Изобретение относится к компьютерной технике, робототехнике, телевидению и может быть использовано при дистанционном вводе информации в телевизор, компьютер, тренажер или иной управляемый объект.
Известен способ ввода информации в объект управления (компьютер), в котором управляют изображением или его фрагментом, посредством, например, специального приспособления типа мышь [1].
В традиционном варианте мышь перемещается по горизонтальной поверхности, например, стола и ее положение определяет положение курсора на экране компьютера. Таким образом, вводимая информация оказывается принципиально двумерной. Это ограничивает применение мыши при управлении параметрами компьютерного объемного, стереоскопического или квазиобъемного (т.е. обычного плоского, но учитывающего перспективу) изображения, а также при управлении через компьютер трехмерными роботами, манипуляторами и иными управляемыми объектами.
Кроме того, наличие кабеля затрудняет управление и ограничивает возможности оператора. Поэтому предпринимаются усилия по созданию способов для ввода информации в объект управления, например, компьютер, использующих устройства, не связанные с объектом управления кабелем, проводами и т.д.
Известны способ ввода информации в объект управления и устройство для его реализации [2].
При реализации известного способа осуществляют оптическое зондирование области расположения бесконтактной оптической мыши с закрепленным на ней рефлектором, получают разнесенные в пространстве три одномерных действительных оптических изображения зондируемого пространства с изображением на них рефлектора, определяют текущие значения пространственных координат рефлектора по параллаксу его изображения на трех одномерных действительных изображениях зондируемого пространства.
Известное устройство ввода информации в объект управления содержит бесконтактную (т. е. перемещаемую в пространстве без контакта с опорной поверхностью) мышь с размещенным на ней рефлектором и стационарный приемо-передающий блок, который включает источник зондирующих импульсов, разнесенные в пространстве и имеющие волновую связь с рефлектором три канала формирования одномерных действительных изображений зондируемого пространства, микропроцессор, интерфейс связи микропроцессора с компьютером.
При использовании акустического излучения между бесконтактной мышью и стационарным приемо-передающим блоком точность определения положения мыши в пространстве мала, поскольку сравниваются абсолютные значения сигналов, принимаемых по крайней мере тремя приемниками излучения, и поскольку эти значения могут зависеть от посторонних факторов, например, ориентации мыши в реальном помещении с посторонними предметами, отражения акустической волны от посторонних предметов, воздействия посторонних акустических источников и т. д.
При использовании электромагнитного (в том числе оптического) излучения между мышью и стационарным приемо-передающим блоком точность определения положения мыши в пространстве ограничивается числом чувствительных площадок многоэлементного приемника излучения, шириной щели и наличием зоны светотени на чувствительных площадках приемника излучения. Причем, при уменьшении ширины щели и, соответственно, увеличении точности определения координат уменьшается мощность излучения, падающего на чувствительную площадку приемника излучения, что в свою очередь либо уменьшает дальность действия устройства (расстояние между пультом управления и приемным блоком), либо требует увеличения мощности источника излучения, т.е. увеличивает энергопотребление и габариты источника питания и всей бесконтактной мыши в целом.
Кроме того, в известном устройстве в качестве вводимой информации используется только один параметр - величина пространственных координат контррефлектора, что ограничивает возможности применения бесконтактной мыши при взаимодействии с графическими пакетами программ, сложными "меню", "окнами", при прецизионном управлении роботами и манипуляторами.
Наиболее близкими по технической сущности и достигаемому эффекту являются принимаемые нами за прототип способ ввода информации в объект управления, включающий задание характера управляющих воздействий путем кодирования сигнала пакетами импульсов с заданными параметрами и задание интенсивности управляющих воздействий по длительности передачи кодированного сигнала, а также устройство для реализации способа, содержащее стационарный блок с блоком приема и обработки управляющего сигнала и дистанционный пульт управления с блоком формирования управляющего сигнала, имеющим источник управляющего сигнала [3].
Дистанционный пульт управления не связан с объектом управления кабелем, однако, данный способ сложен для осуществления непрерывного ввода информации в объект управления, а также не позволяет изменять интенсивность управляющего воздействия в зависимости от пространственных координат, например, руки оператора, что необходимо при выполнении различных производственных операций.
Целью изобретения является введение пропорционального управляющего воздействия в объект управления посредством изменения пространственного положения бесконтактной оптической мыши.
Целью изобретения является также расширение функциональных возможностей бесконтактной оптической мыши путем использования шести ее степеней свободы.
Кроме того, целью изобретения является увеличение дальности действия и помехозащищенности бесконтактной оптической мыши.
Предлагаемый способ ввода информации в объект управления включает задание характера управляющих воздействий и их интенсивности.
В отличие от прототипа при реализации способа выполняют следующие операции:
осуществляют оптическое зондирование области расположения бесконтактной оптической мыши с закрепленными на ней активным источником оптического излучения и одним и более контррефлекторами,
получают разнесенные в пространстве линейное одномерное и плоское двумерное действительные оптические изображения зондируемого пространства с изображениями на них контррефлекторов, при этом протяженность линейного одномерного действительного изображения коллинеарна одному из измерений плоского двумерного действительного изображения,
определяют текущие значения пространственных координат контррефлекторов, при этом угловые координаты контррефлекторов определяют по положению их изображений на плоском двумерном действительном изображении зондируемого пространства, а координату их дальности определяют по величине параллакса их изображений на линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства,
характер управляющих воздействий задают параметрами излучения активного источника оптического излучения,
интенсивность воздействия определяют по векторной величине разности пространственных координат контррефлекторов в момент ввода параметра излучения и в текущий момент,
параметры излучения активного источника оптического излучения и текущие значения пространственных координат контррефлекторов вводят в объект управления раздельно друг от друга.
В качестве величины интенсивности воздействия может быть использована векторная величина разности пространственных координат в момент начала ввода параметра излучения и в текущий момент, как самих контррефлекторов, так и геометрического центра области их расположения.
Пространственные координаты геометрического центра области расположения контррефлекторов определяют по их пространственным координатам.
При реализации способа может быть создано дополнительное одномерное действительное изображение зондируемого пространства, причем его протяженность перпендикулярна протяженности одномероного действительного изображения.
При реализации способа могут определять значения углов поворота бесконтактной оптический мыши относительно трех взаимно перпендикулярных пространственных осей, проходящих через бесконтактную оптическую мышь и коллениарных осям трехмерной системы координат, и вводить значения углов поворота бесконтактной оптической мыши в качестве информации в объект управления.
Это расширит функциональные возможности бесконтактной оптической мыши путем использования всех шести ее степеней свободы.
Протяженность одномерного действительного изображения может быть параллельна горизонтальной оси ортогональной системы координат, а протяженность дополнительного одномерного действительного изображения параллельна вертикальной оси ортогональной системы координат, при этом двумерное действительное изображение разнесено в пространстве с одномерным действительным изображением в горизонтальном измерении, а с дополнительным одномерным действительным изображением - в вертикальном измерении.
В этом случае:
угол поворота бесконтактной оптической мыши вокруг вертикальной оси определяют по отношению параллаксов изображений двух контррефлекторов на линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства,
угол поворота бесконтактной оптической мыши относительно горизонтальной оси, перпендикулярной плоскому двумерному действительному изображению, определяют по отношению разностей горизонтальных и вертикальных координат двух контррефлекторов в плоском двумерном действительном изображении зондируемого пространства,
угол поворота бесконтактной оптической мыши относительно горизонтальной оси, параллельной плоскому двумерному действительному изображению, определяют по отношению параллаксов изображений двух контррефлекторов на дополнительном линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства.
Частота посылки зондирующих импульсов может быть установлена равной половине частоты обновления информации о действительных изображениях зондируемого пространства.
Начало и окончание подачи зондирующих импульсов любого приемного канала может быть синхронизировано с началом и окончанием приема отраженных от контррефлекторов оптических сигналов.
Начало зондирующего импульса в каждом из каналов должно быть после окончания времени анализа действительного изображения соответствующего приемного канала. Зондирующие импульсы любого из приемных каналов могут быть как синхронизированы, так и не синхронизированы с работой других каналов.
Длительности зондирующих импульсов и соответствующие им времена приема отраженных оптических сигналов могут быть установлены пропорциональными квадрату дальности бесконтактной оптической мыши.
При определении азимутальной координаты геометрического центра области расположения контррефлекторов в одномерном и двумерном действительных изображениях в интервале от начала области расположения изображения контррефлекторов до ее конца при считывании тактов тактовая частота может быть снижена в два раза, а после прохождения области расположения изображения контррефлекторов посылку тактовых импульсов прекращают до начала следующей строки данного кадра.
При определении угломестной координаты геометрического центра области расположения контррефлекторов в дополнительном одномерном и двумерном действительных изображениях в интервале от начала области расположения изображения контррефлекторов до ее конца счет строк могут ввести через одну строку, а после прохождения области расположения изображения контррефлекторов посылку тактовых импульсов прекращают до начала следующего кадра.
Устройство ввода информации в объект управления содержит стационарный блок с блоком приема и обработки управляющего сигнала и дистанционный пульт управления с блоком формирования управляющего сигнала, имеющим источник управляющего сигнала.
В отличие от прототипа в устройстве:
дистанционный пульт управления выполнен в виде бесконтактной оптической мыши с размещенным в ней в непосредственной близости от источника управляющего сигнала первым контррефлектором,
стационарный блок выполнен приемо-передающим и включает разнесенные в пространстве и оптически связанные с первым контррефлектором первый и второй каналы формирования действительных изображений зондируемого пространства, оптические оси которых коллинеарны друг другу, при этом первый из них является каналом одномерного действительного изображения, а второй - каналом двумерного действительного изображения.
Стационарный приемо-передающий блок включает процессор сигналов, интерфейс, генератор импульсов, первый и второй источники зондирующих импульсов, имеющие с первым контррефлектором оптическую связь, а с входами каналов действительного изображения и входом блока приема и обработки управляющего сигнала - оптически разделенные.
Первый и второй источники зондирующих импульсов расположены в непосредственной близости от оптических входов, соответственно, первого и второго каналов формирования действительного изображения зондируемого пространства, а входы первого и второго источников зондирующих импульсов электрически соединены соответственно с первым и вторым выходами генератора импульсов, первый вход которого электрически соединен с вторым выходом процессора сигналов.
Выходы первого и второго каналов формирования действительного изображения зондируемого пространства электрически соединены соответственно с первым и вторым входами процессора сигналов, первый выход процессора сигналов электрически соединен с входом интерфейса, выход интерфейса электрически соединен с входом объекта управления, первый контррефлектор имеет оптическую связь с источниками зондирующих импульсов и с входами каналов формирования действительного изображения.
Выход блока формирования управляющего сигнала оптически разделен с входами каналами формирования действительного изображения и оптически связан с входом блока приема и обработки управляющего сигнала, выход которого электрически соединен с третьим входом процессора сигналов, а вход оптически разделен с первым контррефлектором.
Выполнение одного из каналов формирования действительного изображения зондируемого пространства каналом плоского двумерного изображения позволяет определить угловые координаты контррефлекторов и, соответственно, бесконтактной оптической мыши по положению изображений контррефлекторов на плоском двумерном действительном изображении зондируемого пространства без использования параллакса, при этом точность определения угловых координат определяется лишь конструкцией (в том числе числом приемных элементов, их размером, расстоянием между отдельными элементами и т.д.), и поэтому она может быть значительно выше, чем у прототипа с реальным (близким к размеру монитора компьютера) расстоянием между приемными устройствами.
Устройство ввода информации в объект управления может быть выполнено таким образом, что:
стационарный приемо-передающий блок содержит третий канал формирования действительного изображения зондируемого пространства, выполненный как канал линейного одномерного действительного изображения, оптическая ось которого находится вне плоскости, проходящей через оптические оси первого и второго каналов действительного изображения, причем выход третьего канала действительного изображения электрически соединен с четвертым входом процессора сигналов,
устройство содержит расположенный в непосредственной близости от входа третьего канала формирования действительного изображения третий источник зондирующих импульсов,
бесконтактная оптическая мышь содержит второй контррефлектор, размещенный на заданном расстоянии В от первого, оптически связанный с источниками зондирующих импульсов и с входами каналов действительного изображения и оптически разделенный с входом блока приема и обработки управляющего сигнала,
третий источник зондирующих импульсов оптически связан с контррефлекторами и оптически разделен с входами каналов формирования действительного изображения и блока приема и обработки управляющего сигнала.
С целью увеличения дальности действия бесконтактной оптической мыши источники зондирующих импульсов могут быть выполнены многоэлементными, причем элементы источников зондирующих импульсов равномерно расположены вокруг входов каналов формирования действительного изображения зондируемого пространства на минимальном радиальном расстоянии относительно оптической оси соответствующего канала. Это позволяет максимально увеличить передачу излучаемой мощности в направлении бесконтактной оптической мыши.
Устройство ввода информации в объект управления может быть выполнено таким образом, что первый, второй и третий каналы формирования действительного изображения содержат, соответственно, первый, второй и третий оптические затворы, первый, второй и третий объективы, первый и третий из которых имеют плоскостную симметрию, а второй имеет осевую симметрию, первую одномерную, вторую двумерную и третью одномерную матрицы оптических приемников, первый, второй и третий блоки опроса. Затвор, объектив и матрица оптических приемников каждого из каналов формирования действительного изображения связаны между собой оптически. Матрицы оптических приемников и блоки опроса каждого из каналов формирования действительного изображения зондируемого пространства связаны между собой электрически. Выход первого блока опроса, первый выход второго блока опроса и выход третьего блока опроса электрически соединены соответственно с первым, вторым и четвертым входами процессора сигналов. Третий, четвертый и пятый выходы генератора импульсов связаны электрически с входами, соответственно, первого, второго и третьего оптических затворов, а второй выход второго блока опроса электрически соединен с вторым входом генератора импульсов.
Для решения поставленной задачи увеличения помехозащищенности бесконтактной оптической мыши относительно посторонних засветок источники зондирующего излучения выполнены импульсными, а перед объективами каналов формирования действительного изображения расположены оптические затворы, выполненные, например, на жидких кристаллах. При этом работа оптических затворов синхронизирована с работой источников зондирующих сигналов, что позволяет открывать затворы только в моменты времени включения источников.
Вторая двумерная матрица оптических приемников может быть выполнена в виде телевизионного датчика.
Блок формирования управляющего сигнала может содержать последовательно электрически соединенные друг с другом кнопочный переключатель, модулятор управляющего сигнала, усилитель мощности и источник управляющего сигнала, а блок приема управляющего сигнала содержит четвертый объектив, оптический приемник управляющего сигнала и электрически связанный с ним демодулятор управляющего сигнала.
Модулятор управляющего сигнала может быть выполнен в виде модулятора фазы, модулятора амплитуды, модулятора частоты, кодера импульсов управляющего сигнала, а демодулятор управляющего сигнала в этом случае будет выполнен в виде демодулятора фазы, демодулятора амплитуды, демодулятора частоты, декодера импульсов управляющего сигнала.
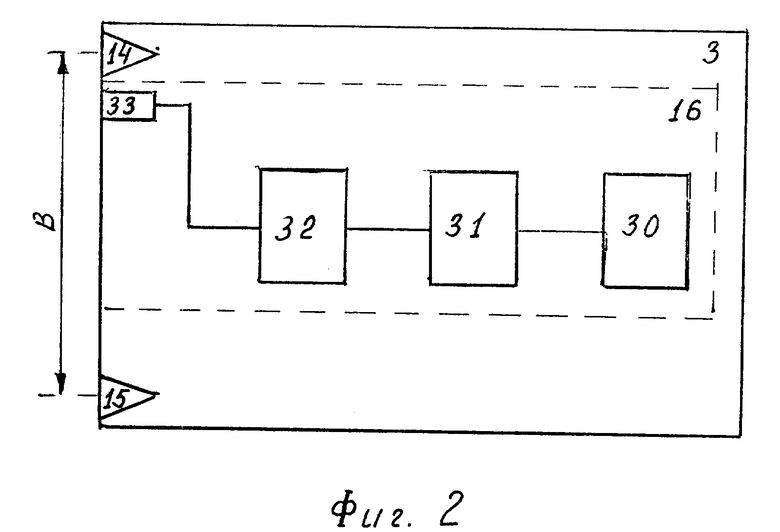
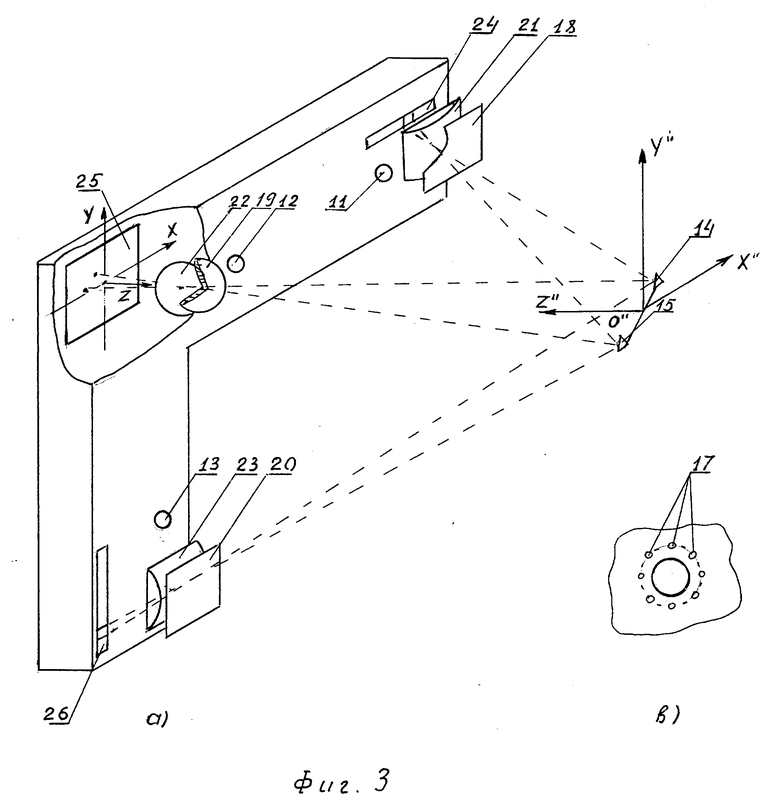
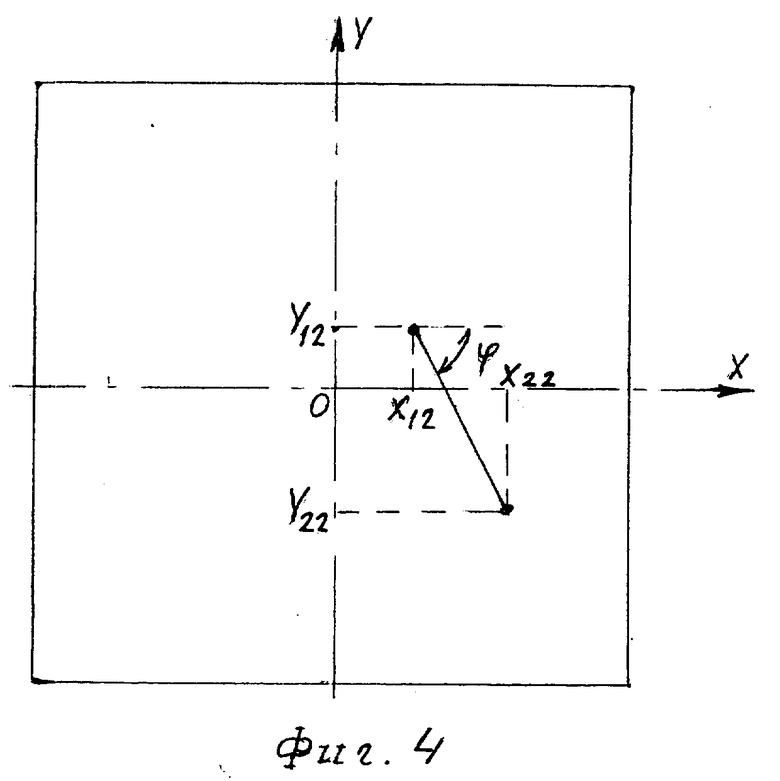
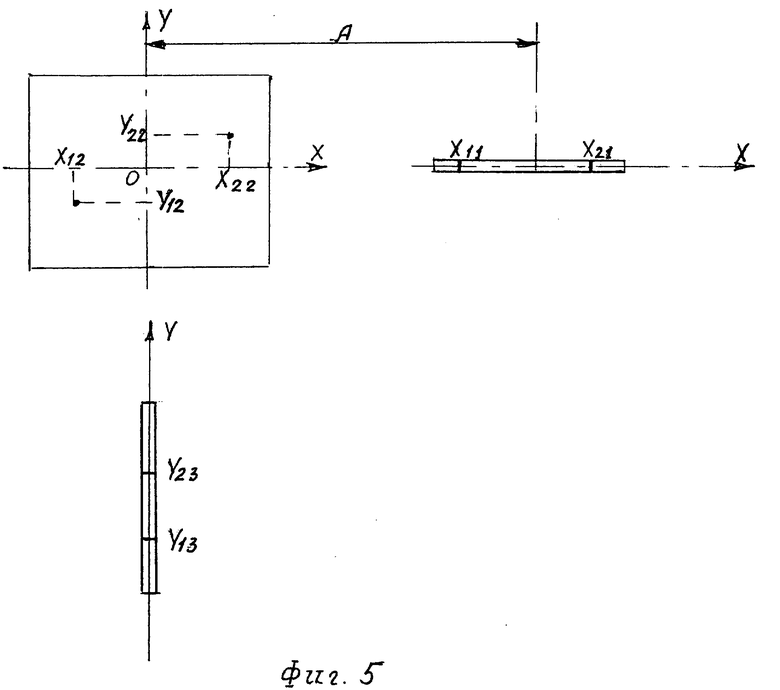
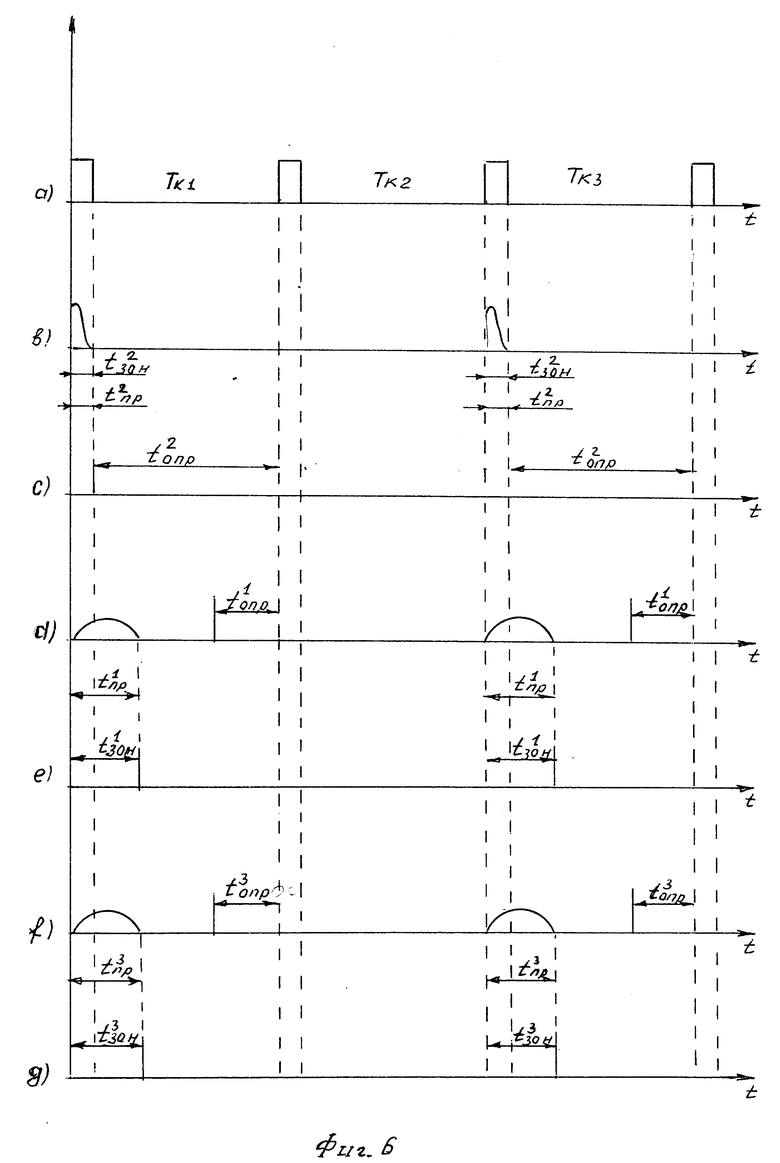
На фиг.1 изображена блок-схема устройства, реализующего способ ввода информации в объект управления (компьютер); на фиг.2 - блок-схема бесконтактной оптической мыши; на фиг.3 -вариант взаимного расположения каналов формирования действительного изображения зондируемого пространства, а также иллюстрируется получение двумерного, одномерного и дополнительного одномерного действительных изображений зондируемого пространства с проекциям на них контррефлекторов; на фиг.4 - схема определения угла поворота бесконтактной оптической мыши относительно горизонтальной оси, перпендикулярной плоскому двумерному действительному изображению; на фиг.5 - схема определения угла поворота бесконтактной оптической мыши относительно вертикальной оси и угла поворота относительно горизонтальной оси, параллельной плоскому двумерному действительному изображению; на фиг.6 - временная диаграмма, иллюстрирующая процесс оптического зондирования пространства вероятного расположения бесконтактной оптической мыши.
Пример. Способ введения информации в объект управления может быть реализован с помощью устройства, блок- схема которого представлена на фиг.1.
Устройство ввода информации в объект управления, например в компьютер 1, содержит стационарный приемо-передающий блок 2 и дистанционный пульт управления, выполненный в виде бесконтактной оптической мыши 3.
Стационарный приемо-передающий блок 2 включает блок приема и обработки управляющего сигнала 4, разнесенные в пространстве первый 5, второй 6 и третий 7 каналы формирования действительного изображения, генератор импульсов 8, процессор сигналов 9, интерфейс 10, первый 11, второй 12 и третий 13 источники зондирующих импульсов.
Бесконтактная оптическая мышь 3 (фиг.2) содержит первый 14 и второй 15 контррефлекторы и блок формирования управляющего сигнала 16.
Оптические оси каналов формирования действительного изображения коллинеарны друг другу и не лежат в одной плоскости.
Первый 5 и третий 7 каналы формирования действительного изображения выполнены как каналы линейного одномерного действительного изображения.
Второй 6 канал формирования действительного изображения выполнен как канал плоского двумерного действительного изображения.
Первый 11, второй 12 и третий 13 источники зондирующих импульсов расположены в непосредственной близости от оптических входов 18, 19, 20 соответственно первого 5, второго 6 и третьего 7 каналов формирования действительного изображения зондируемого пространства (фиг.3 а).
Источники зондирующих импульсов выполнены многоэлементными, причем элементы 17 источников зондирующих импульсов равномерно расположены вокруг входов каналов формирования действительного изображения зондируемого пространства на минимальном радиальном расстоянии относительно оптических осей каналов (фиг.3 в).
Первый 14 и второй 15 контррефлекторы размещены на бесконтактной оптической мыши 3 на заданном расстоянии В друг от друга, имеют оптическую связь с источниками зондирующих импульсов 11, 12, 13 и с входами каналов формирования действительного изображения 5, 6, 7 и оптически разделены с входом блока приема и обработки управляющего сигнала 4.
Источники зондирующих импульсов 11, 12, 13 с входами каналов действительного изображения 5, 6, 7 и входом блока приема и обработки управляющего сигнала 4 оптически разделены.
Выход блока формирования управляющего сигнала 16 оптически разделен с входами каналов формирования действительного изображения 5, 6, 7 и оптически связан с входом блока приема и обработки управляющего сигнала 4.
Входы первого 11, второго 12 и третьего 13 источников зондирующих импульсов электрически соединены соответственно с первым, вторым и третьим выходами генератора импульсов 8.
Первый вход генератора импульсов 8 электрически соединен с вторым выходом процессора сигналов 9.
Выходы первого 5, второго 6 и третьего 7 каналов формирования действительного изображения зондируемого пространства электрически соединены соответственно с первым, вторым и четвертым входами процессора сигналов 9.
Первый выход процессора сигналов 9 электрически соединен с входом интерфейса 10. Выход интерфейса 10 электрически соединен с входом компьютера 1. Выход блока приема и обработки управляющего сигнала 4 электрически соединен с третьим входом процессора сигналов 9.
Первый 5, второй 6 и третий 7 каналы формирования действительного изображения содержат, соответственно, первый 18, второй 19 и третий 20 оптические затворы, первый 21, второй 22 и третий 23 объективы, первый 21 и третий 23 из которых имеют плоскостную симметрию, а второй 22 имеет осевую симметрию, первую одномерную 24, вторую двумерную 25 и третью одномерную 26 матрицы оптических приемников, первый 27, второй 28 и третий 29 блоки опроса, причем затвор, объектив и матрица оптических приемников каждого из каналов формирования действительного изображения зондируемого пространства связаны между собой оптически, матрицы оптических приемников и блоки опроса каждого из каналов формирования действительного изображения зондируемого пространства связаны между собой электрически.
Плоскости симметрии первого 21 и третьего 23 объективов и оси первой 24 и третьей 26 матриц оптических приемников ориентированы взаимно перпендикулярно.
Выход первого блока опроса 27, первый выход второго блока опроса 28 и выход третьего блока опроса 28 электрически соединены соответственно с первым, вторым и четвертым входами процессора сигналов 9.
Четвертый, пятый и шестой выходы генератора импульсов 8 связаны электрически с входами, соответственно, первого 18, второго 19 и третьего 20 оптических затворов.
Второй выход второго блока опроса 28 электрически соединен с вторым входом генератора импульсов 8.
Блок формирования управляющего сигнала 16 содержит последовательно электрически соединенные друг с другом кнопочный переключатель 30, модулятор управляющего сигнала, выполненный в виде кодера импульсов управляющего сигнала 31, усилитель мощности 32 и источник управляющего сигнала 33, а блок приема и обработки управляющего сигнала 4 содержит четвертый объектив 34, четвертую матрицу оптических приемников 35, демодулятор управляющего сигнала, выполненный в виде декодера импульсов управляющего сигнала 36.
Источники зондирующих импульсов 11, 12, 13 могут быть выполнены на основе светоизлучающих диодов, например, светодиода АЛ107Г, излучающего в инфракрасной области спектра.
Первая 24 и третья 26 матрицы оптических приемников выполнены в виде линеек фоточувствительных элементов на основе ПЗС с числом элементов не менее 512, например, К1200ЦЛ1 с числом элементов 1000.
Вторая двумерная матрица оптических приемников 25 выполнена в виде телевизионного датчика на основе матрицы приемников излучения на ПЗС, например, марки А-1157 с числом элементов по горизонтали и вертикали соответственно 582 и 500 и размерами элемента 17x11 мкм2.
При реализации способа все многообразие управляющих воздействий разделяется на два типа: характер (вид) и интенсивность (степень) управляющих воздействий.
Каждый из типов воздействия осуществляется различными техническими средствами: характер управляющих воздействий (перемещение, поворот, изменение масштаба, цвета и т.д.) задается параметрами излучения источника управляющего сигнала 33.
В процессе реализации способа ввода информации в компьютер 1 оператор (на чертежах не показан), воздействуя на кнопочный переключатель 30 блока формирования управляющего сигнала 16 и выбирая тот или иной характер предусмотренных управляющих воздействий, при выполнении модулятора управляющего сигнала, например, в виде кодера 31, задает тот или иной код сигнальной посылки для источника управляющего сигнала 33.
Распространяясь в широком телесном угле, кодированный управляющий сигнал попадает через четвертый объектив 34 на оптический приемник управляющего сигнала 35. Превратившись в оптическом приемнике управляющего сигнала 35 из оптической формы в электрическую, управляющий сигнал поступает на декодер 36. С декодера 36 декодированный управляющий сигнал поступает в процессор сигналов 9.
Условие, согласно которому параметры излучения источника управляющего излучения 33 и текущие значения пространственных координат контррефлекторов 14 и 15 вводят в компьютер 1 раздельно друг от друга, выполняется как в случае закрытого, так и в случае открытого состояний оптических затворов 18, 19, 20. В случае, когда в момент ввода управляющего сигнала в блок приема и обработки 4 источники зондирующих импульсов 11, 12, 13 посылают зондирующие импульсы, а оптические затворы 18, 19, 20 находятся в открытом состоянии для приема ответных сигналов, на матрицах 24, 25, 26 оптических приемников наряду с изображениями первого и второго контррефлекторов 14 и 15 появится и изображение источника управляющего сигнала 33. Для того, чтобы это дополнительное изображение не вызвало сбой в работе каналов формирования действительного изображения 5, 6, 7, источник управляющего сигнала 33 на бесконтактной оптической мыши 3 располагают в непосредственной близости от первого 14 контррефлектора. В этом случае оптические изображения источника управляющего сигнала 33 и контррефлектора 14 соединяются в одно изображение, не приводя к сбою в работе устройства.
Управляющие воздействия могут, например, обеспечивать:
задание режима выделения некоторого объема (фрагмента) из трехмерного изображения;
задание режима пространственного перемещения курсора или выбранного фрагмента изображения по трем координатам;
задание режима изменения скорости движения выделенного фрагмента изображения вдоль по любой из координат или в произвольном направлении;
задание режима вращения выделенного фрагмента изображения вокруг любой из трех осей или их комбинации;
задание режима изменения масштаба изображения или его фрагмента независимо по каждой из координат;
задание режима изменения яркости и цвета изображения или его фрагмента;
задание режима изменения силы звука и тембра звукового сопровождения, а также осуществлять другие управляющие воздействия.
Интенсивность (степень) воздействия (направление и величина смещения, направление вращения и величина угла поворота, величина масштаба по каждой из координат, степень насыщенности по каждой из трех цветовых компонент и т. д.) определяют по векторной величине разности пространственных координат контррефлекторов в момент ввода параметра излучения и в текущей момент, при этом в качестве величины интенсивности воздействия может быть использована как непосредственно векторная величина разности пространственных координат контррефлекторов в момент начала ввода параметра излучения и в текущий момент, так и векторная величина разности пространственных координат геометрического центра области их расположения.
Для осуществления возможности регулирования интенсивности (степени) воздействия в процессе реализации способа ввода информации в компьютер 1 производят оптическое зондирование некоторой рабочей зоны области пространства.
Излучение от источников зондирующих импульсов 11, 12, 13, размещенных в непосредственной близости от входов каналов формирования действительного изображения 5, 6, 7, распространяется в некотором телесном угле (рабочей зоне) и достигает контррефлекторов 14 и 15 бесконтактной оптической мыши 3. Контррефлекторы 14 и 15 отражают излучение в направлении источников зондирующих импульсов 11, 12, 13 и, поскольку входные апертуры каналов формирования действительного изображения 5, 6, 7 находятся в непосредственной близости от источников зондирующих импульсов 11, 12, 13, то отраженное излучение попадает в эти апертуры и засвечивает первую 24, вторую 25 и третью 26 матрицы оптических приемников.
На первой 24, второй 25 и третьей 26 матрицах оптических приемников получают разнесенные в пространстве, соответственно, линейное одномерное, плоское двумерное и дополнительное одномерное действительные оптические изображения зондируемого пространства с изображениями на каждом из них первого 14 и второго 15 контррефлекторов бесконтактной оптической мыши 3, при этом протяженность линейного одномерного действительного изображения коллинеарна горизонтальному измерению плоского двумерного действительного изображения, а протяженность дополнительного одномерного действительного изображения коллинеарна вертикальному измерению плоского двумерного действительного изображения.
Протяженность одномерного действительного изображения параллельна горизонтальной оси ортогональной системы координат, а протяженность дополнительного одномерного действительного изображения параллельна вертикальной оси ортогональной системы координат, при этом двумерное действительное изображение разнесено в пространстве с одномерным действительным изображением в горизонтальном измерении, а с дополнительным одномерным действительным изображением - в вертикальном измерении.
Поскольку плоскость второй 25 двумерной матрицы находятся в фокальной плоскости объектива 22, то угловая координата любой светящейся точки или любого точечного отражателя, например, контррефлектора 14, находящегося в рабочей зоне, будет связана с координатой фотоприемника (Xф2, Yф2) на второй 25 двумерной матрице, зафиксировавшей излучение. После опроса состояния фотоприемников второй 25 двумерной матрицы посредством блока опроса 23 будет зафиксирован тот фотоприемник второй 25 двумерной матрицы, в который попало излучение от контррефлектора 14.
Координаты изображения контррефлектора 14 (X12, Y12) на второй 25 двумерной матрице связаны с угловыми координатами (азимутом α и углом места β) контррефлектора 14 в соответствии с формулами:
где F2 - фокусное расстояние второго 22 объектива. При этом предполагается, что дальность контррефлектора 14 много больше фокусного расстояния F второго 22 объектива.
Координаты изображения контррефлектора 14 (X12, Y12) передаются в процессор сигналов 9 и через интерфейс 10 полученные угловые координаты α,β контррефлектора 14 передаются в компьютер 1.
Угловые координаты (азимут α и угол места β) контррефлектора 15 определяются аналогичным образом.
Координату дальности определяют по величине параллакса изображений контррефлекторов 14 и 15 на линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства.
Координата дальности (D1) контррефлектора 14 определяется по формуле:
D1 = A/((X11 - X12)/F1 - (X01 - X02)/F2) (3)
где A - расстояние между оптическими осями первой 24 и второй 25 матриц оптических приемников (фиг.5);
F1 - фокусное расстояние первого (цилиндрического) объектива 21;
F2 - фокусное расстояние второго (сферического) объектива 22;
X11 и X12 - координаты изображения контррефлектора 14 на соответственно первой 24 и второй 25 матрицах оптических приемников;
X01 и X02 - координаты изображения максимально удаленной точки на соответственно первой 24 и второй 25 матрицах оптических приемников.
Для расширения функциональных возможностей бесконтактной оптической мыши 5 путем использования всех шести ее степеней свободы:
определяют значения углов поворота бесконтактной оптической мыши 3 относительно трех взаимно перпендикулярных пространственных осей (О"X", O"Y", O"Z"), проходящих через бесконтактную оптическую мышь 3 и коллинеарных осям ортогональной системы координат (OX, OY, OZ);
угол поворота ϕ бесконтактной оптической мыши 3 относительно горизонтальной оси О"Z", перпендикулярной плоскому двумерному действительному изображению, определяют по отношению разностей горизонтальных и вертикальных координат контррефлекторов 14 и 15 в плоском двумерном действительном изображении зондируемого пространства, исходя из выражения:
ϕ = (X12 - X22)/(Y12 - Y22) (4)
X12, Y12, X22, Y22 - координаты, соответственно, контррефлекторов 14 и 15, зафиксированные второй двумерной матрицей 25;
угол поворота (ψ) бесконтактной оптической мыши 3 вокруг вертикальной оси О"Y" определяют по отношению параллаксов изображений двух контррефлекторов 14 и 15 на линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства, исходя из выражения:
ψ = K1•(X21 - X22)/(X11 - X12) (5)
где К1 - коэффициент пропорциональности;
X11, X21 - координаты, соответственно, контррефлекторов 14 и 15, зафиксированные первой 24 одномерной матрицей;
X12, X22 - координаты, соответственно, контррефлекторов 14 и 15, зафиксированные второй 25 двумерной матрицей;
угол поворота бесконтактной оптической мыши относительно горизонтальной оси О"X", параллельной плоскому двумерному действительному изображению (τ), определяют по отношению параллаксов изображений двух контррефлекторов на дополнительном линейном одномерном и плоском двумерном действительных изображениях зондируемого пространства, исходя из выражения:
τ = K2•(Y23 - Y22)/(Y13 - Y12) (6)
где К2 - коэффициент пропорциональности;
Y12, Y22 - координаты, соответственно, контррефлекторов 14 и 15, зафиксированные второй 25 двумерной матрицей оптических приемников;
Y13, Y23 - координаты, соответственно, контррефлекторов 14 и 15, зафиксированные третьей 26 одномерной матрицей оптических приемников.
Формулы 1-6 можно рассматривать как алгоритм работы процессора сигналов 9.
Значения углов поворота ψ, ϕ, τ бесконтактной оптической мыши 3 в качестве информации подаются на вход компьютера 1.
На временной диаграмме, изображенной на фиг.6 и иллюстрирующей процесс оптического зондирования пространства вероятного расположения бесконтактной оптической мыши:
Тк1, Тк2, Тк3 - время первого, второго, третьего и т.д. кадров матриц 24, 25, 26 оптических приемников;
t
t
t
Для увеличения помехозащищенности начало и окончание подачи зондирующих импульсов осуществляют синхронно с началом и окончанием приема отраженных от контррефлекторов оптических сигналов т.е., t
Зондирующие импульсы в каждом из каналов (t
Зондирующие импульсы любого из приемных каналов могут быть как синхронизированы, так и не синхронизированы с работой других каналов. На фиг.6 для большей наглядности изображен вариант с синхронизированной работой приемных каналов.
Для увеличения дальности действия бесконтактной оптической мыши длительность зондирующих импульсов (t
Частота посылки зондирующих импульсов равна половине частоты обновления информации о действительных изображениях зондируемого пространства, т.е. зондирующие импульсы посылают во время первого Тк1, третьего Тк3 и т.д. кадров матриц 24, 25, 26 оптических приемников. Это позволит повысить помехоустойчивость работы устройства.
При определении азимутальной координаты геометрического центра области расположения контррефлекторов 14 и 15 на первой 24 и второй 25 матрицах оптических приемников в интервале от начала области расположения изображения контррефлекторов 14 и 15 до ее конца, при считывании тактов, тактовую частоту снижают в два раза, а после прохождения области расположения изображения контррефлекторов 14 и 15 посылку тактовых импульсов прекращают и состояние счетчика передают в компьютер 1.
При определении угломестной координаты геометрического центра области расположения контррефлекторов 14 и 15 на третей 26 и второй 25 матрицах оптических приемников в интервале от начала области расположения изображения контррефлекторов 14 и 15 до ее конца счет строк ведут через одну отроку, а после прохождения области расположения изображения контррефлекторов 14 и 15 посылку тактовых импульсов прекращают и состояние счетчика передают в компьютер 1.
Таким образом, из вышесказанного следует, что данное изобретение позволит обеспечить изменение интенсивности управляющего воздействия в зависимости от изменения пространственного положения бесконтактной оптической мыши, расширить функциональные возможности бесконтактной мыши путем использования всех шести ее степеней свободы, увеличить дальность действия бесконтактной мыши.
Изобретение относится к компьютерной технике, робототехнике, телевидению и может быть использовано при дистанционном вводе информации в телевизор, компьютер, тренажер или иной управляемый объект. Сущность изобретения: осуществляют оптическое зондирование области расположения бесконтактной оптической мыши с закрепленными на ней активным источником оптического излучения и одним и более контррефлекторами, получают разнесенные в пространстве линейное одномерное и плоское двумерное действительные оптические изображения зондируемого пространства с изображениями на них контррефлекторов, определяют текущие значения пространственных координат контррефлекторов, характер управляющих воздействий задают параметрами излучения активного источника оптического излучения, интенсивность воздействия определяют по векторной величине разности пространственных координат контррефлекторов в момент ввода параметра излучения и в текущий момент, параметры излучения активного источника оптического излучения и текущие значения пространственных координат контррефлекторов вводят в объект управления раздельно друг от друга. Устройство для реализации способа содержит стационарный блок с блоком приема и обработки управляющего сигнала и дистанционный пульт управления с блоком формирования управляющего сигнала, имеющим источник управляющего сигнала. 2 с. и 23 з.п. ф-лы, 6 ил.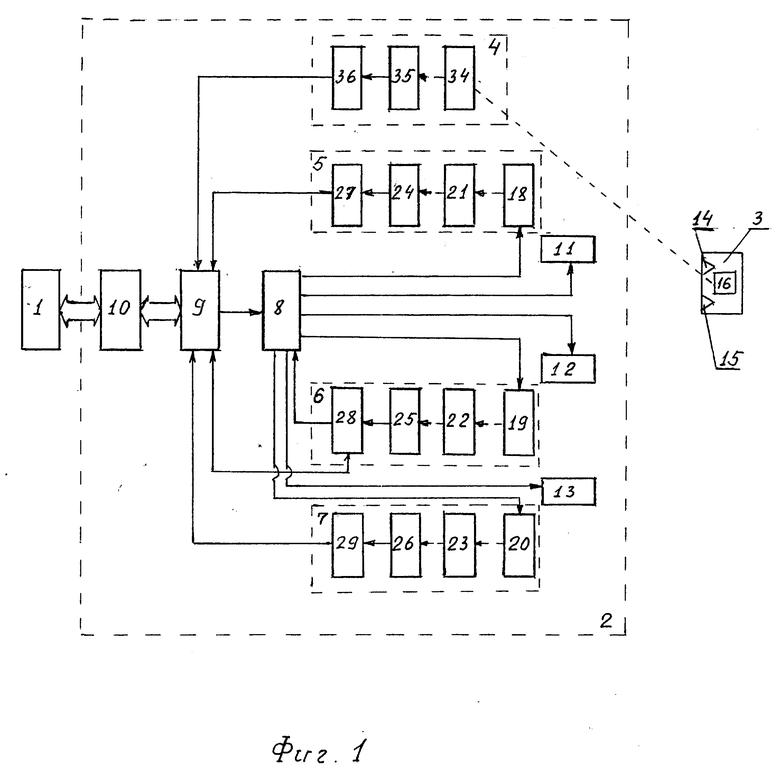
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фиргунов В.Э | |||
| ВМ РС для пользователя | |||
| - Санкт-Петербург: АО "Коруна", 1994 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЕР, патент, 0526015, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Седов С.А | |||
| Индивидуальные видеоредства | |||
| - Киев: Наукова думка, 1990. | |||
