Изобретение относится к области измерительной техники, в частности к устройствам для измерения оптико-электронными средствами угловых перемещений механизмов.
Наиболее близким по технической сущности и достигаемому результату к заявляемому устройству является оптико-электронное устройство для определения параметров угловых перемещений механизмов, содержащее зеркало, основание, установленные на основании источник питания и излучатель света, соединенный с ним, регистратор, два идентичных чувствительных блока, каждый из которых включат в себя выполненный с продольной прорезью цилиндрический корпус с крышками и установленные в нем линзы и фотоприемник.
Недостатком известного оптико-электронного устройства является узкий диапазон области его применения и функциональных возможностей вследствие невозможности выдачи команд на звенья исполнительных механизмов в моменты времени, соответствующие прохождению механизмом заданных координат в плоскости изображения угловых перемещений.
Техническим результатом использования изобретения является расширение области применения, расширение функциональных возможностей.
Технический результат достигается за счет того, что известное оптико-электронное устройство для определения параметров угловых перемещений механизмов, содержащее зеркало, основание, установленные на основании источник питания и излучатель света, соединенный с ним, регистратор, два идентичных чувствительных блока, каждый из которых включает в себя выполненный с продольной прорезью цилиндрический корпус с крышками и установленные в нем линзы и фотоприемник, снабжено установленными коаксиально в цилиндрическом корпусе каждого чувствительного блока направляющим подвесом, втулкой и измерительным элементом, жестко связанным с втулкой, установленными аксиально в корпусе дополнительным фотоприемником и двумя цилиндрическими элементами, связанными с цилиндрическим корпусом, установленным на основании и подключенным к направляющим подвесам чувствительных блоков генератором, четырьмя потенциометрами, четырьмя усилителями, тремя сумматорами, двумя квадраторами, блоком извлечения квадратного корня, фильтром, ограничителем, блоком определения минимального значения ускорений, вычислителем минимального значения амплитуды угловых перемещений, блоком выделения квадранта угловых перемещений и схемой совпадения, направляющий подвес и втулка выполнены с продольными прорезями, параллельными продольной прорези цилиндрического корпуса, образуя с ней сквозное отверстие, измерительный элемент выполнен с коническими на его основаниях и из оптически прозрачного упругого материала, цилиндрические элементы из оптически прозрачного материала, вторые входы усилителей соединены с потенциометрами, выходы фотоприемников соединены с первыми входами усилителей, выходы которых соединены с входами блока выделения квадранта угловых перемещений и входами первого и второго сумматоров, выходы первого и второго сумматоров соединены с входами квадраторов, выходы которых соединены с входами третьего сумматора, выход третьего сумматора соединен с входом блока извлечения квадратного корня, выход которого последовательно соединен с фильтром, ограничителем, блоком определения минимального значения ускорений, вычислителем минимального значения амплитуды угловых перемещений и первым входом схемы совпадений, второй вход которой соединен с выходом блока выделения квадранта угловых перемещений, выход схемы совпадений соединен с выходом регистратора, чувствительные блоки установлены ортогонально друг другу, зеркало установлено на основании и выполнено полупрозрачным, крышки с центральными отверстиями, в каждом из которых установлены линза и фотоприемник, а излучатель света оптически связан с соответствующим фотоприемником через полупрозрачное зеркало, измерительный элемент, цилиндрический элемент и линзу.
На чертеже изображена схема оптико-электронного устройства для определения параметров угловых перемещений механизмов.
Оптико-электронное устройство для определения параметров угловых перемещений механизмов содержит зеркало 1, основание 2, установленные на основании 2 источник 3 питания и излучатель 4 света, соединенный с ним, регистратор 5, два идентичных чувствительных блока 6 и 7, каждый из которых включает в себя выполненный с продольной прорезью 8 цилиндрический корпус 9 с крышками 10 и 11 и установленные в нем линзы 12 и 13 и фотоприемник 14, установленные коаксиально в цилиндрическом корпусе 9 каждого чувствительного блока 6 и 7, направляющий подвес 15, втулку 16 и измерительный элемент 17, жестко связанный с втулкой 16, установленные аксиально в корпусе 9 дополнительный фотоприемник 18 и два цилиндрических элемента 19 и 20, связанные с цилиндрическим корпусом 9. Также устройство содержит установленный на основании 2 и подключенный к направляющим подвесам чувствительных блоков 6 и 7 генератор 21, четыре потенциометра 22 25, четыре усилителя 26 29, три сумматора 30 32, два квадратора 33 и 34, блок 35 извлечения квадратного корня, фильтр 36, ограничитель 37, блок 38 определения минимального значения ускорений, вычислитель 39 минимального значения амплитуды угловых перемещений, блок 40 выделения квадранта угловых перемещений и схему 41 совпадения. Направляющий подвес 15 и втулка 16 выполнены с продольными прорезями 42 и 43, параллельными продольной прорези 8 цилиндрического корпуса 9, образуя с ней сквозное отверстие, измерительный элемент 17 выполнен с коническими наконечниками на его основаниях и из оптически прозрачного упругого материала, цилиндрические элементы 19 и 20 из оптически прозрачного материала. Вторые входы усилителей 26 29 соединены с потенциометрами 22 25. Выходы фотоприемников 14 чувствительных блоков 6 и 7 соединены соответственно с первыми входами усилителей 26 и 28, а выходы фотоприемников 18 чувствительных блоков 6 и 7 соединены соответственно с первыми входами усилителей 27 и 29.
Выходы усилителей 26 29 соединены с входами блока 40 выделения квадранта угловых перемещений и входами первого 30 и второго 31 сумматоров. Выходы первого 30 и второго 31 сумматоров соединены с входами квадраторов 33 и 34, выходы которых соединены с входами третьего 32 сумматора, выход третьего 32 сумматора соединен с входом блока 35 извлечения квадратного корня, выход которого последовательно соединен с фильтром 36, ограничителем 37, блоком 38 определения минимального значения ускорений, вычислителей 39 минимального значения амплитуды угловых перемещений и первым входом схемы 41 совпадений, второй вход которой соединен с выходом блока 40 выделения квадранта угловых перемещений, выход схемы 41 совпадений соединен с входом регистратора 5.
Чувствительные блоки 6 и 7 установлены ортогонально друг другу, зеркало 1 установлено на основании 2 и выполнено полупрозрачным, крышки 10 и 11 с центральными отверстиями 44 и 45. В отверстии 44 установлены линза 12 и фотоприемник 14, а в отверстии 45 линза 13 и дополнительный фотоприемник 18. Излучатель 4 света оптически связан с соответствующим фотоприемником через полупрозрачное зеркало, измерительный элемент, цилиндрический элемент и линзу. Питание электрических цепей, входящих в оптико-электронное устройство, осуществляется от источников питания 3 ( на чертеже не показано). Продольная ось механизма перпендикулярна основанию 2.
Оптико-электронное устройство для определения параметров угловых перемещений механизмов работает следующим образом.
Световое излучение от излучателя 4 света с помощью полупрозрачного зеркала 1 попадает через продольные прорези 8, 42, 43 на измерительный элемент 17 чувствительного блока 6 и чувствительного блока 7. Излучение, проходя через цилиндрические элементы 19 и 20, выполненные из оптически прозрачного материала, попадает на фотоприемники 14 и 18, вызывая фоновую засветку и появление фонового тока. При отсутствии пространственных угловых перемещений, приводящих к появлению ускорений, потенциометры 22 25 установлены таким образом, чтобы выходной сигнал на сумматоре 30 и 31 был равен нулю. В процессе угловых перемещений и возникающих при этом ускорений измерительный элемент 17 смещается в направлении одного из цилиндрических элементов 19 или 20 и деформируется, что приводит к увеличению пятна контакта. Световое излучение проходит через пятно контакта, что приводит к увеличению измеряемого сигнала на выходе фотоприемника 14 или 18, который поступает на вход дифференциального усилителя 26 или 27, с выхода которого сигнал поступает на сумматор 30. Уменьшение величины действующего ускорения вызывает соответствующее уменьшение деформации измерительного элемента 17 и уменьшение пятна контакта.
При этом величина сигнала на выходе соответствующего фотоприемника уменьшается. Появление ортогональной составляющей ускорения вследствие пространственных угловых перемещений механизма (имеющих периодический характер) приводит к тому, что аналогичные процессы протекают во втором чувствительном блоке 7, что приводит к появлению информационного сигнала на выходах дифференциальных усилителей 28 и 29, и, как следствие, на выходе второго сумматора 31.
Информационные сигналы с чувствительных блоков 6 и 7 соответствуют ортогональным составляющим ускорений, возникающих вследствие пространственных угловых перемещений механизма. Сигналы сумматоров 30 и 31 поступают на выходы квадраторов 33 и 34, с выхода которых они поступают на входы третьего сумматора 32. С выхода третьего сумматора 32 сигналы поступают на вход блока 35 извлечения квадратного корня, вследствие чего на входе фильтра 36 имеет место сигнал, пропорциональный главному вектору радиального ускорения. После фильтра 36 и ограничителя 37 амплитуды сигнала он поступает на блок 38 определения минимального значения ускорений. Вычислитель 39 ставит в соответствие значению минимального радиального ускорения минимальное значение амплитуды пространственных угловых перемещений механизма. Сигнал, соответствующий минимальному значению амплитуды пространственных угловых перемещений, поступает на первый вход схемы совпадений 41. На второй вход схемы 41 поступает сигнал с блока 40 выделения заданного (программой выполнения последовательности технологических операций) квадранта угловых перемещений. При прохождении механизмом минимального значения амплитуды угловых перемещений и заданного квадранта углового перемещения (что соответствует указанному в программе квадранту) сигнал с выхода схемы 41 совпадений поступает на вход регистратора 5 для выполнения необходимой функции, поставленной перед узлом механизма, несущем на себе весь измерительный тракт в целом.
При поступлении сигнала с электрического генератора 21 ультразвуковой частоты на поверхности направляющего подвеса 15 возникают узлы и пучности, что приводит к снижению коэффициента трения и позволяет измерять малые значения ускорений, а следовательно, и соответствующие им угловые перемещения механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ МЕХАНИЗМА | 1996 |
|
RU2095754C1 |
| ОПТОВОЛОКОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2168743C1 |
| ИЗМЕРИТЕЛЬ ДЫМНОСТИ ТЕПЛОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 2001 |
|
RU2189029C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2178898C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕРАВНОМЕРНОСТИ СПЕКТРА ЭКСТИНКЦИИ ПОТОКА ИЗЛУЧЕНИЯ | 1992 |
|
RU2024846C1 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1999 |
|
RU2156478C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1995 |
|
RU2101742C1 |
Изобретение относится к измерительной технике, в частности к средствам измерения параметров угловых перемещений узлов механизмов оптико-электронными средствами. Техническим результатом использования изобретения является расширение области применения и расширение функциональных возможностей. Результат достигается за счет того, что регистрируется главный вектор радиальной составляющей ускорений, возникающих в процессе совершения механизмом пространственных угловых перемещений, и проводится многоканальная обработка совокупности информационных сигналов. Сигнал на регистратор 5 поступает при достижении амплитудой угловых перемещений минимального значения и соответствии фазы угловых перемещений механизма заданному квадранту. В качестве средств измерения используются два чувствительных блока 6 и 7, позволяющие осуществить оптическую связь источника 4 света с соответствующими фотоприемниками 14(18) через полупрозрачное зеркало 1, измерительный элемент 17, цилиндрический элемент 19(20) и линзу 12(13). 1 ил.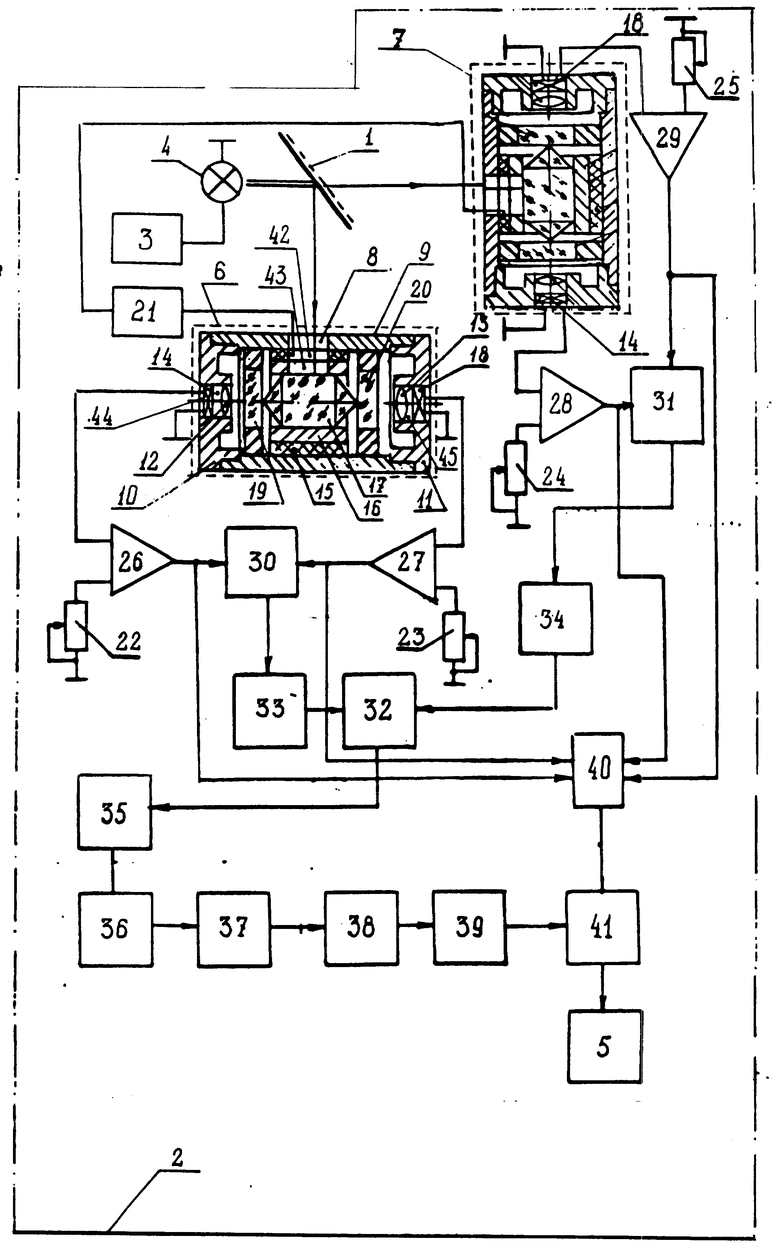
Оптико-электронное устройство для определения параметров угловых перемещений механизмов, содержащее зеркало, платформу, установленные на платформе источник питания и излучатель света, соединенный с ним, регистратор, два идентичных чувствительных блока, каждый из которых включает в себя выполненный с продольной прорезью цилиндрический корпус, основаниями которого являются крышки, и установленные в нем линзы и фотоприемник, отличающееся тем, что оно снабжено установленным коаксиально в цилиндрическом корпусе каждого чувствительного блока направляющим подвесом, втулкой и измерительным элементом, жестко связанным с втулкой, дополнительным фотоприемником и двумя цилиндрическими элементами, установленным на платформе и подключенным к направляющим подвесам чувствительных блоков генератором, четырьмя потенциометрами, четырьмя усилителями, тремя сумматорами, двумя квадраторами, блоком извлечения квадратного корня, фильтром, ограничителем, блоком определения минимального значения ускорений, вычислителем минимального значения амплитуды угловых перемещений, блоком выделения квадранта угловых перемещений и схемой совпадения, крышки цилиндрических корпусов чувствительных блоков, установленных ортогонально друг другу, выполнены с центральными отверстиями, в каждом из которых установлены соответствующие линза и фотоприемник, направляющий подвес и втулка выполнены с продольными прорезями, параллельными продольной прорези цилиндрического корпуса, образуя с ней сквозное отверстие, измерительный элемент выполнен с коническими наконечниками на его основаниях и из оптически прозрачного упругого материала, цилиндрические элементы выполнены из оптически прозрачного материала и установлены в корпусе аксиально измерительному элементу между ним и соответствующей линзой в крышке, зеркало установлено на платформе и выполнено полупрозрачным, излучатель света оптически связан с соответствующим фотоприемником в крышке корпуса чувствительного блока через полупрозрачное зеркало, измерительный элемент, цилиндрический элемент и линзу, вторые входы усилителей соединены с потенциометрами, выходы фотоприемников соединены с первыми входами усилителей, выходы которых соединены с входами блока выделения квадранта угловых перемещений и входами первого и второго сумматоров, выходы первого и второго сумматоров соединены с входами квадраторов, выходы которых соединены с входами третьего сумматора, выход третьего сумматора соединен с входом блока извлечения квадратного корня, выход которого последовательно соединен с фильтром, ограничителем, блоком определения минимального значения ускорений, вычислителем минимального значения амплитуды угловых перемещений и первым входом схемы совпадений, второй вход которой соединен с выходом блока выделения квадранта угловых перемещений, выход схемы сопадений соединен с входом регистратора.
| Патент США N 5258822, кл.G 01B 11/26, 1993. |
