Изобретение относится к контрольно-измерительной технике и предназначено для оценки качества деталей при их изготовлении и ремонте, а конкретно - дефектоскопии с использованием вычислительной томографии.
Известны способы томографического контроля, применяемые для дефектоскопии деталей и изделий, в которых производится получение ряда теневых проекций объекта контроля от источника излучения, их регистрация с последующей обработкой информации, полученной с детекторов [1]
Наиболее близким к предлагаемому по технической сущности является способ томографического контроля [2] заключающийся в том, что осуществляют сканирование веерным пучком от точечного источника излучения объекта контроля путем возвратно-поступательного перемещения и дискретного поворота объекта контроля, регистрацию интенсивности излучения, прошедшего через объект контроля с помощью матрицы детекторов и обработку в ЭВМ полученной информации с последующим восстановлением на ее основе внутренней структуры объекта.
Предложенный способ томографического контроля, заключается в том, что осуществляют сканирование веерным пучком от точечного источника излучения объекта контроля путем возвратно-поступательного перемещения и дискретного поворота объекта контроля, регистрацию интенсивности излучения прошедшего через объект контроля с помощью матрицы детектора и обработку в ЭВМ полученной информации с последующим восстановлением на ее основе внутренней структуры объекта, при этом предварительно задают местоположение и размеры интересующей локальной области внутри объекта контроля, вводят эту информацию в ЭВМ и осуществляют ускоренное сканирование объекта до момента пересечения локальной области крайним лучом веерного пучка, падающего на первый детектор матрицы, после чего проводят медленное сканирование с шагом сканирования, уменьшенным в k D/Dл раз, где D диаметр объекта контроля, а Dл диаметр локальной области, при этом время снятия отсчетов с детекторов уменьшают в k раз, причем при регистрации задействуется только часть детекторов матрицы, определяемое размером локальной области.
Использование этих новых признаков позволит получать более подробную томограмму заранее выбранной локальной зоны в объекте контроля.
Способ поясняется чертежом, где изображен вычислительный томограф, реализующий предложенный способ, включающий источник 1 излучения с веерным пучком 2, сканер 3, осуществляющий рабочие перемещения объекта 4 контроля, матрицу 5 детекторов 6, располагаемую в веерном пучке за объектом контроля и блок 7 управления и обработки информации, входы которого подключены к выходам детекторов 6 и сканера 3.
Предлагаемый способ осуществляется следующим образом.
Излучение от точечного источника 1 проходит через объект 4 контроля, перемещаемый сканером 3, осуществляющим возвратно-поступательное перемещение и дискретное вращение объекта контроля и попадает на многоканальную матрицу 5 детектора 6.
При достижении первыми детекторами границы интересующей локальной области, изменяются моменты взятия дискретных отсчетов с детектором, причем эти моменты устанавливаются в зависимости от размера локальной зоны. При этом задействуется только часть детекторов, определяемая диаметром локальной зоны. Таким образом, "шаг сбора информации" определяется в соответствии с k D/Dл, где D диаметр объекта контроля, а Dл диаметр локальной области, "k" определяется или априорно или в обычном режиме сканирования по полученной томограмме. Поскольку детекторы задействованы не все, то "угол видения" матрицы из фокуса источника сокращается и поэтому число дискретных угловых позиций объекта соответственно возрастает так, чтобы полный набор проекций был собран в угле 180o.
Скорость движения объекта устанавливается такой, чтобы осуществлялся набор детектором необходимого количества квантов излучения, прошедшего объект. Поскольку осуществляется набор всех тех же 512 отсчетов каждым детектором в пределах локальной зоны за один траверс, то соседние отсчеты берутся с перекрытием положения детекторов, так как исходный размер детекторов был рассчитан на режим нормальной томографии. Некоторое перекрытие данных ухудшает отношение сигнал/шум, однако позволяет выделить отсчеты и синтезировать локальную томограмму. При этом производится обработка измеренных отсчетов, учитывающих влияние конечной протяженности пространственно-частотной переходной характеристики, уменьшающая вклад соседних отсчетов в измеренную величину данного отсчета.
Если локальная зона расположена осесимметрично в центре сечения, то достаточно определить радиус локальной зоны и сканирование производить следующим образом: стол с объектом ускоренно перемещается до тех пор, пока луч пучка излучения в угле αNk не подойдет к краю локальной зоны. Тогда включается уменьшенная скорость такая, что время единичного сканирования локальной зоны равно времени единичного сканирования всего сечения в нормальном режиме, а отсчет производится в "k" раз чаще. Далее производится поворот объекта на угол aN и сканирование осуществляется в обратном направлении точно таким же образом и так далее. Если же локальная зона неосесимметрична, то управляющий компьютер должен для шага единичного сканирования вычислять положение точки, с которой начинается замедленное движение сканера, точки, когда оно кончается и получение проекционных данных, ибо для каждого единичного сканирования положение этой точки различно.
После набора полного пакета данных в угле 180o реконструкция томограммы локальной зоны с учетом вклада соседних отсчетов производится так же, как для нормального режима.
Предложенный способ был опробован на макете томографа и показал увеличение геометрического разрешения пропорциональное изменению масштаба шага сбора информации "k", равного отношению диаметра объекта контроля к диаметру локальной области в пределах k 1-5. При дальнейшем увеличении "k" происходит резкое ухудшение отношения сигнал/шум, что не позволяет получать качественные томограммы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ | 1994 |
|
RU2098795C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1994 |
|
RU2098801C1 |
| СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ | 1999 |
|
RU2180745C2 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО ИССЛЕДОВАНИЯ МИКРОСКОПИЧЕСКИХ ОБЪЕКТОВ И СКАНИРУЮЩИЙ МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413204C2 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ВЕСОВОГО СОДЕРЖАНИЯ КОМПОНЕНТОВ В ИЗДЕЛИИ | 1997 |
|
RU2122723C1 |
| РЕНТГЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1996 |
|
RU2098796C1 |
| ПРОДОЛЬНЫЙ РЕНТГЕНОВСКИЙ ТОМОГРАФ | 1998 |
|
RU2148816C1 |
| Способ вычислительной радиационной томографии | 1978 |
|
SU766264A1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ | 1996 |
|
RU2120122C1 |
| ПРОМЫШЛЕННЫЙ ТОМОГРАФ | 2014 |
|
RU2542600C1 |
Сущность изобретения: облучают объект контроля, перемещаемый сканером, веерным пучком излучения и регистрируют излучение, прошедшее через объект, с помощью матрицы детекторов. Для получения более подробной томограммы локальной области внутри объекта уменьшают количество задействованных детекторов матрицы, проводят медленное сканирование с шагом сканирования, уменьшенным в K = D/Dл, где D - размер объекта контроля, Dл - размер локальной области, а время снятия отсчетов с детекторов уменьшают в K раз. 1 ил.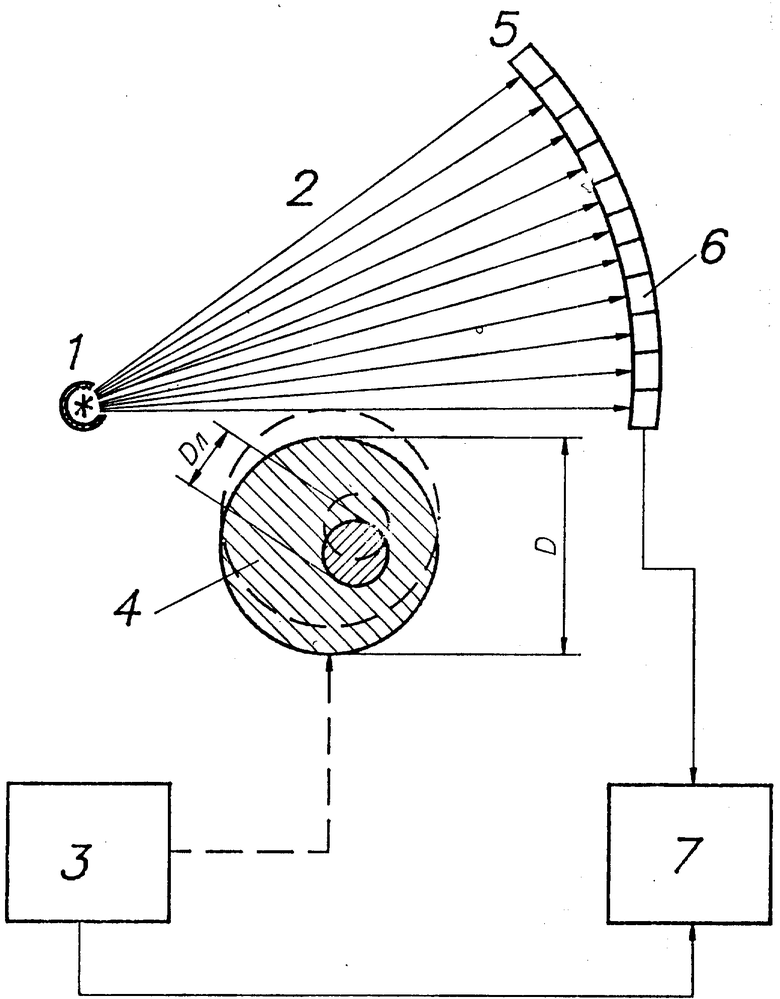
Способ томографического контроля, заключающийся в том, что осуществляют сканирование веерным пучком от точечного источника излучения объекта контроля путем возвратно-поступательного перемещения и дискретного поворота объекта контроля, регистрируют интенсивность излучения, прошедшего через объект контроля, с помощью матрицы детекторов и обрабатывают в ЭВМ полученную информацию с последующим восстановленим на ее основе внутренней структуры объекта, отличающийся тем, что предварительно задают местоположение и размер интересующей локальной области внутри объекта контроля, вводят эту информацию в ЭВМ и осуществляют ускоренное сканирование объекта до момента пересечения границей локальной области крайнего луча веерного пучка, падающего на первый детектор матрицы, после чего проводят медленное сканирование с шагом сканирования, уменьшенным в K D/Dл раз, где D размер объекта контроля, Dл размер локальной области, при этом время снятия отсчетов с детекторов уменьшают в K раз, причем при регистрации задействуется только часть детекторов матрицы, определяемая размером локальной области.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы для неразрушающего контроля материалов и изделий | |||
| Справочник / Под ред.В.В.Клюева | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Машиностроение, 1986, с.399 - 401 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Адаменко А.А | |||
| Современные методы радиационной дефектоскопии | |||
| - Киев: Наукова думка, 1984, с.193 и 194. | |||
