Изобретение относится к области весоизмерительной техники, в частности к дозаторам сыпучих материалов непрерывного действия.
Известны дозаторы сыпучих материалов, содержащие питатель, маятниковый транспортер с приводом, управляемый системой слежения, и счетчик дозируемого материала (1). Недостатком известных устройств является то, что они не обеспечивают требуемую точность дозирования, так как изменение скорости ленты весового транспортера в процессе управления изменяет статистические характеристики истечения материала из питателя, на основе которых рассчитываются настроечные параметры системы.
Наиболее близким техническим решением, принятым в качестве прототипа, является дозатор, система слежения которого выполнена в виде подвижного компенсирующего груза, кинематически связанного с диском счетчика и ведомым диском фрикциона, установленным с возможностью перемещения относительно ведущего диска, вращающегося со скоростью, пропорциональной скорости ленты транспортера. Суммирующий счетчик выдает информацию о массе отдозированного материала (2).
Недостатком известного устройства является отсутствие возможности фиксировать малые отклонения массы на ленте весового конвейера, поскольку входящие в состав системы дискретные датчики крайнего положения весового транспортера обладают зоной нечувствительности и реагируют на отклонение ленты весового транспортера только при ее превышении. Стремление избавиться от этого недостатка путем уменьшения зоны нечувствительности приводит к возникновению незатухающих колебаний в системе и потере ею измерительных свойств.
Технической задачей, решаемой изобретением, является повышение точности измерения отдозированной массы материала.
Решение указанной задачи достигается тем, что известный дозатор сыпучих материалов, содержащий питатель, маятниковый транспортер с приводом и системой слежения в виде подвижного компенсирующего груза, перемещаемого приводом по сигналам датчиков крайнего положения транспортера и счетчика дозированного материала, согласно изобретению, дополнительно снабжен датчиком потенциометрического типа, электронным интегратором, реле и тахогенератором, вращаемым приводом маятникового транспортера, при этом неподвижная часть потенциометрического датчика подключена к выходу тахогенератора, а подвижная - жестко связана с маятниковым транспортером и подключена к первому входу электронного интегратора, второй вход которого через нормально замкнутый контакт реле связан со средней точкой неподвижной части потенциометрического датчика.
Предлагаемый дозатор сыпучих материалов отличается от прототипа тем, что он дополнительно снабжен потенциометрическим датчиком, тахогенератором, реле и электронным интегратором, причем неподвижная часть потенциометрического датчика подключена к выходу тахогенератора, вращаемого приводом весового транспортера, а подвижная к первому входу электронного интегратора, второй вход которого через нормально замкнутый контакт реле, срабатывающего от выходного сигнала дискретных датчиков, электрически связан со средней точкой неподвижной части потенциометрического датчика, что обеспечивает подключение потенциометрического датчика к электронному интегратору при отклонениях весового транспортера, не превышающих зону нечувствительности датчиков крайнего положения, и отключение потенциометрического датчика при отклонениях весового транспортера, превышающих зону нечувствительности датчиков крайнего положения и приводящих к их срабатыванию. Таким образом, заявляемый дозатор соответствует критерию "новизна".
В известных источниках информации, использованных для определения уровня техники, не описана совокупность заявляемых признаков, кроме этого, она не является очевидной, так как не следует непосредственно из уровня техники. На основании этого можно утверждать, что заявляемое техническое решение является новым и неочевидным, то есть соответствует критериям изобретения "новизна" и "технический уровень". При этом заявляемое техническое решение вполне осуществимо в промышленных условиях (см. чертеж). Следовательно, представленное устройство соответствует всем критериям изобретения.
Сущность изобретения заключается в следующем.
Дозаторы непрерывного действия являются системами автоматического регулирования расхода, и поэтому их качественные характеристики должны оцениваться исходя из положения, принятого в теории управления. Ошибка дозирования определяет интеграл вида ΔG = ∫ΔQdt, где ΔQ отклонение производительности дозатора от заданного значения, и называется в теории управления линейной интегральной оценкой I1, величина которой обратно пропорциональна коэффициенту усиления системы K. Чем больше K, тем меньше I1. Бесконтактные датчики дискретного действия на схеме прототипа (2) образуют нелинейный элемент с релейной характеристикой, обладающей зоной нечувствительности. В таких системах возможности увеличения коэффициента усиления ограничены, так как это ведет к возникновению автоколебаний. Расширить область устойчивых процессов в системе можно за счет увеличения зоны нечувствительности нелинейного элемента. Однако это ведет к возрастанию нескомпенсированной погрешности регулирования, то есть ошибки дозирования. Уменьшение зоны нечувствительности в свою очередь приводит к возникновению автоколебаний уже при малых значениях. Замена в системе слежения нелинейного элемента в виде бесконтактных дискретных датчиков линейным датчиком, например, потенциометрического типа с линейной статической характеристикой не дает повышения точности измерения массы, так как частота малых по амплитуде высокочастотных колебаний весового транспортера, вызванная малыми отклонениями массы материала на ленте, находится за частотой среза системы, то есть нечувствительности к воспроизведению высокочастотных колебаний, которые система практически не воспроизводит. При больших же отклонениях массы на ленте весового транспортера, когда для повышения точности необходимо высокое быстродействие системы, линейное управление менее эффективно, чем релейное. Поэтому для повышения точности дозирования необходимо, чтобы малые отклонения массы на ленте весового транспортера измерялись линейным датчиком без включения системы слежения, а при больших при включении двигателя перемещения компенсирующего груза и отключенном линейном датчике измерения малых отклонений.
На чертеже показана схема описанного дозатора. Точками a и b обозначены одноименные точки подключения неподвижной части потенциометрического датчика к тахогенератору.
Дозатор содержит питающее устройство 1, ленточный весовой транспортер 2, установленный на оси качания 3. На одном конце ленточного транспортера установлена система слежения 4 за массой материала, находящегося на ленте. Она состоит из компенсирующего груза 5, выполненного с возможностью перемещения по винту 6 от двигателя 7 и кинематически связанного с ведомым фрикционным диском 8, на вращающейся оси которого жестко закреплен зубчатый диск 9, зубцы которого входят в прорезь бесконтактного датчика 10. Пропорционально числу прошедших зубцов датчик передает сигнал на счетчик импульсов 11. Ведущий фрикционный диск 12 вращается с постоянной скоростью двигателя 13 и касается в точке 14 ведомого фрикционного диска 8. Подвижная часть 15 потенциометрического датчика 16 и бесконтактных датчиков крайнего положения 17 жестко связана с весовым транспортером. Неподвижная часть 18 потенциометрического датчика 16 со средней точкой 19 электрически связана с тахогенератором 20 и запитывается его напряжением. Тахогенератор вращается приводом транспортера 21 и вырабатывает напряжение Uт, пропорциональное скорости ленты Uл весового транспортера: Uт=KтUл. Выходной сигнал потенциометрического датчика 16 между его средней точкой 19 и подвижной частью 15 через нормально замкнутый контакт 22 подается на входы 23, 24 интегратора 25. Выходной сигнал бесконтактных датчиков 17 подается на реле 26, которое при срабатывании размыкает свой нормально замкнутый контакт 22 и включает двигатель 7.
Дозатор работает следующим образом.
При поступлении материала из питающего устройства 1 на движущуюся с постоянной скоростью ленту весового транспортера 2 нагруженный массой материала 6 его конец отклоняется от горизонтали, перемещая подвижную часть 15 потенциометрического датчика 16 и бесконтактных датчиков 17.
При отклонениях транспортера, меньших зоны нечувствительности бесконтактных датчиков крайнего положения 17, напряжение Uп, снимаемое с потенциометрического датчика 16 между его подвижной частью 15 и средней точкой 19 неподвижной части 18 при замкнутом контакте 22 поступает на входы 23, 24 интегратора 25. Так как
Uт=KтUл=igR, lg=K2G,
то 
где lg смещение подвижной части потенциометрического датчика 15, обладающего сопротивлением R, от средней точки 19; ig ток потенциометрического датчика 16; Kт, K1, K2, K=Kт•K1•K2/R постоянные коэффициенты; Q - производительность дозатора.
На табло интегратора 25 фиксируется масса материала за время измерений потенциометрическим датчиком.
При отклонениях весового транспортера, больших зоны нечувствительности датчиков крайнего положения 17, срабатывает один из бесконтактных датчиков 17, срабатывает реле 26, размыкая свой контакт 22, и включается двигатель 7, заставляющий передвигаться по винту 6 груз 5 в положение, при котором ленточный транспортер 2 возвращается в горизонтальное положение. Тогда подвижная часть 15 выйдет из прорези одного из бесконтактных датчиков 17, реле 26 отключится, его контакт 22 замкнется и электрическая цепь потенциометрического датчика 16 на входе 23 электронного интегратора 25 восстановится, а двигатель 7 отключится. Кинематическая связь подвижного груза 5 с ведомым диском 8 обеспечивает перемещение диска 8 пропорционально перемещению груза 5. Смещение точки контакта 14 фрикционных дисков 8, 12 в радиальном направлении приводит к изменению числа оборотов ведомого диска 8. На одной оси с диском 8 закреплен зубчатый диск 9, входящий в прорезь датчика 10. Воспринятые от каждого зубца диска 9 импульсы суммируются счетчиком 11. Информация выдается счетчиком импульсов 11 в цифровом виде. Таким образом, число импульсов пропорционально числу оборотов ведомого диска 8, а число оборотов пропорционально положению компенсирующего груза 5. Положение последнего в свою очередь пропорционально массе материала, находящегося на ленте транспортера.
Таким образом, полная масса отдозированного материала определяется как сумма показаний счетчика 11 и электронного интегратора 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 1972 |
|
SU343156A1 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1972 |
|
SU336527A1 |
| ТОПЛИВНАЯ СИСТЕМА ДИЗЕЛЯ | 1991 |
|
RU2053406C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ТОРМОЗНОМ ПРИВОДЕ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2095263C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДОРОЖНЫХ ОДЕЖД | 1997 |
|
RU2134738C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНОЙ ОДЕЖДЫ | 1998 |
|
RU2148691C1 |
| РАБОЧИЙ ОРГАН ДЛЯ РАЗРУШЕНИЯ ЛЕДЯНЫХ ОБРАЗОВАНИЙ НА ДОРОГАХ И ТРОТУАРАХ | 1992 |
|
RU2022080C1 |
| СИСТЕМА ЗАЖИГАНИЯ "УНИВЕРСАЛ МАДИ" | 1996 |
|
RU2109163C9 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2117722C1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО ОТОБРАЖЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2281865C2 |
Использование: весоизмерительная техника. Сущность изобретения: при поступлении материала на ленту транспортера 2 транспортер отклоняется, перемещая подвижную часть 15 потенциометрического датчика 16 и бесконтактных датчиков 17. При малых отклонениях транспортера напряжение, снимаемое с потенциометрического датчика 16 при замкнутом контакте 22, поступает на входы 23, 24 интегратора 25. Интегратор 25 фиксирует массу материала за время измерений потенциометрическим датчиком. При больших отклонениях транспортера срабатывает один из бесконтактных датчиков 17. Включается реле 26, размыкая контакт 22. Включается двигатель 7, который смещает компенсирующий груз 5 по винту 6. Транспортер 2 возвращается в горизонтальное положение и подвижная часть 15 выходит из прорези одного из бесконтактных датчиков 17. Реле 26 отключается, его контакт 22 замыкается и электрическая цепь на входе 23 электронного интегратора 25 восстанавливается, а двигатель 7 отключается. Пропорционально смещению груза 5 перемещается диск 8, и меняется его скорость. Зубчатый диск 9, закрепленный на одной оси с диском 8, входит в прорезь датчика 10. Число импульсов от диска 9 суммируется счетчиком 11 и пропорционально массе материала, находящегося на ленте транспортера. Полная масса отдозированного материала равна сумме показаний счетчика 11 и интегратора 25. 1 ил.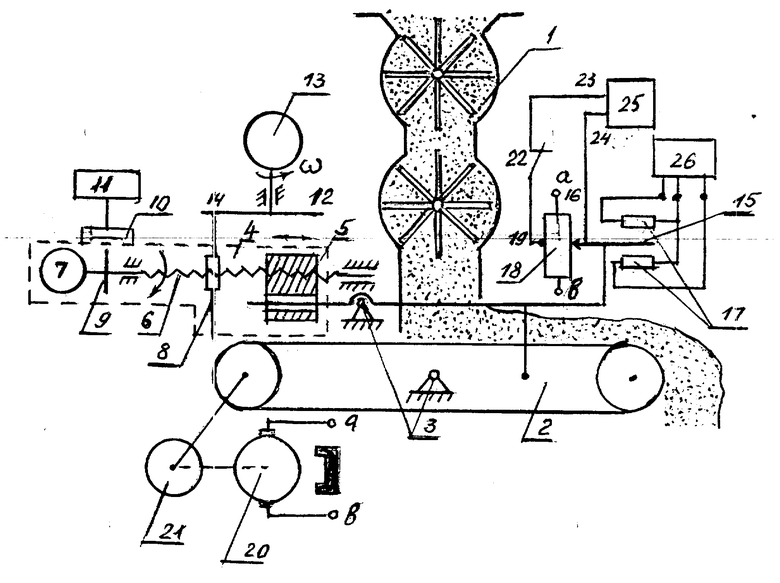
Дозатор сыпучих материалов, содержащий питатель, маятниковый транспортер с приводом, систему слежения, выполненную в виде установленного с возможностью перемещения компенсирующего груза, связанного с автономным приводом, управляемым по сигналу датчиков крайнего положения транспортера, и счетчика дозированного материала, отличающийся тем, что он снабжен датчиком потенциометрического типа, электронным интегратором, реле и тахогенератором, соединенным с приводом маятникового транспортера, при этом неподвижная часть датчика потенциометрического типа подключена к выходу тахогенератора, а подвижная жестко связана с маятниковым транспортером и подключена к первому входу электронного интегратора, второй вход которого через нормально замкнутый контакт реле соединен со средней точкой неподвижной части датчика потенциометрического типа, при этом реле выполнено с возможностью размыкания его контакта по сигналу одного из датчиков крайнего положения транспортера.
| Марсов В.И., Славуцкий В.А | |||
| Автоматическое управление технологическими процессами на предприятиях строительной индустрии.- Л.: Стройиздат, 1975, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| SU, авторское свидетельство, 343156, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
