Настоящее изобретение относится к способу и устройству для определения относительного положения и естественной относительной траектории двух сближающихся космических аппаратов, а именно первого и второго сближающихся космических аппаратов.
Под "естественной относительной траекторией" подразумевается, что в процессе определения положения и траектории согласно изобретению, ни второй сближающийся космический аппарат, ни первый сближающийся космический аппарат не подвергаются произвольному маневрированию и свободно движутся по своим соответствующим орбитам. Кроме того, настоящее изобретение касается как случая, когда второй сближающийся космический аппарат преследует первый сближающийся космический аппарат, так и случая, когда второй сближающийся космический аппарат оказывается перед первым сближающимся космическим аппаратом и тормозится, чтобы этот последний соединился с ним.
Известно, что именно для встречи на орбите первого сближающегося космического аппарата важно знать текущие относительное положение и естественную относительную траекторию обоих космических аппаратов. До сих пор для достижения этой цели применяются различные способы.
Существует например, возможность погрузить на борт космического аппарата радар. Однако, масса, стоимость и потребляемая радаром электроэнергия весьма значительны, что создает непреодолимые ограничения для некоторых космических аппаратов.
Кроме того, можно использовать систему спутников позиционирования GPS (Global Positioning System).
Однако целесообразность применения данного метода спорно из-за незнания эксплуатационных характеристик и надежности системы GPS. Точнее метод GPS требует специального оборудования размещаемого на каждый из космического аппаратов.
Можно также выполнять визирование с земли радаром или теодолитами и расчетным путем определять орбиты для определения скорости и искомой траектории.
Однако это приводит к большой зависимости от инфраструктур земли и большой неточности для относительных расстояний менее 20 км.
Известен способ определения расстояния между истребителем и мишенью (Patent abstracts of Japan, vol.14, по 101 (P-1012) (4044) 23.02.1990, патент Японии JP-A-1305312). А в патенте Японии 13053/2 определяют, с одной стороны расстояние между истребителем и мишенью и, с другой стороны, азимут, исходя из изображения мишени, прижимаемого камерой, расположенной на истребителе и с помощью схемы обработки изображения.
Решение по патенту Японии не позволяет точно определять координаты положения объекта в системе отсчета и практически ограничивается определением расстояния между истребителем и мишенью.
Кроме того, полученные результаты относятся к моменту регистрации изображения. Решение по патенту Японии не позволяет производить экстраполяцию для получения результатов в некоторый момент t времени.
Наиболее близким настоящему изобретению является способ и устройство измерения расстояния между подлежащим измерению объектом и подвижным относительно указанного объекта измерительным устройством. (Патент Германии DE4019214, Gsaefe, Volker). Указанное решение позволяет определить расстояние между объектом и измерительным устройством, снабженным камерой, которое перемещается по отношению к указанному объекту, исходя из изменений изображения двух точек объекта, предположительно находящихся на одинаковом расстоянии от камеры. Осуществляют несколько последовательных измерений изображения с целью экстраполяции в некоторый момент времени t, размера указанного изображения и его временного изменения. Расстояние получают таким образом исходя из размеров изображения, его временного изменения, а также относительной скорости устройства по отношению к объекту в направлении оптической оси камеры. Однако без знания указанной относительной скорости, определяемой внешними средствами данный способ не может быть реализован.
Таким образом указанное решение позволяет лишь как уже было отмечено определять расстояние между объектом и измерительным устройством.
В основу настоящего изобретения положена задача создания свободной от вышеуказанных недостатков системы, отличающейся простотой, надежностью, точностью, независимостью от почвы, возможностью легко размещаться на борту космического аппарата с небольшой массой и с малым потреблением электроэнергии.
Поставленная задача решается тем, что в способе для определения относительного положения и естественной относительной траектории второго сближающегося космического аппарата, по отношению к первому сближающемуся космическому аппарату, причем указанные космические аппараты находятся на участках их соответствующих орбит, где их векторы скорости, по меньшей мере, приблизительно параллельны, а указанный второй сближающийся космический аппарат стабилизирован по трем осям его орбиты, заключающемся в том, что наблюдают с указанного второго сближающегося космического аппарата, указанный первый сближающийся космический аппарат, причем расстояние между указанными космическими аппаратами определяют с учетом реальных размеров указанного первого сближающегося космического аппарата и его видимого со второго сближающегося космического аппарата размера, согласно изобретению наблюдение производят в плоскости (oy, oz), связанной с указанным вторым сближающимся космическим аппаратом, ортогональной к оси средства наблюдения и проходящей через точку отсчета (о) указанного второго сближающегося космического аппарата,
- измеряют в каждый из двух последовательных моментов времени t1 и t2 в указанной плоскости и относительно указанной точки отсчета (о) указанного второго сближающегося космического аппарата, видимое положение указанного первого сближающегося космического аппарата;
- измеряют в каждый из моментов времени t1 и t2, в указанной плоскости, видимый размер указанного первого сближающегося космического аппарата,
- вычисляют в каждый из моментов времени t1 и t2 с помощью указанных измерений видимых положения и размеров, а также реального размера указанного первого сближающегося космического аппарата, положение указанной точки отсчета (о) указанного второго сближающегося космического аппарата, в системе отсчета (OX, OY, OZ), связанной с указанным первым сближающимся космическим аппаратом,
- вычисляют в указанной системе отсчета (OX, OY, OZ), связанной с указанным первым сближающимся космическим аппаратом и в момент времени t1, составляющие относительной скорости указанного второго сближающегося космического аппарата относительно первого сближающегося космического аппарата с учетом двух положений указанной точки отсчета (о), рассчитанных в момент времени t1 и t2, а также с учетом известных характеристик положения указанного первого сближающегося космического аппарата на его орбите,
- вычисляют в указанной системе отсчета, привязанной к указанному первому сближающемуся космическому аппарату, координаты положения указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом в любой момент времени t с учетом положения указанной точки отсчета, вычисленной в момент t1 и с учетом указанных составляющих относительной скорости, также рассчитанных в момент времени t1.
Таким образом, благодаря измерению видимой величины первого сближающегося космического аппарата, учитывают расстояние разделяющее указанные космические аппараты, в то время как определение видимого положения первого сближающегося космического аппарата по отношению ко второму сближающемуся космическому аппарату, в вертикальной и горизонтальной плоскостях позволяет точно определить место первого сближающегося космического аппарата.
В частности, когда первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L, например, из-за того, что он содержит панели солнечных элементов развернутые ортогонально в орбитальной плоскости, целесообразно в каждый из указанных моментов t1 и t2 измерять соответственно значения s1 или s2 места начала указанной системы отсчета, связанной с указанным приблизившимся космическим аппаратом, относительно указанной точки отсчета (о), связанной с указанным вторым сближающимся космическим аппаратом, в каждый из моментов времени t1 и t2,
- измерять в каждый из моментов времени t1 и t2, соответственно, значения ag1, ad1 или ag2, ad2 азимутов левой и правой концевых частей первого сближающегося космического аппарата относительно указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом,
- вычислять в моменты t1 и t2 с учетом размаха L и измерений места и азимута s1, ag1, ad1 и s2, ag2, ad2 соответственно, соответствующие координаты положения X1, Y1, Z1 и X2, Y2, Z2, указанной точки отсчета, связанной со вторым сближающимся космическим аппаратом, в указанной системе отсчета, связанной с первым сближающимся космическим аппаратом,
- вычислять в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом в момент времени t1, составляющие Xp1, Yp1 и Zp1 относительной скорости второго сближающегося космического аппарата относительно первого сближающегося космического аппарата с учетом координат положения X1, Y1, Z1 и X2, Y2, Z2 вычисленных в моменты t1 и t2, а также известных характеристик перемещения указанного первого сближающегося космического аппарата,
- вычислять координаты положения X(t), Y(t), Z(t) указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом в любой момент t с учетом координат положения X1, Y1, Z1 и составляющих скорости Xp1, Yp1 и Zp1, рассчитанных в момент t1.
Если второй сближающийся космический аппарат обитаем, наблюдение за первым приближающимся космическим аппаратом может производиться визуально. Однако, независимо от того обитаем или не обитаем второй сближающийся космический аппарат, предпочтительно с целью автоматизирования видимых измерений положения и величины, выполнять наблюдение за первым сближающимся космическим аппаратом с помощью устройства для съемки выдающего изображение в масштабе изображения получаемого в случае прямого наблюдения, которое позволяло бы проводить, например, благодаря соответствующим калиброванным шкалам, совмещенным с изображением, необходимые измерения местоположения и азимута.
Если оптическая ось указанного устройства для съемки смещена по отношению к вектору скорости указанного второго сближающегося космического устройства, соответствующие корректировки вносятся в значения местоположения и азимута s1, s2, ag1, ad1, ag2 и ad2, перед вычислением координат X1, Y2, Z1, X2, Y2, Z2.
Поставленная задача решается также тем, что в устройстве для определения относительного положения и естественной относительной траектории второго сближающегося космического аппарата относительно первого сближающегося космического аппарата, находящихся на участках их соответствующих орбит, где их векторы скорости относительно геоцентрической системы отсчета, по меньшей мере, приблизительно параллельны и указанный первый сближающийся космический аппарат стабилизирован тремя точками на своей орбите, содержащем средства наблюдения, установленные на борту указанного второго сближающегося космического аппарата, средства измерения для определения видимого размера указанного первого сближающегося космического аппарата и вычислительные устройства для вычисления расстояния между первым и вторым сближающимися космическими аппаратами на основе видимого и реального размеров указанного второго сближающегося космического аппарата, согласно изобретению
- средства наблюдения, выполнены с возможностью наблюдения за первым сближающимся космическим аппаратом в плоскости (OZ, OY), связанной с ним, перпендикулярной к оси средств наблюдения и проходящей через точку (о) отсчета указанного второго сближающегося космического аппарата,
- средства измерения, выполнены с возможностью измерения в каждый из двух последовательных моментов времени t1 и t2, видимого положения указанного первого сближающегося космического аппарата в указанной плоскости и по отношению к указанной точке отсчета указанного второго сближающегося космического аппарата, а также видимого размера указанного первого сближающегося космического аппарата в указанной плоскости, при этом упомянутое устройство дополнительно содержит:
- первые вычислительные устройства для вычисления в каждый из указанных моментов t1 и t2, с помощью указанных измерений положения и видимых размеров, а также реального размера указанного первого сближающегося аппарата, положения указанной точки отсчета указанного второго сближающегося космического аппарата, в системе отсчета, связанной с указанным первым сближающимся космическим аппаратом,
- вторые вычислительные устройства для вычисления с учетом двух положений указанной точки отсчета, вычисленных в моменты t1 и t2, а также известных характеристик перемещения указанного первого сближающегося космического аппарата на его орбите, и в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом и в момент времени t1, составляющих относительной скорости указанного второго сближающегося космического аппарата относительно указанного первого сближающегося космического аппарата, и
- третьи вычислительные устройства для вычисления, с учетом положения указанной точки отсчета вычисленной в момент времени t1 и указанных составляющих относительной скорости, также вычисленных в момент времени t1 в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом, координат положения указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом в любой момент времени t.
В случае, если указанный первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L полезно,
- чтобы, в каждый из указанных моментов времени t1 и t2, указанные средства измерения измеряли значение s1 или s2, соответственно, местоположения начала указанной системы отсчета, связанной с указанным первым сближающимся космическим аппаратом, по отношению к указанной точке отсчета соединенной с указанным вторым сближающимся космическим аппаратом и
измеряли, соответственно, значения ag1, ad1 или ag2, ad2 азимутов левой и правой концевых частей первого сближающегося космического аппарата относительно указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом,
- указанные первые вычислительные устройства рассчитывали с учетом размаха L и с учетом измерений местоположения и азимута s1, ag1, ad1 или s2, ag2, ad2 соответственно соответствующие координаты положения X1, Y1, Z1, X2, Y2, Z2, указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом, в указанной системе отсчета, связанной с указанным вторым сближающимся космическим аппаратом, в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом,
- указанные вторые вычислительные устройства рассчитывали с учетом координат положения X1, Y1, Z1 и X2, Y2, Z2, вычисленные в моменты времени t1 и t2; а также с учетом известных характеристик перемещения указанного первого сближающегося космического аппарата на его орбите, и в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом, составляющие Xp1, Yp1, Zp1 относительной скорости указанного второго сближающегося космического аппарата по отношению к указанному первому сближающемуся космическому аппарату, и
- указанные третьи вычислительные устройства вычислили по координатам положения X1, Y1, Z1 и составляющих скорости Xp1, Yp1, Zp1, рассчитанных в момент времени t1, координаты положения X(t), Y(t), Z(t) указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом в любой момент времени t.
Несмотря на то, что в качестве указанных средств измерения могут быть представлены многие виды, в предпочтительном способе осуществления, они предусматривают наличие телевизионного устройства, присоединенного к фотосъемочному устройству и снабженного экраном, в котором каждая точка может быть идентифицирована положением подвижной сетки, перемещаемой под действием устройства управления.
В дальнейшем изобретение поясняется описанием примеров его выполнения со ссылками на чертежи, на которых:
Фиг. 1 изображает схему двух космическим аппаратов в фазе сближения,
Фиг. 2 - схему, иллюстрирующую принцип настоящего изобретения,
Фиг. 3 - блок-схему устройства соответствующего настоящему изобретению.
На фиг. 1 представлены два космических аппарата 1 и 2 в подготовительной фазе сближения.
Космический аппарат 1, например, обитаемая космическая станция, движется по орбите 3. Такая орбита 3 может быть кольцевой вокруг Земли (не показана), а космический аппарат 1 может проходить по орбите 3 равномерно, таким образом, что он равномерно вращается вокруг Земли. Космическому аппарату 1 применяют локальную систему отсчета OX, OY, OZ, сопровождающую указанный космический аппарат 1 в его вращательном движении вокруг Земли.
Начало О указанной системы отсчета может быть центром тяжести космического аппарата 1, в то время как вертикальная ось OZ указанной системы отсчета постоянно направлена к центру Земли, во время вращательного движения указанного космического аппарата 1 на его орбите 3. Ось OX указанной местной орбитальной системы отсчета направлена по вектору скорости  (по отношению к Земле) космического аппарата 1, перемещающегося по своей орбите 3. Ось OX таким образом проходит по касательной к указанной орбите 3, и располагается в плоскости последней. Космический аппарат 1 стабилизирован тремя осями на своей орбите 3. Он имеет панели солнечных батарей 4, известный размах которых постоянно параллелен оси OY, ортогональной осям OX и OZ. Плоскость OX, OY определяет горизонтальную плоскость космического аппарата 1.
(по отношению к Земле) космического аппарата 1, перемещающегося по своей орбите 3. Ось OX таким образом проходит по касательной к указанной орбите 3, и располагается в плоскости последней. Космический аппарат 1 стабилизирован тремя осями на своей орбите 3. Он имеет панели солнечных батарей 4, известный размах которых постоянно параллелен оси OY, ортогональной осям OX и OZ. Плоскость OX, OY определяет горизонтальную плоскость космического аппарата 1.
Космический аппарат 2, например, обитаемый космический челночный аппарат, описывает орбиту 5. К космическому аппарату 2 привязывают локальную орбитальную систему отсчета ox, oy, oz сопровождающую указанный космический аппарат 2 в его движении по его орбите 5. Началом O указанной локальной орбитальной системы отсчета может быть центр тяжести космического аппарата 2, в то время как вертикальная ось oz постоянно направлена к центру Земли, во время движения указанного космического аппарата 2 по его орбите 5. Ось OX ориентирована по вектору скорости  (по отношению к Земле) космического аппарата 2 на его орбите 5. Таким образом ось OX проходит по касательной к орбите 5 и расположена в плоскости этой последней. Ось OY ортогональна осям OX и OY и плоскость OX, OY горизонтальна.
(по отношению к Земле) космического аппарата 2 на его орбите 5. Таким образом ось OX проходит по касательной к орбите 5 и расположена в плоскости этой последней. Ось OY ортогональна осям OX и OY и плоскость OX, OY горизонтальна.
Фиг. 1 иллюстрирует пример стыковки, в которой сближающийся космический аппарат (аппарат 2) прослеживает сближающийся космический аппарат (аппарат 1). Настоящее изобретение также применимо в случае, когда сближающийся космический аппарат 1 догоняет сближающийся космический аппарат 2. Если оси OX и OX параллельны, и, если с космического аппарата 2 выполняют визирование по оси OX в направлении космического аппарата 1, получают картину показанную на фиг. 2. В результате визирования, космический аппарат 1 появляется с видимым размахом LA, панелей солнечных элементов 4 (с реальным размахом L), в положении, смещенном относительно системы отсчета OX, OY, OZ. Разумеется, видимый размах LA непосредственно отображает расстояние D, разделяющее два космических аппарата 1 и 2.
Положение космического аппарата 1, относительно системы отсчета ox, oy, oz, связанной с космическим аппаратом 2, может определяться:
- углом места s между горизонтальной плоскостью ox, oy и центром О космического аппарата 1,
- углом азимута ag между вертикальной плоскостью ox, oz и левой концевой частью панелей солнечных элементов 4, и
- углом азимута ad между вертикальной плоскостью ox, oz и правой концевой частью панелей солнечных элементов 4.
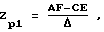
Каждый из этих трех углов мог бы, например, измеряться при вращении визирной поворотной трубки (не показано), перемещаемой между исходным положением, для которого его оптическая ось совмещается с осью ox, и положением визирования, для которого указанная оптическая ось направляется, соответственно, к оси OY и к концевым частям указанных панелей солнечных батарей 4. В противовес Фиг. 3, описаны другие средства измерения (II). Простой расчет показывает, что в системе отсчета OX, OY, OZ связанной с космическим аппаратом 1, координаты относительного положения X, Y и Z точки отсчета O соединенной с космическим аппаратом 2, составляют соответственно: .
.
Расстояние может быть рассчитано в этом случае по формуле: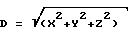 .
.
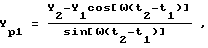
Согласно изобретению, для определения естественной относительной траектории космического аппарата 2 по отношению к космическому аппарату 1, вычисляют в два последовательных момента t1 и t2, значение координат X, Y и Z вышеуказанным методом. Получают таким образом две группы значений X1, Y1, Z1 и X2, Y2, Z2, по которым можно определить, в момент времени t1, составляющие Xp1, Yp1, Zp1 относительной скорости космического аппарата 2 в системе отсчета OX, OY, OZ. Временной промежуток между моментами t1 и t2 выбран для того, чтобы координаты X1, Y1, Z1 и X2, Y2, Z2 соответствовали достаточному изменению положения для космического аппарата 2, чтобы измерений было показательным.
Затем благодаря тому, что известны в момент t1, координаты положения X1, Y1, Z1 и составляющие скорости Xp1, Yp1, Zp1 можно предсказать будущую относительную траекторию космического аппарата 2.
В случае упомянутом выше, когда орбита 3 является круговой и описана равномерно движущимися космическим аппаратом 1, с орбитальной угловой скоростью, равной ω , можно показать, что:
с: .
.
Поскольку известны координаты X1, Y1, Z1 и скорость Xp1, Yp1 и Zp1 в момент времени t1 первого сближающегося космического аппарата 2 относительно второго сближающегося космического аппарата 1, возможно предсказать будущую естественную траекторию, вычисляя ее поточечно.
В любой момент t, положение (X(t), Y(t), Z(t)) космического аппарата 2 по отношению к космическому аппарату 1 будет определяться соотношениями: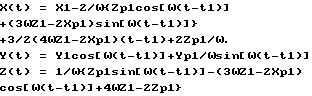 .
.
В предыдущих расчетах предполагалось, что визирование происходило параллельно оси ox и что угол крена второго сближающегося космического аппарата 2 был нулевым. Если визирование (например, выполненное как указано ниже, с помощью камеры, оптическая ось которой может не совпадать с осью ox) не параллельно оси ox и/или, если угол крена космического аппарата 2 не нулевой, вводят коррективы на этапе вычисления X1, Y1, Z1 и X2, Y2, Z2.
На фиг. 3 изображен вариант выполнений устройства, соответствующий настоящему изобретению. Этот способ осуществленный на борту космического аппарата 2, имеет камеру 10 наблюдения за космическим аппаратом 1, телевизионное устройство 11 и три средства расчета 12, 13 и 14, перегруппированные при необходимости в единый вычислитель 15.
Телевизионное устройство 11 содержит экран 16 такого типа в котором сетки 17, 18 и 19 соответственно подвижные под действием органов управления 20, 21, 22 (например, вращающиеся кнопки), могут быть перемещены на упомянутый экран 16 указывая их положение на нем. Таким образом, камера 10 формирует на экране видимое изображение космического аппарата 1, размер которого находится в масштабе видимого размера, как если бы прямое наблюдение указанного космического аппарата 1 осуществлялось бы из космического аппарата 2. В момент времени t1, орган управления 20 приводится в действие с тем, чтобы сетка 17 проходила через среднюю горизонтальную плоскость указанного изображения, таким образом, чтобы телевизионное устройство 11 зафиксировало значение местоположения s1. В этот же момент времени t1, органы управления 21 и 22 также приводятся в действие с тем, чтобы сетки 18 и 19 были приведены на левый и правый предел размаха указанного изображения аппарата 1. Таким образом получают азимутальные измерения ag1 и ad1. В момент t2, аналогичным образом перемещают указанные сетки 17, 18 и 19, чтобы телевизионное устройство 11 зафиксировало измерения s2, ag2 и ad2.
Эти измерения s1, s2, ag1, ad1, ag2 и ad2 адресуются вычислительным устройствам 12 (связь 23), которые располагают информацией размаха L и которые вычисляют координаты X1, Y1, Z1 и X2, Y2, Z2, способом, описанным выше. Эти координаты, в свою очередь, передаются вычислительным средствам 13 (связь 24) располагающим информацией о пульсации, которые определяют, как это было указано, составляющие скорости Xp1, Yp1 и Zp1.
Наконец через связи 25, координаты X1, Y1, Z1 и составляющие Xp1, Yp1, Zp1 передаются на вычислительные средства (14) на выходе которых получают значения X(t), Y(t), Z(t). Описанное устройство фиг. 3 является лишь возможным вариантом осуществления устройства по настоящему изобретению. Действительно, телевизионное устройство 11 могло быть заменено автоматическим устройством развертки изображения с целью полной автоматизации устройства изобретения, или же комплект из камеры 10 и телевизионного устройства 11 могли быть заменены градуированным коллиматором или прицелом на коллиматорном индикаторе, для сбора оператором результатов измерений s1, s2, ag1, ag2, ad1 и ad2, которые затем вошли бы в калькулятор 15.1


Использование: космонавтика. Сущность: в способе и устройстве для определения относительного положения и естественной относительной траектории второго сближающегося космического аппарата относительно первого сближающегося космического аппарата в каждый из двух последовательных моментов t1 и t2 измеряют видимое положение и видимый размер указанного первого сближающегося космического аппарата и вычисляют положение точки отсчета (о) указанного второго сближающегося космического аппарата, вычисляют составляющие относительной скорости указанного второго сближающегося космического аппарата относительно указанного первого сближающегося космического аппарата, и вычисляют координаты положения указанной точки отсчета соединенной с указанным вторым сближающимся космическим аппаратом в любой момент времени t. 2 с. и 8 з. п. ф-лы, 3 ил.


6. Способ по п.5, отличающийся тем, что координаты положения X(t), Y(t), Z(t) определяют из соотношений
7. Устройство для определения относительного положения и естественной относительной траектории второго сближающегося космического аппарата относительно первого сближающегося космического аппарата, находящихся на участках их соответствующих орбит, где их векторы скорости относительно геоцентрической системы отсчета по меньшей мере приблизительно параллельны, и указанный первый сближающийся космический аппарат стабилизирован тремя точками на своей орбите, содержащее средства наблюдения, установленные на борту указанного второго сближающегося аппарата, средства измерения для определения видимого размера указанного первого сближающегося космического аппарата и вычислительные устройства для вычисления расстояния между первым и вторым сближающимися космическими аппаратами на основе видимого и реального размеров указанного второго сближающегося космического аппарата, отличающееся тем, что средства наблюдения выполнены с возможностью наблюдения за первым сближающимся космическим аппаратом в плоскости (OZ, OY), связанной с ним, перпендикулярной к оси средств наблюдения и проходящей через точку (O) отсчета указанного второго сближающего космического аппарата, средства измерения выполнены с возможностью измерения в каждый из двух последовательных моментов времени t1 и t2, видимого положения указанного первого сближающегося космического аппарата в указанной плоскости и по отношению к указанной точке отсчета указанного второго сближающегося космического аппарата, а также видимого размера указанного первого сближающегося космического аппарата в указанной плоскости, при этом упомянутое устройство дополнительно содержит первые вычислительные устройства для вычисления в каждый из указанных моментов t1 и t2 с помощью указанных измерений положения и видимых размеров, а также реального размера указанного первого сближающего аппарата, положения указанной точки отсчета указанного второго сближающегося космического аппарата, в системе отсчета, связанной с указанным первым сближающимся космическим аппаратом, вторые вычислительные устройства для вычисления с учетом двух положений указанной точки отсчета, вычисленных в моменты времени t1 и t2, а также известных характеристик перемещения указанного первого сближающегося космического аппарата на его орбите, и в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом и в момент времени t1, составляющих относительной скорости указанного второго сближающегося космического аппарата относительно указанного первого сближающегося космического аппарата, и третьи вычислительные устройства для вычисления с учетом положения указанной точки отсчета вычисленной в момент времени t1 и указанных составляющих относительной скорости, также вычисленных в момент времени t1 в указанной системе отсчета, связанной с указанным первым сближающимся космическим аппаратом, координат положения указанной точки отсчета, связанной с указанным вторым сближающимся космическим аппаратом в любой момент времени t.
| DE, патент, 4019214, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

