Изобретение относится к приборам систем инерционного управления подвижными объектами и может быть использовано для решения задач навигации и ориентации этих объектов.
Известны трехкомпонентные дифференциальные струнные акселерометры, содержащие 6 струн, расположенных попарно в трех взаимно перпендикулярных направлениях, соединенных одними концами с корпусом, другими с общей инерционной массой [1]
Недостатком таких акселерометров является невысокая точность, увеличенные вес и габариты.
Известен струнный акселерометр, содержащий инерционную массу, подвешенную в корпусе на четырех струнах, и блоки возбуждения каждой струны, точки крепления струн в корпусе расположены в вершинах правильного тетраэдра, центром которого является центр тяжести инерционной массы [2]
В этом струнном акселерометре ускорение пропорционально корню квадратному из суммы девиаций частот струн, поэтому он обладает низкой точностью.
Кроме того, в известном акселерометре вследствие соединения струн с общей инерционной массой между струнами имеется сильная механическая связь, что затрудняет борьбу с захватом частот, также являющимся одним из источников ошибок.
Техническим результатом изобретения является повышение точности струнного акселерометра при малых габаритах.
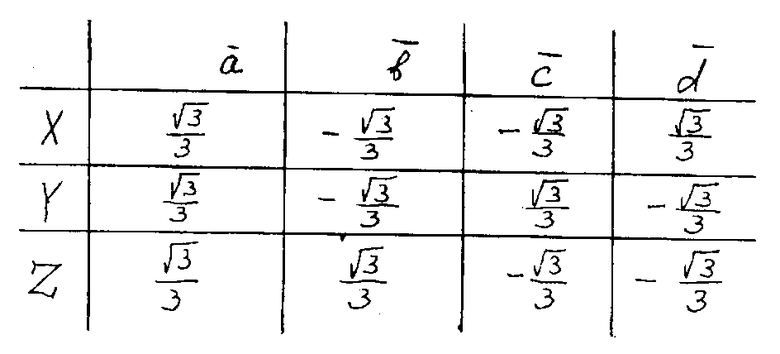
Для достижения указанного результата в трехкомпонентном струнном акселерометре, содержащем четыре струны и блоки возбуждения колебаний струн, каждая из струн включена в состав однокомпонентного акселерометрического чувствительного элемента, содержащего струну и связанную с ней инерционную, массу, причем измерительные оси этих чувствительных элементов, определенные как векторы  , направленные вдоль струн в сторону инерционных масс, составляют с измерительными осями трехкомпонентного акселерометра, определенными прямоугольной декартовой системой координат X, Y, Z, задаваемой базовыми элементами акселерометра, углы, определяемые таблицей направляющих косинусов (см. в конце описания).
, направленные вдоль струн в сторону инерционных масс, составляют с измерительными осями трехкомпонентного акселерометра, определенными прямоугольной декартовой системой координат X, Y, Z, задаваемой базовыми элементами акселерометра, углы, определяемые таблицей направляющих косинусов (см. в конце описания).
На чертеже изображен общий вид трехкомпонентного дифференциального струнного акселерометра.
Акселерометр содержит корпус 1, в котором установлены четыре чувствительных элемента 2, каждый из которых включает в себя струну 3, инерционную массу 4 и блок возбуждения колебаний 5.
Измерительные оси чувствительных элементов 2 (оси струн) расположены по отношению к измерительным осям акселерометра X, Y, Z под углами, определяемыми таблицей.
Свяжем с базовыми установочными элементами акселерометра правую трехосную декартовую систему координат X, Y, Z. Предлагаемый трехкомпонентный акселерометр измеряет компоненты ускорения вдоль осей X, Y, Z. Измерительные оси чувствительных элементов расположим по направлению ортов  заданных в указанной декартовой системе координат направляющими косинусами:
заданных в указанной декартовой системе координат направляющими косинусами:
Скалярные произведения векторов  равны
равны  т.е. углы между ортами составляют
т.е. углы между ортами составляют  109o28 16,3''.
109o28 16,3''.
Каждый орт составляет с осями октанта прямоугольной системы координат, в котором он расположен, равные углы  54o44 8,2''.
54o44 8,2''.
Пусть в декартовой системе координат X, Y, Z задан вектор ускорения W, компоненты которого в измерительных осях акселерометра Wx, Wy, Wz. Проекции ускорения на измерительные оси чувствительных элементов составят: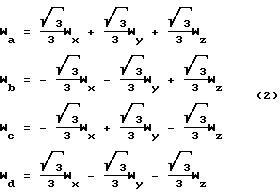
В свою очередь компоненты ускорения вдоль измерительных осей акселерометра будут: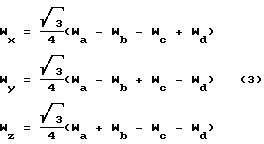
при этом Wa + Wb + Wc + Wd 0.
Для струнного чувствительного элемента справедливо соотношение:
fi foi + K•W, (4)
где
fi частота колебаний струны;
foi частота колебаний струны в отсутствие ускорения;
K коэффициент преобразования;
W проекция ускорения.
С учетом (4) выражения (3) могут быть переписаны в виде: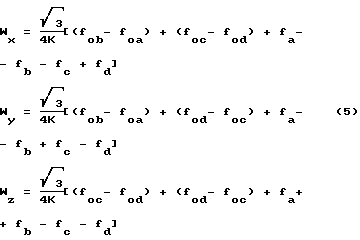
Разности частот колебаний струн в прямоугольных скобках являются дифференциальными частотами выходами трехкомпонентного акселерометра, измеряющего ускорение в проекциях на оси прямоугольной декартовой системы координат, связанной с его корпусом. Из выражения (5) видно, что в предлагаемой схеме акселерометра имеет место компенсации смещения нулевых частот колебаний струн, т.е. снижается погрешность смещения нуля.
Если в таком акселерометре температурные коэффициенты частот колебаний струн чувствительных элементов равны, то выходная информация дифференциального акселерометра не будет зависеть от температуры. Так как чувствительные элементы устанавливаются в прибор независимо, можно при изготовлении осуществить их подбор, обеспечивающий выполнение указанного условия.
Таким же образом будут компенсироваться и другие погрешности, оказывающие одинаковое влияние на чувствительные элементы.
Акселерометр работает следующим образом. При наличии ускорения его проекции вдоль измерительных осей чувствительных элементов изменяют частоты колебаний соответствующих струн. Разности частот колебаний частот струн в соответствии с выражением (5) являются мерой проекции ускорения на оси декартовой системы координат. Обычно в направлении этих осей и требуется знание ускорения в инерциальной системе управления.
В предлагаемом трехкомпонентном дифференциальном струнном акселерометре благодаря использованию отдельных струнных чувствительных элементов расширяются возможности компоновки прибора. Например, при создании трехкомпонентного акселерометра для задач инклинометрии буровых скважин требуется, чтобы один из линейных габаритных размеров был минимальным с целью обеспечения возможности размещения акселерометра в буровой трубе.
В этом случае чувствительные элементы располагаются один над другим вдоль одной из измерительных осей акселерометра (совпадающих с осью скважины) при сохранении их ориентации относительно баз самого акселерометра, как указано выше. В известной схеме акселерометра со струнами, связанными центральной общей массой, такая компоновка невозможна.
Использование изобретения позволит создать малогабаритный недорогой трехкомпонентный струнный акселерометр высокой точности для применения в различных областях техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1986 |
|
SU1840348A1 |
| АКСЕЛЕРОМЕТР | 1988 |
|
RU2046347C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ СКОРОСТЕЙ И УСКОРЕНИЙ | 1969 |
|
SU1840379A1 |
| АКСЕЛЕРОМЕТР | 1989 |
|
RU2046348C1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 1981 |
|
SU1840364A1 |
| АКСЕЛЕРОМЕТР | 1986 |
|
RU2085954C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2018852C1 |
| Трехкомпонентный пьезоэлектрический акселерометр | 1990 |
|
SU1760462A1 |
| БЕСКАРДАННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА УГЛОВОЙ ОРИЕНТАЦИИ | 1977 |
|
SU1839897A1 |
Использование: в системах инерциального управления подвижными объектами для решения задач навигации и ориентации объектов. Сущность: в корпусе установлены четыре чувствительных элемента, каждый из которых состоит из струны, связанной с инерционной массой, блоки возбуждения колебаний струн. Оси струн расположены под определенными углами по отношению к измерительным осям акселерометра. 1 табл., 1 ил.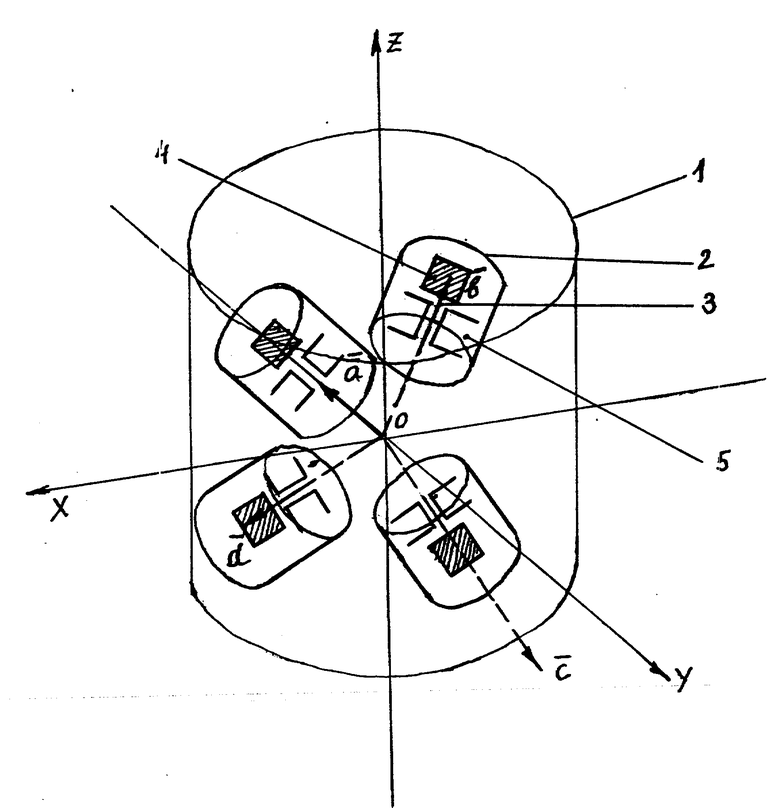
Трехкомпонентный дифференциальный струнный акселерометр с взаимно ортогональными измерительными осями, содержащий базовые установочные элементы, инерционную массу, четыре струны и блоки возбуждения колебаний струн, отличающийся тем, что дополнительно введены три инерционные массы, каждая из струн связана с одной инерционной массой и образует с ней однокомпонентный акселерометрический чувствительный элемент, причем измерительные оси этих чувствительных элементов, определенные как векторы 
 направленные вдоль струн в сторону инерционных масс, составляют с измерительными осями трехкомпонентного акселерометра, определенными прямоугольной декартовой системой координат X, Y, Z, задаваемой базовыми установочными элементами, углы в соответствии с таблицей направляющих косинусов.
направленные вдоль струн в сторону инерционных масс, составляют с измерительными осями трехкомпонентного акселерометра, определенными прямоугольной декартовой системой координат X, Y, Z, задаваемой базовыми установочными элементами, углы в соответствии с таблицей направляющих косинусов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент N 1011775, G 01 P 15/10, 1965 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство N 474740, G 01 P 15/10, 1975. | |||
