Изобретение относится к комплексным моделирующим устройствам, используемым при проектировании и испытании беспилотных летательных аппаратов (БПЛА) с радиолокационным визиром.
Известен испытательный стенд по патенту РФ №2263869 на изобретение, МПК F41G 3/26, G09B 9/08, опубл. 10.11.2005 г. Стенд содержит радиолокационный визир (РЛВ), динамический стенд воспроизведения углового движения РЛВ и радиоимитатор цели, который содержит две платформы, симметрично расположенные по обе стороны направляющей полусферы и прижатые магнитным притяжением друг к другу. Траекторию движения платформ по поверхности полусферы определяет блок управления. На платформе, расположенной на внутренней стороне полусферы, расположен излучатель сигнала, излучающий сигнал в стороны антенны РЛВ, которая принимает излученный сигнал и с помощью динамического стенда, воспроизводящего угловое движение РЛВ, отслеживает перемещение излучателя сигнала.
Недостатком известного стенда является ограниченный объем исследований, не позволяющий воспроизводить реальные условия полета летательного аппарата.
Известен стенд полунатурного моделирования системы самонаведения летательного аппарата (ЛА) по патенту РФ №2338992, МПК F41G 3/32, F41G 7/22, опубл. 20.11.2008 г. Стенд содержит излучатель сигналов (имитатор цели), головку самонаведения (ГСН) и вычислительно-моделирующее устройство. Головка самонаведения, содержащая бортовую цифровую вычислительную машину (БЦВМ), и имитатор цели зафиксированы на неподвижных основаниях так, что продольная ось излучателя совмещена с продольной осью ГСН. Вычислительно-моделирующее устройство содержит блоки модели динамики и движения летательного аппарата, модели движения цели, модели движения гиростабилизированной платформы ГСН, модели управления гиростабилизированной платформой, модели расчета единичного вектора «ЛА-цель». Стенд позволяет в реальном масштабе времени производить полунатурное моделирование системы самонаведения ЛА во всем диапазоне угловых скоростей линии визирования без искажения динамики контура системы.
Недостатком известного аналога является невозможность моделирования многоцелевой обстановки в условиях воздействия на летательный аппарат естественных и искусственных помех.
Наиболее близким аналогом, принятым за прототип предлагаемого изобретения, является система прогнозирования результатов натурных испытаний по патенту РФ №2163387, МПК G05D 1/08, G09B 9/00, опубл. 20.02.2001 г.
Система по прототипу содержит пульт управления, имитатор эхо-сигнала, соединенный с электромеханическим имитатором движения целей, который содержит излучатель (рупорную антенну), установленный на первом подвижном основании (каретке), штатную аппаратуру, включающую блок рулей, радиолокационный визир, измерители углов и линейных ускорений и датчики угловых скоростей, а также устройство имитации БПЛА и внешних условий полета, в состав которого входят имитатор движения БПЛА, блок выработки сигналов управления, имитатор радиовысотомера и подстилающей поверхности и имитатор упругости. Штатная аппаратура размещена на двух динамических стендах, с помощью которых воспроизводятся угловые развороты БПЛА в процессе полета.
Недостатком устройства по прототипу является ограниченный круг задач, отрабатываемых в процессе моделирования пуска БПЛА, и невысокая достоверность полученных в результате моделирования данных.
Размещение реальной аппаратуры на двух динамических стендах подразумевает разделение задач моделирования на продольную и боковую, что в увеличивает необходимое количество проводимых испытаний.
Отсутствуют динамические стенды, позволяющие имитировать сближение с группой объектов наблюдения, что не позволяет отрабатывать этап целераспределения, отсутствует возможность проведения испытаний в условиях действия искусственных и естественных помех.
Техническим результатом изобретения является повышение достоверности моделирования системы управления БПЛА в условиях многоцелевой фоновой обстановки при воздействии искусственных и естественных помех.
Сущность изобретения заключается в том, что устройство полунатурного моделирования системы управления беспилотным летательным аппаратом (БПЛА) с радиолокационным визиром, содержащее пульт управления, радиолокационный визир (РЛВ), имитатор эхо-сигнала, электромеханический имитатор движения целей, содержащий первую рупорную антенну, установленную на первом подвижном основании, а также устройство имитации БПЛА и внешних условий полета, соединенное с радиолокационным визиром и пультом управления, дополнительно содержит многоканальный делитель мощности, вход которого соединен с выходом имитатора эхо-сигнала, имитатор сигнала помехи, выход которого через управляемый аттенюатор сигнала помехи соединен с первой рупорной антенной электромеханического имитатора движения целей, кроме этого, в устройство введены группа блоков задержки, группа фазовых модуляторов, группа имитаторов доплеровского сдвига частоты и группа блоков управляемых аттенюаторов по количеству дополнительных подвижных оснований, введенных в электромеханический имитатор движения целей, на каждом из которых установлены по меньшей мере по две рупорные антенны, входы которых через соответствующие аттенюаторы соответствующих блоков управляемых аттенюаторов соединены с выходами соответствующих имитаторов доплеровского сдвига частоты, входы которых соединены с выходами соответствующих фазовых модуляторов, первые входы которых соединены с выходами многоканального делителя мощности, а вторые - с выходами соответствующих блоков задержки, при этом выход опорного сигнала сверхвысокой частоты радиолокационного визира соединен с информационным входом имитатора эхо-сигнала, а его выходы, на которых формируются коды амплитудной модуляции и фазовой манипуляции, соединены с первыми и вторыми входами блоков задержки, третьи входы которых соединены с выходами пульта управления, на которых формируются коды задержки эхо-сигналов, кроме этого, радиолокационный визир установлен на трехстепенном динамическом стенде, который вместе с оборудованием электромеханического имитатора движения целей помещен в безэховую камеру, управляющие входы приводов трехстепенного динамического стенда и приводов подвижных оснований электромеханического имитатора движения целей, а также управляющие входы блоков управляемых аттенюаторов, управляемого аттенюатора сигнала помехи и управляющий вход имитатора эхо-сигнала соединены с соответствующими выходами пульта управления.
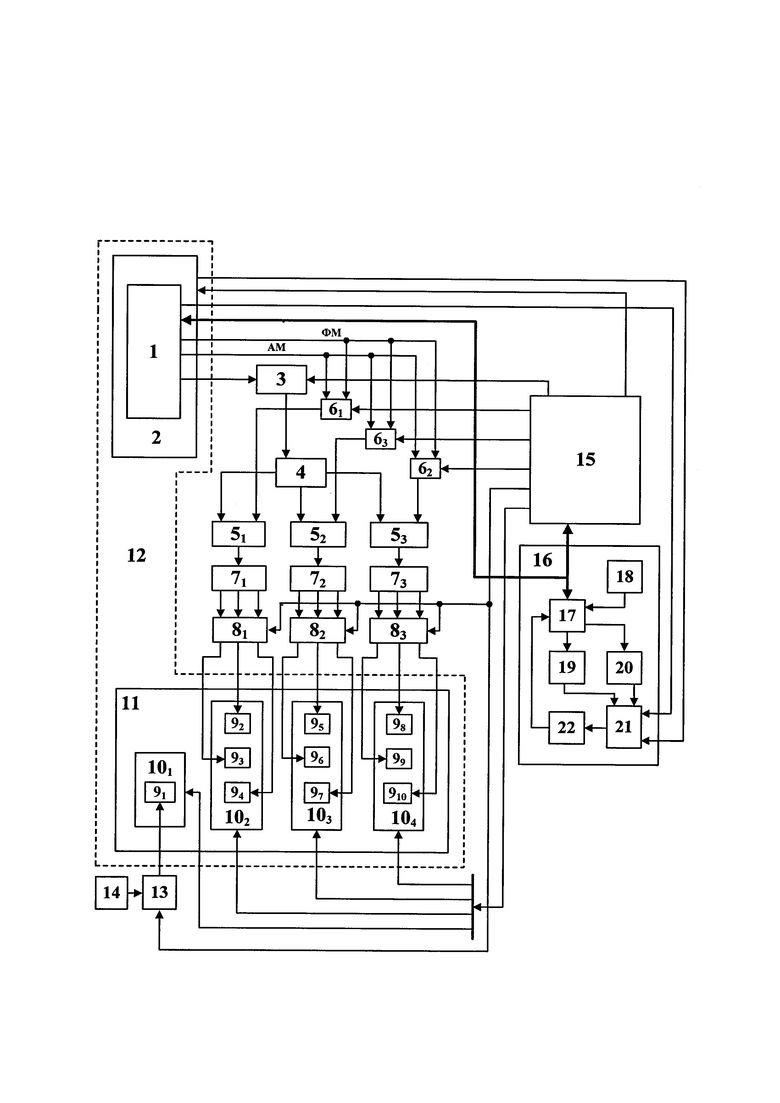
Сущность изобретения поясняется дальнейшим описанием и чертежом структурно-функциональной схемы устройства полунатурного моделирования системы управления БПЛА, на которой обозначены:
1 - радиолокационный визир с бортовой цифровой вычислительной машиной (БЦВМ) (далее по тексту радиолокационный визир),
2 - трехстепенной динамический стенд-качалка (далее по тексту трехстепенной динамический стенд),
3 - имитатор эхо-сигнала,
4 - многоканальный делитель мощности,
51, 52, 53 - фазовые модуляторы,
61, 62, 63 - блоки задержки,
71, 72, 73 - имитаторы доплеровского сдвига частоты,
81, 82, 83 - блоки управляемых аттенюаторов,
91, 92, …, 910 - излучатели сигналов, выполненные, например, в виде рупорных антенн,
101, 102, 103, 104 - подвижные основания, выполненные в виде кареток, перемещаемых посредством приводов по направляющей,
11 - электромеханический имитатор движения целей,
12 - безэховая камера, выполненная в виде помещения, обшитого радиопоглощающим материалом,
13 - управляемый аттенюатор сигнала помехи,
14 - имитатор сигнала помехи,
15 - пульт управления,
16 - устройство имитации БПЛА и внешних условий полета,
17 - имитатор движения БПЛА,
18 - имитатор ветровых порывов,
19 - имитатор упругости,
20 - имитатор радиовысотомера и подстилающей поверхности,
21 - блок выработки сигналов управления,
22 - имитатор рулей.
В состав оборудования устройства полунатурного моделирования системы управления БПЛА входит штатная аппаратура радиолокационного визира 1, установленная на трехстепенном динамическом стенде 2, и электромеханический имитатор 11 движения целей, помещенные в безэховую камеру 12, а также электронное оборудование, размещенное вне камеры.
Радиолокационный визир 1 представляет собой моноимпульсную радиолокационную систему со сложным, перестраиваемым по частоте и параметрам модуляции импульсным зондирующим сигналом, которая содержит передающее и приемное устройства, антенну и БЦВМ, управляющую работой РЛВ и осуществляющую обработку принятых антенной эхо-сигналов от объектов наблюдения (целей). Одним из возможных примеров реализации РЛВ является описание изобретения к патенту РФ №2207613, МПК G05D 1/12, G01S 13/42, опубл. 27.06.2003 г.
Трехстепенной динамический стенд 2 предназначен для воспроизведения угловых разворотов радиолокационного визира 1, имитирующих развороты БПЛА в процессе полета, выполнен в виде опорно-поворотного механизма, оснащенного электродвигателями углового разворота опорной платформы, на которой установлен РЛВ 1, в трех плоскостях (по углам азимута, крена и тангажа), а также цифровыми датчиками, измеряющими углы и скорости углового разворота платформы, и оптическими концевыми выключателями. Управляющие входы приводов стенда 2 соединены с соответствующими выходами (обозначены одной линией связи) пульта 15 управления.
Выход опорного СВЧ сигнала РЛВ 1 соединен с информационным входом имитатора 3 эхо-сигнала, техническая реализация которого известна, например из кн. Тверской Г.Н., Терентьев Г.К., Харченко И.П. Имитаторы эхо-сигналов судовых радиолокационных станций. - Л.: Судостроение, 1973 г. Управляющий вход имитатора 3 по сигналу включения соединен с соответствующим выходом пульта 15 управления, а его выход подключен к входу многоканального делителя 4 мощности, выходы которого соединены с первыми входами соответствующих фазовых модуляторов 51, 52, 53.
Выходы РЛВ 1, на которых формируются коды амплитудной модуляции (AM) и фазовой манипуляции (ФМ), соединены с первыми и вторыми входами блоков 61, 62, 63 задержки, третьи входы которых соединены с соответствующими выходами пульта 23 управления, на которых формируются коды задержки имитируемых эхо-сигналов целей. Выходы блоков 61, 62, 63 задержки соединены со вторыми входами фазовых модуляторов 51, 52, 53, к выходам которых подключены входы соответствующих имитаторов 71, 72, 73 доплеровского сдвига частоты. Техническая реализация имитаторов 7 известна, например, из описания изобретения к патенту РФ №2169279, МПК G01S 7/40, опубл. 20.06.2001 г.
Выходы имитаторов 71, 72, 73 доплеровского сдвига частоты подключены к соответствующим входам блоков 81, 82, 83 управляемых аттенюаторов, управляющие входы которых соединены с соответствующим выходом пульта 15 управления, а выходы соединены волноводно-коаксиальными переходами с рупорными антеннами 92, 93, …, 910 электромеханического имитатора 11 движения целей.
Электромеханический имитатор 11 движения целей выполнен в виде фермы, которая закреплена на каркасе, вмонтированном в пол безэховой камеры 12. На ферме закреплено П-образное монтажное устройство с установленной на нем направляющей для движения подвижных оснований 101, 102, 103, 104, выполненных в виде кареток, и зубчатой рейкой. На каретках 101, 102, 103, 104, оснащенных электродвигателями, редукторами, цифровыми датчиками угловых положений и оптическими концевыми выключателями, установлены рупорные антенны 91, 92, …, 910. Направляющая расположена перпендикулярно оси радиолокационного визира 1 на расстоянии, где обеспечивается плоский фронт волны в раскрыве антенны РЛВ.
Управляющие входы приводов кареток 101, 102, 103, 104 соединены с соответствующим выходом пульта 15 управления. Первая рупорная антенна 91, предназначенная для излучения помеховых сигналов, связана волноводно-коаксиальным переходом с имитатором 14 сигнала помехи (некогерентного сигнала) через управляемый аттенюатор 13 сигнала помехи, управляющий вход которого соединен с соответствующим выходом пульта 15. Пример реализации имитатора некогерентного сигнала рассмотрен в описании изобретения к патенту РФ №2193214, МПК G01S 7/38, опубл. 20.11.2002 г.
Пульт 15 управления выполнен на базе персонального компьютера, работающего под управлением операционной системы реального времени QNX 4.25 и специализированного программного обеспечения (ПО), оснащен платой аналого-цифрового преобразования и релейной платой.
Устройство 16 имитации БПЛА и внешних условий полета, выполненное на базе персонального компьютера, работающего под управлением операционной системы реального времени QNX 4.25 и специализированного ПО, содержит имитатор 17 движения БПЛА, соединенный интерфейсной магистралью с пультом 15 управления и БЦВМ радиолокационного визира 1. Второй и третий входы имитатора 17 движения БПЛА соединены с выходами имитатора 18 ветровых порывов и имитатора 22 рулей. Выход имитатора 17 по сигналу высота полета соединен с имитатором 20 радиовысотомера, а выходы по сигналам линейных ускорений (обозначены одной линией связи) соединены с имитатором 19 упругости, выход которого и выход имитатора 20 радиовысотомера соединены с соответствующими входами блока 21 выработки сигналов управления, выход которого соединен с имитатором 22 рулей. Третий вход блока 21 выработки сигналов управления соединен с выходами радиолокационного визира (обозначены одной линией связи), на которых формируются сигналы углового положения цели по азимуту и углу места. Четвертый вход блока 21 выработки сигналов управления соединен с выходами трехстепенного динамического стенда 2 (обозначены одной линией связи), на которых формируются текущие значения углового положения РЛВ 1 по курсу, крену и тангажу и текущие значения скоростей изменения этих углов. Техническая реализация имитатора 17 движения БПЛА, блока 21 выработки сигналов управления и других имитаторов, входящих в состав устройства 16, известна из уровня техники и рассмотрена, например, в описании изобретения к патенту РФ №2163387, являющемуся прототипом предлагаемого устройства полунатурного моделирования.
Устройство работает следующим образом.
Для проведения высокоточных измерений радиоэлектронной аппаратуры, антенной техники и испытаний технических средств на электромагнитную совместимость вся исследуемая аппаратура помещается в безэховую камеру 12. Камера обеспечивает получение достоверных результатов измерений в обстановке сильного электромагнитного зашумления естественным и техногенным электромагнитным фоном, а также может использоваться как дополнительное средство защиты информации.
Радиолокационный визир 1, содержащий БЦВМ, фиксируется на трехстепенном динамическом стенде-качалке 2, излучатели 91, 92, …, 910 сигналов (рупорные антенны) устанавливаются на подвижные основания 101, 102, 103, 104, которые перемещаются по направляющей в зоне раскрыва антенны РЛВ 1.
По команде оператора с пульта 15 управления включается питание от источников питания на аппаратуру комплекса. По заранее заготовленному сценарию, включающему в себя информацию о координатах объектов наблюдения (дальность, высота, скорость) и некоторых режимах работы БПЛА, таких как дальность включения РЛВ, имитатор 17 движения БПЛА начинает передавать по интерфейсной магистрали в БЦВМ РЛВ 1 и в пульт 23 управления траекторную информацию, включающую скорость полета, дальность до объекта наблюдения, координаты БПЛА в нормальной земной системе координат, угловое положение БПЛА и др., тем самым имитируя полет БПЛА по траектории.
Динамический стенд 2 отрабатывает углы, задаваемые с пульта 23 управления, имитируя процесс движения БПЛА. На этом этапе положение БПЛА в пространстве определяется системой известных дифференциальных уравнений, которая в реальном масштабе времени программно реализуется имитатором 17. В процессе моделирования величины, характеризующие пространственное положение БПЛА, суммируются с малыми величинами, поступающими из имитатора 19 упругости, имитирующего изгибные колебания корпуса БПЛА, имитатора 18 ветровых порывов. Высота полета над подстилающей поверхностью имитируется имитатором 20 радиовысотомера.
В момент времени, обусловленный содержанием полетного задания, с выходов РЛВ 1 начинают поступать опорный СВЧ сигнал и сигналы кодовой последовательности амплитудной и фазовой модуляции. Далее сигналы AM, ФМ корректируются блоками 61, 62, 63 задержки, которые осуществляют запоминание сигналов модуляции в каждом периоде зондирования и формируют сигналы амплитудной и фазовой модуляции, задержанные относительно входного сигнала на заданную величину задержки. С помощью пульта 15 управления осуществляется автоматическое уменьшение величины задержки на величину, записанную в регистр каждого из блоков задержки. Скорость изменения кода задержки может лежать в пределах 0…2 мкс/мс с шагом (30.52 пс/мс), при этом величина задержки изменяется с дискретом 31.25 нс.
Опорный СВЧ сигнал РЛВ 1 поступает на вход усилителя мощности имитатора эхо-сигнала 3 и после усиления поступает на вход многоканального (в рассматриваемом примере трехканального) делителя 4 мощности, откуда выходят три равных по мощности сигнала fe. Далее усиленные СВЧ сигналы fc модулируются сигналами амплитудной и фазовой модуляции с выходов блоков 61, 62, 63 задержки в модуляторах 51, 52, 53 и поступают в имитаторы 71, 72, 73 доплеровского сдвига частоты, а затем попадают на соответствующие аттенюаторы блоков 81, 82, 83 аттенюаторов, управляемых сигналами с АЦП пульта 15 управления. Это обеспечивает изменение мощности сигналов объектов наблюдения в соответствии с основным уравнением радиолокации, исходя из текущей счисляемой дальности, которая передается в пульт 15 из имитатора 17 движения БПЛА по интерфейсной магистрали.
Кроме того, изменяя начальный уровень ослабления сигналов, можно имитировать разницу в эффективной поверхности рассеяния объектов наблюдения. Код управления аттенюаторами и коды текущей дальности формируются управляющей программой пульта 15.
Далее по волноводно-коаксиальным переходам имитируемые эхо-сигналы попадают в безэховую камеру 12 на рупорные антенны 92, 93, …, 910, установленные на подвижных основаниях 102, 103, 104. С рупоров задержанные сигналы излучаются в направлении антенны РЛВ 1, которая улавливает их.
Сигналы от имитатора 14 помехи подаются в безэховую камеру на рупорную антенну 91. В зависимости от вида имитируемых помех производится предварительная настройка электронного пуска, что на практике означает комбинацию различных радиотехнических устройств, для имитации воздействия определенного вида помехи. В описываемом устройстве применяется имитатор шумовой заградительной помехи (Δfп>>Δfc), но включив в волноводный тракт сигнала помехи узкополосный фильтр, можно имитировать действие так называемой прицельной по частоте помехи (Δfп≈Δfc). Если включить в состав имитируемой помехи дополнительный блок задержки, то можно имитировать так называемую помеху, уводящую по дальности.
В предлагаемом устройстве в качестве примера используются три блока 61, 62, 63 задержки, что позволяет имитировать группу целей, каждая из которых находится в одном из трех квантов дальности. При необходимости, количество блоков задержки на каждую имитируемую цель может быть увеличено. Это повысит стоимость проводимых испытаний, но в свою очередь увеличит количество возможных комбинаций при имитации объектов наблюдения.
Сигналы, принятые антенной РЛВ 1, поступают сначала в приемное устройство, а из него в устройство обработки сигналов, которое в соответствии с заложенными в него алгоритмами выбирает из множества объектов наблюдения истинную цель. Таким образом в зависимости от внутренних алгоритмов исследуемой аппаратуры устройство полунатурного моделирования обеспечивает возможности варьирования фоно-целевой обстановки и отработки актуальных задач целераспределения и помехозащищенности исследуемой аппаратуры.
В процессе имитируемого пуска БЦВМ РЛВ 1 вырабатывает сигналы ψ, υ, характеризующие угловое положение цели в пространстве относительно РЛВ 1, которые отрабатываются на трехстепенном динамическом стенде 2. При сближении с объектами наблюдения в соответствии с известными законами каретки 10, перемещающие рупорные антенны 11, имитируют сближение БПЛА с множеством объектов наблюдения, т.е. многофоноцелевую обстановку.
Через время, соответствующее встрече БПЛА и объекта наблюдения, по сигналу с пульта 15 управления система останавливается, и оператором пульта на экране монитора фиксируется величина промаха в горизонтальной и вертикальной плоскостях, а также другие параметры, зависящие от программы испытаний, по которым делаются выводы о качестве системы, ее работоспособности и прогнозы на результаты натурных испытаний.
Таким образом, преимущества предлагаемого устройства полунатурного комплексного моделирования заключаются в следующем.
В заявленном устройстве может быть задействовано несколько целей при одновременном действии искусственных и (или) естественных помех. Угловые отклонения БПЛА в процессе полета и наведения на объект наблюдения имитируются трехстепенным динамическим стендом-качалкой. Имитатор эхо-сигнала выполнен с использованием только одного генератора сигнала, при этом имитируемые цели различаются своими ЭПР и доплеровским сдвигом, что позволяет решать задачи целераспределения. В состав оборудования включен имитатор помех, что позволяет решать задачи помехозащищенности испытуемого БПЛА.
Использование реального радиолокационного оборудования вместо математических моделей объектов фоно-целевой обстановки, имитация сближения с объектами наблюдения и угловых отклонения испытываемой системы управления БПЛА с помощью динамических стендов повышают достоверность полученных данных.
Кроме того, динамический стенд-качалка имеет три степени свободы, что позволяет совместить задачи проверки этапов самонаведения в вертикальной плоскости и горизонтальной плоскостях в одном пуске.
Промышленная применимость изобретения определяется тем, что предлагаемое устройство может быть изготовлено на основании приведенного описания с использованием известных комплектующих изделий по известной в радиопромышленности технологии и использовано для комплексного моделирования систем управления БПЛА и радиолокационными визирами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2002 |
|
RU2207485C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1994 |
|
RU2093852C1 |
Изобретение относится к имитаторам, снабженным радиолокационным визиром. Устройство содержит радиолокационный визир с вычислительной машиной, трехстепенной динамический стенд-качалку, имитатор эхо-сигнала, делитель мощности, фазовые модуляторы, блоки задержки, имитаторы доплеровского сдвига частоты, управляемые аттенюаторы, рупорные антенны, подвижные основания, электромеханический имитатор движения целей, безэховую камеру, выполненную в виде помещения, обшитого радиопоглощающим материалом, управляемый аттенюатор сигнала помехи, имитатор сигнала помехи, пульт управления, устройство имитации БПЛА и внешних условий полета, имитатор движения БПЛА, имитатор ветровых порывов, имитатор упругости, имитатор радиовысотомера и подстилающей поверхности, блок выработки сигналов управления, имитатор рулей. Cтенд оснащен цифровыми датчиками углов и скорости разворота платформы, концевыми выключателями. Имитатор движения целей выполнен в виде фермы, на которой закреплено монтажное устройство с установленной на нем направляющей для движения подвижных оснований, выполненных в виде кареток, и оснащено зубчатой рейкой. Технический результат - повышение достоверности моделирования. 1 ил.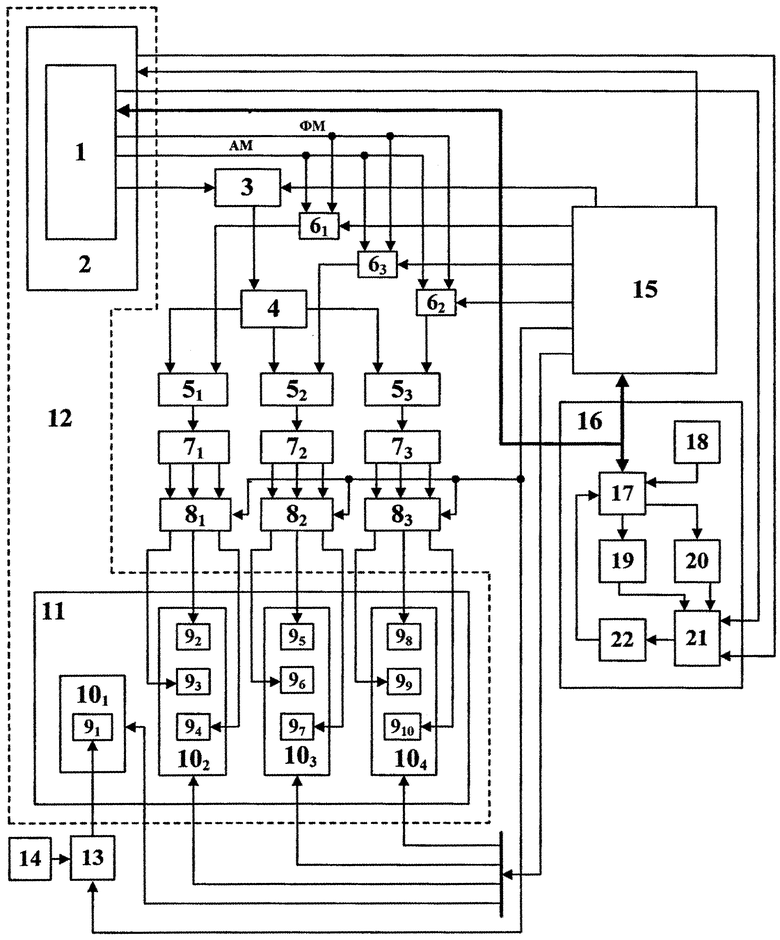
Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом (БПЛА) с радиолокационным визиром, содержащее пульт управления, радиолокационный визир (РЛВ), имитатор эхо-сигнала, электромеханический имитатор движения целей, содержащий первую рупорную антенну, установленную на первом подвижном основании, а также устройство имитации БПЛА и внешних условий полета, соединенное с радиолокационным визиром и пультом управления, отличающееся тем, что дополнительно содержит многоканальный делитель мощности, вход которого соединен с выходом имитатора эхо-сигнала, имитатор сигнала помехи, выход которого через управляемый аттенюатор сигнала помехи соединен с первой рупорной антенной электромеханического имитатора движения целей, кроме этого, в устройство введены группа блоков задержки, группа фазовых модуляторов, группа имитаторов доплеровского сдвига частоты и группа блоков управляемых аттенюаторов по количеству дополнительных подвижных оснований, введенных в электромеханический имитатор движения целей, на каждом из которых установлены по меньшей мере по две рупорные антенны, входы которых через соответствующие аттенюаторы соответствующих блоков управляемых аттенюаторов соединены с выходами соответствующих имитаторов доплеровского сдвига частоты, входы которых соединены с выходами соответствующих фазовых модуляторов, первые входы которых соединены с выходами многоканального делителя мощности, а вторые - с выходами соответствующих блоков задержки, при этом выход опорного сигнала сверхвысокой частоты радиолокационного визира соединен с информационным входом имитатора эхо-сигнала, а его выходы, на которых формируются коды амплитудной модуляции и фазовой манипуляции, соединены с первыми и вторыми входами блоков задержки, третьи входы которых соединены с выходами пульта управления, на которых формируются коды задержки эхо-сигналов, кроме этого, радиолокационный визир установлен на трехстепенном динамическом стенде, который вместе с оборудованием электромеханического имитатора движения целей помещен в безэховую камеру, управляющие входы приводов трехстепенного динамического стенда и приводов подвижных оснований электромеханического имитатора движения целей, а также управляющие входы блоков управляемых аттенюаторов, управляемого аттенюатора сигнала помехи и управляющий вход имитатора эхо-сигнала соединены с соответствующими выходами пульта управления.
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Способ получения полистирола | 1955 |
|
SU105466A1 |
| US 6969992 A, 29.11.2005 | |||
| US 3474447 A, 21.10.1969 | |||
| US 5541607 A, 30.07.1996 | |||
| US 3982244 A, 21.09.1976 | |||
| US 5489869 A, 06.02.1996 | |||
| US 4002980 A, 11.01.1977 | |||
| Имитатор высокочастотного частотномодулированного доплеровского сигнала | 1990 |
|
SU1758617A1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО ВЫСОКОЧАСТОТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО ДОПЛЕРОВСКОГО СИГНАЛА | 2010 |
|
RU2469348C2 |

