Изобретение относится к контрольно-измерительной технике и предназначено для оценки качества деталей при изготовлении и ремонте, а конкретно к дефектоскопии с использованием вычислительной томографии.
Известны схемы вычислительных томографов, применяемых для дефектоскопии деталей и изделий, в которых происходит получение излучения, их регистрация и последующая обработка информации, полученной с детекторов /1/.
Наиболее близким к предлагаемому устройству по технической сущности является вычислительный томограф /2/, содержащий источник излучения с веерным пучком, сканер, осуществляющий рабочие перемещения объекта контроля, матрицу детекторов, располагаемую в веерном пучке за объектом контроля и блок управления и обработки информации, входы которого подключены к выходам детекторов и сканера.
Однако это устройство имеет существенный недостаток: невозможность получить томограмму локальной зоны в объекте контроля.
Целью изобретения является повышение разрешения устройства в выбранной локальной зоне объекта контроля.
Цель достигается тем, в вычислительном томографе, содержащем источник излучения с веерным пучком, сканер, осуществляющий перемещение объекта контроля, матрицу детекторов, располагаемую в веерном пучке за объектом контроля, и блок контроля и блок управления и обработки информации, вход которого подключен к выходам детекторов, в качестве детекторов матрицы детекторов используются дополнительные микроматрицы детекторов с единичным детектором, размер которого вдоль направления сканирования составляет 1/K от ширины детектора основной матрицы, где K требуемый масштаб увеличения локальной томографии.
На фиг. 1 дано предлагаемое устройство.
Оно содержит вычислительный томограф, содержащий источник 1 излучения с веерным пучком 2, сканер 3, осуществляющий рабочие перемещения объекта 4 контроля, матрицу 5 детекторов 6, располагаемую в веерном пучке за объектом 4 контроля, и блок 7 управления и обработки информации, входы которого подключены к выходам детекторов 6 и сканера 3.
Предлагаемое устройство работает следующим образом.
Излучение от точечного источника 1 проходит через объект 4 контроля, перемещаемый сканером 3, осуществляющим возвратно-поступательное перемещение и дискретное вращение объекта контроля, и попадает на многоканальную матрицу 5 детекторов 6. После осуществления траверса, т.е. прохода объекта в одну сторону, мы имеем количество проекций N по числу детекторов в матрице, причем каждая угловая проекция отличается от соседней на угол α между направлениями, фокус источника центр соседних детекторов. Таким образом, за один траверс собираются проекционные данные в угле aN Поскольку всего нужно собрать данные в угле 180o, то количество траверсов равно 180/ αN а после каждого траверса объект поворачивается вокруг своей оси на угол αN При этом по полному набору данных строится томограмма всего поперечного сечения объекта.
При построении томограммы не всего сечения, а локальной зоны этого сечения (так называемый "режим локальной томографии"), пространственное разрешение должно быть выше, чем режим нормальной томографии.
Допустим, формат реконструируемого сечения в режиме нормальной томографии 512•512. Тогда размер элемента (пикселла) составит Д/512, где Д диаметр объекта. Если размер локальной томограммы Д/К, то размер элемента при этом же формате изображения (512•512) должен быть Д/512 К.
Для осуществления режима локальной томографии надо автоматически заменять исходную матрицу детекторов с тем же количеством детекторов и с той же дугой окружности, но размер единичного детектора должен быть уменьшен в К раз. Но тогда угол видения матрицы и допуск также уменьшается в К раз. При этом следует рассмотреть два случая: когда локальная зона расположена в центре сечения и когда была смещена относительно центра.
Если зона расположена осесимметрично в центре сечения, то достаточно определить радиус локальной зоны и сканирование производить следующим образом: стол с объектом ускоренно перемещается до тех пор, пока крайний луч пучка излучения в угле αN / К не подойдет к краю локальной зоны. Тогда включается уменьшенная скорость, такая, что время траверса локальной зоны равно времени траверса всего сечения в нормальном режиме. Далее производится поворот объекта на угол αN и производится в обратном направлении траверс точно таким же образом и т.д. Если же локальная зона неосесимметрична, то управляющий компьютер должен для каждого траверса вычислить положение точки, с которой начинается замедленное движение сканера, и получение точки, с которой начинается замедленное движение сканера и получение проекционных данных, т.к. для каждого траверса положение этой точки различно.
После набора полного пакета данных в угле 180o реконструкция томограммы локальной зоны производится также, как для нормального режима.
Предложенное устройство было опробовано в виде макета и показало увеличение геометрического разрешения, пропорциональное количеству детекторов в микроматрице, заменяющей каждый из детекторов основной матрицы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ | 1994 |
|
RU2097748C1 |
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ | 1994 |
|
RU2098795C1 |
| РЕНТГЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1996 |
|
RU2098796C1 |
| ПРОМЫШЛЕННЫЙ ТОМОГРАФ | 2014 |
|
RU2542600C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ВЕСОВОГО СОДЕРЖАНИЯ КОМПОНЕНТОВ В ИЗДЕЛИИ | 1997 |
|
RU2122723C1 |
| СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ | 1999 |
|
RU2180745C2 |
| ПРОДОЛЬНЫЙ РЕНТГЕНОВСКИЙ ТОМОГРАФ | 1998 |
|
RU2148816C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ | 1995 |
|
RU2102717C1 |
| ПРОМЫШЛЕННЫЙ ТОМОГРАФ | 2010 |
|
RU2431825C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ | 1996 |
|
RU2120122C1 |
Использование: изобретение относится к контрольно-измерительной технике и предназначено для оценки качества деталей при изготовлении и ремонте, конкретно - к дефектоскопии с использованием вычислительной топографии. Сущность: вычислительный томограф содержит источник излучения с веерным пучком, сканер, осуществляющий рабочие перемещения объекта контроля и матрицу детекторов, располагаемую в веерном пучке за объектом контроля. В качестве детекторов матрицы используется микроматрица детекторов с единичными детекторами, размер которых вдоль направления сканирования составляет к-ю часть от ширины детектора матрицы, где К-требуемый масштаб увеличения локальной томографии. 1 ил.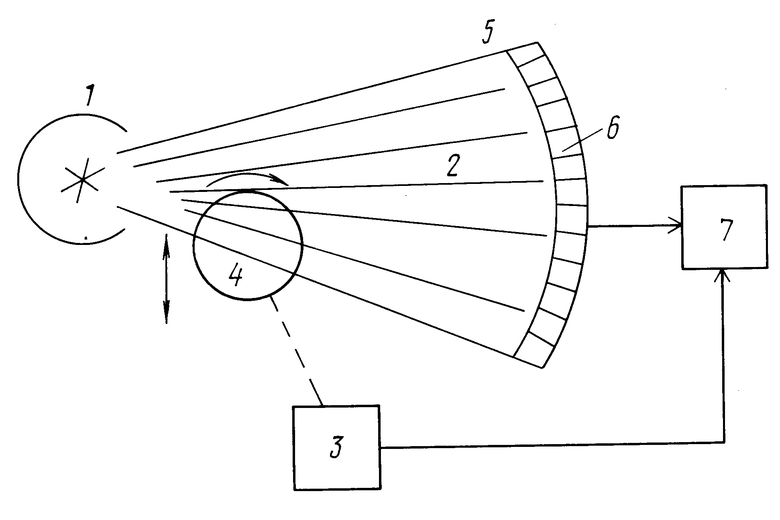
Вычислительный томограф, содержащий источник излучения с веерным пучком, сканер, осуществляющий рабочие перемещения объекта контроля, матрица детекторов, располагаемая в веерном пучке за объектом контроля, и блок управления и обработки информации, входы которого подключены к выходам детекторов и сканера, отличающийся тем, что в качестве детекторов матрицы детекторов используется микроматрица детекторов с единичными детекторами, размер которых вдоль направления сканирования составляет К-ю часть от ширины детектора матрицы, где К требуемый масштаб увеличения локальной томографии.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы для неразрушающего контроля материалов и изделий | |||
| / Справочник под ред | |||
| В.В.Клюева | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М: Машиностроение, 1986, с.399 - 401 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Адаменко А.А | |||
| Современные методы радиационной дефектоскопии | |||
| - Киев: Наукова Думка, 1984, с.193, 194. | |||
