Изобретение относится к контрольно-измерительной технике и предназначено для оценки качества деталей при их изготовлении и ремонте, а конкретно к дефектоскопии с использованием вычислительной томографии.
Известны способы томографического контроля, применяемые для дефектоскопии деталей и изделий, в которых получают ряд теневых проекций объекта контроля от источника излучения, их регистрация с последующей обработкой информации, полученной с детекторов [1]
Наиболее близким к предлагаемому по технической сущности является способ вычислительной томографии [2] заключающийся в том, что пучок от точечного источника излучения направляют через объект контроля, совершающий сканирование на линейную матрицу детекторов, регистрируют интенсивность излучения в каждом из детекторов матрицы, обрабатывают полученную информацию в ЭВМ и восстанавливают внутреннюю структуру объекта контроля.
Однако способ имеет существенный недостаток: недостаточная точность из-за отсутствия нормировки сигналов, зарегистрированных в каждом из детекторов линейной матрицы, отличающихся друг от друга по чувствительности и дрейфу.
Задачей изобретения является повышение точности способа вычислительной томографии.
Цель достигается тем, в способе вычислительной томографии пучок от точечного источника излучения направляют через объект контроля, совершающий сканирование на линейную матрицу детекторов, регистрируют интенсивность излучения в каждом из детекторов матрицы, обрабатывают полученную информацию в ЭВМ и восстанавливают внутреннюю структуру объекта контроля, перед началом каждого цикла сканирования осуществляют нормировочные измерения, для чего производится поворот всей линейной матрицы детекторов на 90o относительно крайнего детектора в матрице таким образом, что матрица, находясь в пучке излучения источника, выходит из "тени" объекта контроля, регистрирует интенсивность излучения всеми детекторами матрицы и по полученным результатам в каждом детекторе корректируют каждый следующий получаемый результат измерения в рабочем цикле измерения.
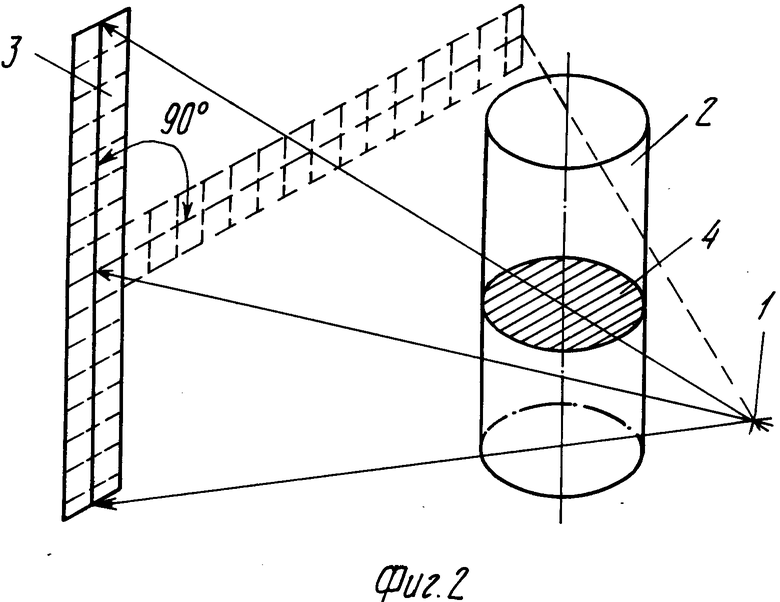
На фиг.1,2 изображены схемы работы вычислительного томографа в двух режимах: фиг.1 рабочий режим измерения; фиг.2 нормировка.
Предлагаемый способ осуществляется следующим образом.
Излучение от точечного источника 1 проходит через объект 2 контроля, перемещаемый сканером (не показан), осуществляющим возвратно-поступательное перемещение и дискретное вращение объекта контроля, и попадает на матрицу 3 детекторов, располагаемую в веерном пучке, проходящим через плоскость 4 просвечивания.
Перед началом каждого цикла сканирования сканер осуществляет нормировку, для чего осуществляют поворот всей линейной матрицы детекторов на 90o относительно крайнего детектора в матрице таким образом, что матрица, находясь в пучке излучения источника, выходит из "тени" объекта контроля, регистрируют интенсивности излучений, попадающих на каждый из детекторов матрицы и вводят эту информацию в память ЭВМ, затем матрица детекторов автоматически возвращается в рабочее положение и регистрируется интенсивность излучения, прошедшего через объект контроля в каждый из детекторов, эти результаты корректируются по результатам нормировки, хранящимся в памяти ЭВМ, и опять вводятся в ЭВМ для последующего создания томограммы.
Затем производятся следующие шаги сканирования, в которых осуществляют очередную нормировку, измерения и указанные выше операции корректировки, пока не закончится сканирование всего объекта контроля. По всем результатам сканирования, введенным в ЭВМ, после соответствующей их обработки, восстанавливают изображение внутренней структуры объекта контроля - томограмму.
Предложенный способ опробован на действующем макете радионуклидного томографа АЦ-3 в рамках НИР "Двина" для объектов авиатехники и показал увеличение точности за счет компенсации нестабильности пучка излучения, нестабильности чувствительности детекторов матрицы и дрейфа их свойств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ | 1994 |
|
RU2097748C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1994 |
|
RU2098801C1 |
| РЕНТГЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1996 |
|
RU2098796C1 |
| СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ ВЕСОВОГО СОДЕРЖАНИЯ КОМПОНЕНТОВ В ИЗДЕЛИИ | 1997 |
|
RU2122723C1 |
| СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ | 1999 |
|
RU2180745C2 |
| ПРОДОЛЬНЫЙ РЕНТГЕНОВСКИЙ ТОМОГРАФ | 1998 |
|
RU2148816C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ С НЕТОЧЕЧНЫМ ИСТОЧНИКОМ | 2006 |
|
RU2313780C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ | 1996 |
|
RU2120122C1 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 1996 |
|
RU2126978C1 |
| СПОСОБ БЕЗРАЗБОРНОГО ИЗМЕРЕНИЯ ЗАЗОРА В МЕХАНИЗМЕ ДВИГАТЕЛЯ | 1995 |
|
RU2095751C1 |
Использование: оценка качества деталей при их изготовлении и ремонте, а конкретно, дефектоскопия с использованием вычислительной томографии. Сущность изобретения: излучение от точечного источника проходит через объект контроля, перемещаемый сканером, осуществлящим возвратно-поступательное перемещение и дискретное вращение объекта контроля, и попадает на матрицу детекторов, располагаемую в веерном пучке, проходящем через плоскость просвечивания. Перед началом каждого цикла сканирования осуществляют нормировку, для чего поворачивают всю линейную матрицу детекторов на 90o относительно крайнего детектора в матрице, выводя ее из "тени" объекта контроля, и регистрируют интенсивности излучений, попадающих на каждый из детекторов матрицы, и вводят эту информацию в память ЭВМ. Затем матрицу детекторов автоматически возвращают в рабочее положение и регистрируют интенсивность излучения, прошедшего через объект контроля в каждый из детекторов. Эти результаты корректируют по результатам нормировки, хранящимся в памяти ЭВМ, и опять вводят в ЭВМ для последующего получения томограммы. 2 ил.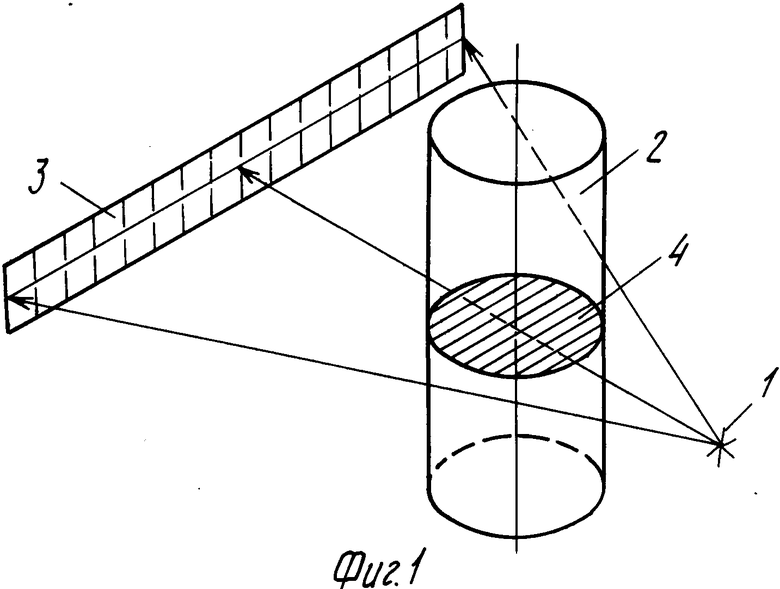
Способ вычислительной томографии, заключающийся в том, что пучок от точечного источника излучения направляют через объект контроля, совершающий сканирование, на линейную матрицу детекторов, регистрируют интенсивность излучения в каждом из детекторов матрицы, обрабатывают полученную информацию в ЭВМ и восстанавливают внутреннюю структуру объекта контроля, отличающийся тем, что перед началом каждого цикла сканирования осуществляют нормировочные измерения, для чего производится поворот всей линейной матрицы детекторов на 90o относительно крайнего детектора в матрице таким образом, что матрица, находясь в пучке излучения источника, выходит из "тени" объекта контроля, регистрируют интенсивность излучения всеми детекторами матрицы и по полученным результатам в каждом детекторе корректируют каждый следующий получаемый результат измерения в рабочем цикле сканирования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы для неразрушающего контроля материалов и изделий | |||
| Справочник/Под ред | |||
| Клюева В.В., т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Машиностроение, 1986, с | |||
| ПРИСПОСОБЛЕНИЕ, ЗАТРУДНЯЮЩЕЕ КРАЖУ ЭЛЕКТРИЧЕСКОЙ ЛАМПЫ | 1922 |
|
SU399A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| GB, заявка, 1283915, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
