Настоящее изобретение относится к области инерциальной навигации и может быть использовано при определении угловой ориентации движущихся объектов.
Известны бескардановые инерциальные системы угловой ориентации, состоящие из трех измерителей угловой скорости, оси чувствительности которых образуют ортогональный трехгранник, неподвижный относительно осей объекта, и бортовой вычислительной машины, в которой по информации от измерителей угловой скорости математически моделируется угловая ориентация движущегося объекта (см. книгу М.И.Захарина, Ф.Н.Захарина "Кинематика инерциальных систем навигации" стр.173, Машиностроение, 1968 г.).
Наличие собственных уходов измерителей угловой скорости (ИУС) приводит к накапливающейся со временем погрешности определения угловой ориентации объекта указанными бескардановыми инерциальными системами.
Целью настоящего изобретения является повышение точности определения ориентации объекта бескардановой инерциальной системой.
Поставленная цель достигается тем, что в состав бескардановой инерциальной системы введены три дополнительных измерителя угловой скорости, оси чувствительности которых параллельны соответствующим осям чувствительности основных измерителей угловой скорости, а выходы соединены с дополнительными входами бортовой вычислительной машины, и блок реверса кинетических моментов, вход которого соединен с управляющим выходом бортовой вычислительной машины, а три выхода подключены к входам питания гиромоторов дополнительных измерителей угловой скорости.
На чертеже представлена блок-схема бескардановой инерциальной системы.
Бескардановая инерциальная система содержит три основных измерителя угловой скорости 1, 2, 3, три дополнительных 4, 5, 6, блок реверса кинетических моментов 7 и бортовую вычислительную машину 8.
Функционирование бескардановой инерциальной системы приводится на примере определения ориентации объекта в условиях, когда систематические составляющие скоростей уходов ИУС не меняются со временем. Пусть ω1, ω2, ω3 - проекции абсолютной угловой скорости объекта на оси, совпадающие с осями чувствительности измерителей угловой скорости 1, 2, 3 соответственно. Пусть τ1, τ2,...τ6 - систематические значения скорости уходов, а d1(t), d2(t),...d6(t) - значения выходных сигналов в момент времени t измерителей угловой скорости 1, 2,...6 соответственно. Величины di(t) (i=1,...6) представляют собой суммы полезного сигнала об измеряемой угловой скорости и скорость ухода i-ого измерения. Ориентация объекта определяется в бортовой вычислительной машине 8 по информации, поступающей от ИУС 1, 2 и 3. На момент времени t1, бортовая вычислительная машина определяет и запоминает разности (A(t1), B(t1), C(t1)) выходных сигналов измерителей угловой скорости, оси чувствительности которых параллельны
A(t1)=d1(t1)-d4(t1)=ω1(t1)+τ1-ω1(t1)-τ4=τ1-τ4
B(t1)=d2(t1)-d5(t1)=ω2(t1)+τ2-ω2(t1)-τ5=τ2-τ5
C(t1)=d3(t1)-d6(t1)=ω3(t1)+τ3-ω3(t1)-τ6=τ3-τ6
По сигналу бортовой вычислительной машины блок реверса 7 осуществляет реверс кинетических моментов измерителей угловой скорости 4, 5, 6, в результате чего скорости уходов этих измерителей поменяют знак.
После реверсирования кинетических моментов, на момент времени t2 бортовая вычислительная машина повторно определяет разности
A(t2)=d1(t2)-d4(t2)=ω1(t2)+τ1-ω1(t2)+τ4=τ1+τ4
B(t2)=d2(t2)-d5(t2)=ω2(t2)+τ2-ω2(t2)+τ5=τ2+τ5
C(t2)=d3(t2)-d6(t2)=ω3(t2)+τ3-ω3(t2)+τ6=τ3+τ6
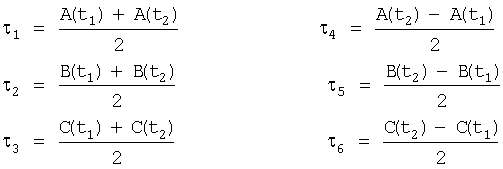
По величинам A(t1), B(t1), C(t1), A(t2), B(t2), C(t2) бортовая вычислительная машина определяет значения систематических составляющих уходов измерителей угловой скорости (1÷6)
Таким образом, предлагаемое устройство позволяет с точностью до случайных составляющих скоростей уходов определить и на основании этого исключить влияние систематических составляющих уходов измерителей угловой скорости на точность определения ориентации объекта бескардановой инерциальной системой.
Следует отметить, что выявление систематических составляющих уходов измерителей угловой скорости происходит в режиме определения бескардановой инерциальной системой угловой ориентации объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКАРДАНОВАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА УГЛОВОЙ ОРИЕНТАЦИИ | 1976 |
|
SU1840256A1 |
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ПРИ ОТЖИМЕ В СТИРАЛЬНЫХ МАШИНАХ БАРАБАННОГО ТИПА | 2011 |
|
RU2455407C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОДНОКРАТНЫХ СВЕРХКОРОТКИХ ИМПУЛЬСОВ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2079941C1 |
| Чувствительный элемент гироскопа | 2021 |
|
RU2777296C1 |
| СПОСОБ ПРЕОДОЛЕНИЯ РЕЗОНАНСА В СТИРАЛЬНОЙ МАШИНЕ БАРАБАННОГО ТИПА | 2008 |
|
RU2367735C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ | 2023 |
|
RU2809744C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2350998C2 |
Изобретение относится к области инерциальной навигации и может быть использовано при определении угловой ориентации движущихся объектов. Сущность: система содержит три измерителя угловой скорости со взаимно ортогональными осями и вычислительное устройство, связанное с измерителями угловой скорости. Кроме того, система содержит три дополнительных измерителя угловой скорости и блок реверса кинематических моментов. Причем оси чувствительности дополнительных измерителей угловой скорости совпадают с осями чувствительности основных измерителей угловой скорости. Выходы указанных дополнительных измерителей соединены с вычислительным устройством. При этом вход блока реверса кинематических моментов связан с вычислительным устройством, а выход - с дополнительными измерителями угловых скоростей по цепям питания их гиромоторов. Технический результат: повышение точности. 1 ил.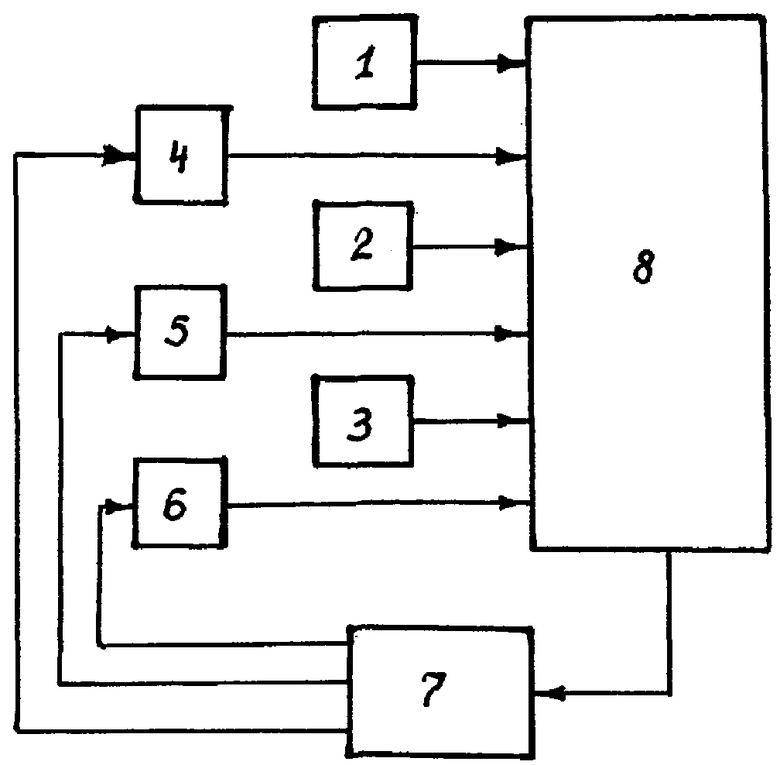
Бескарданная инерциальная система угловой ориентации, содержащая три измерителя угловой скорости со взаимно ортогональными осями чувствительности и вычислительное устройство, связанное с измерителями угловой скорости, отличающаяся тем, что, с целью повышения точности, в нее введены три дополнительных измерителя угловой скорости, оси чувствительности которых совпадают с осями чувствительности основных измерителей угловой скорости, а выходы соединены с вычислительным устройством, и блок реверса кинетических моментов, вход которого связан с вычислительным устройством, а выход - с дополнительными измерителями угловых скоростей по цепям питания их гиромоторов.
| М.И.Захарин и др | |||
| "Кинематика инерциальных систем навигации", Машиностроение, 1968, стр.173 | |||
| С.М.Зельдович и др | |||
| "Автокомпенсация инструментальных погрешностей гиросистем", Судостроение, 1976, стр.146-177. |

