Изобретение относится к авиадвигателестроению.
Известно устройство приводного механизма направляющего аппарата компрессора с несколькими регулируемыми ступенями, содержащее несколько вращающихся в противоположных направлениях колец для пары ступеней, коленчатых валов для приведения в действие синхронно вращающихся колец, соединенных с несущими элементами конструкции, регулируемыми тягами и силовым механизмом привода [1]
Однако такая конструкция не обеспечивает возможности одновременного преимущественно линейного точного регулирования различных вариантов углов установки и интервалов углов поворота лопаток направляющих лопаточных аппаратов ступеней. Это объясняется тем, что для осуществления регулирования требуется дополнительный механизм поворота с большим регулирующим усилием. Кроме того, недостатком этой конструкции является невозможность осуществления непосредственного замера регулируемого параметра.
Известно также устройство для поворота направляющих лопаток турбины газотурбинного двигателя, в котором снаружи корпуса турбины перемещающееся кольцо через рычаги соединено с направляющими лопатками и установлено на несущем кольце с возможностью проворачивания на нем. Несущее кольцо имеет возможность упругого демпфирования в радиальном положении, подвижно подвешено и сцентрировано на спицах, соединенных с наружным корпусом турбины, и через шариковую опору для перемещающегося кольца соединено с ним под предварительным напряжением [2]
Недостатком данной конструкции является отсутствие возможности непосредственного замера регулируемого параметра углового положения лопаток турбины.
Наиболее близким к предлагаемому является устройство для регулирования положения поворотных направляющих лопаток входного направляющего аппарата второго каскада компрессора двигателя Д-30 [3]
Устройство содержит размещенное снаружи корпуса поворотное кольцо, соединенное шарнирно с направляющими лопатками, регулируемыми тягами и силовым механизмом привода.
Недостатком данной конструкции является низкая точность регулирования из-за неточности замера регулируемого параметра вследствие передачи вибрации от направляющего аппарата к измерительному элементу датчика.
Техническая задача, которую решает данное изобретение, заключается в повышении точности устройства путем непосредственного замера регулируемого параметра углового положения направляющих лопаток компрессора или турбины - датчиками углов положения лопаток и исключения влияния веса и вибраций регулируемых тяг на показания датчиков.
Сущность изобретения заключается в том, что устройство для регулирования положения поворотных направляющих лопаток компрессора или турбины газотурбинного двигателя, содержащее размещенное снаружи корпуса компрессора или турбины поворотное кольцо, шарнирно соединенное с направляющими лопатками, регулируемыми тягами и механизмом привода, согласно изобретению, дополнительно содержит датчики углов положения лопаток, каждый из которых соединен с одним механизмом привода через пару двухзвенных рычагов и дополнительную тягу, один край которой шарнирно соединен с передающим элементом механизма привода, а второй край с обоими рычагами и выполнен с возможностью перемещения шарнира рычага, жестко скрепленного с выходным элементом датчика в плоскости, проходящей через оси шарниров, расположенных по краям рычагов, при этом выходной элемент датчика размещен соосно шарниру рычага, скрепленного со стороны корпуса с дополнительной тягой.
Установка дополнительных датчиков углов положения лопаток, каждый из которых соединен с одним механизмом привода через пару двухзвенных рычагов и дополнительную тягу, дает возможность непосредственно замерять регулируемый параметр. Причем данное устройство может использоваться как для компрессорных, так и для турбинных направляющих лопаток.
Соединение дополнительной тяги одним краем с механизмом привода позволяет использовать такой передающий элемент механизма привода, в котором угол поворота или перемещение являются линейной функцией угла поворота лопаток направляющего аппарата.
Двигатель может иметь компрессорную или турбинную части с рядами поворотных статарных лопаток, в котором угол поворота лопаток второго, третьего и далее рядов может иметь нелинейную зависимость по отношению к углу поворота лопаток первого ряда или первого направляющего аппарата. При этом для регулирования предпочтительней использовать передающий элемент или шарнирное соединение.
Соединение второго края дополнительной тяги одновременно с двумя двухзвенными рычагами позволяет идентифицировать угловое перемещение рычага, жестко связанного другим краем с выходным элементом (валиком) датчика с угловым перемещением одного из передающих элементов механизма привода, а именно, имеющего преимущественно линейное перемещение в зависимости от угла поворота направляющих лопаток.
Выполнение шарнира рычага, жестко скрепленного с выходным элементом датчика, в плоскости, проходящей через оси шарниров, расположенных по краям рычагов, позволяет исключить влияние веса и вибраций дополнительной тяги на показания датчиков, также не изменяет показания углового перемещения рычага, жестко связанного с осью датчика, а также позволяет компенсировать погрешности изготовления и сборки рычагов и элементов датчика.
Размещение выходного элемента датчика соосно шарниру рычага, скрепленного со стороны корпуса с дополнительной тягой, позволяет компенсировать погрешности сборки датчика и рычагов, а главное компенсировать силовые перегрузки дополнительной тяги на корпус компрессора или турбины, исключив влияние дополнительной тяги на кинематическую цепь для привода датчика.
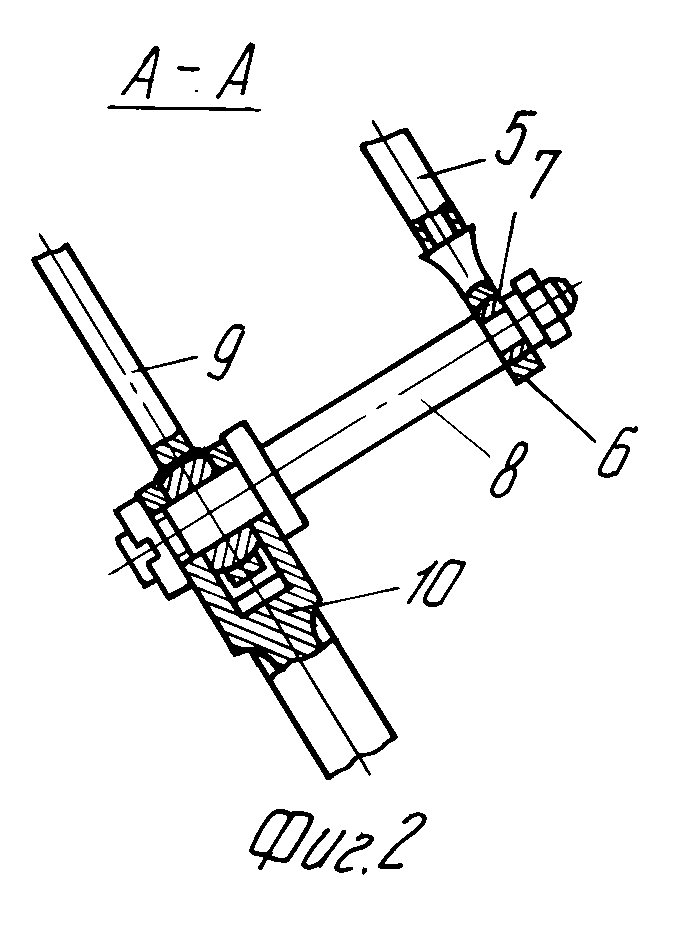
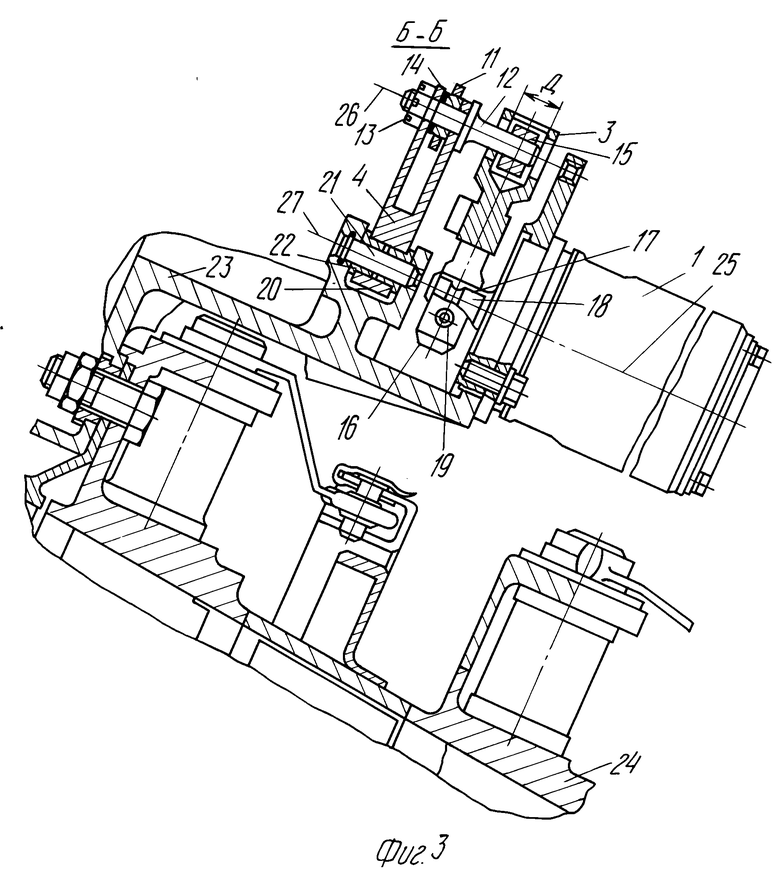
На фиг.1 представлен предпочтительный вариант схемы исполнительного механизма одного из двух датчиков углов положения поворотных направляющих лопаток компрессора или турбины; на фиг.2 разрез А-А на фиг.1; на фиг.3 разрез Б-Б на фиг.1 в увеличенном масштабе.
Предлагаемое устройство содержит датчики 1 (показан один из них), каждый из которых соединен с механизмом привода 2 через пару двухзвенных рычагов 3, 4 и дополнительную тягу 5, один край которой 6 шарнирно соединен при помощи сферического подшипника 7 с пальцем 8, который представляет собой продолжение аналогичного крепления основной тяги 9 с одним из передающих элементов 10 механизма привода 2.
Второй край 11 дополнительной тяги 5, соединенный при помощи пальца 12 и гайки 13 двумя шарнирными соединениями сферическим подшипником 14 с рычагом 4 и установленным с возможностью перемещения, но без зазора в отверстии Д цилиндрическим сухарем 15 с рычагом 3. При этом другой край 16 рычага 3 жестко скреплен с помощью шлиц 17 с выходным элементом измерительным валиком 18 датчика 1 при помощи болта 19. При этом рычаг 4 шарнирно закреплен другим краем 20 при помощи штифта 21 и втулок 22 на кронштейне 23, жестко связанным с корпусом 24 компрессора или турбины с наиболее массивной и менее подверженной вибрациям частью корпуса.
Измерительный валик 18 датчика 1 расположен соосно шарниру рычага 4, соединенного с дополнительной тягой 5 со стороны корпуса 24. Шарнир 15 рычага 3, жестко скрепленного другим краем 16 с валиком 18, выполнен с возможностью его перемещения в плоскости разреза Б-Б, проходящей через оси 25, 26 и 27 рычагов 3 и 4.
Передающий элемент 10 лопаток соединен с аналоговыми, формирующими и управляющими электронными блоками (не показаны). Выход одного датчика 1 соединен со входом управляющего электронного блока, а выход второго со входом бортовой системы контроля двигателя, которая контролирует положение поворотных лопаток в зависимости от непосредственного измеряемого параметра - углового перемещения лопаток Φнл
Регулирование осуществляется следующим образом.
Датчик 1 (типа ДБСКТ- 650-1Ш) устанавливают на наиболее массивной части корпуса 24 двигателя. На переходных режимах работы двигателя датчик 1 фиксирует отклонение угла Φнл с которого поступает электрический сигнал на управляющий электронный блок (типа РЭД-90). Он совместно с аналоговым и формирующим блоками формирует соответствующий сигнал о величине поправки частоты вращения ротора двигателя и соответствующего изменению поправки к величине Φнл Этот сигнал поступает на передающий элемент 10 механизма привода. По поступающему сигналу механизм привода производит перемещение поворотного кольца и направляющих лопаток.
При этом угловое перемещение передающего элемента 10 идентично воспринимается дополнительной тягой 5, край которой 11 шарнирно соединен с рычагами 3 и 4. Вибрации и перегрузки тяги 5 передаются только на рычаг 4 и элементы корпуса 24 и не передаются на датчик 1, т.к. демпфируются на корпусе 24.
Угловое перемещение рычага 4 идентично передается рычагу 3. При этом возможность шарнирного перемещения рычага 3, жестко связанного с выходным элементом валиком 18, позволяет исключить влияние веса, вибрации и перегрузок (усилий вдоль рычага 3) тяги 5 на валик 18, тем самым обеспечивая высокую точность замеров Φнл
Возможно подключение другого датчика, аналогичного датчику 1, к бортовой системе контроля двигателя. При этом измерение и контроль величины Φнл производится с помощью приборов в кабине пилота, что обеспечивает дублирование системы регулирования и электронное управление механизмом привода.
Механизм привода в случае выхода из строя электронной системы управления может работать также от гидромеханического привода топливного насоса - регулятора. При этом точность регулирования будет на порядок ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПОВОРОТНЫХ НАПРАВЛЯЮЩИХ ЛОПАТОК КОМПРЕССОРА ИЛИ ТУРБИНЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2389877C1 |
| ОСЕВОЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1998 |
|
RU2141062C1 |
| СТАТОР КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2193699C2 |
| ОСЕВОЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2111385C1 |
| ОСЕВОЙ КОМПРЕССОР ТУРБОМАШИНЫ | 2004 |
|
RU2267656C2 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ЛОПАТОК НАПРАВЛЯЮЩЕГО АППАРАТА СТАТОРА МНОГОСТУПЕНЧАТОГО КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674227C1 |
| СИСТЕМА УПРАВЛЕНИЯ СТУПЕНЯМИ ПОВОРОТНЫХ ЛОПАТОК СТАТОРА КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422644C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ СВЕРХВЫСОКОЙ СТЕПЕНИ ДВУХКОНТУРНОСТИ | 2005 |
|
RU2315887C2 |
| СТАТОР КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2117826C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАПРАВЛЯЮЩИМИ АППАРАТАМИ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674173C1 |
Использование: в компрессоро- и турбостроении. Сущность изобретения: датчик 1 устанавливают на корпус 24 двигателя. На переходных режимах двигателя датчик 1 фиксирует отклонение угла Φ направляющих лопаток, с которого поступает электрический сигнал на управляющий электронный блок. Он формирует сигнал о величине поправки частоты вращения ротора двигателя и соответствующего изменению поправки к величине Φнл . Этот сигнал поступает в механизм привода, который производит перемещение поворотного кольца и направляющих лопаток. Угловое перемещение элемента 10 идентично воспринимается тягой 5. Вибрации и перегрузки тяги 5 передаются только на рычаг 4 и элементы корпуса 24, где они демпфируются. Угловое перемещение рычага 4 идентично передается рычагу 3. Возможность шарнирного перемещения рычага 3, жестко связанного с выходным элементом 18, позволяет исключить влияние веса, вибраций и перегрузок (усилий вдоль рычага 3) тяги 5 на валик 18, тем самым обеспечивая высокую точность замеров Φнл . 3 ил.
Устройство для регулирования положения поворотных направляющих лопаток компрессора или турбины газотурбинного двигателя, содержащее размещенное снаружи корпуса компрессора или турбины поворотное кольцо, шарнирно соединенное с направляющими лопатками, регулируемыми тягами и механизмом привода, отличающееся тем, что оно дополнительно содержит датчики углов положения лопаток, каждый из которых соединен с одним механизмом привода через пару двухзвенных рычагов, и дополнительную тягу, один край которой шарнирно соединен с передающим элементом механизма привода, а второй край с обоими рычагами и выполнен с возможностью перемещения шарнира рычага, жестко скрепленного с выходным элементом датчика, в плоскости, проходящей через оси шарниров, расположенных по краям рычагов, при этом выходной элемент датчика размещен соосно шарниру рычага, скрепленного со стороны корпуса с дополнительной тягой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE, патент, 4102188, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 3873230, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Техническое описание | |||
| - М.: Машиностроение, 1971, с.19, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

