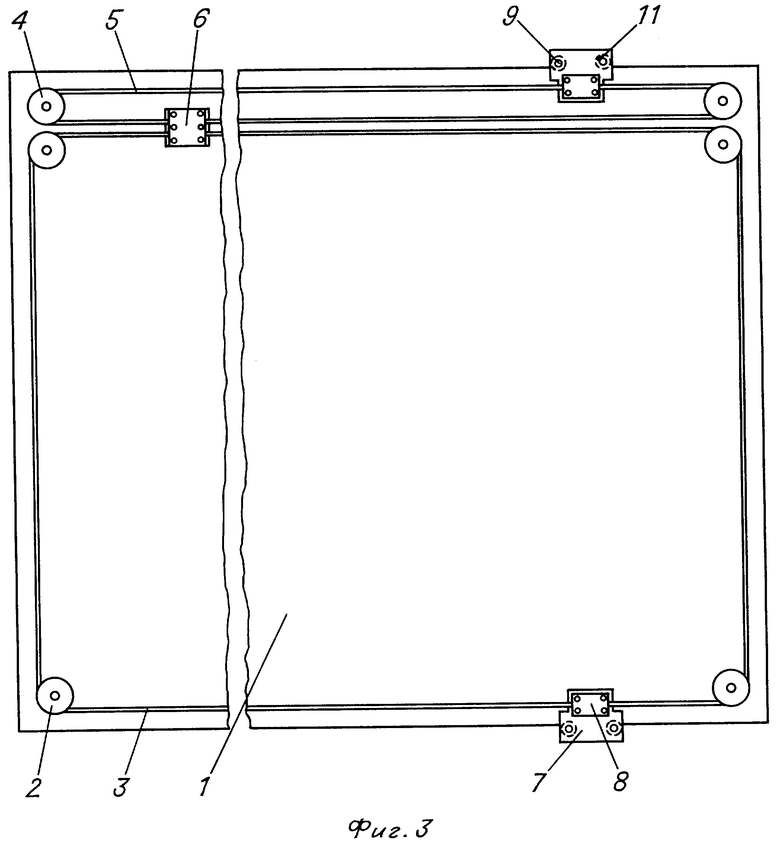
На фиг. 1 изображен механизм, вид спереди; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 механизм, вид сзади.
Механизм для прямолинейно-поступательного перемещения линейки содержит чертежную доску 1, в углах которой на тыльной стороне установлены ролики 2, охваченные замкнутым гибким элементом 3, образующим две вертикальные и две горизонтальные ветви, параллельные краям чертежной доски 1, и ролики 4, охваченные замкнутым гибким элементом 5, образующим две горизонтальные ветви. Средние горизонтальные ветви гибких элементов 3 и 5 связаны между собой посредством зажима 6, а к крайним горизонтальным ветвям гибких элементов 3 и 5 посредством кронштейнов 7, зажимов 8 и болтов 9 прикреплена вертикально установленная на рабочей стороне чертежной доски 1 линейка 10, выполненная, например, из пластмассы. На болтах 9, связывающих линейку 10 с кронштейнами 7, установлены ролики 11, которые, охватывая своими канавками горизонтальные торцы чертежной доски 1, обеспечивают плавность перемещения линейки 10 и расположение ее над рабочей поверхностью чертежной доски 1 примерно на высоте 5 мм. Линейка 10 снабжена направляющим желобом 12, выполненным, например, из дюраля и имеющим прямоугольную форму в поперечном сечении. На концах линейки 10 установлены ролики 13 и 14, охваченные замкнутыми гибкими элементами соответственно 15 и 16, каждый из которых образует две вертикальные ветви, причем одни ветви гибких элементов 15 и 16 расположены внутри желоба 12 и связаны между собой посредством противовеса 17, а другие ветви гибких элементов 15 и 16 расположены снаружи желоба 12 и к ним посредством зажимов 18 прикреплена горизонтально установленная на желобе 12 каретка 19, выполненная, например, из пластмассы. К каретке 19 посредством шарнира 20 прикреплена пластина 21, выполненная из прозрачного материала, например, из органического стекла, с дугообразной прорезью 22 и градусной шкалой 23, нанесенной на нижней стороне пластины 21 и оцифрованной в двух направлениях в прямом и обратном. С пластиной 21 посредством шарнира 24 связана чертежная линейка, выполненная из органического стекла в виде равнобедренного прямоугольного треугольника 25, на фасках которого нанесены миллиметровые шкалы 26, а на линии, совпадающей с высотой его, нанесена визирная риска 27. Через прорезь 22 в платине 21 пропущен установленный на треугольнике 25 болт 28, на который навернута фиксирующая голова 29.
Работа механизма заключается в том, что при воздействии рукой на каретку 19 в горизонтальном направлении линейка 10 будет перемещаться, сохраняя при этом вертикальное положение, так как она своими концами посредством кронштейнов 7 и зажимов 8 прикреплена к крайним горизонтальным ветвям замкнутых гибких элементов 3 и 5, которые связаны между собой зажимом 6, а следовательно, могут перемещаться на вращающихся роликах 2 и 4 только синхронно и в одинаковом направлении.
При воздействии рукой на каретку 19 в вертикальном направлении она будет перемещаться на желобе 12, сохраняя при этом горизонтальное положение, так как посредством зажимов 18 прикреплена к ветвям замкнутых гибких элементов 15 и 16, расположенных снаружи желоба 12, которые могут перемещаться на вращающихся роликах 13 и 14 только синхронно и одинаковом направлении вследствие того, что ветви гибких элементов 15 и 16, расположенные внутри желоба 12, связаны между собой посредством противовеса 17, который при этом синхронно перемещается в направлении, противоположном направлению перемещения каретки 19.
Параллельное перемещение треугольника 25 в любом направлении на чертежной доске 1 осуществляется при одновременном горизонтальном перемещении линейки 10 и вертикальном перемещении каретки 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный прибор | 1990 |
|
SU1729819A1 |
| МЕХАНИЗМ ДЛЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ЛИНЕЙКИ | 1996 |
|
RU2106258C1 |
| ЧЕРТЕЖНЫЙ ПРИБОР | 1996 |
|
RU2101191C1 |
| ЧЕРТЕЖНЫЙ СТАНОК | 1995 |
|
RU2080808C1 |
| КАДРИРУЮЩАЯ РАМКА | 1996 |
|
RU2115146C1 |
| Механизм для прямолинейно-поступательного перемещения линейки | 1990 |
|
SU1742107A1 |
| ВЕРСТАЛЬНАЯ ФОТОБУКВЕННАЯ УСТАНОВКА | 1992 |
|
RU2036110C1 |
| ВЕРСТАЛЬНАЯ ФОТОБУКВЕННАЯ УСТАНОВКА | 1996 |
|
RU2104159C1 |
| ЧЕРТЕЖНЫЙ ПРИБОР | 1995 |
|
RU2097204C1 |
| Чертежный прибор | 1990 |
|
SU1742109A1 |
Использование: для вычерчивания параллельных линий под любым углом. Сущность изобретения: ролики установлены по два в углах верхней части чертежной доски и по одному в углах ее нижней части. Один гибкий элемент охватывает два верхних ролика с образованием горизонтальных ветвей. Другой гибкий элемент охватывает остальные ролики, образуя вертикальные и горизонтальные ветви. Средние ветви гибких элементов связаны между собой. Рейсшина рсположена вертикально и ее концы закреплены на крайних горизонтальных ветвях гибких элементов. Линейка установлена на рейсшине посредством каретки, которая перемещается посредством троссоблочного механизма. 3 ил.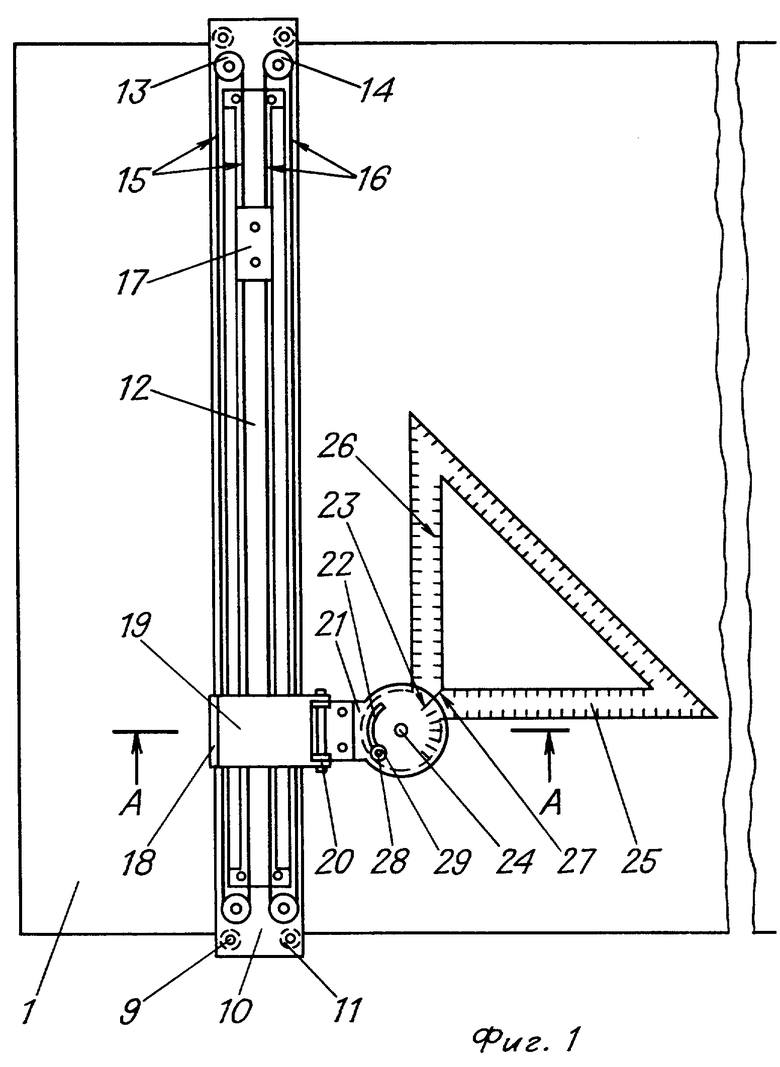
Механизм для прямолинейно-поступательного перемещения линейки, содержащий чертежную доску, ролики, установленные по два в углах ее верхней части и по одному в углах нижней части, замкнутый гибкий элемент, охватывающий ролики с образованием вертикальных и горизонтальных ветвей, расположенных параллельно краям доски, и рейсшину, отличающийся тем, что он снабжен дополнительным замкнутым гибким элементом, который охватывает два верхних ролика с образованием горизонтальных ветвей, при этом средние ветви гибких элементов связаны между собой, рейсшина расположена вертикально и ее концы закреплены на крайних горизонтальных ветвях гибких элементов, причем рейсшина имеет каретку с чертежной линейкой, направляющий желоб для нее и средство для перемещения линейки вдоль рейсшины, включающее ролики, установленные попарно на концах рейсшины, и два замкнутых гибких элемента, охватывающих ролики с образованием вертикальных ветвей, при этом одна ветвь каждого гибкого элемента расположена в желобе и связана с другой посредством противовеса, а другие ветви расположены снаружи и на них закреплена каретка чертежной линейки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ботвинников А.Д | |||
| Современные средства механизации графических работ.- М.: Высшая школа, 1963, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 710836, кл | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1742107, кл | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
