Изобретение относится к автоматике, компьютерной техники, телевидению и может использоваться в робототехнике, телемеханике, объемных и стереоскопических телевизорах, интерактивных компьютерных играх для дистанционного ввода двухмерной или трехмерной информации в компьютер, робот, манипулятор, телевизор или иной управляемый объект.
Известен способ ввода информации в компьютер с помощью механической трехмерной "мыши", основанный на взаимно-однозначном соответствии вводимой информации как с двумерными координатами "мыши" (ее положением на плоскости), так и с положением особой кнопки, перемещаемой вертикально [1]. Однако наличие кабеля затрудняет работу оператора при вводе информации в управляемый объект. Кроме того, перемещение кнопки в вертикальном направлении ограничено высотой "мыши", что в свою очередь ограничивает точность ввода информации, определяемой вертикальной координатой.
Известно устройство ввода информации в компьютер, в котором связь между "мышью" и компьютером устанавливается с помощью инфракрасного излучения [2]. Данное устройство не использует проводные соединения, однако ввод информации, в том числе и перемещение курсора осуществляется исключительно нажатием кнопок, число которых должно быть достаточно большим. При этом перемещение курсора возможно не в произвольном направлении, а лишь по горизонтали и вертикали. Это усложняет работу с "мышью" и ограничивает возможности ее применения.
Наиболее близкими по технической сущности и достигаемому эффекту являются принимаемые нами за прототип способ ввода информации в объект управления и устройство для его реализации, основанные на вводе текущих значений пространственных координат свободно перемещаемой в пространстве "мыши", содержащей точечный источник акустического или оптического излучения, который возбуждает электрический сигнал в размещенных на компьютере и разнесенных в пространстве по крайней мере трех приемниках излучения [3]. При этом текущие значения пространственных координат "мыши" вычисляются на основе параллакса. Этот способ ввода информации не требует проводной связи и пульта управления с большим числом кнопок, однако, он уменьшает достоверность обнаружения сигнала от единичного излучателя на дальностях, близких к предельным, и достаточно сложен в реализации, поскольку требует трех разнесенных в пространстве приемников акустического или оптического излучения. При использовании акустического излучения дальность действия "мыши" мала, а при использовании оптического излучения приемники должны быть выполнены в виде многоэлементных линеек. Кроме того, для получения приемлемой точности определения координат "мыши" приемники излучения (акустического или оптического) должны быть максимально разнесены в пространстве (реально - на расстояния, сравнимые с размером монитора компьютера), что делает устройство достаточно громоздким. И, наконец, способ принципиально не допускает введения дополнительной (кроме значений трех координат) информации, что сужает функциональные возможности.
Целью изобретения является увеличение достоверности обнаружения сигнала от единичного излучателя на дальностях, близких к предельным, а также упрощение конструкции и уменьшение габаритов приемо-передающего устройства ввода информации в объект управления.
Другой целью изобретения является расширение функциональных возможностей способа ввода информации в объект управления.
Для осуществления предлагаемого способа дистанционного ввода информации в объект управления:
- изменяют пространственные координаты бесконтактной оптической "мыши" с закрепленными на ней источниками оптического излучения,
- определяют с использованием оптического сканирования пространственные координаты источников оптического излучения,
- вводят значения пространственных координат бесконтактной оптической "мыши" в качестве информации в объект управления.
В отличие от прототипа при осуществлении способа:
- источники оптического излучения закрепляют друг относительно друга на бесконтактной оптической "мыши" так, чтобы излучающая область образовывала плоскую геометрическую фигуру,
- формируют проекцию источников оптического излучения на фокальную плоскость приемной сканирующей системы,
- измеряют параметры полученной проекции,
- определяют по положению геометрического центра проекции плоской геометрической фигуры, образованной источниками оптического излучения, координаты бесконтактной оптической "мыши" в плоскости (X, Y), параллельной фокальной плоскости приемной сканирующей системы, и
- по параметрам проекции геометрической фигуры определяют Z - координату дальности бесконтактной оптической "мыши".
В отличие от прототипа определение координаты дальности геометрического центра бесконтактной оптической "мыши" производится не на основе вычисления величины параллакса одного источника излучения, а путем измерения параметров проекции плоской геометрической фигуры, образованной источниками излучения, на фокальную плоскость приемной сканирующей системы. В качестве параметров проекции могут быть использованы, например, площадь, периметр, координаты особых точек и т.д. Поскольку образ излучающей плоской геометрической фигуры известен, представляющий возможным на основе анализа изображения упомянутой излучающей плоской геометрической фигуры рассчитать как положение ее центра, так и расстояние между приемной сканирующей системой и бесконтактной оптической "мышью" известными методами [4].
Проще всего изобретение реализуется в том случае, когда источники оптического излучения закреплены на бесконтактной оптической "мыши" в виде плоской геометрической фигуры, имеющей круглую форму, например, в виде окружности, кольца или круга. В этом случае значения координаты дальности бесконтактной оптической "мыши" определяют по длине большей полуоси эллипса, образованного проекцией окружности, кольца или круга, на фокальную плоскость приемной сканирующей системы. Независимо от того, как ориентирована в пространстве бесконтактная оптическая "мышь", упомянутая большая полуось эллипса равна радиусу проекции образованного источниками излучения круга, кольца или окружности, при расположении этих плоских геометрических фигур параллельно фокальной плоскости приемной оптической системы. Тогда, зная фокусное расстояние объектива приемной оптической системы и радиус плоской геометрической фигуры, по величине проекции этого радиуса можно рассчитать расстояние между приемной сканирующей системой и бесконтактной оптической "мышью".
Длина большой полуоси эллипса может быть вычислена как максимальное расстояние между центром эллипса и точкой, лежащей на контуре эллипса.
При реализации способа ввода информации в объект управления для расширения функциональных возможностей устройства дистанционного ввода информации по величине малой полуоси эллипса определяют абсолютную величину угла поворота бесконтактной оптической "мыши" относительно плоскости (X, Y), проходящей через геометрический центр плоской геометрической фигуры круглой формы параллельно фокальной плоскости приемной сканирующей системы, и используют его значение для ввода дополнительной информации в компьютер.
Длина малой полуоси эллипса может быть вычислена как минимальное расстояние между центром эллипса и точкой, лежащей на контуре эллипса.
Способ реализуется с помощью устройства дистанционного ввода информации в объект управления, включающего стационарный приемопередающий блок и бесконтактную оптическую "мышь". Стационарный приемопередающий блок содержит стационарный источник оптического излучения, приемную сканирующую систему с объективом, микропроцессор, интерфейс, связи микропроцессора с объектом управления. Бесконтактная оптическая "мышь", содержит закрепленные на ней источники оптического излучения. Источники оптического излучения "мыши" и приемная сканирующая система имеют между собой оптическую связь.
В отличие от прототипа используется не один, а совокупность оптического излучения бесконтактной оптической "мыши", которые закреплены на ее основании, образуя плоскую геометрическую фигуру.
Источники оптического излучения бесконтактной оптической "мыши" могут быть закреплены на плоском основании, образуя окружность, кольцо или круг.
Источники оптического излучения могут быть как источниками собственного излучения, так и источниками отраженного излучения.
Плоская геометрическая фигура, образованная источниками излучения может быть выполнена в виде:
- катафота (набор контррефлекторов, например, уголковых отражателей),
- в виде матрицы светоизлучающих фотодиодов,
- в виде матрицы полупроводниковых лазеров.
Приемная сканирующая система может быть выполнена в виде оптико-механической сканирующей системы с приемником излучения.
Для уменьшения габаритов приемо-передающего блока приемная сканирующая система может быть выполнена:
- на основе передающей телевизионной трубки, чувствительной в инфракрасном диапазоне длин волн,
- в виде матрицы полупроводниковых приемников излучения,
- в виде матрицы полупроводниковых приемников излучения на основе приборов с зарядовой связью (ПЗС).
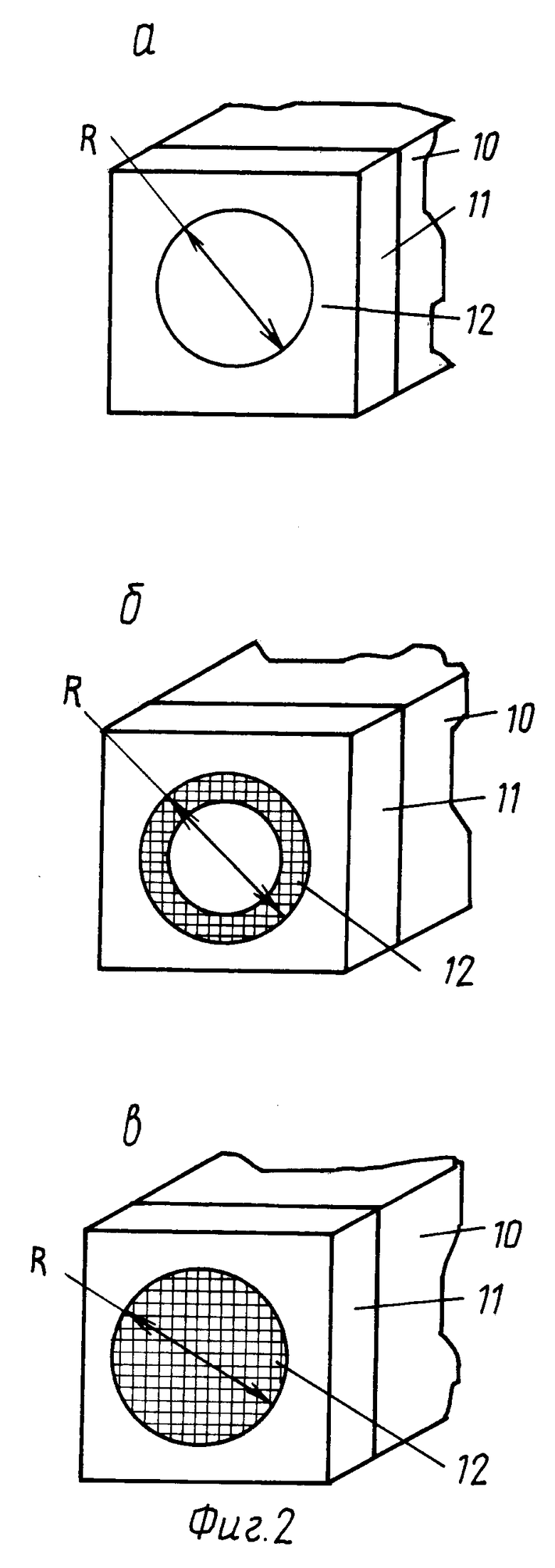
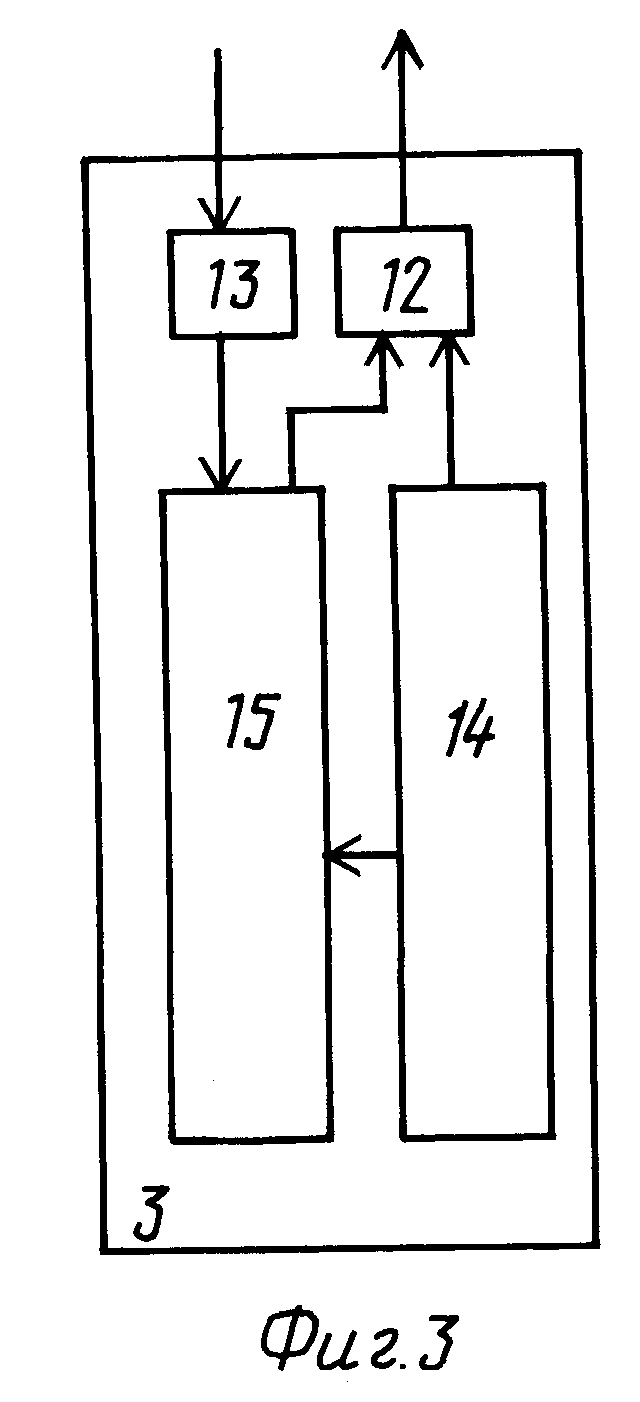
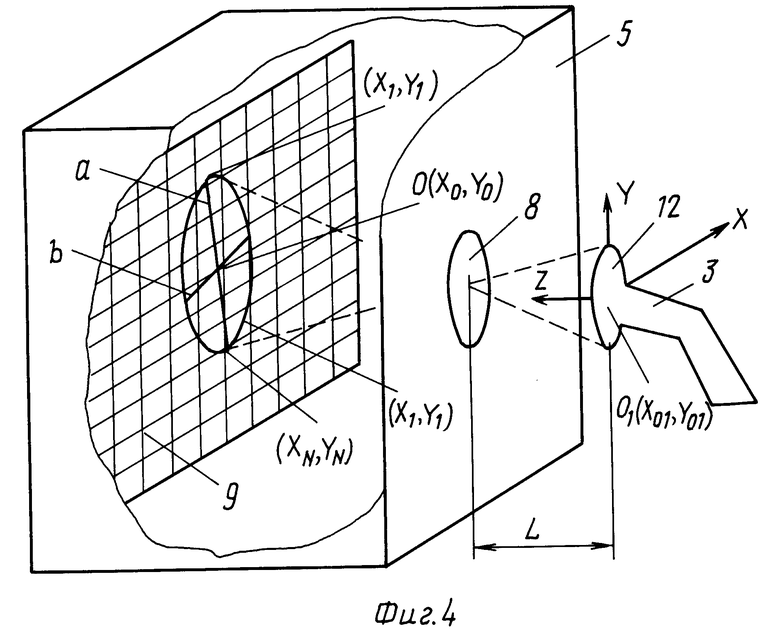
На фиг. 1 изображена блок-схема устройства, реализующего способ дистанционного ввода информации в объект управления (компьютер); на фиг. 2 - варианты расположения источников оптического излучения на бесконтактной оптической "мыши"; на фиг. 3 - блок-схема бесконтактной оптической "мыши" с активными источниками оптического излучения; на фиг. 4 - формирование проекции плоской геометрической фигуры, образуемой источниками оптического излучения "мыши", на фокальную плоскость приемной сканирующей системы.
Способ дистанционного ввода информации в объект управления может быть реализован с помощью устройства, блок схема которого представлена на фиг.1.
Устройство дистанционного ввода информации в объект управления, например, в компьютер 1 состоит из стационарного приемопередающего блока 2 и бесконтактной оптической "мыши" 3.
Стационарный приемопередающий блок 2 содержит стационарный источник оптического излучения 4, приемную сканирующую систему 5, микропроцессор 6 и интерфейс 7 связи с компьютером 1.
Приемная сканирующая система 5 содержит объектив 8 и стационарный приемник оптического излучения (с системой сканирования) 9.
Бесконтактная оптическая "мышь" 3 (фиг.2), содержит корпус 10, на плоской панели 11 которого закреплены источники оптического излучения 12. источники оптического излучения 12 образуют плоскую излучающую область, которая может иметь вид, например, окружности (фиг.2,а), кольца (фиг.2,б) или круга (фиг.2,в).
Источники оптического излучения 12 (фиг.3) могут быть источниками отраженного излучения и выполнены в виде контррефлекторов (пассивная "мышь") или источниками собственного излучения, выполненными в виде светоизлучающих диодов или полупроводниковых лазеров (активная "мышь").
На фиг. 3 представлена блок-схема активной бесконтактной оптической "мыши" 3, которая содержит источники оптического излучения 12, выполненные в виде матрицы светоизлучающих диодов, например, типа АЛ107Г, приемник типа ФД320 оптического (например, инфракрасного) излучения 13, блок питания 14, выполненный в виде стандартного миниатюрного аккумулятора или батарейки, и генератор импульсов 15. Выход приемника оптического излучения 13 электрически соединен с входом генератора импульсов 15, выход которого, в свою очередь, электрически соединен с входом источников оптического излучения 12. Генератор импульсов 15 и источники оптического излучения 12 подключены к источнику питания 14.
Источники оптического излучения 12 и вход приемной сканирующей системы 5 9фиг. 1) имеют собой оптическую связь, выход приемной сканирующей системы 5 электрически соединен с входом микропроцессора 6, выход микропроцессора 6 электрически соединен с входом интерфейса 7, а выход интерфейса 7 электрически соединен с входом компьютера 1.
Стационарный приемопередающий блок 2 подключен к внешнему источнику питания (не показан). Стационарный источник оптического излучения 4 может быть выполнен на основе светоизлучающего диода, например, светодиода АЛ107Г, излучающего в инфракрасной области спектра.
Приемная сканирующая система 5 с объективом 8 и стационарным приемником оптического излучения 9 могут быть выполнены в виде единого блока на основе матрицы приемников излучения на ПЗС, например, марки А-1157 с числом элементов по горизонтали и вертикали соответственно 500 и 582 и размерами элемента 17 x 11 мкм.
При реализации способа ввода информации в объект управления, например, в компьютер:
- источники оптического излучения 12 закрепляют на бесконтактной оптической "мыши" 3 в виде окружности (фиг.2,а), кольца (фиг.2,б) или круга (фиг.2,в),
- изменяют пространственные координаты бесконтактной оптической "мыши" 3 с закрепленными на ней источниками оптического излучения 12,
- определяют с использованием оптического сканирования пространственные координаты источников оптического излучения 12 и геометрического центра O1(X01, Y01) излучающей области бесконтактной оптической "мыши" 3 (фиг.4).
В момент определения пространственных координат источников оптического излучения 12 пассивной бесконтактной "мыши" 3 (определение координат может производиться как непрерывно, так и в заданные моменты времени) стационарный источник оптического излучения 4 (фиг.1) излучает инфракрасное излучение в направлении бесконтактной оптической "мыши" 3. Излучение отражается от выполненных в виде контррефлекторов пассивных источников оптического излучения 12 в сторону приемной сканирующей системы 5, и сформированное объективом 8 изображение источников оптического излучения 12 проецируется на выполненный в виде чувствительной к инфракрасному излучению матрицы ПЗС стационарный приемник оптического излучения 9 (фиг.1).
При определении пространственных координат источников оптического излучения 12 активной бесконтактной оптической "мыши" 3 стационарный источник оптического излучения 4 испускает инфракрасное излучение в направлении бесконтактной оптической "мыши" 3. Это излучение принимается приемником оптического излучения 13 (фиг.3), сигнал которого через генератор импульсов 15 включает активные источники оптического излучения 12 "мыши" 3. Излучение от источников оптического излучения 12 "мыши" 3, сфокусированное объективом 8 приемной сканирующей системы 5, проецируется на матрицу ПЗС (фиг. 4), и далее работа устройства осуществляется аналогично работе устройства с пассивными источниками оптического излучения 12.
В стационарном приемнике оптического излучения 9 (на матрице ПЗС) формируется проекция плоской геометрической фигуры, образованной источниками оптического излучения 12, например, катафота, на фокальную плоскость приемной сканирующей системы 5 (фиг. 4).
Сигналы со стационарного приемника оптического излучения 9 (матрицы ПЗС) подаются на микропроцессор 6, выполненный, например, на основе микросхемы "Motorolla DSP56002, который измеряет параметры полученной проекции, а именно:
- по координатам первого (X1, Y1) и последнего (XN, YN) из освещенных элементов ПЗС-матрицы (номерам их строк и столбцов) рассчитывает координаты геометрического центра изображения катафота O(Xo, Yo) на основе формул Xo = (X1 + XN)/2, Yo = (Y1 + YN)/2;
- определяет в каждой i-й строке ПЗС-матрицы координаты (Xi, Yi) первого освещенного элемента и рассчитывает квадрат расстояния R
- определяет максимальное R
- используя найденную таким образом длину большой полуоси a, известные значения фокусного расстояния объектива F и радиуса катафота R по формуле
L = (F • R)/a
рассчитывает расстояние от приемной сканирующей системы до бесконтактной оптической "мыши" L;
- по величине малой полуоси эллипса b определяет абсолютную величину угла поворота бесконтактной оптической "мыши" 3 относительно плоскости (X, Y), проходящей через геометрический центр O1 геометрической фигуры круглой формы, параллельно фокальной плоскости приемной сканирующей системы 5.
- через интерфейс 7 вводит значения пространственного положения бесконтактной оптической "мыши" 3 в качестве информации в компьютер 1, при этом в зависимости от величины малой полуоси b или изменения этой величины осуществляется дополнительное воздействие на управляемый объект (например, осуществляется поворот выделенного фрагмента изображения вокруг заданной оси на угол, пропорциональный b).
Возможен и иной подход к определению длин большой a и малой b полуосей эллипса. В этом случае микропроцессор 6 выполняет следующие операции:
- подсчитывает число элементов матрицы ПЗС, освещенность которых (a значит и снимаемый с них электрический сигнал) выше заданной пороговой величины и таким образом по известной площади элемента матрицы находит площадь S изображения круга;
- дифференцирует сигнал и подсчитывает число элементов матрицы ПЗС, для которых величина модуля приращения сигнала превышает заданную пороговую величину, т.е. число элементов, находящихся на границе освещенной и неосвещенной областей, и таким образом по известному характерному размеру элемента матрицы вычисляет периметр C изображения круга 11;
- по известным величинам S, C и известным формулам вычисляет длины большой a и малой b полуосей эллипса.
Поскольку периметр эллипса выражается через эллиптический интеграл E(ε) , где ε = (a2-b2)/a2 - эксцентриситет, его расчет требует значительных затрат машинного времени. Поэтому целесообразно использовать интерполяцию зависимости E(ε). .
Ошибку определения горизонтальной X-координаты Δx можно оценить следующим образом. При горизонтальном угле зрения ϕ = 70o горизонтальное поле зрения на расстоянии L = 3000 мм составляет A = 2•L•tg(ϕ/2) = 4200 мм. . Это поле зрения проецируется на матрицу приемников ПЗС, полностью перекрывая ее. Поскольку матрица имеет 582 элемента по горизонтали, горизонтальное поле зрения делится также на 582 дискретные области, в пределах каждой из которых положение элемента излучающей панели неразличимо. Горизонтальный размер каждой из таких областей Δx = 4200 мм/582 ≅ 7 мм , что и определяет ошибку определения горизонтальной X-координаты. Ошибка определения вертикальной Y-координаты будет того же порядка.
Ошибку определения расстояния L от приемной сканирующей системы 5 до бесконтактной оптической "мыши" 3 при вводе информации в управляемый объект можно оценить по формуле (1), дифференцируя которую, получаем:
ΔL = (L2/RF)•Δa (2)
где
ΔL - ошибка определения расстояния L, а Δa - ошибка измерения длины большой полуоси эллипса, равная размеру элемента матрицы ПЗС. При R = 50 мм и тех же значениях Δa , F и L имеем ΔL ≅ 55 мм , что хотя и больше, чем Δx , но составляет вполне приемлемую величину для большинства практических применений.
Таким образом, из вышесказанного следует, что данное изобретение позволит увеличить достоверность обнаружения сигнала от единичного излучателя на дальностях, близких к предельным, а также уменьшить габариты, упростить конструкцию устройства дистанционного ввода информации в объект управления путем использования одного приемного сканирующего устройства и расширить его функциональные возможности за счет использования дополнительных каналов ввода информации.
Следует иметь в виде, что форма выполнения изобретения, описанная выше и показанная на чертежах, представляет собой только возможный предпочтительный вариант его осуществления. Могут быть использованы различные вариации выполнения изобретения в отношении исполнения отдельных его узлов и последовательности проведения
Источники информации
1. ЕП N 0403782, кл. G 06 K 11/18, G 06 F 3/033, G 06 K 11/06, опублик. 27.12.90.
2. Заявка PCT N WO 89/05496, кл. G 06 K 11/06, F 06 F 3/033, G 06 F 3/02, опублик. 15.06.1989.
3. ЕП N 526015 кл. G 06 K 11/18, опублик. 03.02.93.
4. Катыс Г.П. Восприятие и анализ оптической информации автоматической системой. - М.: Машиностроение, 1986.
Изобретение относится к автоматике, компьютерной технке, телевидению и может использоваться в работотехнике, телемеханике, объемных и стереоскопических телевизорах, интерактивных компьютерных играх для дистанционного ввода, двумерной или трехмерной информации в компьютер, робот, манипулятор, телевизор или иной управляемый объект. Изобретение позволяет увеличить достоверность обнаружения сигнала от единичного излучателя на дальностях, близких к предельным, а также упростить конструкцию и уменьшить габариты приемо-передающего устройства ввода информации в объект управления. При осуществлении предложенного способа дистанционного ввода информации в объект управления изменяют пространственные кординаты бесконтактной оптической "мыши" с закрепленными на ней источниками оптического излучения, определяют с использованием оптического сканирования пространственные координаты источников оптического излучения, вводят значения пространственных координат бесконтактной оптической "мыши" в качестве информации в объекте управления. Устройство, реализующее предложенный способ, включает стационарный приемопередающий блок 2 и бесконтактную свободно перемещаемую в пространстве оптическую "мышь" 3. Стационарный приемопередающий блок содержит стационарный источник 4 оптического излучения, приемную сканирующую систему 5, микропроцессор 6, интерфейс 7 для связи микропроцессора с объектом управления. 2 с. и 9 з.п.ф-лы, 4 ил.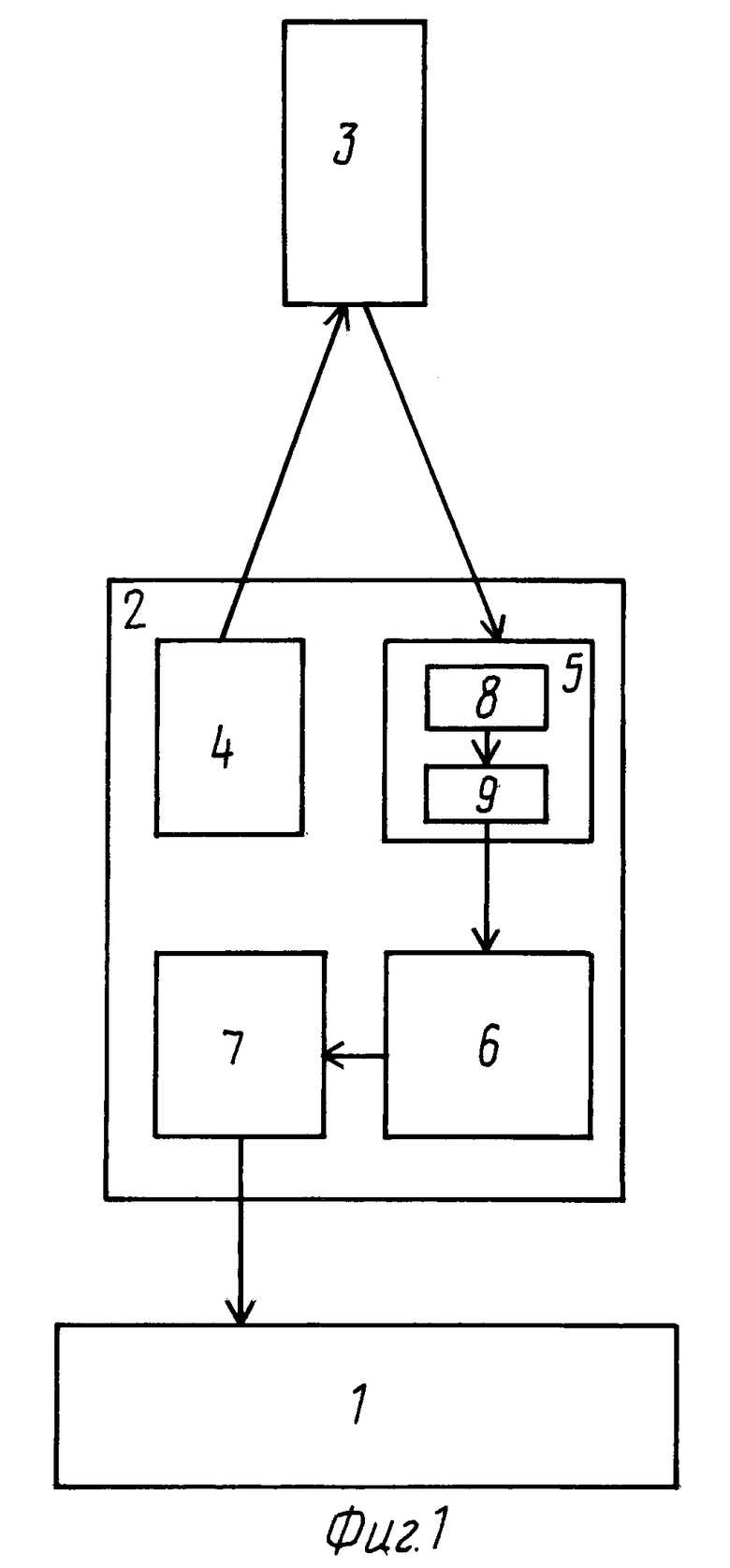
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЕР, патент, 0403782, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| WO, заявка, 89/05496, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ЕР, патент, 526015, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
