Изобретение относится к измерительной технике и может быть использовано для быстродействия прецизионного преобразования аналоговых сигналов, изменяющихся в широком динамическом диапазоне.
Одной из основных проблем при решении задачи аналого-цифрового преобразования сигналов является обеспечение высокого быстродействия при работе в динамическом диапазоне.
Известны способы аналого-цифрового преобразования, в той или иной степени расширяющие динамический диапазон преобразования без снижения быстродействия, в частности, путем разделения преобразования аналогового сигнала в коды старших и младших разрядов с использованием тем или другим способом двух преобразователей [1-3] Однако жесткая привязка преобразователей к определенному уровню сигнала ограничивает точность преобразователей в широком динамическом диапазоне, выходящем за пределы диапазона преобразователей. Кроме того, параллельно-последовательная структура преобразования, многоступенчатость прямых и обратных преобразований замедляет и усложняет процесс аналого-цифрового преобразования.
Способ [4] принятый в качестве прототипа, основан на использовании одного преобразователя, не привязанного жестко к уровню сигнала. Этот способ включает две операции сравнения преобразуемого сигнала с пороговыми уровнями, формирования по результатам сравнения коэффициента усиления входного масштабируемого устройства, после чего производится усиление входного сигнала с этим коэффициентом усиления и преобразования на АДП усиленного сигнала в цифровой код. Такая последовательность операций позволяет представлять измеряемую величину как бы в виде мантиссы ее цифрового кода. Указанный способ обеспечивает обработку в широком динамическом диапазоне. Однако необходимость проведения всей последовательности операций при каждом измерении (преобразовании) сигнала, наличие переходных процессов в цепи выбора диапазона существенно снижает быстродействие, что ограничивает класс измеряемых сигналов с точки зрения скорости и характера их изменения. В частности, этот способ не позволяет преобразовать быстроменяющиеся, например, нестационарные случайные процессы.
Цель изобретения повышение быстродействия без сужения динамического диапазона аналого-цифрового преобразования.
Сущность способа состоит в том, что входной аналоговый сигнал после усиления с коэффициентом усиления, значение которого кратно числу 2 и соответствует уровню входного сигнала, преобразуют в код мантиссы, а информацию о фактическом усилении преобразуют в код порядка. Таким образом формируется код преобразуемого сигнала в виде кода с плавающей запятой. Значение уровня входного сигнала оценивается по величине его среднего модуля, причем усреднение производится на скользящем интервале, а все операции масштабирования выполняются параллельно с операцией аналого-цифрового преобразования. Для этого предусматривается следующая последовательность операций. Исследуемый сигнал XA перед преобразованием на АЦП усиливают с коэффициентом усиления Ki и код числа XA•Ki оценивают как мантиссу. Одновременно из усиленного сигнала формируют сигнал, который сравнивают с рядом пороговых уровней A1, A2, A2m. Формирование включает в себя операции определения модуля, усиление последнего с коэффициентом  и последующее его усреднение. По результатам сравнения устанавливают коэффициент усиления по правилу
и последующее его усреднение. По результатам сравнения устанавливают коэффициент усиления по правилу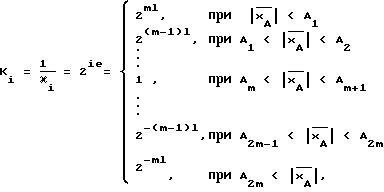
в котором 2e знаменатель геометрической прогрессии изменения пороговых уровней,  значение среднего модуля входного сигнала, i=-m, -(m-1), -1, 0, 1, m-1, m, а при окончательном формировании кода в качестве кода порядка используют код числа ie.
значение среднего модуля входного сигнала, i=-m, -(m-1), -1, 0, 1, m-1, m, а при окончательном формировании кода в качестве кода порядка используют код числа ie.
Таким образом, так как согласование преобразуемого сигнала с диапазоном АЦП производится не для каждого мгновенного значения сигнала, а для его среднего модуля процесс выбора и установки коэффициента усиления и кодирование порядка не требует дополнительного времени и поэтому время преобразования по данному способу определяется только лишь временем преобразования выбранного АЦП. Кроме того, так как предлагаемый способ обеспечивает (с учетом возможных кратковременных выбросов сигнала) задействование практически всех разрядов АЦИ, разрядность последнего может выбираться минимальной, с точки зрения заданной относительной погрешности преобразования, а возможный диапазон изменения уровня сигнала определяет число градаций усиления и разрядность кода порядка.
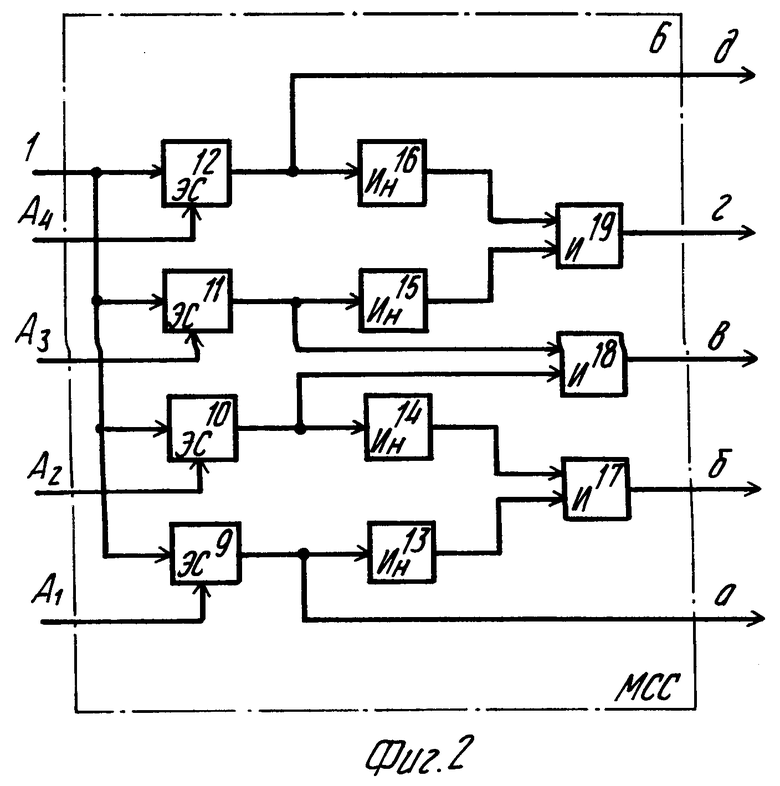
На фиг. 1 изображен вариант устройства для осуществления предлагаемого способа; на фиг. 2 вариант многопороговой схемы сравнения; на фиг. 3 - временная диаграмма работы устройства.
Устройство содержит управляемые усилители 1, 2 (УУ), блок 3 выделения модуля (БМ), блок 4 усреднения (БУср), датчик 5 уровней (ДУ), многопороговую схему 6 сравнения (МСС), АЦП7, регистр 8 порядка (РгП). Многопороговая схема сравнения для пяти градаций усиления содержит элементы сравнения 9, 10, 11, 12 (ЭС), инверторы 13, 14, 15, 16 (Ин), элементы И 17, 18, 19.
Устройство для осуществления предлагаемого способа работает следующим образом. Входной сигнал xA поступает на управляемый усилитель УУ1, где усиливается с коэффициентом Ki и после усиления поступает на вход АЦП7 и БМ3. На выходе БМ формируется значение модуля сигнала |KixA|. После прохождения управляемого усилителя УУ2 усиления с коэффициентом усиления  сигнал восстанавливает первоначальный масштаб и поступает на вход блока усреднения БУср. 4. В БУср. осуществляется экспоненциальное усреднение с заданной постоянной времени и сигнал с его выхода, равный среднему модулю входного сигнала
сигнал восстанавливает первоначальный масштаб и поступает на вход блока усреднения БУср. 4. В БУср. осуществляется экспоненциальное усреднение с заданной постоянной времени и сигнал с его выхода, равный среднему модулю входного сигнала  поступает на вход 1 МСС6, в которой происходит его сравнение с пороговыми уровнями A1-A4, выдаваемыми датчиком уровней ДУ5. В зависимости от результата сравнения на выходе МСС формируется один из сигналов а, б, в, г, д, который определяет текущее значение коэффициентов усиления Ki и κi и код порядка на выходе регистра порядка РгП8. Формирование значений мантиссы и запись порядка выходного кода производится при поступлении тактовых импульсов ТИ на тактовый вход устройства. Текущее значение кода порядка и коэффициента усиления формируется в МСС6 следующим образом. Значение сигнала среднего модуля поступает на первый вход МСС6, сравнивается на ЭС 9, 10, 11, 12 с пороговыми уровнями A1, A2, A3, A4, выдаваемыми ДУ5.
поступает на вход 1 МСС6, в которой происходит его сравнение с пороговыми уровнями A1-A4, выдаваемыми датчиком уровней ДУ5. В зависимости от результата сравнения на выходе МСС формируется один из сигналов а, б, в, г, д, который определяет текущее значение коэффициентов усиления Ki и κi и код порядка на выходе регистра порядка РгП8. Формирование значений мантиссы и запись порядка выходного кода производится при поступлении тактовых импульсов ТИ на тактовый вход устройства. Текущее значение кода порядка и коэффициента усиления формируется в МСС6 следующим образом. Значение сигнала среднего модуля поступает на первый вход МСС6, сравнивается на ЭС 9, 10, 11, 12 с пороговыми уровнями A1, A2, A3, A4, выдаваемыми ДУ5.
У элементов сравнения 9 и 11 используется выход "меньше" (<) а у элементов 10 и 12 "больше" (>). Если  , то на выходе элемента 9 появляется сигнал логической единицы, который в виде сигнала "a" устанавливает максимально возможное усиление на управляемым усилителем УУ1 и обратное ему по величине усиление на управляемом усилителе УУ2. Одновременно этот сигнал устанавливает единицу в младшем разряде регистра 8 порядка, а усиленный на усилителе 1 аналоговый сигнал xA преобразуется в полном диапазоне АЦП7 в код мантиссы. Таким образом, выходной код xц представляет сигнал xA в виде кода с плавающей запятой. Если в последующем уровень среднего модуля сигнала не выходит за пределы A1, то преобразование производится с неизменным усилением. При изменении уровня сигнала, т.е. при
, то на выходе элемента 9 появляется сигнал логической единицы, который в виде сигнала "a" устанавливает максимально возможное усиление на управляемым усилителем УУ1 и обратное ему по величине усиление на управляемом усилителе УУ2. Одновременно этот сигнал устанавливает единицу в младшем разряде регистра 8 порядка, а усиленный на усилителе 1 аналоговый сигнал xA преобразуется в полном диапазоне АЦП7 в код мантиссы. Таким образом, выходной код xц представляет сигнал xA в виде кода с плавающей запятой. Если в последующем уровень среднего модуля сигнала не выходит за пределы A1, то преобразование производится с неизменным усилением. При изменении уровня сигнала, т.е. при  на выходе "a" блока 6 появляется логический нуль, а логическая единица устанавливается на выходе "б", если
на выходе "a" блока 6 появляется логический нуль, а логическая единица устанавливается на выходе "б", если  , на выходе "в", если
, на выходе "в", если  , на выходе "г" если
, на выходе "г" если  и на выходе "д" если
и на выходе "д" если  . Соответственно, изменяются коэффициенты усиления на управляемых усилителях 1, 2 и устанавливается единица в соответствующем разряде регистра 8.
. Соответственно, изменяются коэффициенты усиления на управляемых усилителях 1, 2 и устанавливается единица в соответствующем разряде регистра 8.
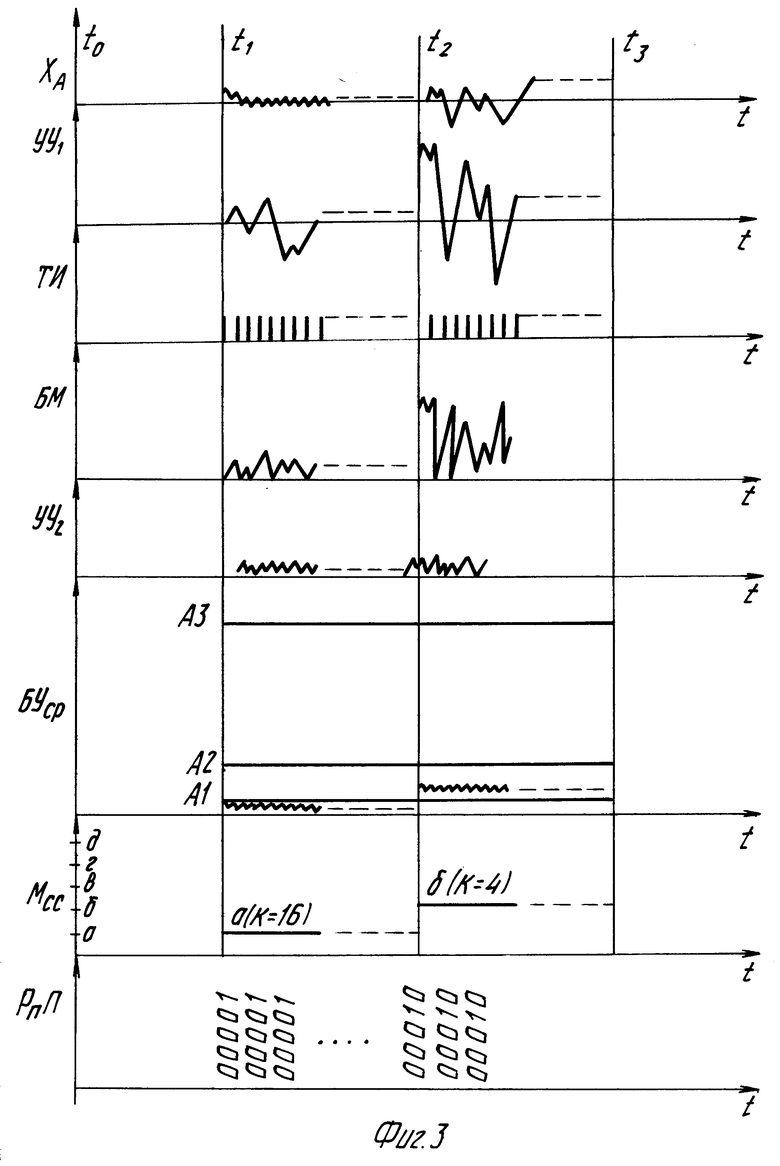
Принцип работы устройства может быть пояснен более детально с помощью временной диаграммы (фиг. 3).
На временной диаграмме приведены три временных интервала работы устройства. Интервал t0-t1 соответствует переходному процессу, происходящему в устройстве после подачи на него напряжения питания до подачи тактовых импульсов. Интервал t1-t2 характеризуется очень низкой интенсивностью. При такой интенсивности в случае использования прототипа преобразование сигнала выполняется с очень низкой точностью, так как в преобразовании участвуют только несколько младших разрядов АЦП. Момент t1 соответствует моменту включения тактовых импульсов ТИ. Интервал t2-t3 характеризуется более высокой интенсивностью сигнала. Временная диаграмма приведена для случая, когда e=2, т.е. Ki=22i=4i, что соответствует четырехкратному изменению коэффициента усиления на каждом пороге. Это означает, что динамический диапазон преобразования расширяется по сравнению с разрядностью АЦП в 256 раз, что эквивалентно увеличению разрядности АЦП на 8 разрядов. После подачи питания (момент t0) и в течение интервала времени от t0 до t1 происходит установление сигнала на выходе БУср4. В течение этого времени (время переходного процесса) МСС6 может несколько раз изменить значение коэффициента усиления Ki, однако выходной сигнал не формируется, так как тактовые импульсы не поступают на АЦП и РгП. В реальных устройствах переходный процесс при включении питания составляет от десятых долей до единиц секунд, что не является сколь-нибудь существенным ограничением для большинства технических приложений обработки сигналов. К моменту t1 подачи ТИ переходный процесс заканчивается. Интенсивность входного сигнала t1=t2 столь мала, что на выходе МСС6 устанавливается сигнал логической единицы ("1") в старшем разряде (выход "a" МСС6), которому соответствует значение Ki=16. При этом число значащих разрядов преобразования сигнала увеличивается на 4. Сигналу "1" на выходе "a" соответствует код порядка 00001.
Пусть в момент t2 интенсивность входного сигнала xA возросла так, что соответствующий ей сигнал на выходе БУср.4 оказался между порогами A1 и A2 и МСС6 выработала сигнал "1" на выходе "б". Сигналу "1" на выходе "б" соответствует коэффициент усиления Ki=4 и код порядка 00010, который учитывает изменившийся масштаб преобразования АЦП. При этом, так как изменения коэффициентов усиления УУ1 и УУ2 происходит одновременно, то скачки на входе и переходные процессы на выходе блока 4 усреднения исключаются. Кроме того, так как управление коэффициентами усиления производится параллельно и независимо от процесса преобразования, а содержимое выходов АЦП и регистра порядка однозначно определяют код величины аналогового сигнала при данном отсчете, то устройство работает с максимально возможным быстродействием, определяемым временем преобразования используемого АЦП. В тех случаях, когда дальнейшая обработка сигнала на ЭВМ производится в кодах с плавающей запятой, использование предлагаемого способа, исключающее необходимость программного преобразования кодов с фиксированной запятой в коды с плавающей запятой, позволяет экономить ресурсы ЭВМ.
Оценим выигрыш в быстродействии предлагаемого устройства по сравнению с прототипом при одинаковом динамическом диапазоне обрабатываемого сигнала.
В прототипе отсчеты выходного сигнала можно использовать не чаще, чем с периодом, превышающим время переходного процесса, связанного с переключением диапазона. При использовании в прототипе для управления коэффициентом передачи усилителя самых быстродействующих из выпускаемых промышленностью контактных реле время переключения диапазона не может быть меньше Tп=2мс. Использование же в качестве коммутирующих элементов транзисторов или микросхем приводит к резкому снижению точности преобразования (см. прототип, последний абзац на стр.85 и первый абзац на стр.86). Ограниченное быстродействие при выборе диапазона определяет частоту снятия отсчетов АЦП, которая не может быть выше, чем f=1/Tп=500 Гц, хотя быстродействие отдельно взятого АЦП существенно выше.
В отличие от прототипа в устройстве, реализующем предлагаемый способ, отсутствуют потери времени, связанные с переходом с одного диапазона на другой, и быстродействие определяется в основном быстродействием АЦП. Поэтому при использовании быстродействующей интегральной микросхемы (ИМС) АЦП общее быстродействие устройства по предлагаемому способу оказывается существенно выше, чем в прототипе. Так, например, при использовании в качестве АЦП микросхемы К1107ПВ2, выполнении управляемых усилителей, блока выделения модуля и блока усреднения на операционных усилителях К140 УД5, многопороговой схемы сравнения на микросхемах К597 СА2, К1533 ЛА3, регистра порядка на К1533 ТМ8, а датчика уровня на ПЗУ К556 РТ4А время преобразования в предлагаемом устройстве составляет 0,12 мкс, что более чем на 5 порядков меньше, чем в прототипе, и определяется практически времени преобразования АЦП (0,1 мкс).
Таким образом, предлагаемый способ благодаря высокому быстродействию позволяет производить преобразование быстроизменяющихся процессов в широком динамическом диапазоне с высокой точностью. Способ достаточно просто реализуется типовыми ИМС.
Пользуясь сведениями, приведенными в описании изобретения, представленными чертежами и используя существующую технологию и элементную базу, предлагаемый способ сравнительно легко может быть реализован в производстве, что характеризует объект изобретения как промышленно применимый.
Источники информации
1. Авторское свидетельство СССР N 1441477, HOM 1/06, 1988.
2. Балакай В. Г. и др. Интегральные схемы АЦП и ЦАП. Энергия, 1978, с. 76-77.
3. Авторское свидетельство СССР N 1305848, H O3 M 1/10, 1987.
4. Коломиец О.М. и др. Автоматический выбор диапазона измерения в цифровых приборах. Энергия, 1986, с.22 (прототип).
Изобретение относится к измерительной технике и может быть использовано для ввода аналоговой информации в цифровые вычислительные системы. Целью изобретения является повышение быстродействия при работе в широком динамическом диапазоне. Изобретение характеризуется тем, что входной аналоговый сигнал усиливают с адаптивно изменяющимся коэффициентом усиления и преобразуют сигнал в виде кода с плавающей запятой. При формировании кода порядка выполняют определение значений среднего модуля входного сигнала, которые сравнивают с рядом пороговых уровней, и по результатам сравнения устанавливают коэффициенты усиления входного сигнала и его модуля, величины которых находятся в обратной зависимости. 3 ил.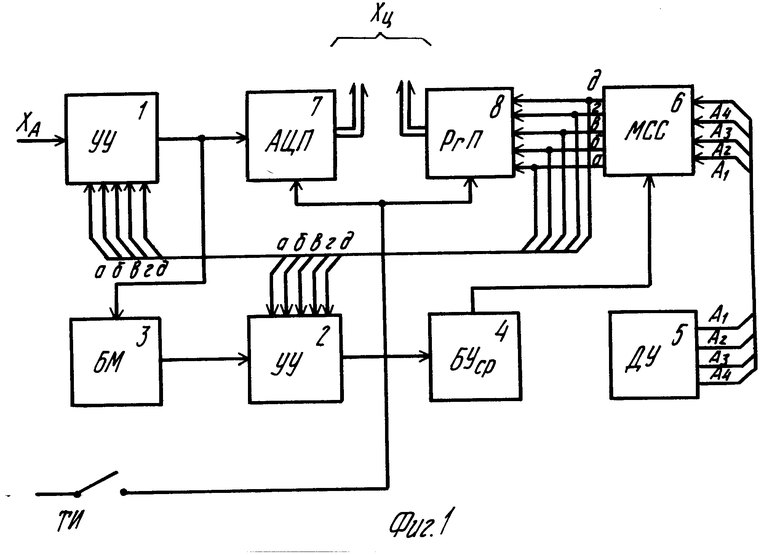
Способ аналого-цифрового преобразования, заключающийся в том, что входной аналоговый сигнал усиливают с переменным коэффициентом усиления Ki, усиленный сигнал преобразуют в цифровой двоичный код мантиссы кода с плавающей запятой, при этом для определения коэффициента усиления Ki, формируют дополнительный аналоговый сигнал, сравнивают его с рядом пороговых уровней A1, A2 A2 m и по результатам сравнения определяют коэффициент усиления Ki, отличающийся тем, что для формирования дополнительного сигнала определяют модуль усиленного аналогового сигнала, усиливают полученный сигнал с коэффициентом  и усредняют по времени, а коэффициент усиления Ki формируют по правилу
и усредняют по времени, а коэффициент усиления Ki формируют по правилу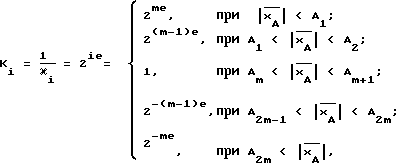
где 2е знаменатель геометрической прогрессии пороговых уровней; значение среднего модуля входного сигнала;
значение среднего модуля входного сигнала;
i -m, (m 1) -1, 0,1 m 1, m,
при этом в качестве кода порядка при преобразовании в цифровой двоичный код с плавающей запятой используют код числа ie.
| SU, авторское свидетельство, 1441477, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Коломиец О.Н | |||
| и др | |||
| Автоматический выбор для диапазона измерений в цифровых приборах | |||
| - М.: Энергия, 1980, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
