Предлагаемое изобретение относится к области контроля технического состояния транспортных средств и может быть использовано при контроле технического состояния тормозных систем автотранспортных средств (АТС) в дорожных условиях, например при проведении периодических техосмотров по ГОСТ 25478-91.
Известен способ определения тормозного пути автомобиля с использованием устанавливаемого на период контроля инерционного датчика замедления, реализованный в устройстве [1] Недостатком известного способа является невысокая точность, обусловленная невозможностью точной установки инерционного датчика замедления относительно дорожного полотна при его установке на АТС, а также тем, что в отсутствие гироплатформы принципиально невозможно учесть колебания кузова автомобиля при торможении (приседание, раскачивание, кивок), существенно влияющие на точность измерения параметра.
Наиболее близким по технической сущности является используемый в доплеровских системах навигации воздушных транспортных средств способ определения скорости [2] знание которой и динамики ее изменения позволяет достаточно просто определить величину тормозного пути АТС. Способ предусматривает излучение сигнала по трем некомпланарным лучам антенной системы, прием отраженного от подстилающей поверхности сигнала, измерение доплеровской частоты в каждом направлении излучения.
Недостатком этого способа при применении к определению тормозного пути АТС является невысокая точность, обусловленная невозможностью точной установки чувствительного элемента (антенной системы) измерительной системы при его установке на автомобиль (требуемая точность установки антенной системы не превышает долей углового градуса см. стр. 155 [2]). Проведение же юстировки антенной системы относительно подстилающей поверхности в условиях оперативной работы при техосмотрах АТС крайне нежелательно из-за существенного увеличения времени контроля.
Задачей изобретения является повышение точности контроля и снижение временных затрат на его осуществление путем учета положения антенной системы относительно подстилающей поверхности непосредственно в процессе измерения тормозного пути АТС.
Сущность изобретения состоит в том, что в доплеровской измерительной системе осуществляют излучение зондирующего сигнала по трем некомпланарным лучам антенной системы, прием отраженного от подстилающей поверхности сигнала доплеровской частоты Fд в каждом направлении излучения. Отличительными признаками является то, что выделяют интервал времени от момента достижения автомобилем равномерного прямолинейного движения до момента начала торможения, затем, в любой момент в пределах выделенного интервала времени по измеренным ранее значениям доплеровских частот определяют углы ϑуст и γуст между подстилающей поверхностью и продольной и поперечной осями антенной системы соответственно. После момента начала торможения определяют текущие значения продольной составляющей скорости Vxj автомобиля, а тормозной путь Sт определяют после полной остановки автомобиля в соответствии с выражением:
где Δt интервал временной дискретизации,
j номер отсчета времени, в которое производится измерение текущего значения Fд в каждом направлении излучения,
N номер отсчета времени, соответствующего остановке автомобиля.
Кроме того углы ϑуст и γуст определяют из системы уравнений: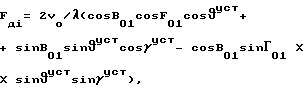
где Vo установившаяся скорость АТС до начала торможения при равномерном прямолинейном движении,
λ - длина волны излучаемого сигнала,
Boi, Гoi конструктивные углы системы в вертикальной и горизонтальной плоскостях соответственно,
i направление излучения (i=1,2,3).
Кроме того, текущие значения продольной составляющей скорости Vxj определяют в соответствии с системой уравнений:
где Vxj, VYj, VZj текучие значения соответственно продольной, вертикальной и поперечной составляющих вектора скорости в j-ый отсчет времени,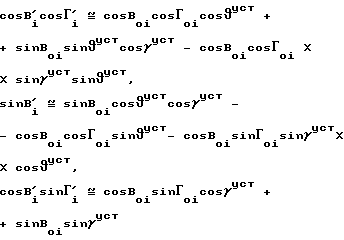
Наличие отличительных признаков предлагаемого решения относительно прототипа подтверждает соответствие решения критерию "новизна".
Изобретательский уровень предлагаемого решения состоит в разрешении технического противоречия между требованиями высокой точности измерения тормозного пути и сокращения времени контроля АТС. Указанное противоречие оставалось неразрешенным в виду отсутствия очевидных путей решения этой задачи.
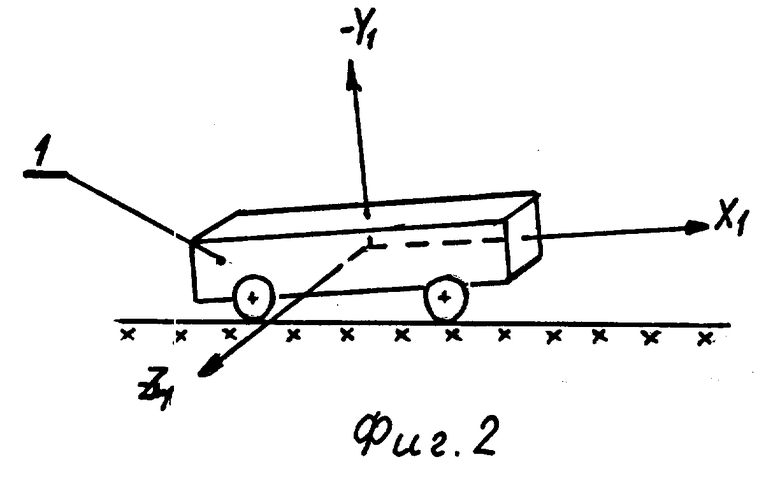
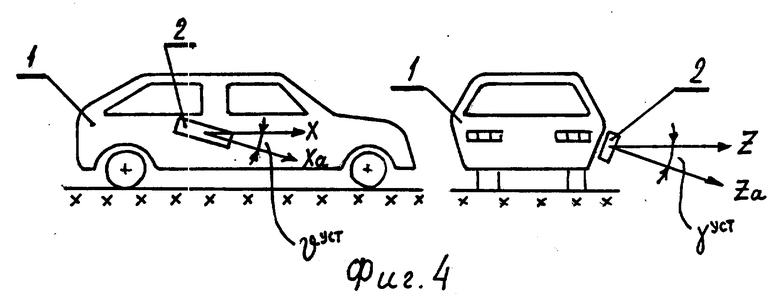
На фиг. 1 показаны; OXа продольная ось антенной системы; OYa вертикальная ось антенной системы; OZa поперечная ось антенной системы; B01, Г01 конструктивные углы в вертикальной и горизонтальной плоскостях соответственно первого антенного луча; В02, Г02 и В03, Г03 то же для второго и третьего антенных лучей; на фиг. 2 1 автомобиль; OX1 продольная ось автомобиля; OY1 вертикальная ось автомобиля; OZ1 поперечная ось автомобиля; на фиг. 3 OX, OY, OZ оси горизонтальной системы координат; на фиг. 4 2 антенная система,  угол между подстилающей поверхностью и продольной осью антенной системы, обусловленный неточностью установки антенной системы на автомобиль,
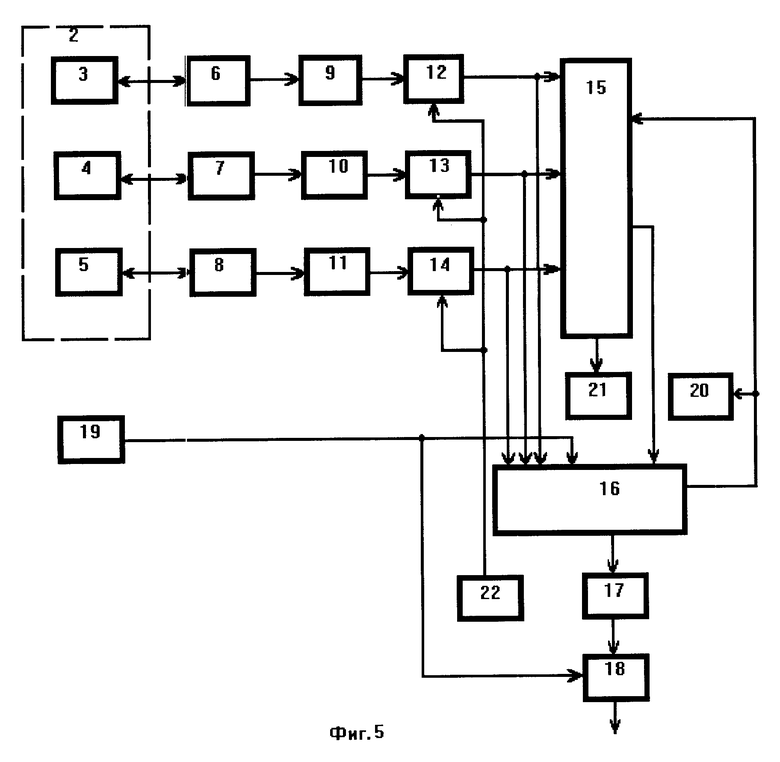
угол между подстилающей поверхностью и продольной осью антенной системы, обусловленный неточностью установки антенной системы на автомобиль,  угол между подстилающей поверхностью и поперечной осью антенной системы, обусловленный неточностью установки антенной системы на автомобиль; на фиг. 5 показаны: 3-5 приемо-передающие антенны; 6-8 - автодины; 9-11 усилители доплеровской частоты; 12-14 измерители доплеровской частоты; 15 первое вычислительное устройство; 16 второе вычислительное устройство; 17 устройство памяти; 18 третье вычислительное устройство; 19 датчик торможения; 20- первый индикатор; 21 второй индикатор; 22 таймер.
угол между подстилающей поверхностью и поперечной осью антенной системы, обусловленный неточностью установки антенной системы на автомобиль; на фиг. 5 показаны: 3-5 приемо-передающие антенны; 6-8 - автодины; 9-11 усилители доплеровской частоты; 12-14 измерители доплеровской частоты; 15 первое вычислительное устройство; 16 второе вычислительное устройство; 17 устройство памяти; 18 третье вычислительное устройство; 19 датчик торможения; 20- первый индикатор; 21 второй индикатор; 22 таймер.
Доплеровские навигационные системы основаны на использовании эффекта Доплера для измерения скорости.
Доплеровское изменение частоты Fдi излучаемого сигнала позволяет определить прямоугольную проекцию Vi вектора скорости V на направление луча антенной системы: vi= Fдiλ/2, где λ - длина волны излучаемого сигнала.
Так как в общем случае положение вектора V в пространстве определяется тремя проекциями, то необходимо иметь не менее трех независимых доплеровских частот. Условием их независимости является некомпланарность лучей антенной системы измерителя лучи не должны лежать в одной плоскости (см. 2.1 [2]).
Для пояснения принципа действия измерительной системы, реализующей предлагаемый способ, должны быть использовать три системы координат.
Одна система координат антенная. Определяется тремя взаимоперпендикулярными плоскостями, проходящими через продольную (OXа), поперечную (OZa и вертикальную (OYа) оси антенной системы. В этой системе координат определяются значения конструктивных углов антенной системы Вoi, Гoi (см. фиг.1).
Другая система координат связанная (связана с кузовом АТС). Определяется тремя взаимоперпендикулярными плоскостями, проходящими через продольную (ОХ1), поперечную (OZ1) и вертикальную (OY1) оси АТС (см. фиг.2). В этой системе координат определяются значения установочных углов антенной системы ϑуст и γуст (см. фиг.4).
Третья система координат горизонтальная. Предполагается, что ось ОХ этой системы координат совпадает с проекцией продольной оси АТС на горизонтальную плоскость (см. фиг.3).
В частном случае неподвижного АТС или равномерно прямолинейно движущегося АТС связанная и горизонтальная системы координат совпадают, в остальных случаях совпадение отсутствует.
В общем случае произвольной установки антенной системы измерительного устройства на АТС антенная и связанная системы координат также не совпадают, и с точностью до места установки могут совпасть лишь только в том случае, когда установочные углы ϑуст и γуст будут равны нулю (см. фиг.4)
Определение величины тормозного пути АТС должно осуществляться в горизонтальной системе координат.
Ниже приводятся математические зависимости, необходимые для реализации заявляемого способа.
Текущие значения доплеровских частот (Fdij) при произвольном движении АТС в каждом из трех каналов излучения-приема в общем виде могут быть представлены как (см. формулу 2.19 [2]):
где i направление излучения-приема (i 1, 2, 3),
j номера отсчетов времени, в которые производится измерение текущих значений Fд в каждом из i-ых направлений излучения-приема,
λ - длина волны излучаемого (зондирующего) сигнала,
VXj, VYj, VZj текущие значения продольной, вертикальной и поперечной составляющих вектора скорости в горизонтальной системе координат,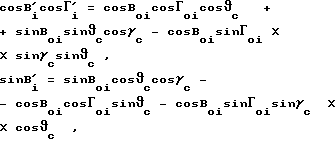

ϑc - угол между горизонтальной плоскостью и продольной осью антенной системы,
γc - угол между горизонтальной плоскостью и поперечной осью антенной системы.
В этих выражениях, если антенная и связанная системы координат совпадают, углы ϑc и γc являются углами тангажа и крена автомобиля соответственно. Если совпадают связанная и горизонтальная системы координат (при равномерном прямолинейном движении) углы ϑc и γc являются установочными углами антенной системы.
Принимая во внимание, что при равномерном прямолинейном движении VXj=VO и VXj=VZj=0, система уравнений (1) для такого случая может быть представлена в виде:
Из (3) могут быть определены значения углов ϑуст и γуст а также величина скорости (VO) установившегося равномерного движения.
Для повышения точности определения ϑуст и γуст можно применить операцию усреднения результатов вычислений этих углов по M измерениям Fdij в соответствии с выражениями:
где ϑ
При произвольном движении АТС вектор скорости сориентирован в пространстве произвольным образом. Это присуще, в частности, режиму торможения в величинах ϑc и γc выражений (2) кроме ϑуст и γуст дополнительно появляются dyc (например, "кивок" АТС) и δγc (покачивание кузова АТС в поперечной плоскости) соответственно. Выражения (2) быть тогда представлены в виде:
Решения системы (1) трех уравнений с использованием выражений (5) вместо (2) отсутствует, т. к. неизвестных в системе уравнений пять VXj, Vxj, VZj, δϑc, δγc.
В такой ситуации достаточно широко используется метод приравнивания нулю углов δϑc, δγc при их малых (до 20o) значениях (при дорожных испытаниях тормозных систем АТС это требование выполняется с запасом), и отнесения неточности определения из-за этого составляющих скорости на погрешность измерения системы (см. стр.40-42 [2]).
Тогда система уравнений (1) будет представлена в виде:
При решении системы уравнений (6) относительно Vxj и использовании очевидной зависимости
где Sт тормозной путь АТС,
Δt - интервал временной дискретизации (Δt = tj+1 - tj),
N номер отсчета времени, соответствующего остановке АТС, получается значение определяемого параметра.
При неизвестных значениях ϑуст и γуст оценку составляющих скорости VXj, VYj, VZj можно получить из системы уравнений: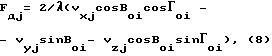
получающуюся из (6) при приравнивании ϑуст и γуст к нулю.
Последовательность действий при реализации предлагаемого способа измерения тормозного пути автомобиля следующая.
После установки антенной системы на испытываемое автотранспортное средство с известными значениями углов ϑуст и γуст осуществляют разгон автомобиля до некоторого установленного нормативными документами (например, ГОСТ 25478-91) значения и обеспечивают режим равномерного прямолинейного движения.
Измерительной доплеровской системой осуществляют излучение зондирующего сигнала по трем некомпланарным лучам антенной системы, причем отраженного от подстилающей поверхности (дорожного полотна) сигнала и измерение доплеровской частоты в каждом направлении излучения.
До момента начала торможения из системы уравнений (3) и (при необходимости) с использованием формул (4) определяют значения установочных углов ϑуст и γуст между подстилающей поверхностью и продольной и поперечной осями антенной системы соответственно.
Особым требованием при проведении контроля является выдерживание равномерного прямолинейного движения АТС от момента времени, соответствующего достижению режима равномерного прямолинейного движения, до момента времени, соответствующего началу торможения. Внутри данного выделенного интервала времени осуществляют определение значений установочных углов ϑуст и γуст (этот отрезок времени составляет единицы секунд).
После момента начала торможения определяют текущие значения продольной составляющей скорости автотранспортного средства в горизонтальной системе координат в соответствии с системой уравнений (6).
После полной остановки автомобиля в соответствии с выражением (7) определяют тормозной путь.
Сигналом для начала определения углов ϑуст и γуст может быть, например, команда, формируемая водителем АТС при визуальном контроле за спидометром автомобиля, либо команда, формируемая измерительной системой автономно путем измерения доплеровских частот Fdi и решения системы уравнений (8).
Пример реализации способа определения тормозного пути представлен блок-схемой, приведенной на фиг.5.
Устройство для определения тормозного пути содержит три радиотехнических канала, каждый из которых состоит из последовательно включенных приемо-передающей антенны 3 (4, 5), (антенны ориентированы в пространстве некомпланарно, например, вперед по направлению движения АТС, в противоположном направлении и под некоторым углом к направлению движения), автодина 6 (7, 8), усилителя 9 (10, 11) доплеровской частоты и измерителя 12 (13, 14) доплеровской частоты. Выходы каждого из радиотехнических каналов соединены соответственно с первыми, вторыми и третьими с входами первого и второго вычислительных устройств (15, 16). Первый выход первого вычислительного устройства (15) соединен с четвертым входом второго вычислительного устройства (16). Первый выход второго вычислительного устройства (16) соединен с устройством (17) памяти, которое своим выходом подключено к первому входу третьего вычислительного устройства (18). Пятый вход второго вычислительного устройства (16) и второй вход третьего вычислительного устройства (18) соединены с датчиком (19) торможения, второй выход второго вычислительного устройства (16) соединен с четвертым входом первого вычислительного устройства (15) и первым индикатором (20), а второй выход первого вычислительного устройства (15) подключен к второму индикатору (21). К вторым входам измерителей (12, 13, 14) доплеровской частоты подключен таймер (22). В памяти первого и второго вычислительных устройств (15 и 16) "защиты" значения конструктивных углов (В0i и Г0i) антенной системы и длина волны излучаемого сигнала. В памяти третьего вычислительного устройства (18) "зашито" значение интервала (Δt) временной дискретизации.
Устройство работает следующим способом.
Автодины (6, 7, 8) осуществляют генерацию высокочастотных зондирующих сигналов, которые излучаются антеннами (3, 4, 5), и образование сигналов, отраженных от подстилающей поверхности, в сигналы доплеровской частоты Fд1, Fд2, Fд3. В усилителях (9, 10, 11) доплеровской частоты принятые сигналы усиливаются и поступают на первые входы измерителей (12, 13, 14) доплеровской частоты, на вторые входы которых поступает сигнал от таймера (22). В момент поступления сигнала от таймера (22) производится измерение доплеровских частот Fд1, Fд2, Fд3 в каждом из трех радиотехнических каналов.
Выходной сигнал таймера (22) представляет собой импульсную последовательность, период повторения импульсов в которой равен требуемому интервалу (Δt) временной дискретизации.
Второе вычислительное устройство (16), решая систему уравнений (8), определяет момент времени, когда скорость АТС достигает после разгона заданного значения, и формирует сигнал разрешения первому вычислительному устройству (15) приступить к определению установочных углов ϑуст и γуст. Условием формирования такого сигнала является достижение скорости автомобиля некоторого установленного значения, а также повторяемость результатов измерения скорости в течение нескольких периодов импульсной последовательности, формируемой таймером (22), что является признаком установившегося равномерного движения АТС. Кроме того, при формировании вторым вычислительным устройством (16) сигнала разрешения включается первый индикатор (20), сигнализирующий водителю о том, что разгон завершен и необходимо выдерживать равномерное прямолинейное движение.
Первое вычислительное устройство (15) определяет углы ϑуст и γуст из системы уравнений (3), используя формулу (4) и результаты измерений значений доплеровских Fд1, Fд2, Fд3 в трех радиотехнических каналах, и по завершении определения ϑуст и γуст выдает их значения во второе вычислительное устройство (16), а также включает второй индикатор (21), сигнализирующий водителю о разрешении начала торможения.
Методическим требованием при проведении испытаний является выдерживание на интервале времени от включения первого индикатора (20) до включения второго индикатора (21), длящемся 1 2 сек, равномерного прямолинейного движения.
При нажатии тормозной педали автомобиля срабатывает датчик (19) торможения, выходной сигнал которого поступает во второе вычислительное устройство (16), разрешая определять текущие значения скорости автомобиля в соответствии с системой уравнений (6). Текущие значения продольной составляющей вектора скорости Vxj с выхода второго вычислительного устройства (16) передаются в устройство (17) памяти.
При полной остановке АТС и снятии усилия с тормозной педали выключается сигнал с выхода датчика (19) торможения. Выключение этого сигнала воспринимается третьим вычислительным устройством (18) как информация о завершении процесса измерения и с этого момента оно определяет, используя массив текущих значений скорости Vxj, хранящихся в устройстве (17) памяти, тормозной путь АТС в соответствии с выражением (7).
Датчик (19) торможения может быть выполнен, например, в виде концевого выключателя, присоединенного к тормозной педали АТС, а измеритель (12, 13, 14) доплеровской частоты по любой из схем, приведенных в главе 7 [2]
Литература
1. Отсчет по теме "Разработка комплекса из 15 базовых организационных и нормативных документов системы госконтроля технического состояния транспортных средств, реализующих "Положение о проведении контроля технического состояния автотранспортных средств и прицепов в Российской Федерации", утвержденного Минтрансом России, МВД и Госстандартом России" (стр.124), ГосНИИАТ, Москва, ул. Героев Панфиловцев, 24 (тел.496-93-23). Отсчет утвержден 5.12.95.
2. В.Е. Колчинский и др. Доплеровские устройства и системы навигации, М. Советское радио, 1975.

Предлагаемое изобретение относится к области контроля технического состояния транспортных средств и может быть использовано при контроле технического состояния тормозных систем автотранспортных средств (АТС) в дорожных условиях. Задачей изобретения является повышение точности контроля и снижение временных затрат на его осуществление путем учета положения антенной системы относительно поверхности непосредственно в процессе измерения тормозного пути АТС. Сущность изобретения состоит в том, что в доплеровской измерительной системе осуществляют излучение зондирующего сигнала по трем некомпланарным лучам антенной системы, прием отраженного от подстилающей поверхности сигнала и измерение доплеровской частоты Fд в каждом направлении излучения. Отличительными признаками является то, что выделяют интервал времени до момента начала торможения, затем в любой момент в пределах выделенного интервала времени по измеренным ранее значениям доплеровских частот определяют узлы ϑуст и γуст между подстилающей поверхностью и продольной и поперечной осями антенной системы соответственно. После момента начала торможения определяют текущие значения продольной составляющей скорости Vxj автомобиля, а тормозной путь Sт определяют после полной остановки автомобиля в соответствии с выражением:
где Δt - - интервал временной дискретизации, j - номер отсчета времени, в которое производится измерение текущего значения Fд в каждом направлении излучения, N - номер отсчета времени, соответствующего остановке автомобиля. 2 з.п. ф-лы, 5 ил.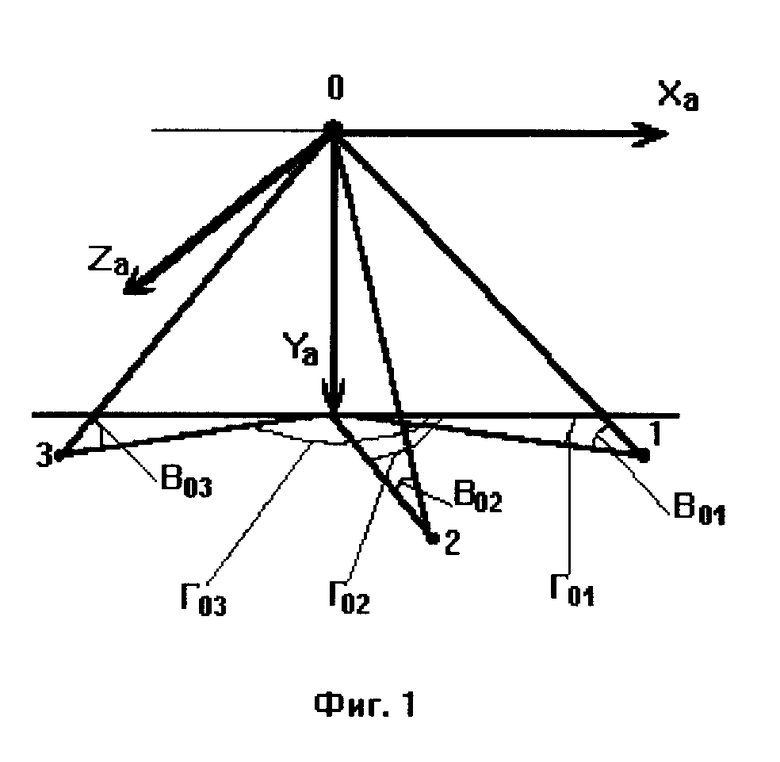
где Δt - интервал временной дискретизации;
j номер отсчета времени, в которое производится измерение текущего значения Fд в каждом направлении излучения;
N номер отсчета времени, соответствующего остановке АТС.
где V0 установившаяся скорость АТС до начала торможения при равномерном прямолинейном движении;
λ - длина волны излучаемого сигнала;
В0iГ0i - конструктивные углы антенной системы в вертикальной и горизонтальной плоскостях соответственно;
i направление излучения (i 1,2,3).
где Vx j, Vy j, Vz j текущие значения соответственно продольной, вертикальной и поперечной составляющих вектора скорости в j-й отсчет времени;

 A
A
| Колчинский В.Е., Мандуровский И.А., Константиновский М.И | |||
| Доплеровские устройства и системы навигации | |||
| - М.: Сов радио, 1975, с.19 - 25. |
