Изобретение относится к средствам управления, а более конкретно к системам поиска, обнаружения, опознавания и слежения, которые находят применение во многих областях народного хозяйства и военной технике. При этом от технических особенностей систем обнаружения и опознавания зависит и качество, и надежность, и эффективность систем управления (комплексов управления) в целом.
Системы обнаружения и опознавания представляют сбой основу систем управления, в частности военных систем и комплексов, например, таких как системы ПВО, ПРО, комплексы вооружения танков, БМП, БТР, самолетов, вертолетов, артиллерийских систем, медицинских средств поиска и эвакуации и др.
Известны системы обнаружения и опознавания военно-технических систем управления (Перцев И. М. Галандин Н.С. Вооружение танка Т-72. М. Воениздат, 1979, с. 74-91). Эти системы обнаружения и опознавания содержат последовательно соединенные пульт управления, привод наведения и оптическую формирующую систему, представляющую собой основу прибора наблюдения или прицеливания (в данном случае: прицеливания). Оператор, управляя посредством пульта управления и привода наведения оптической формирующей системой, осматривает местность, производит поиск необходимого объекта и его опознавание, а затем выполняет требуемые функции (совмещает с объектом прицельную марку и производит его поражение как цель). Недостатком указанных систем является их значительная зависимость от времени суток, от метео условий, от состояния атмосферы, от профессионализма оператора. В соответствии с этим при отклонении условий наблюдения от нормальных, особенно при использовании этих систем в комплексах вооружения, постоянно присутствует опасность ошибиться в принадлежности объекта ("свой" или "чужой"). Эта особенность еще более усугубляется при однотипных объектах как со своей стороны, так и со стороны противника.
Известна также система обнаружения и опознавания (Латухин А.Н. Противотанковое вооружение. М. Воениздат, 1974, с. 202-236). Она является прототипом заявляемой и содержит установленные на первом (обнаруживающем и опознающем) объекте источник лазерного излучения и соединенный с его выходом модулятор, последовательно соединенные пульт управления, второй выход которого соединен с первым входом источника лазерного излучения, привод наведения и оптическую формирующую систему.
В этой системе по сравнению с предыдущей дополнительно установлены источник лазерного излучения и модулятор, предназначенные в прототипе для связи с управляемым объектом (управляемой ракетой), который с помощью установленной на нем аппаратуры опознает по кодированному лазерному лучу "свой" объект и начинает выполнять поданные с него команды управления. При этом опознавание происходит в значительно худших условиях, чем в первом случае, когда средства обнаружения первой системы, включая и оператора, уже не могут обеспечить опознавания. Однако недостатки первой системы, связанные с опознаванием обнаруженного объекта, на который наводится управляемый объект (управляемая ракета), сохраняются и в прототипе. Поэтому сохраняется и опасность обстрела "своего" объекта вместо цели противника.
Целью изобретения является повышение эффективности опознавания обнаруженных объектов.
Цель достигается тем, что в известную систему обнаружения и опознавания введены размещенные на объекте индикатор дальности, выход которого оптически соединен с вторым входом оптической формирующей системы, первое реле времени, задатчик времени излучения, первый вход которого соединен с первым выходом первого реле времени, а выход с вторым входом источника лазерного излучения, соединенные последовательно дальномер, оптически взаимосвязанный с обнаруживаемым и опознаваемым объектом, второй вход которого соединен с вторым входом задатчика времени излучения, а третий с входом индикатора дальности, привод панкратической системы и панкратическая система, второй вход которого оптически соединен с выходом модулятора, а выход с третьим входом оптической формующей системы, последовательно соединенные первый приемник лазерного излучения, первый демодулятор, измеритель временных интервалов, блок сравнения, с вторым входом которого соединен второй выход первого реле времени и первый индикатор, выход которого оптически соединен с четвертым входом оптической формирующей системы, а также введены размещенные на обнаруживаемом и опознаваемом объекте второй индикатор, уголковый отражатель с диафрагмой, связанный оптически через нее с выходом оптической формирующей системы и входом первого приемника лазерного излучения, и последовательно соединенные второй приемник лазерного излучения, вход которого оптически соединен с выходом оптической формирующей системы, второй демодулятор, второе реле времени и привод диафрагмы, первый выход которого соединен механически с диафрагмой, а второй электрически с входом второго индикатора.
Введение новых элементов и связей позволяет обеспечить опознаваемость не только первого объекта вторым, но и обнаруженного объекта первым объектом.
На чертеже показаны взаимное расположение и связи элементов предлагаемой системы обнаружения и опознавания и приняты следующие обозначения: 1 первый (обнаруживающий и опознающий) объект (0001), 2 индикатор дальности (ИД), 3 дальномер (Д), 4 источник лазерного излучения (ИЛИ), 5 привод панкратической системы (ППС), 6 задатчик времени излучения (ЗВИ), 7 второй (обнаруживаемый и опознаваемый) объект (0002), 8 модулятор (М), 9 - панкратическая система (ПС), 10 первое реле времени (РВ1), 11 - второй приемник лазерного излучения (ПЛИ2), 12 второй демодулятор (ДМ2), 13 оператор (О), 14 оптическая формирующая система (ОФС), 15 второй индикатор (И2), 16 первый индикатор (И1), 17 - диафрагма (Д-а), 18 второе реле времени (РВ2), 19 пульт управления (ПУ), 20 привод наведения (ПН), 21 блок сравнения (БС), 22 измеритель временных интервалов (ИВИ), 23 уголковый отражатель (УО), 24 привод диафрагмы (ПД), 25 первый демодулятор (ДМ1), 26 первый приемник лазерного излучения (ПЛИ1).
Предлагаемые связи и элементы на рисунке показаны пунктиром. Сплошными линиями изображены связи и элементы прототипа. Электрические и оптические связи показаны одинарными линиями, а механические двойными. Блоки 4, 8, 14, 19, 20 являются составными элементами прототипа и других известных систем (Перцев И. М. Галандин Н.С. Вооружение танка Т-72. М. Воениздат, 1979, с. 74-91; Латухин А. Н. Противотанковое вооружение. М. Воениздат, 1974, с. 202-236). Их работа и устройство широко известны (см. там же). Блоки 2, 3, 5, 6, 9-12, 15-18, 20-26 являются новыми. Блоки 2 и 3 (индикатор дальности и дальномер) обеспечивают измерение дальности до второго (обнаруживаемого и опознаваемого) объекта 7, ввод информации об измеренной дальности в поле зрения оптической формирующей системы 14 (посредством индикатора дальности 2, представляющего информацию о дальности в цифровом коде), выработку сигнала для соответствующего перемещения подвижных элементов панкратической системы 9). Их устройство и работа широко известны (Орлов В.А. Лазеры в военной технике, М. Воениздат, 1976, с. 43-76). Привод панкратической системы 5 обеспечивает плавное перемещение подвижных оптических элементов панкратической системы 9, изменяющих расходимость лазерного информационного луча по мере изменения дальности между первым и вторым объектами (между объектами 1 и 7). Задатчик времени излучения (блок 6) обеспечивает выработку и подачу сигнала управления на источник лазерного излучения (блок 4), обеспечивающий определенное время работы блока 4. Это время определяется выражением
tЗВИ tИВИ + tЗ + tПД, (1)
где tЗВИ заданное время излучение блока 4;
tИВИ время, определенное измерителем временных интервалов дальномера 3 и соответствующее времени движения лазерного излучения от излучателя 4 к объекту 7 и обратно;
tЗ заданное время отражения, устанавливаемое с помощью блока 18 (второго реле времени);
tПД время срабатывания блока 24 (привода диафрагмы), определяющего инерционность последнего.
Задатчик времени излучения 6 оптимизирует работу источника лазерного излучения 4. Длительность излучения блока 4, с одной стороны, гарантирует прохождение кодированного (по времени) сигнала, отраженного уголковым отражателем 23, а с другой стороны, экономит энергетический ресурс блока 4 путем своевременного его отключения после прохождения отраженного и закодированного по времени сигнала от уголкового отражателя 23.
Панкратическая система 9 имеет в своем составе подвижные элементы (линзы), которые при перемещении изменяют расходимость лазерного информационного луча в зависимости от расстояния между объектами 1 и 7. Тем самым обеспечивается постоянство поперечного размера лазерного луча в плоскости второго объекта 7, а вместе с этим постоянство энергетических и динамических характеристик. Первое 10 и второе 18 реле времени обеспечивают кодирование по времени отражения сигнала лазерного излучения с блока 23 (уголкового отражателя). Заданное время отражения tЗ устанавливается одинаковым и на первом 10, и на втором 18 реле времени.
Первый 26 и второй 11 приемники лазерного излучения выполняются аналогичными штатному приемнику лазерного излучения, устанавливаемому в прототипе на управляемой ракете. Они вырабатывают сигнал на своем выходе, только после поступления на их вход "своего" сигнала, выработанного блоком 4, модулированного блоком 8.
Первый 25 и второй 12 демодуляторы обеспечивают демодуляцию принятого сигнала, если он оказался "своим", т.е. закодированным модулятором 8.
Второй индикатор 15 обеспечивает выработку информации (визуальной, звуковой) о том, что второй объект (блок 7) обнаружен и опознается "своим" объектом. Оператор (экипаж) второго объекта 7 в этом случае может войти в связь (например, по радио) с первым объектом и подтвердить свою принадлежность, благодаря чему повышается достоверность обнаружения и опознавания.
Первый индикатор 16 обеспечивает выработку и передачу оператору 13 через оптическую формирующую систему 14 информации о том: "свой" или "чужой" объект обнаружен и опознается.
Диафрагма 17 в нормальном положении закрыта. Она открывается и обеспечивает пропуск "своего" излучения на уголковый отражатель 23 после поступления на ее вход и выход блока 11 именно "своего" излучения (от "своего" объекта). Время ее открытого состояния определяется с помощью реле времени 18.
Блок сравнения 21 обеспечивает сравнение временных сигналов с выходов блоков 10 и 22. Если эти сигналы одинаковы, то с выхода блока сравнения 21 на вход первого индикатора 16 подается сигнал, что обнаруженный объект "свой". Если же сравниваемые сигналы (с выходов блоков 10 и 22) по времени не одинаковы, то с выхода блока 21 на выход блока 16 подается сигнал, что обнаруженный объект "чужой".
Измеритель временный интервалов 22 обеспечивает измерение длительности действия отраженного лазерного излучения, определяемого временем открытого состояния диафрагмы 17, и подачу его на выход блока сравнения 21.
Уголковый отражатель 23 обеспечивает отражение направленного на него через диафрагму 17 лазерного излучения. Исполнение и применение его широко известны (Гришин Ю.П. Ипатов В.П. Казаринов Ю.М. и др. Радиотехнические системы. М. Высшая школа, 1990. с. 417-422.).
Привод 24 диафрагмы 17 обеспечивает ее открывание и закрывание при подаче на него сигнала с выхода второго реле времени 18. Время открытого состояния диафрагмы 17 также определяется вторым реле времени 18, для чего это значение предварительно устанавливается в нем оператором второго объекта 7. Установленное значение времени является кодом "своего" объекта. Для того, чтобы его опознать, на первом реле времени 10 должно быть установлено такое же значение времени. За основу выполнения привода 24 может быть принят механизм фотографического затвора (Воробей П.С. В помощь фотолюбителю. Минск: Полымя, 1993, с. 8-43).
Работа предложенной системы обнаружения и опознавания происходит следующим образом. Оператор 13 объекта 1, включив элементы системы обнаружения и опознавания, расположенные на первом объекте, производит осмотр района предлагаемого нахождения искомого объекта путем перемещения оптической формирующей системы 14 посредством привода наведения 20 и пульта управления 19. Обнаружив искомый объект 7, оператор совмещает с ним визирный индекс (прицельную марку) оптической формирующей системы 14 и с помощью дальномера 3 измеряет дальность до объекта, информация о которой подается на входы блоков 2, 5 и 6. С первого выхода блока дальности сигнал (как правило, в аналоговой форме поступает на вход привода панкратической системы 5, который обеспечивает перемещение подвижных элементов панкратической системы 9 и установку заданной величины диаметра сечения лазерного луча, совпадающего (по дальности) с обнаруженным объектом 7. С второго выхода дальномера 3 сигнал подается на вход задатчика времени излучения 6. Величина сигнала определяется выражением (1). Кодированные значения времени tЗ и tПД подаются на второй вход блока 6 с выхода первого реле времени 10. А с третьего выхода дальномера 3 сигнал, соответствующий измеренной дальности, в цифровой форме подается на вход индикатора дальности 2 для информации оператора 13 через оптическую формирующую систему 14 об измеренной дальности (для контроля). Убедившись в правильности измерения дальности, оператор совмещает визирный индекс (прицельную марку) оптической формирующей системы 14 с уголковым отражателем 23, место нахождения которого оператору известно заранее, и включает источник лазерного излучения 4, оптическая ось которого съюстирована с оптической осью оптической формирующей системы 14. Как и в прототипе непрерывный лазерный луч модулируется (блоком 8) и действует как волна, несущая кодированные сигналы (Латухин А.Н. Противотанковое вооружение. М. Воениздат, 1974, с. 230-235). Лазерный луч проходит в оптической формирующей системе 14 через фокусирующую линзу, а затем через смеситель, обеспечивающий настройку лазерного луча в соответствии с оптической линией визирования. Линия визирования и лазерный луч с помощью стабилизированных зеркал удерживаются строго параллельно, практически соосно, и в течение всего опознавания удерживаются (оператором) на опознаваемом объекте 7 (на уголковом отражателе 23 и втором приемнике лазерного излучения 11). Луч модулируется (блоком 8) таким образом, чтобы второй приемник лазерного излучения 11, как и в прототипе, мог его "опознать" как от "своего" передающего объекта и пропустить через второй демодулятор 12 на последующие элементы опознаваемого объекта 7. Второй приемник лазерного излучения 11 (как и первый 26) является аналогом приемника лазерного излучения прототипа, устанавливаемого на управляемой ракете. При появлении на входе второго реле времени 18 "своего" сигнала оно формирует на своем выходе сигнал, длительность которого соответствует установленному на втором реле времени значению tЗ. По этому сигналу срабатывает привод диафрагмы 24, открывая диафрагму и обеспечивая пропуск лазерного излучения через открытую диафрагму 17 на уголковый отражатель 23. Информация об этом с второго выхода привода диафрагмы 24 поступает на второй индикатор 15, что сигнализирует экипажу второго объекта 7 о поступлении запроса со "своего" объекта. За время открытого состояния диафрагмы 17 лазерный луч отражается от уголкового отражателя 23 и возвращается на первый объект 1, на первый приемник лазерного излучения 26, с которого через первый демодулятор 25 подается на вход измерителя временных интервалов 22, который обеспечивает измерение длительности поданного сигнала и измеренное значение его длительности подает на первый вход блока сравнения 21, на второй вход которого подается сигнал с второго выхода первого реле времени 10 и соответствующего заданному значению времени tЗ (см. выражение 1). При равенстве сигналов на первом и втором входах блока 21 с его выхода снимается и передается на первый индикатор сигнал о том, что опознаваемый объект "свой". В противном случае делается вывод о том, что опознаваемый объект не является "своим".
Введение в известную систему обнаружения и опознавания средств измерения дальности (дальномер 3, индикатор дальности 2) и управления расходимостью лазерного луча (панкратической системы 9 и ее привода 5) позволяет оптимизировать по дальности энергетические характеристики лазерного луча и благодаря этому повысить надежность передачи и получения информации о принадлежности объекта. Введение уголкового отражателя 23 и остальных элементов и связей позволило с помощью простых средств получить информацию о принадлежности объекта и обойтись без активных, дорогостоящих демаскирующих средств связи (например, радиостанций). Средства, устанавливаемые на втором объекте, позволяют получить необходимую информацию без участия экипажа самого объекта. Это особенно важно в тех случаях, когда объект поврежден, а экипаж полностью или частично вышел из строя. Эффективно использование предложенной системы и для обозначения гнезд раненых, пунктов сбора поврежденных машин и др. Использование предложенной системы эффективно практически на всех объектах военной техники: в авиации, ПВО, Сухопутных войсках и др.
Производство предложенной системы не вызывает затруднений. Все элементы этой системы производятся на предприятиях МО и предприятиях оборонной промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ | 1996 |
|
RU2115955C1 |
| СИСТЕМА СПАСЕНИЯ И ЭВАКУАЦИИ | 2001 |
|
RU2186554C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 1996 |
|
RU2102684C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА | 1996 |
|
RU2107250C1 |
| СПОСОБ ДИСТАНЦИОННОГО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2108617C1 |
| ЭЛЕКТРООПТИЧЕСКИЙ БЛОК СО*002-ЛАЗЕРА С ПОПЕРЕЧНОЙ ПРОКАЧКОЙ РАБОЧЕЙ СМЕСИ ГАЗОВ | 1996 |
|
RU2093940C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1994 |
|
RU2090004C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103723C1 |
Изобретение относится к средствам управления, а точнее к системам поиска, обнаружения, опознавания и слежения. Сущность изобретения: на обнаруживающем и опознающем объекте установлены источник лазерного излучения, модулятор, пульт управления, привод наведения и оптическая формирующая система, а также введенные индикатор дальности, реле времени, задатчик времени излучения, дальномер, оптически взаимосвязанный с обнаруживаемым и опознаваемым объектом, панкратическая система с приводом, приемник лазерного излучения, демодулятор, измеритель временных интервалов, блок сравнения и индикатор, а на обнаруживаемом и опознаваемом объекте размещены второй индикатор, уголковый отражатель с диафрагмой и последовательно соединенные приемник лазерного излучения, демодулятор, реле времени, привод диафрагмы, индикатор, что позволяет оператору опознать "свой" объект. 1 ил.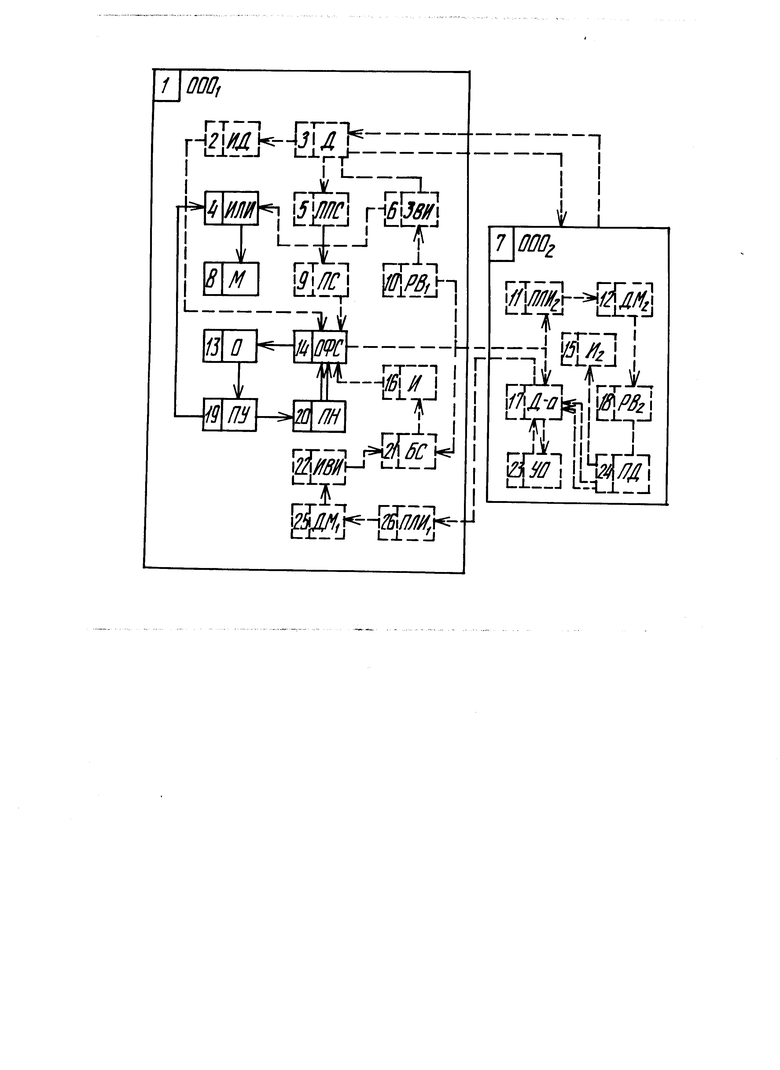
Система обнаружения и опознавания, содержащая установленные на обнаруживающем и опознающем объекте источник лазерного излучения и соединенный с его выходом модулятор, последовательно соединенные пульт управления, второй выход которого соединен с первым входом источника лазерного излучения, привод наведения и оптическую формирующую систему, отличающаяся тем, что введены размещенные на объекте индикатор дальности, выход которого оптически соединен с вторым входом оптической формирующей системы, первое реле времени, задатчик времени излучения, первый вход которого соединен с первым выходом первого реле времени, а выход с вторым входом источника лазерного излучения, соединенные последовательно дальномер, оптически взаимосвязанный с обнаруживаемым и опознаваемым объектом, второй выход которого соединен с вторым входом задатчика времени излучения, а третий с входом индикатора дальности, привод панкратической системы и панкратическая система, второй вход которой оптически соединен с выходом модулятора, а выход с третьим входом оптической формирующей системы, последовательно соединенные первый приемник лазерного излучения, первый демодулятор, измеритель временных интервалов, блок сравнения, с вторым входом которого соединен второй выход первого реле времени и первый индикатор, выход которого оптически соединен с четвертым входом оптической формирующей системы, а также введены размещенные на обнаруживаемом и опознаваемом объекте второй индикатор, уголковый отражатель с диафрагмой, связанный оптически через нее с выходом оптической формирующей системы и входом первого приемника лазерного излучения, и последовательно соединенные второй приемник лазерного излучения, вход которого оптически соединен с выходом оптической формирующей системы, второй демодулятор, второе реле времени и привод диафрагмы, первый выход которого соединен механически с диафрагмой, а второй электрически с входом второго индикатора.
| Латухин А.Н | |||
| Противотанковое вооружения | |||
| - М.: Воениздат, 1974, с | |||
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
