Изобретение относится к автоматическим дозаторам сыпучего материала, применяемым на бетонных заводах и бетоносмесительяых установках непрерывного действия.
Известны а;втоматИ1ческие дозаторы сыпучего материала, содержащие питатель, весовой транспортер, привод последни.х, автоматические системы регулирования веса и скорости.
В этих дозаторах си-стема автоматического регулирования приводом вариаторов является контактной. Кроме того, при применении в качестве исполнительных двигателей трехфазных асинхронных двигателей снижается допустимая частота включений из-за перегрева двигателей, что в сочетании с большим маховым моментом ротор двигателя уменьшает динамическую точность регулирования, а следовательно точность дозирования.
Целью данного изобретения является увеличение динамической точности дозирования, а также быстродействия к надежности системы автоматического регулирования веса и скорости.
Достигается это тем, что в системы автоматического регулирования веса и скорости введен тиристорный усилитель, включенный на выход бесконтактного регулятора, управляющий исполнительным двигателем, причем
между тиристорным усилителем и регуляторам подключены триоды и резисторы.
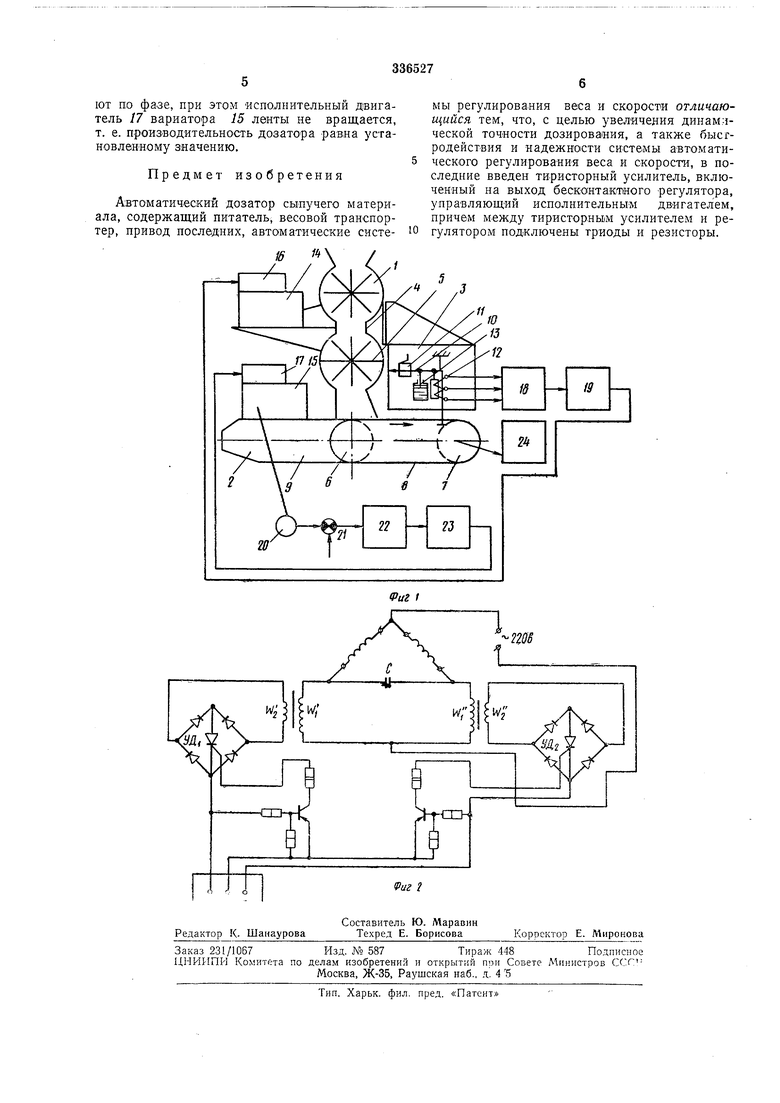
На фиг. 1 изображена структурная схема автоматического дозатора с двумя независимыми бесконтактнЫМИ системами регулирования; на фиг. 2 - принципиальная электрическая схема тиристорного усилителя.
Дозатор включает в себя следующие основные узлы: двухбарабанный питатель 1, весовой транспортер 2, весовой шкаф 3, привод питателя, привод ленты и две независимые замкнутые бесконтактные системы регулирования. Двухбарабаииый питатель ) состоит из двух вертикально расположенных корпусов 4 с вмонтированными в них восьмиячейковыми барабанами 5. Весовой транспортер 2 подвешен к корпусу питателя через призменную подвеску и состоит из ведущего 6 и ведомого 7 барабанов, ленты 8 и связывающих деталей, образующих раму 9. Взвешивание весового транспоргера с материалом осуществляется посредством весового шкафа 3, содержащего главное коромысло 10 с подвижным грузом /У; с главным коро.мыслом связан плунжер индуктивного датчика 12 и гидравлический демпфер 13.
лепием типа ВЦ-4Д. Привод ленты осуществляется от трехфазного асинхронного двигателя через цепной пластиичатый вариатор 15 с дистанционным управлением типа ВЦ-1Д. Дистанционлое управление вариаторами ВЦ-1Д, ВЦ-4Д осуществляется однофазными конденсаторами двигателями 16, 17 с полым ротором. Система регулирования дозатора представляет собой совокупность двух независимых замкнутых бесконтактных систем автоматического регулирования: систему регулирования веса на ленте ве-сового транспортера и систему регулирования ее скорости.
Система регулирования веса включает следующие элементы: иедуктивный датчик 12, бесконтактный регулятор 18, тиристорный усилитель 19 и исполнителвный конденсаторный двигатель 16 с полым ротором. Система регулирования скорости состоит из следующих элементов: тахогенератора 20 постоянного тока, встроенного в вариатор привода ленты и вырабатывающего напряжение, пропорциональное скорости ленты, диставционного задатчика 21, бесконтактного регулятора 22, тиристорного усилителя 23 и исполнительного конденсаторного двигателя 17 с полым ротором. Тиристорный усилитель, входящий в каждую из систем регу.тирования, состоит из двух согласующих трансформаторов, двух диодных мостов, в двигатель каждого из КОТОРЫХ включены управляемые диоды УДь УДг (тиристоры), триодов и резисторов. Включение тиристоров через согласующие трансформаторы позволяют осуществить электрическую развязку цепи нагрузки и цепи управления, что особенно важно и необходимо при управлении реверсивным цриводом. Дозатор оснащен интегратором (счетчиком) 24 расхода сыпучего материала. Подсчет расхода материала сводится к подсчету числа оборотов ведомого барабана тран;опортера (в силу того, что вес материала на ленте неизменен при любой ее скорости).
Работает автоматический дозатор следующим образом. Материал двухбарабанным питателем / подается на ленту весового транспортера 2. Момент силы тяжести веса материала на ленте уравновешивается моментом, создаваемым подвижным грузом 11, расположенным на коромысле 10 весового шкафа 3. С коромыслом связан плунжер индуктивного датчика 12 и гидравлический демпфер 13. Когда вес материала равен заданному значению (это значение определяется .положением подвижного груза //, выбираемым один раз при настройке), то плунжер индуктивного датчика 12 находится в положении электрического нуля и система регулирО1вания находится в покое. Если по какой-либо причине вес материала изменится, то момент силы тяжести материала на ленту не будет равен моменту, создаваемому грузом, и поэтому коромысло отклонится от горизонтали. Это отклонение вызовет перемещение плунжера индуктивного датчика 12, в результате чего на вход электронного бесконтактного регулятора 18 подается напряжение, отличное от нуля. На выходе регулятора появится сигнал, сформированный по изодромному закону. Этот сигн-ал, усиленный по мощности и напряжению тиристор5 ным усилителем 19, включит однофазный исполнительный двигатель 16 вариатора 14 питателя. Вариатор начнет изменять свое передаточное отношение, а тем самым число оборотов питателя и его производительность до
0 тех пор, пока вес материала на ленте не вернется к установленному значению. Направление изменения производительности питателя определяется знаком углового отклонения коромысла от горизонтали - фазой выходного сигнала индуктивного датчика - наличием напряжения на управляющей обмотке исполнительного конденсаторного двигателя с полым ротором. Так как эти две системы независимы и вес материала на ленте при любой ее скорости поддерживается неизменным, то, изменяя скорость ленты, можно установить любое требуемое значение производительности путем изменения установки дистанционного задатчика 21 системы регулирова5 ПИЯ скорости ленты.
Работает эта система следующим образом. Тахогенератор 20 постоянного тока, располол енный на выходном валу вариатора ленты, вырабатывает напряжение, пропорциональное скорости движения ленты. Это напряжение сравнивается с задающим напряжением, снимаемым с дистанционного задатчика 21, разность этих напряжений (рассогласование) поступает на вход бесконтактного регулятора 22. При появлении сигнала на выходе регулятора отпираются тиристоры УЛ или УДг тиристорного усилителя 23, при этом щунтируется первичная обмотка (W/ или Wi) согласующих трансформаторов. Сопротивление
0 первичной обмотки резко падает и все напряжение сети полностью прикладьгеается к одной из обмоток исполнительного двигателя 17, а другая обмотка 0|Ка Зывается подсоединенной к сети через фазосдвигающий конден55 сатор С. Направление вращения этого двигателя зависит от полярности напряжения рассогласования и определяется включением тиристоров УД, или УДа.
Исполнительный двигатель 17 вариатора
0 15 ленты нач1инает изменять передаточное отношение вариатор-а до тех пор, пока сигнал на.выходе регулятора 22 не станет равным нулю, т. е. пока число оборотов выходного вала вариатора, а следовательно производительность дозатора, не станет равной установленному значению. При этом сигнал с бесконтактного регулятора 22 не поступает, тиристоры УД и УДз запираются при пер-вом уменьшении прямого тока ниже удерживающего тока
0 тиристора. Обе обмотки исполнительного двигателя 17 оказываются подсоединенными к сети через одинаковые и большие по величине сопротивления и все напряжение сети приходится на первичные обмотки (W/, W/) со

| название | год | авторы | номер документа |
|---|---|---|---|
| ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 1972 |
|
SU343156A1 |
| ВЕСОВОЙ ДОЗАТОР | 1968 |
|
SU219234A1 |
| ВЕСОВОЙ ДОЗАТОР;'г:;:-;:';;;;1-;;л-г:г j^ | 1964 |
|
SU162679A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| ВЕСОВОЙ ДОЗАТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1972 |
|
SU344285A1 |
| ВЕСОВОЙ ДОЗАТОР С ОТСЧЕТНЫМ УСТРОЙСТВОМ В ВИДЕ ЦИФЕРБЛАТА И КОНТАКТНЫХ ИЛИ БЕСКОНТАКТНЫХДАТЧИКОВ | 1964 |
|
SU164977A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА УНИВЕРСАЛЬНОГО ДЕЙСТВИЯ | 1971 |
|
SU299369A1 |
| БЕСКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ТЕМПЕРАТУРА—ЦИФРА | 1966 |
|
SU186554A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ | 1973 |
|
SU395234A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
