Предлагаемое изобретение относится к радиолокации протяженных целей, в частности к радиолокационным измерителям высоты, скорости и наклона вектора скорости ЛА относительно земной поверхности.
Изобретение может быть использовано при пикирующих траекториях летательных аппаратов (ЛА), в том числе на беспилотных летательных аппаратах и снарядах. Результаты измерений высоты и вектора скорости ЛА могут быть использованы в интересах автономной навигации ЛА или коррекции инерциальной системы управления.
Траекторные измерения высоты и скорости полета летательного аппарата (ЛА) обычно выполняет радиовысотомер и радиолокационный измеритель скорости. Имеются варианты построения радиовысотомеров и измерителей скорости, в том числе выполнения их функций как разными устройствами, так и одним устройством.
Известный доплеровский измеритель составляющих скорости и высоты полета ЛА [1, с. 141-143] излучает зондирующий сигнал, частотно модулированный по симметричному пилообразному закону. Принимают отраженный сигнал через три или четыре коммутируемых некомпланарных луча антенной системы. По каждому лучу принятый сигнал смешивают с гетеродинным, соответствующим зондирующему сигналу, сдвинутому на промежуточную частоту. Отраженный сигнал, перенесенный на промежуточную частоту, после полосового усиления подвергают синхронному детектированию с эталонным сигналом промежуточной частоты с получением сигнала биений. Сигнал биений разделяют по времени на два участка, соответствующих восходящей и нисходящей ветви симметричной пилообразной модуляции. Измеряют частоты биений отселектированных сигналов. По сумме и разности измеренных частот определяют наклонную дальность ЛА до земной поверхности и доплеровский сдвиг сигнала. На основании измерений наклонных дальностей и доплеровских сдвигов по каждому из лучей с учетом известной ориентации лучей относительно осей связанной системы координат через решение системы уравнений определяются составляющие скорости и высота ЛА.
Недостатком способа является применение сложной антенны с коммутируемыми по направлению лучами. Направления лучей к Земле фиксированы и не обеспечивают возможность измерений высоты и скорости ЛА на пикирующей траектории.
Известен способ измерения составляющих скорости ЛА [2], в котором используются данные радиолокационных изображений (РЛИ) подстилающей земной поверхности от когерентной РЛС моноимпульсного типа при переднебоковом обзоре. Согласно способу получают РЛИ подстилающей поверхности при разных (более двух) положениях лучей антенной системы, отличающихся по азимуту и углу места; в координатах дальность - доплеровская частота пеленгуют яркие точки РЛИ по азимуту и углу места моноимпульсным методом. При полете над ровной горизонтальной или водной поверхностью угол места ярких точек определяется из данных измерений высоты ЛА, выполняемых радиовысотомером, и наклонной дальности, определяют невязку ΔF оценки доплеровского смещения сигнала с данными, определяемыми скоростью ЛА по данным инерциальной навигационной системы (ИНС) и измеренными угловыми положениями ярких точек. Ошибка измерения трех компонент вектора скорости ЛА в ИНС находится расчетом, учитывающим невязку оценки доплеровского смещения ΔF и матрицу координат K ярких точек размерностью K*3. За счет пеленгации ярких точек исключаются ошибки, присущие доплеровским измерителям скорости, обусловленные влиянием отражающих свойств подстилающей поверхности.
Достоинством способа является повышенная точность измерения за счет измерения координат (дальность, доплеровская частота, угловое положение) множества ярких точек поверхности Земли при разных положениях оси диаграммы направленности антенной системы и индивидуального учета их вклада в оценку составляющих скорости.
Недостатком способа является то, что для его реализации требуется сложная, перестраиваемая по углу моноимпульсная антенная система переднебокового визирования с относительно большими габаритами. Для измерения высоты используется отдельная антенная схема, приемопередатчик и устройство обработки.
Известен способ измерения составляющих скорости и высоты ЛА [3], взятый в качестве прототипа, согласно которому производится вертикальное зондирование земной поверхности радиолокационным сигналом, когерентный прием отраженного сигнала с получением двумерного радиолокационного изображения (РЛИ) местности в координатах дальность - доплеровская частота, определение разрешаемых элементов РЛИ, мощность отраженного сигнала от которых превышает порог обнаружения. Производят первичную оценку высоты летательного аппарата НП, находят кривую максимального контраста селектированного участка РЛИ в координатах дальность - доплеровская частота. Задаются исходной i=0 гипотезой о векторе измеряемых параметров, включающий высоту Н, путевую VП и вертикальную VB составляющие скорости. В качестве исходного значения высоты H берут оценку первичной высоты НП, в качестве исходных значений путевой VП и вертикальной VВ скоростей берут центры априорно известных соответствующих окон. Уточняют методом итераций гипотезу измеряемых параметров в последовательности:
рассчитывают кривую максимального контраста, соответствующую текущей гипотезе,
вычисляют вектор-сигнал ошибки, равный разности гипотетической вектор-кривой максимального контраста и вектор-кривой максимального контраста РЛИ,
преобразуют вектор-сигнал ошибки в вектор-сигнал ошибки измеряемых параметров с помощью весовой матрицы,
складывают вектор-сигнал ошибки измеряемых параметров с вектором гипотезы с получением нового уточненного вектора измеряемых параметров,
повторяют итерации и получают в режиме слежения итоговый вектор измеряемых параметров.
Данный метод использует прием и передачу сигнала к земной поверхности с одного направления, что упрощает конструкцию антенной системы. Оценка измеряемых координат производится по множеству разрешаемых точек поверхности, что повышает точность оценок измеряемых координат.
Недостатком способа является невозможность использования устройства на ЛА при пикирующих траекториях.
Целью предлагаемого изобретения является измерение высоты, истинной скорости ЛА и угла между направлением вектора скорости и плоскостью горизонта (угла пикирования) при использовании однолучевой антенной системы, ориентированной в направлении, совпадающем с продольной осью ЛА.
Поставленная цель достигается за счет:
зондирования земной поверхности на пикирующей траектории ЛА радиолокационным сигналом через антенную систему, жестко закрепленную на ЛА, ориентированную вдоль продольной оси ЛА, при этом вектор скорости ЛА находится в главном лепестке приемопередающей ДНА,
когерентного приема отраженного сигнала с получением кадра двумерного РЛИ местности в координатах дальность - доплеровская частота.
Для каждого кадра РЛИ находят:
- зависимость измеренной максимальной доплеровской частоты (МДЧ) от дальности U(R), в дальнейшем называемой кривой МДЧ по данным РЛИ,
- итерационную оценку измеряемых координат ЛА  , где V - значение истинной скорости ЛА, γV - угол наклона истинной скорости ЛА относительно горизонта, Н - значение высоты ЛА;
, где V - значение истинной скорости ЛА, γV - угол наклона истинной скорости ЛА относительно горизонта, Н - значение высоты ЛА;
Повторяют измерения кадров РЛИ и итерационную оценку соответствующих координат ЛА с выдачей найденных значений потребителю;
Итерационную оценку измеряемых координат ЛА выполняют в последовательности:
- формируют гипотезу о текущих координатах ЛА Хi=(Vi,γVi,Hi)T. В качестве начальной гипотезы берут либо априорные значения V0, γV0 и Н0, либо данные предшествующей оценки, выданной потребителю;
- вычисляют для каждой Xi-той гипотезы соответствующую гипотетическую кривую МДЧ f(Rn,Xi),
- вычисляют якобиан преобразования по измеряемым координатам для гипотетической кривой МДЧ в окрестности точки Xi=(Vi,γVi,Hi)T,
- вычисляют вектор-сигнал ошибки гипотетической зависимости МДЧ от дальности, соответствующей Хi-той гипотезе, относительно МДЧ по данным РЛИ, называемый в дальнейшем вектор-сигналом ошибки МДЧ,
- преобразуют вектор-сигнал ошибки МДЧ в вектор-сигнал ошибки i-той гипотезы по оцениваемым координатам ΔХi,
- складывают его с Xi-той гипотезой, получают последующую гипотезу Xi+1, проверяемую на (i+1)-й итерации,
- повторяют итерации оценки измеряемых координат ЛА до достижения ошибок оценки координат ЛА допустимых значений,
- выдают оценку измеренных координат ЛА  потребителю, соответствующую последней итерационной оценке координат ЛА Xi+1.
потребителю, соответствующую последней итерационной оценке координат ЛА Xi+1.
Отличия предлагаемого способа от прототипа:
- зондирование земной поверхности производится в направлении оси ЛА на пикирующей траектории, а не по вертикали;
- итерационная процедура уточнения гипотез координат ЛА производится через измерение зависимости кривой МДЧ от дальности, а не кривой максимального контраста.
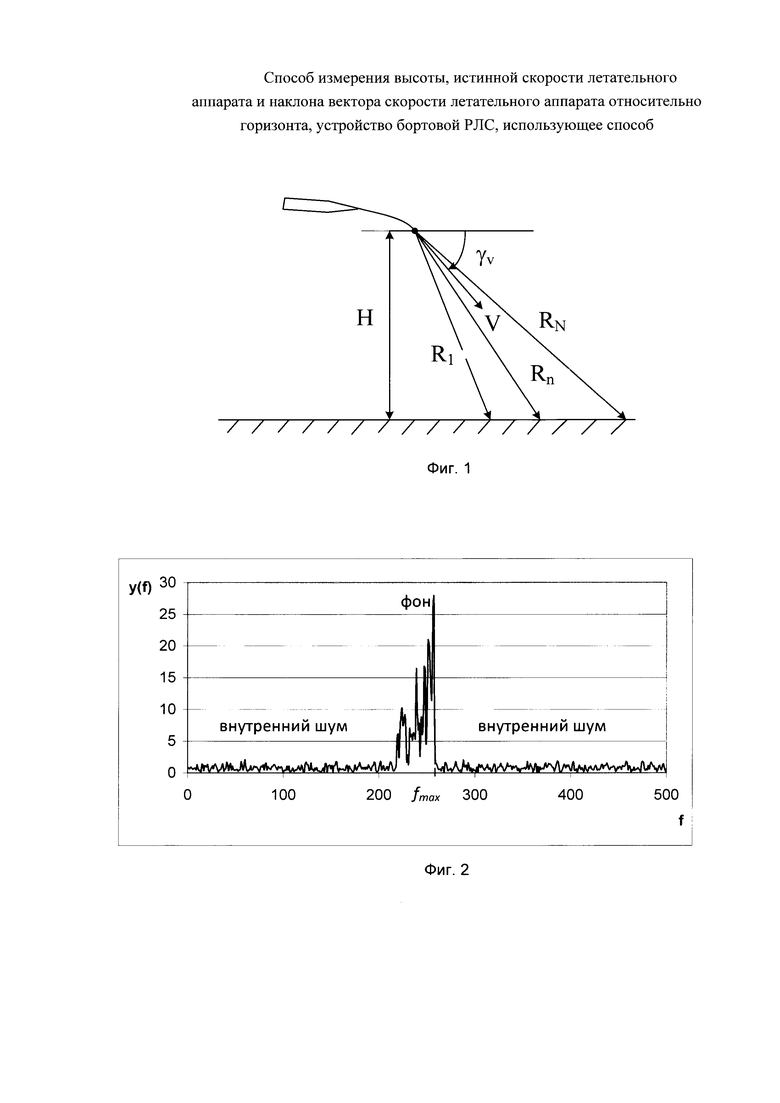
Описание предлагаемого способа измерения высоты, истинной скорости и угла наклона истинной скорости ЛА относительно плоскости горизонта производится со ссыпкой на геометрию фиг. 1. Способ измерения заключается в следующем.
Зондируют земную поверхность радиолокационным сигналом через антенну, жестко закрепленную на ЛА, ориентированную вдоль продольной оси ЛА, при этом вектор скорости ЛА находится в главном лепестке ДНА. Зондирование производится на пикирующем участке траектории ЛА,
когерентно принимают отраженный сигнал с получением кадров двумерного радиолокационного изображения (РЛИ) местности в координатах дальность - доплеровская частота, при этом перемещение ЛА за время накопления можно не учитывать, если разрешение РЛИ по доплеровской частоте δF соответствует расчетному интервалу когерентного накопления Т:

где LCTi - ширина i-того разрешаемого кольца дальности на облучаемой земной поверхности;
δR - разрешение сигнала по дальности;
i - номер разрешаемого кольца дальности, отсчитанный от элемента дальности nh, соответствующего высоте Н,  ;
;
VП - путевая скорость ЛА.
Для каждого кадра РЛИ:
- находят кривую МДЧ U(R):

где f(R) - истинная МДЧ отраженного сигнала на дальности R;
nf - шум измерения;
- представляют выборки измеренной МДЧ по дальности как вектор:
U=[U(R0),…,U(Rn),…,U(RN)]T=[f(R0),…,f(Rn),…,f(RN)]T+[nf(R0),…,nf(Rn),…,nf(RN)]T;
- выполняют итерационную оценку измеряемых координат ЛА  , где V - значение истинной скорости ЛА, γV - угол наклона истинной скорости ЛА относительно горизонта, Н - значение высоты ЛА;
, где V - значение истинной скорости ЛА, γV - угол наклона истинной скорости ЛА относительно горизонта, Н - значение высоты ЛА;
- повторяют измерения кадров РЛИ и итерационную оценку соответствующих координат ЛА с выдачей найденных значений потребителю;
вычисление точек кривой МДЧ по данным РЛИ (по спектру отраженного сигнала на селектируемой дальности, фиг. 2) производится в последовательности:
- находят дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом сечении кадра РЛИ по дальности R исходя из предположения о соответствии положения максимума спектра сигнала максимальной частоте спектра kF:
в каждом сечении кадра РЛИ по дальности R исходя из предположения о соответствии положения максимума спектра сигнала максимальной частоте спектра kF:


где  - комплексная амплитуда сигнала, отраженного (R,k) элементом РЛИ;
- комплексная амплитуда сигнала, отраженного (R,k) элементом РЛИ;
РПР(R,kF) - мощность сигнала, отраженного (R,kF) элементом РЛИ;
R - дальность элемента РЛИ;
kF - индекс гипотезы положения МДЧ;
K - число выборок сигнала с периодом повторения Т, используемых для получения спектра сигнала.
Вычисляют функционал соответствия - LУ(z/R,kF) наблюдаемого комплексного спектра отраженного сигнала  на дальности R гипотезе максимума доплеровской частоты
на дальности R гипотезе максимума доплеровской частоты  :
:

Перебором гипотез kF от 0 до K - 1 на каждой дальности R по положению максимума Ly(z/R,kF) находят  и соответствующие частоты
и соответствующие частоты  кривой МДЧ по данным РЛИ,
кривой МДЧ по данным РЛИ,
итерационную оценку измеряемых координат ЛА выполняют по максимуму функции правдоподобия, вывод соответствующих выражений приведен в Приложении 1. Последовательность итерационных вычислений:
- формируют гипотезу Xi=(Vi,γVi,Hi)T. В качестве начальной гипотезы берут либо априорные значения V0, γV0 и H0, либо данные предшествующего измерения;
- вычисляют для каждой i-той гипотезы соответствующую ей гипотетическую кривую МДЧ f(Rn,Xi):

Rn=nδR;
где λ - длина волны зондирующего сигнала;
δR - разрешение сигнала по дальности;
- линеаризуют зависимость гипотетической кривой МДЧ, соответствующей гипотезе Xi+1, от приращений ΔXi в районе гипотезы Хi=(Vi,γVi,Hi)T
 ,
,
для этого вычисляют якобиан преобразования H(Xi) по измеряемым координатам:
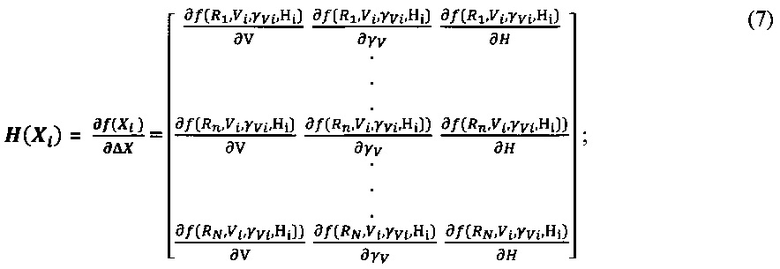
где 


- вычисляют ошибку оценки координат ЛА по i-той гипотезе:


- вычисляют прогноз значения координат ЛА для (i+1) гипотезы:

- сравнивают ошибки оценки координат ЛА  с допустимыми. При превышении ошибки по любой координате соответствующего допуска повторяют итерационный расчет (6)-(13). При достижении ошибок оценки координат ЛА
с допустимыми. При превышении ошибки по любой координате соответствующего допуска повторяют итерационный расчет (6)-(13). При достижении ошибок оценки координат ЛА  допустимых значений итерации прекращаются и выдается последняя итерационная оценка координат ЛА
допустимых значений итерации прекращаются и выдается последняя итерационная оценка координат ЛА  (13) потребителю.
(13) потребителю.
В качестве прототипа радиолокационного измерителя высоты, истинной скорости и угла наклона вектора истинной скорости ЛА относительно горизонта использовано устройство [3], в котором когерентный приемопередатчик излучает непрерывный несимметрично линейно модулированый по частоте сигнал, излучаемый антенной системой. Антенная система ориентирована по вертикальной оси ЛА. Отраженный сигнал с выхода антенной системы поступает в приемник когерентного приемопередатчика, где получают квадратуры РЛИ в координатах дальность - доплеровская частота и выдают на выход координаты разрешаемых элементов поверхности, превышающие порог обнаружения. По выдаваемому когерентным приемопередатчиком РЛИ определяется высота ЛА, используемая системой управления в качестве априорной. По тем же данным рассчитывается кривая максимального контраста, поступающая на второй вход вычислителя сигнала ошибки. Схема управления управляет процедурой итерационного определения координат ЛА (высота, путевая и вертикальная составляющие скорости ЛА). При включении схема управления последовательно выдает на вычислитель кривой максимального контраста гипотезы о координатах ЛА. В соответствии с этой гипотезой рассчитывается гипотетическая кривая, соответствующая гипотезе, поступающая на первый вход вычислителя сигнала ошибки и вход вычислителя весовой матрицы. Расчетная весовая матрица поступает на второй вход системы управления. Вычислитель сигнала ошибки определяет отклонение гипотетической кривой максимального контраста от аналогичной кривой, полученной по данным РЛИ, и выдает его на третий вход системы управления. Схема управления вычисляет уточненную гипотезу следующей итерации по данным предшествующей гипотезы и произведения весовой матрицы на сигнал ошибки.
Предлагаемый радиолокационный измеритель высоты, истинной скорости и угла наклона вектора скорости ЛА относительно горизонта содержит когерентный приемопередатчик, первые вход и выход которого соединены с соответствующими выходом и входом антенной системы,
схему управления, первый выход которой через вычислитель весовой матрицы соединен со вторым входом схемы управления,
вычислитель сигнала ошибки, соединенный с первым входом схемы управления,
третий вход-выход схемы управления является интерфейсным для связи с потребителем,
когерентный приемопередатчик формирует на первом выходе непрерывный линейно частотно модулированный сигнал, на втором выходе квадратурное РЛИ сцены в координатах дальность - доплеровская частота, сигнал элементов РЛИ превышает порог обнаружения, отличается тем, что
зондирование и прием отраженного сигнала производится на пикирующем участке полета ЛА вдоль продольной оси ЛА, при этом вектор скорости ЛА находится в главном лепестке приемопередающей диаграммы направленности антенны,
в устройство дополнительно введены вычислитель кривой МДЧ и вычислитель гипотетической кривой МЧД, при этом
второй выход когерентного приемопередатчика через вычислитель кривой МЧД соединен с первым входом вычислителя сигнала ошибки,
первый выход схемы управления через вычислитель гипотетической кривой МДЧ соединен со вторым входом вычислителя сигнала ошибки,
второй выход схемы управления соединен с вторым входом когерентного приемопередатчика,
схема управления включает когерентный приемопередатчик в начале измерений радиолокационного изображения сцены по данным команды, приходящей по интерфейсу от потребителя,
формирует начальную гипотезу о координатах ЛА по априорным данным о его положении,
итерационно по данным вектор-сигнала ошибки формирует уточняемую гипотезу о координатах ЛА и выдает ее на первом выходе,
при ошибках итерационно уточняемой гипотезы менее допуска выдает на третьем входе-выходе потребителю оценку координат ЛА, соответствующую гипотезе последней итерации,
повторный запуск когерентного приемопередатчика на новое измерение производится схемой управления после выдачи оценки координат ЛА предыдущего измерения,
уточняемая гипотеза вычисляется как сумма предшествующей гипотезы с произведением весовой матрицы на сигнал ошибки.
Сущность устройства, реализующего способ измерения высоты, истинной скорости и угла наклона вектора скорости относительно горизонта поясняется дальнейшим описанием, приложением 1 и чертежами.
В приложении 1 описан алгоритм оценки вектора измеряемых координат ЛА по максимуму функции правдоподобия.
На фиг. 1 изображена геометрия измеряемых параметров ЛА и сигнала на пикирующей траектории ЛА.
На фиг. 2 приведен спектр сигнала, отраженного от подстилающей поверхности в произвольном стробе дальности.
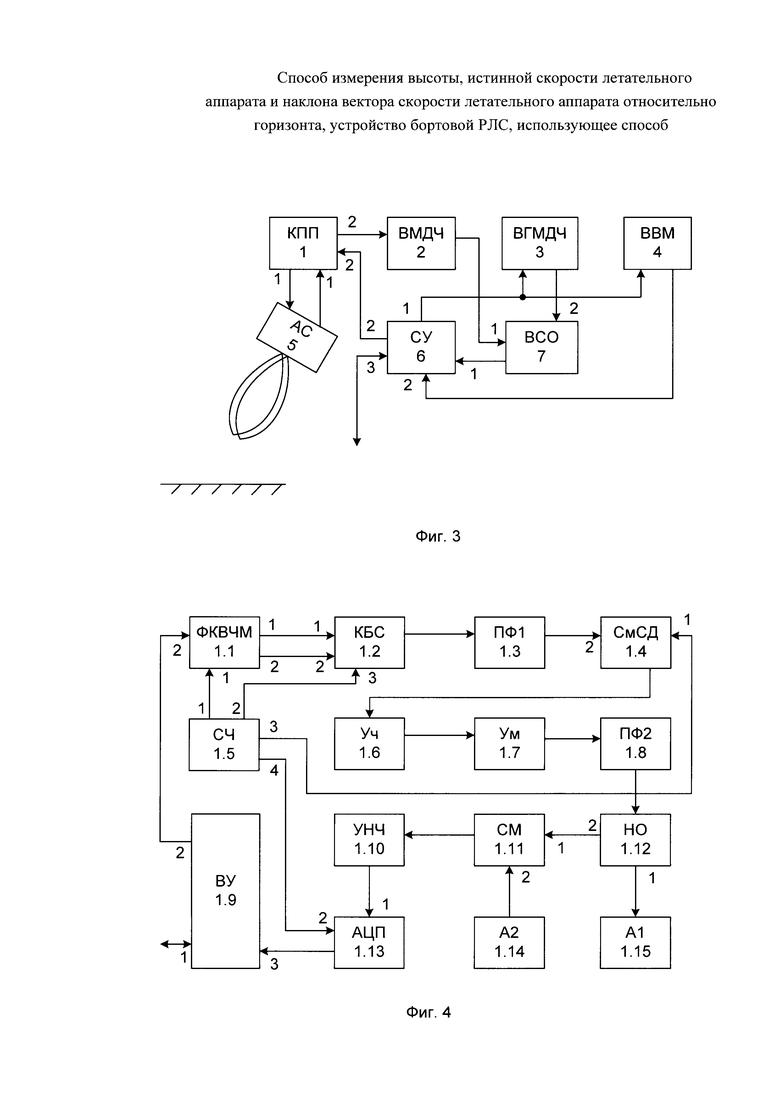
На фиг. 3 изображена структурная схема устройства - измерителя высоты, истинной скорости и угла наклона вектора скорости относительно горизонта.
На фиг. 4 изображен вариант когерентного приемопередатчика с непрерывным ЛЧМ сигналом [4].
На фиг. 3 приняты следующие обозначения:
1 - Когерентный приемопередатчик (КПП);
2 - Вычислитель кривой МДЧ по РЛИ (ВМДЧ);
3 - Вычислитель гипотетической кривой МДЧ (ВГМДЧ);
4 - Вычислитель весовой матрицы (ВВМ);
5 - Антенная система (АС);
6 - Схема управления (СУ);
7 - Вычислитель сигнала ошибки МДЧ (ВСО).
На фиг. 3 последовательно соединены АС 5, КПП 1, ВМДЧ 2, ВСО 7 и СУ 6, первый выход СУ 6 через ВВМ 4 соединен с вторым входом СУ 6, второй выход СУ 6 соединен с вторым входом КПП 1, первый выход СУ 6 через ВГДМЧ 3 соединен с вторым входом ВСО 7, первый выход КПП 1 соединен с входом АС 5, третий вход-выход СУ 6 является интерфейсным для связи с потребителем.
На фиг. 4 приняты следующие обозначения:
1.1 Формирователь квадратурного видео частотного ЧМ сигнала (ФКВЧМ),
1.2 Квадратурный балансный смеситель (КБС),
1.3 Первый полосовой фильтр (ПФ1),
1.4 Смеситель сдвига (СмСД),
1.5 Синтезатор частот (СЧ),
1.6 Умножитель частоты (Уч),
1.7 Усилитель мощности (Ум),
1.8 Второй полосовой фильтр (ПФ2),
1.9 Вычислитель (ВУ),
1.10 Усилитель низкой частоты (УНЧ),
1.11 Смеситель (См),
1.12 Направленный ответвитель (НО),
1.13 Аналого-цифровой преобразователь (АЦП),
1.14 Вторая (приемная) антенна (А2),
1.15 Первая (передающая) антенна (А1).
На фиг. 4 последовательно соединены вычислитель 1.9, формирователь квадратурного видео частотного ЧМ сигнала 1.1, квадратурный балансный смеситель 1.2, первый полосовой фильтр 1.3, смеситель сдвига 1.4, умножитель частоты 1.6, усилитель мощности 1.7, второй полосовой фильтр 1.8, направленный ответвитель 1.12, смеситель 1.11, усилитель низкой частоты 1.10 и аналого-цифровой преобразователь 1.13, второй выход формирователя видео частотного ЧМ сигнала 1.1 соединен с одноименным входом квадратурного балансного смесителя 1.2, первый выход направленного ответвите ля 1.12 соединен с входом передающей антенны 1.15, выход приемной антенны 1.14 соединен со вторым входом смесителя 1.11, первый выход синтезатора частот 1.5 соединен с одноименным входом формирователя квадратурного видео частотного ЧМ сигнала 1.1, второй выход синтезатора частот 1.5 соединен с третьим входом квадратурного балансного смесителя 1.2, третий выход синтезатора частоты 1.5 соединен с первым входом смесителя сдвига 1.4, четвертый выход синтезатора частот 1.5 соединен со вторым входом аналого-цифрового преобразователя 1.13, первый вход-выход вычислительного устройства является входом-выходом когерентного приемопередатчика 1.
Элементы 2-4, 6, 7 устройства, изображенного на фиг. 3, могут быть выполнены на основе единой бортовой вычислительной машины. Когерентный приемопередатчик 1 с антенной системой 5 может быть выполнен по схеме фиг. 4 [4].
Работа измерителя высоты истинной скорости и угла наклона вектора скорости относительно горизонта, изображенного на фиг. 3, происходит в следующей последовательности.
Схема управления 6 по команде, приходящей извне на его интерфейсный третий вход-выход, включает по второму входу когерентный приемопередатчик 1, формирует начальную гипотезу Х0=(V0,γV0,Н0)Т о координатах ЛА, соответствующую априорным координатам ЛА в начале управляемого участка траектории, выдает ее на входы вычислителя гипотетической кривой МДЧ 3 и вычислителя весовой матрицы 4.
Когерентный приемопередатчик 1 с непрерывным излучением формирует на первом выходе зондирующий линейно частотно модулированный сигнал, который излучается через передающую антенну антенной системы 5 в сторону земной поверхности вдоль продольной оси ЛА. Отраженный сигнал принимается приемной антенной системы 5, ориентированной параллельно направлению передающей антенны. На втором выходе когерентного приемопередатчика 1 формируется квадратурное РЛИ сцены  в координатах дальность - доплеровская частота. На выход выдаются элементы РЛИ, сигнал от которых превышает порог обнаружения. РЛИ поступает на вычислитель кривой МДЧ 2 (координат U(Rn) вектора U). Значения U(R) находятся по максимуму функционала соответствия LУ(z/R,kF), рассчитываемого по выражениям (3)-(5). Результаты расчета поступают на первый вход вычислителя сигнала ошибки МДЧ 7.
в координатах дальность - доплеровская частота. На выход выдаются элементы РЛИ, сигнал от которых превышает порог обнаружения. РЛИ поступает на вычислитель кривой МДЧ 2 (координат U(Rn) вектора U). Значения U(R) находятся по максимуму функционала соответствия LУ(z/R,kF), рассчитываемого по выражениям (3)-(5). Результаты расчета поступают на первый вход вычислителя сигнала ошибки МДЧ 7.
Расчетные значения координат гипотетического вектора - кривой МДЧ  , соответствующие гипотезе Хi=(Vi,γVi,Hi)T и определяемые (6), поступают на второй вход вычислителя сигнала ошибки МДЧ 7, формирующего вектор-сигнал ошибки
, соответствующие гипотезе Хi=(Vi,γVi,Hi)T и определяемые (6), поступают на второй вход вычислителя сигнала ошибки МДЧ 7, формирующего вектор-сигнал ошибки  . С выхода вычислителя сигнала ошибки 7 вектор-сигнал ошибки поступает на первый вход схемы управления 6, определяющего ошибку гипотезы ΔXi по выражениям (7)-(11). Уточненное значение координат ЛА Xi+1, рассчитывается схемой управления 6 по выражению (13).
. С выхода вычислителя сигнала ошибки 7 вектор-сигнал ошибки поступает на первый вход схемы управления 6, определяющего ошибку гипотезы ΔXi по выражениям (7)-(11). Уточненное значение координат ЛА Xi+1, рассчитывается схемой управления 6 по выражению (13).
Если ошибка ΔХi хотя бы по одной из координат ЛА находится вне поля допуска, новое значение гипотезы Xi+1 выдается на вычислитель гипотетической кривой МДЧ 3 и вычислитель весовой матрицы 4 для уточнения гипотетической кривой МДЧ  по выражению (13) и весовой матрицы Wi по выражению (12) соответственно. Цикл итераций по уточнению Xi продолжается до тех пор, пока координаты ΔХi не войдут в допустимые пределы. В этом случае схема управления 6:
по выражению (13) и весовой матрицы Wi по выражению (12) соответственно. Цикл итераций по уточнению Xi продолжается до тех пор, пока координаты ΔХi не войдут в допустимые пределы. В этом случае схема управления 6:
- выдает потребителю через третий вход - выход оценку координат ЛА  , соответствующую последнему значению Xi=(Vi,γVi,Нi)т;
, соответствующую последнему значению Xi=(Vi,γVi,Нi)т;
- выдает на когерентный приемопередатчик 1 команду на получение следующего РЛИ;
- выдает на вычислители гипотетической кривой МДЧ 3 и вычислитель весовой матрицы 4 значение предыдущего измерения в качестве исходного X0 для проведения нового цикла итерационной оценки текущих координат ЛА.
Когерентный приемопередатчик 1 с непрерывным ЛЧМ сигналом может быть выполнен по схеме на фиг. 4. Работа его описана в [4] и здесь не приводится.
Моделированием показано, что предлагаемый способ при времени накопления 100 мс, углах γV от минус 30° до минус 60°, скоростях V=600-200 м/с и высотах Н = 1500 м - 500 м обеспечивал СКО σγ=0,05-0,15°, σV=0,02-0,04 м/с, σH=2,0-0,6 м.
Техническим преимуществом предлагаемого способа и устройства является возможность измерения высоты и скорости ЛА на пикирующей трассе при ориентации антенной системы вдоль его продольной оси. За счет использования большого числа точек измеренной кривой МДЧ способ и устройство обладают сниженной ошибкой измерения высоты, истинной скорости и угла вектора скорости ЛА относительно горизонта.
Пользуясь сведениями, представленными в материалах заявки, предлагаемый радиолокационный измеритель высоты, истинной скорости и наклона вектора скорости ЛА относительно горизонта может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при навигации ЛА к цели.
Приложение 1
Оценка вектора измеряемых параметров по максимуму функции правдоподобия
Считая выборки измеренной кривой МДЧ U распределенными по гауссовскому закону, функция правдоподобия для вектора оцениваемых параметров X=(V,γV,Н)T имеет вид:

где ϕ - центрированный корреляционный момент элементов шумовой выборки.
Необходимым условием максимума функции правдоподобия является

После разложения f(X) в ряд Тейлора в окрестности точки X0=[V0,γV0,Н0]T и сохранения только членов первого порядка получено

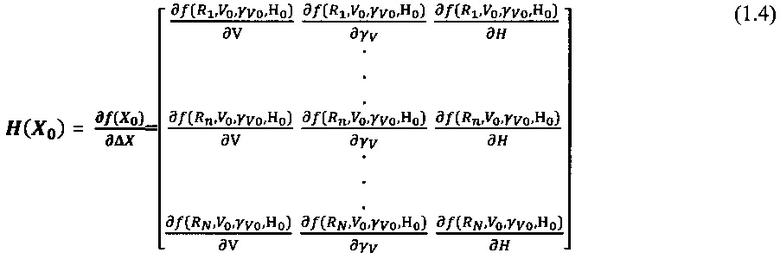



Решение (1.2) с учетом (1.3) приводит к выражению по оценке измеряемых параметров


Считая измерения скачка по частоте равнозначными, имеем матрицу  , где
, где  - точность измерения, определяемая шириной полосы пропускания доплеровского фильтра. Отсюда выражение (1.9) для
- точность измерения, определяемая шириной полосы пропускания доплеровского фильтра. Отсюда выражение (1.9) для  упрощается:
упрощается:

Выражения (1.8)…(1.10) по структуре являются итерационным алгоритмом расширенного фильтра Калмана.
ЛИТЕРАТУРА
1. Колчинский В.Е. и др. Автономные доплеровские устройства и системы навигации летательных аппаратов. Под ред. В.Е. Колчинского. М.: Сов. Радио, 1975.
2. Патент России, G01S 13/42, №2411538. Способ определения ошибки измерения скорости ЛА инерциальной навигационной системой и бортовой навигационный комплекс для его реализации.
3. Патент России, G01S 13/42, №2551896. Способ однолучевого измерения высоты и составляющих скорости летательного аппарата и устройство радиовысотомера, реализующего способ.
4. Патент России, G01S 13/00, №2347235. Способ формирования когерентного частотно-модулированного сигнала для РЛС с периодической ЧМ модуляцией и устройство, реализующее способ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
Изобретение относится к радиолокации протяженных целей, в частности к радиолокационным измерителям высоты, скорости и наклона вектора скорости летательного аппарата (ЛА) относительно земной поверхности, и может быть использовано при пикирующих траекториях ЛА, в том числе на беспилотных летательных аппаратах и снарядах. Результаты измерений высоты и вектора скорости ЛА могут быть использованы в интересах автономной навигации ЛА или коррекции инерциальной системы управления. Достигаемый технический результат - измерение высоты, истинной скорости ЛА и угла между направлением вектора скорости и плоскостью горизонта (угла пикирования) при использовании однолучевой антенной системы, ориентированной в направлении, совпадающем с продольной осью ЛА. Указанный результат достигается тем, что производится зондирование земной поверхности радиолокационным сигналом в направлении продольной оси ЛА, когерентный прием отраженного сигнала с получением двумерного радиолокационного изображения (РЛИ) местности в координатах дальность - доплеровская частота, нахождение зависимости максимальной доплеровской частоты (МДЧ) от дальности по данным РЛИ, формирование исходной гипотезы о координатах ЛА по имеющимся априорным данным, при этом итерационно уточняют гипотезу о значениях измеряемых параметров за счет расчета гипотетической кривой МДЧ, соответствующей гипотезе, формируют сигнал ошибки гипотетической кривой МДЧ относительно кривой МДЧ по данным РЛИ, преобразуют сигнал ошибки кривой МДЧ в сигнал ошибки измеряемых параметров, суммируют его с уточняемой гипотезой, повторяют итерации и выдают в режиме слежения измеренных параметров высоты, истинной скорости и угла наклона вектора скорости ЛА относительно горизонта потребителю. 2 н. и 1 з.п. ф-лы, 4 ил.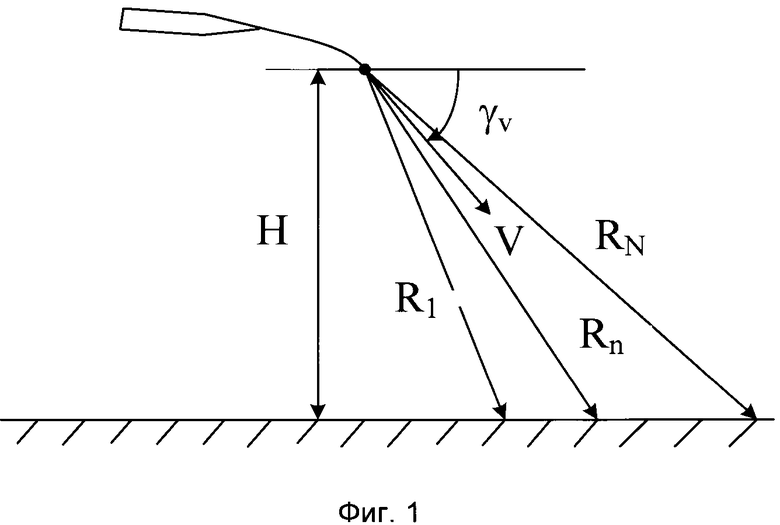
1. Способ радиолокационного измерения высоты, истинной скорости и угла наклона вектора скорости летательного аппарата (ЛА) относительно горизонта, включающий зондирование земной поверхности радиолокационным сигналом через однолучевую антенную систему, излучающую и принимающую отраженный сигнал в зоне перекрытия диаграмм направленности (ДНА) передающей и приемной антенны, когерентный прием отраженного сигнала с получением квадратур двумерного радиолокационного изображения (РЛИ) z(R,f) местности в координатах дальность - доплеровская частота, при этом разрешение РЛИ по доплеровской частоте не должно превышать отношения максимальной путевой скорости ЛА к горизонтальной ширине разрешаемого кольца дальности в пределах облученного участка поверхности, выделение на РЛИ экстремальной кривой, связанной с измеряемыми координатами ЛА, в дальнейшем называемой экстремальной кривой, при этом формируют вектор - гипотезу Xi о измеряемых координатах ЛА, вычисляют экстремальную гипотетическую кривую для гипотезы Xi, определяют вектор - ошибку гипотезы ΔXi как произведение весовой матрицы Wi на вектор рассогласования экстремальной гипотетической кривой текущей гипотезы Xi от экстремальной кривой наблюдаемого РЛИ, формируют новую вектор - гипотезу Xi+1 как сумму вектор - гипотезы текущей итерации Xi и вектор - ошибки гипотезы ΔXi, повторяют итерации уточнения гипотезы Xi до тех пор, пока все координаты вектора ошибки гипотезы ΔXi не станут меньше соответствующих допусков, выдают оценку текущих координат ЛА, соответствующую последней итерации, повторяют для новых РЛИ оценку текущих координат ЛА через вычисления экстремальной кривой и итерационную процедуру уточнения вектор - гипотезы о текущих координатах ЛА, считая начальной оценку координат ЛА, полученную в предыдущем цикле итераций, отличающийся тем, что зондирование и прием отраженного сигнала производится на пикирующем участке траектории ЛА вдоль продольной оси ЛА, при этом вектор скорости ЛА находится в главном лепестке приемопередающей ДНА; в качестве измеряемых координат ЛА РЛС используют вектор 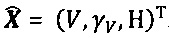 , где V - истинная скорость ЛА, γV - угол наклона скорости ЛА относительно горизонта, Н - высота ЛА; в качестве экстремальной кривой по данным РЛИ используют зависимость максимальной доплеровской частоты (МДЧ) от дальности U(R), в дальнейшем называемой кривой МДЧ по данным РЛИ; в качестве экстремальной гипотетической кривой для текущей гипотезы Xi берут расчетную гипотетическую кривую МДЧ, соответствующую текущей гипотезе Xi; в качестве весовой матрицы Wi, преобразующей вектор рассогласования экстремальных кривых МДЧ наблюдаемого РЛИ и гипотетической МДЧ для гипотезы Xi, берут произведение двух матриц: первая матрица - обратная произведению транспонированной
, где V - истинная скорость ЛА, γV - угол наклона скорости ЛА относительно горизонта, Н - высота ЛА; в качестве экстремальной кривой по данным РЛИ используют зависимость максимальной доплеровской частоты (МДЧ) от дальности U(R), в дальнейшем называемой кривой МДЧ по данным РЛИ; в качестве экстремальной гипотетической кривой для текущей гипотезы Xi берут расчетную гипотетическую кривую МДЧ, соответствующую текущей гипотезе Xi; в качестве весовой матрицы Wi, преобразующей вектор рассогласования экстремальных кривых МДЧ наблюдаемого РЛИ и гипотетической МДЧ для гипотезы Xi, берут произведение двух матриц: первая матрица - обратная произведению транспонированной  и прямой матрицы Hi, вторая матрица - транспонированная матрица
и прямой матрицы Hi, вторая матрица - транспонированная матрица  , матрица Hi является якобианом преобразования гипотетической кривой МДЧ для гипотезы Xi, координаты строки матрицы Hi равны частным производным гипотетической кривой МДЧ для гипотезы Xi по измеряемым координатам (V, γV, Н) на дальностях Rn элементов РЛИ, в качестве начальной гипотезы, используемой при итерациях, берут априорные значения истинной скорости V0, угла наклона вектора скорости относительно горизонта γV0 и высоты ЛА Н0.
, матрица Hi является якобианом преобразования гипотетической кривой МДЧ для гипотезы Xi, координаты строки матрицы Hi равны частным производным гипотетической кривой МДЧ для гипотезы Xi по измеряемым координатам (V, γV, Н) на дальностях Rn элементов РЛИ, в качестве начальной гипотезы, используемой при итерациях, берут априорные значения истинной скорости V0, угла наклона вектора скорости относительно горизонта γV0 и высоты ЛА Н0.
2. Способ радиолокационного измерения высоты, истинной скорости и угла наклона вектора скорости летательного аппарата (ЛА) относительно горизонта по п. 1, отличающийся тем, что вычисление кривой МДЧ по данным РЛИ производится в последовательности: находят дисперсии шума  и сигнала с шумом
и сигнала с шумом  в каждом сечении кадра РЛИ по дальности R исходя из предположения о соответствии положения максимума спектра сигнала максимальной частоте спектра с индексом частоты kF, вычисляют функционал соответствия LУ(z/R,kF) наблюдаемого комплексного спектра отраженного сигнала
в каждом сечении кадра РЛИ по дальности R исходя из предположения о соответствии положения максимума спектра сигнала максимальной частоте спектра с индексом частоты kF, вычисляют функционал соответствия LУ(z/R,kF) наблюдаемого комплексного спектра отраженного сигнала  на дальности R гипотетической кривой МДЧ, соответствующей гипотезе Хi на частоте
на дальности R гипотетической кривой МДЧ, соответствующей гипотезе Хi на частоте  как весовая сумма логарифмов дисперсий шума
как весовая сумма логарифмов дисперсий шума  и сигнала с шумом , весом первого логарифма является число минус (К-kF), весом второго логарифма является число минус kF, перебором гипотез kF от 0 до К-1 на каждой дальности R по положению максимума функционала соответствия Ly(z/R,kF) находят оценку индексов частоты
и сигнала с шумом , весом первого логарифма является число минус (К-kF), весом второго логарифма является число минус kF, перебором гипотез kF от 0 до К-1 на каждой дальности R по положению максимума функционала соответствия Ly(z/R,kF) находят оценку индексов частоты  и соответствующие зависимости U(R) - частоты кривой МДЧ от дальности по данным РЛИ, равной частному от деления оценки индекса частоты
и соответствующие зависимости U(R) - частоты кривой МДЧ от дальности по данным РЛИ, равной частному от деления оценки индекса частоты  - на интервал когерентного накопления сигнала KT.
- на интервал когерентного накопления сигнала KT.
3. Радиолокационный измеритель высоты, истинной скорости и угла наклона вектора скорости ЛА относительно горизонта, содержащий когерентный приемопередатчик, первые вход и выход которого соединены с соответствующими выходом и входом антенной системы, схему управления, первый выход которой через вычислитель весовой матрицы соединен с вторым входом схемы управления, вычислитель сигнала ошибки, соединенный с первым входом схемы управления, третий вход-выход схемы управления является интерфейсным для связи с потребителем, когерентный приемопередатчик формирует на первом выходе непрерывный линейно частотно модулированный сигнал, на втором выходе квадратурное РЛИ сцены в координатах дальность - доплеровская частота, сигнал элементов РЛИ превышает порог обнаружения, отличающийся тем, что зондирование и прием отраженного сигнала производится на пикирующем участке траектории ЛА вдоль продольной оси ЛА, при этом вектор скорости ЛА находится в главном лепестке приемопередающей диаграммы направленности антенны, при этом в измеритель дополнительно введены вычислитель кривой МДЧ и вычислитель гипотетической кривой МДЧ, при этом второй выход когерентного приемопередатчика через вычислитель кривой МДЧ соединен с первым входом вычислителя сигнала ошибки, первый выход схемы управления через вычислитель гипотетической кривой МДЧ соединен со вторым входом вычислителя сигнала ошибки, второй выход схемы управления соединен с вторым входом когерентного приемопередатчика, схема управления запускает когерентный приемопередатчик в начале измерений РЛИ сцены по данным команды, приходящей по интерфейсу от потребителя, формирует начальную гипотезу о координатах ЛА по априорным данным о его положении, итерационно по данным вектор - сигнала ошибки, формирует уточняемую гипотезу о координатах ЛА и выдает ее на первом выходе, при ошибках итерационно уточняемой гипотезы менее допуска выдает на третьем входе - выходе потребителю оценку координат ЛА, соответствующую гипотезе последней итерации, повторный запуск когерентного приемопередатчика на новое измерение производится схемой управления после выдачи оценки координат ЛА предыдущего измерения, уточняемая гипотеза вычисляется как сумма предшествующей гипотезы с произведением весовой матрицы на сигнал ошибки.
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| US 20100045507 A1, 25.02.2010 | |||
| WO 2007038068 A3, 18.05.2007 | |||
| ЭЛЕКТРОЛИТ ДЛЯ ЭЛЕКТРОХИМИЧЕСКОГО ОСАЖДЕНИЯ ФУНКЦИОНАЛЬНЫХ ПОКРЫТИЙ НИКЕЛЬ - БОР | 1993 |
|
RU2124072C1 |

