Предлагаемое изобретение касается поворотного силового привода или подъемника, содержащего внутренний корпус и по меньшей мере один наружный корпус, смонтированные коаксиально один в другом таким образом, чтобы они могли быть приведены в относительное вращательное движение, причем в каждом из упомянутых корпусов имеются лопатки, располагающиеся чередующимся образом для того, чтобы сформировать две совокупности герметичных камер управления переменного объема.
Предлагаемое изобретение касается также некоторой рулевой поверхности летательного аппарата, содержащей по меньшей мере одну шарнирно закрепленную панель, угловое отклонение которой обеспечивается таким поворотным подъемником или поворотным силовым приводом.
Обычно в подобных конструкциях упомянутые выше внутренний корпус и наружный корпус поворотных подъемников имеют цилиндрическую форму и высота лопаток, принадлежащих каждому из этих корпусов, одинакова на всем их продольном протяжении. Количество лопаток, имеющихся в таком поворотном силовом приводе, зависит главным образом от требуемой амплитуды поворотного движения.
С учетом упомянутого выше условия такие поворотные подъемники используются для управления относительным поворотным движением ограниченной амплитуды между двумя деталями. При этом поворотные подъемники описанного типа представляют существенное преимущество, занимая весьма небольшое пространство, поскольку они могут быть установлены вдоль оси относительного поворота между двумя деталями. Для сравнения отметим, что управление таким же самым движением при помощи линейного подъемника или силового привода требует установки этого подъемника на одной из двух упомянутых деталей перпендикулярно к оси управляемого таким образом поворота и соединения его с другой деталью при помощи специального механизма, включающего по меньшей мере одну шарнирную тягу.
В подъемнике или поворотном силовом приводе описываемого типа давление гидравлической жидкости, подаваемое попеременно в каждую из двух упомянутых выше совокупностей внутренних герметичных камер, стремится деформировать в противоположных направлениях внутренний корпус и наружный корпус этого устройства. Вследствие этого герметичность камер, требуемая при функционировании данного подъемника, может быть обеспечена только в том случае, когда длина этого подъемника не превышает некоторой вполне определенной величины для данного значения рабочего давления гидравлической жидкости. Поворотный подъемник обычной цилиндрической конструкции не может, таким образом, быть использован для управления относительным поворотом двух деталей в том случае, когда шарнирный момент, который необходимо приложить между этими деталями, превышает некоторую вполне определенную величину.
Когда шарнирный момент, который желательно приложить между двумя упомянутыми деталями, достаточно велик, можно установить встык торцами друг к другу два поворотных подъемника описанного выше типа, каждый из которых способен развивать момент, равный половине требуемого в данном случае максимального шарнирного момента. Однако применение такого технического решения приводит к существенному возрастанию стоимости данной установки, в частности, вследствие увеличения числа шарниров, служащих для передачи усилий между упомянутыми подъемниками и каждой из взаимно поворачивающихся деталей. Действительно, один цилиндрический поворотный подъемник обычного типа присоединен, как правило, к двум шарнирам на каждой из двух шарнирно соединенных деталей, относительным поворотным движением которых данный подъемник управляет. Использование двух таких подъемников для управления аналогичным движением потребует, таким образом, наличия восьми шарниров.
Известен силовой гидравлический цилиндр поворотного движения, состоящий из внутреннего и наружного корпусов, смонтированных коаксиально один в другом с образованием между ними одного кольцевого пространства, лопаток, жестко связанных с внутренним и наружным корпусами соответственно и чередующихся в кольцевом пространстве для формирования чередующихся друг с другом герметичных камер управления переменного объема для управления относительным поворотом между внутренним и наружными корпусами (см. авт. св. СССР 168090, кл. B 64 C 13/36, опубл. 06.04.65).
Преимущества сравнительно небольших габаритных размеров, предоставляемые поворотными силовыми приводами или подъемниками, делают особенно привлекательным их использование для управления рулевыми поверхностями летательных аппаратов, в частности элевонами, которыми оснащены сверхзвуковые самолеты.
Действительно, отсек для размещения таких поворотных силовых приводов в передней кромке упомянутых рулевых поверхностей исключает любые аэродинамические возмущения, вызываемые обычно наличием линейных силовых приводов, управляющих этими рулевыми поверхностями, несмотря на возможное использование специальных обтекателей для этих силовых приводов.
Вследствие того что управляемые рулевые поверхности имеют собственную жесткость, отличающуюся от собственной жесткости крыла, в полете проявляются различия между деформациями рулевых поверхностей и крыла, на котором закреплены эти рулевые поверхности. По аэродинамическим соображениям максимальные величины упомянутых различий должны быть по возможности сведены до минимума. Такое требование может привести к реализации каждой рулевой поверхности в виде нескольких отдельных панелей, которые в этом случае должны управляться независимо одна от другой. В предположении, что на каждой такой панели будут использованы по два цилиндрических поворотных силовых привода, размещение этих силовых приводов в данной рулевой поверхности в целом потребует наличия шестнадцати или двадцати четырех шарниров в зависимости от того, на две или на три отдельных панели будет разрезана данная рулевая поверхность.
В то же время требуемое правилами безопасности резервирование обычно заставляет управлять рулевыми поверхностями летательных аппаратов при помощи трех независимых гидросистем. Учет этого требования совместно с реализацией рулевых поверхностей в виде нескольких отдельных панелей естественным образом приводит к разрезанию каждой рулевой поверхности именно на три панели. В этом случае применение цилиндрических поворотных силовых приводов потребует использования шести таких приводов для каждой рулевой поверхности, что приводит к наличию в данной системе двадцати четырех шарниров. Это обстоятельство делает такое техническое решение слишком дорогостоящим и практически неприемлемым.
Известна рулевая поверхность летательного аппарата, содержащая, по меньшей мере, одну панель, шарнирно связанную с задним лонжероном несущей поверхности относительно некоторой оси шарнирного соединения, строго параллельной заднему лонжерону, и средства управления поворотным движением рулевой поверхности вокруг оси шарнирного соединения (см. патент США N 4498647, кл. B 64 C 9/02, опубл. 12.02.85).
Объектом предлагаемого изобретения является главным образом поворотный силовой привод оригинальной конструкции, обеспечивающей, в частности, при заданных диаметральных габаритных размерах существенно более высокую мощность по сравнению с обычным цилиндрическим поворотным силовым приводом.
Объектом предлагаемого изобретения является также поворотный силовой привод, оригинальная конструкция которого позволяет уменьшить количество необходимых шарниров для передачи усилий между поворотным силовым приводом и взаимно отклоняющимися деталями, а следовательно, и стоимость конструкции, в котором используются также поворотные силовые привода.
Объектом предлагаемого изобретения является также поворотный силовой привод, оригинальная конструкция которого дает возможность в определенной степени уменьшить крутильные деформации или деформации кручения по меньшей мере одного из корпусов, внутреннего или внешнего, данного поворотного силового привода по сравнению с поворотным силовым приводом обычной конструкции.
В соответствии с предлагаемым изобретением упомянутые выше результаты достигаются при помощи поворотного силового привода или подъемника, содержащего один внутренний корпус и по меньшей мере один наружный корпус, смонтированные коаксиально один в другом таким образом, чтобы сформировать в пространстве между этими корпусами по меньшей мере одно кольцевое пространство, первые лопатки, жестко связанные с упомянутым внутренним корпусом данного поворотного силового привода, и вторые лопатки, жестко связанные соответственно с наружным корпусом этого поворотного силового привода, причем упомянутые лопатки обоих корпусов располагаются чередующимся образом в упомянутом кольцевом пространстве с тем, чтобы определить в данном кольцевом пространстве попеременно первые и вторые герметичные камеры управления переменного объема, попеременная подача рабочего гидравлического давления в которые дает возможность управлять относительным поворотом упомянутых выше внутреннего и наружного корпусов данного поворотного силового привода, отличающегося тем, что по меньшей мере один из упомянутых выше внутреннего и наружного корпусов имеет эволютивное или изменяющееся поперечное сечение таким образом, что упомянутые первые и вторые лопатки характеризуются высотой, которая уменьшается от одного конца этих лопаток к другому их концу.
Поворотный силовой привод или подъемник, отвечающий приведенному выше определению, в последующем изложении будет называться "поворотным подъемником". Это определение, которое вытекает из упомянутого выше эволютивного или изменяющегося характера поперечного сечения кольцевого пространства, сформированного между внутренним и наружным корпусами данного подъемника, не должно рассматриваться в качестве характеристики, ограничивающей конкретную конфигурацию этого кольцевого пространства некоторой точно определенной геометрической формой.
В предпочтительном варианте реализации предлагаемого изобретения наружный корпус поворотного силового привода или подъемника имеет цилиндрическую форму и характеризуется постоянным по величине поперечным сечением, тогда как внутренний корпус поворотного силового привода или подъемника характеризуется переменным или эволютивным поперечным сечением.
В этом случае упомянутый внутренний корпус данного подъемника может иметь, в частности, некоторую коническую часть и некоторую цилиндрическую часть, продолжающую конец относительно меньшего диаметра упомянутой конической части данного внутреннего корпуса поворотного силового привода в соответствии с предлагаемым изобретением.
Конец относительно большого диаметра конической части внутреннего корпуса имеет в этом случае наружный диаметр, существенно равный внутреннему диаметру наружного корпуса.
В предпочтительном варианте реализации предлагаемого изобретения внутренний корпус поворотного силового привода или подъемника образует ротор этого подъемника, тогда как его наружный корпус образует статор. Однако в некоторых специальных случаях практического применения данного подъемника может быть принято и обратное расположение упомянутых элементов, то есть внутренний корпус может выступать в качестве статора, тогда как наружный корпус данного подъемника может играть роль ротора.
В предпочтительном варианте реализации внутренний корпус предлагаемого подъемника представляет собой корпус цилиндрической формы или трубчатый корпус. Эта характеристика дает возможность связать внутренний корпус поворотного силового привода или подъемника с контуром поддержания необходимой температуры, обеспечивающим циркуляцию во внутренней полости данного подъемника некоторого жидкого теплоносителя, способного нагреть или охладить данный подъемник в зависимости от конкретных условий его эксплуатации.
В предпочтительном варианте реализации предлагаемого изобретения поворотный подъемник содержит два наружных корпуса, смонтированных коаксиально на двух частях внутреннего корпуса, причем на каждой из этих двух частей внутреннего корпуса установлены упомянутые вторые лопатки, располагающиеся чередующимся образом с первыми лопатками, установленными на каждом из упомянутых наружных корпусов.
В этом случае предлагаемый поворотный силовой привод или подъемник предпочтительно характеризуется симметрией по отношению к средней плоскости, пересекающей внутренний корпус данного подъемника в его середине.
Кроме того, высота первых и вторых лопаток уменьшается, начиная от упомянутой средней плоскости данного подъемника в направлении его концов.
В предпочтительном варианте реализации внутренний корпус предлагаемого подъемника содержит между двумя частями, в которых располагаются вторые лопатки, центральную часть передачи усилия. Кроме того, каждый из наружных корпусов этого подъемника содержит оконечную часть передачи усилий, располагающуюся в непосредственной близости от концов данного подъемника.
Объектом предлагаемого изобретения является также рулевая поверхность летательного аппарата, содержащая по меньшей мере одну панель, шарнирно присоединенную к заднему лонжерону несущей поверхности этого летательного аппарата и способную поворачиваться относительно оси шарнирного соединения, строго параллельной упомянутому заднему лонжерону, и средства управления поворотным движением упомянутой панели вокруг этой оси шарнирного соединения, отличающаяся тем, что упомянутые средства управления поворотным движением этой панели содержат по меньшей мере один поворотный силовой привод или подъемник в соответствии с предлагаемым изобретением, установленный в данной поворотной панели по оси ее шарнирного присоединения к упомянутому заднему лонжерону.
Концевые части упомянутого поворотного подъемника, предназначенные для передачи усилий, в этом случае монтируются в первых шарнирах, закрепленных на упомянутом заднем лонжероне данной несущей поверхности летательного аппарата, а центральная часть этого подъемника, также предназначенная для передачи усилий, монтируется во втором шарнире, закрепленном на отклоняемой панели. Благодаря этой характеристике конструкции предлагаемой рулевой поверхности и поворотного подъемника легко видеть, что управление разрезной рулевой поверхностью, образованной тремя отдельными панелями, требует использования только девяти различных шарниров. Таким образом, количество используемых шарниров уменьшается примерно на две трети по отношению к рулевой поверхности, для управления которой используются обычные цилиндрические поворотные подъемники.
Для того чтобы деформации данной несущей поверхности, связанные с ее изгибом, не передавались на поворотный подъемник управления данной рулевой поверхностью, каждый из упомянутых первых шарниров располагается на упомянутом заднем лонжероне этой несущей поверхности таким образом, чтобы иметь возможность поворачиваться относительно некоторой первой оси, перпендикулярной этому лонжерону и проходящей через ось шарнирного присоединения панели рулевой поверхности.
Для того чтобы обеспечить передачу усилия между данной несущей поверхностью летательного аппарата и наружным корпусом поворотного подъемника, каждый из упомянутых выше первых шарниров находится в зацеплении с предназначенными для передачи усилий концевыми частями при помощи первых средств связи по вращательному движению вокруг оси шарнирного соединения данной панели. Кроме того, передача усилий между внутренней трубкой или внутренним корпусом данного поворотного подъемника и данной панелью рулевой поверхности обеспечивается при помощи вторых средств связи по вращательному движению относительно оси шарнирного соединения этой панели, благодаря которым упомянутый второй шарнир панели рулевой поверхности находится в зацеплении с центральной частью данного поворотного подъемника, предназначенной для передачи усилий. Эти первые и вторые средства связи по вращательному движению образованы пазами или канавками или же любым другим эквивалентным механизмом зацепления, позволяющими непосредственно обеспечить передачу усилий в ближайшей окрестности от панелей наружной обшивки данной несущей поверхности летательного аппарата.
Для того чтобы обеспечить упомянутую выше связь между наружным корпусом поворотного подъемника и данной несущей поверхностью летательного аппарата в направлении оси шарнирного присоединения к ней данной панели рулевой поверхности, позволяющую или допускающую дифференциальную деформацию несущей поверхности летательного аппарата по отношению к данному поворотному подъемнику, один из упомянутых первых шарниров находится в зацеплении с одной из концевых частей поворотного подъемника в соответствии с предлагаемым изобретением, предназначенной для передачи усилий, при помощи первых средств связи по поступательному движению вдоль упомянутой выше оси шарнирного соединения данной управляющей или рулевой поверхности с несущей поверхностью летательного аппарата. Напротив того, другой из двух упомянутых выше первых шарниров является свободным по поступательному перемещению параллельно этой оси шарнирного соединения по отношению к другой концевой части данного поворотного подъемника, предназначенной для передачи усилий. Аналогичным или сопоставимым образом второй шарнир находится в зацеплении с центральной частью данного поворотного подъемника, предназначенной для передачи усилий при помощи вторых средств связи по поступательному движению вдоль упомянутой выше оси шарнирного соединения данной рулевой поверхности с задним лонжероном соответствующей несущей поверхности летательного аппарата.
В предпочтительном варианте практической реализации управляющей поверхности или рулевой поверхности в соответствии с предлагаемым изобретением эта рулевая поверхность содержит по меньшей мере две самостоятельных панели, связанные между собой по меньшей мере одним соединительным звеном, причем упомянутый силовой поворотный подъемник располагается в каждой из панелей упомянутой рулевой поверхности.
Теперь в качестве примера, не являющегося ограничительным, будет дано описание предпочтительного варианта практической реализации предлагаемого изобретения, в котором даются ссылки на фигуры, среди которых:
- фиг. 1 представляет собой схематический вид сверху сверхзвукового пассажирского самолета, для управления которого использованы элевоны, управление которыми может быть осуществлено при помощи гидравлических поворотных силовых приводов или подъемников в соответствии с предлагаемым изобретением;
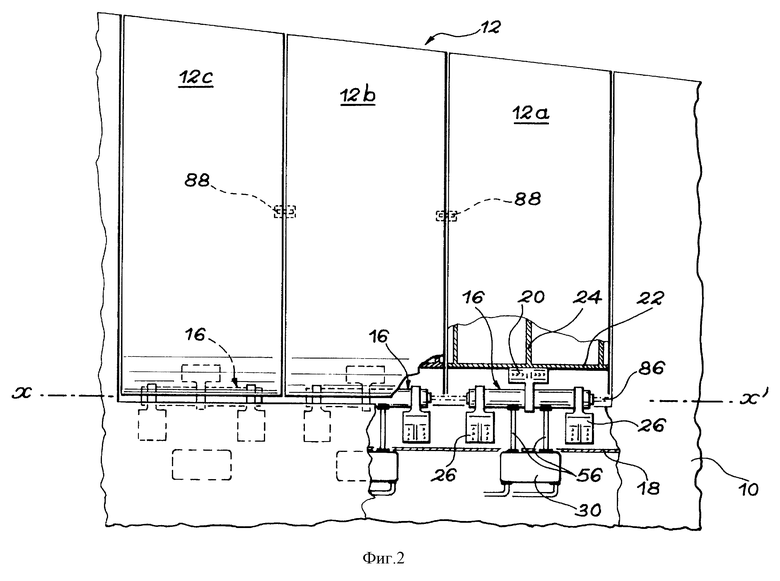
- фиг. 2 представляет собой вид сверху с частичным разрезом или вырывом в увеличенном масштабе особенности установки поворотных подъемников или поворотных силовых приводов управления одним из внутренних элевонов летательного аппарата, схематически представленного сверху на фиг. 1;
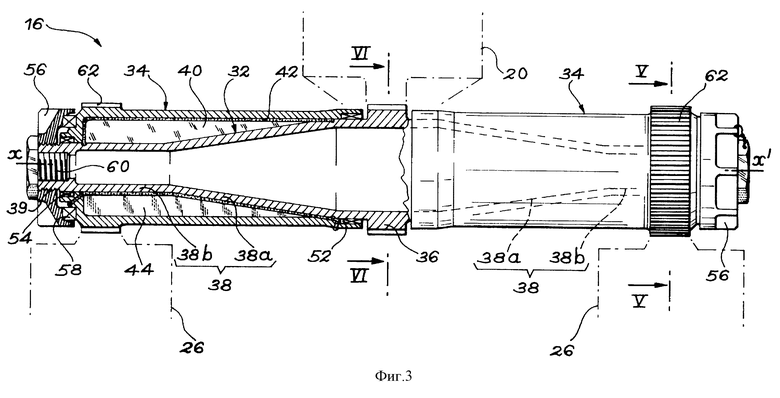
- фиг. 3 представляет собой вид сверху в увеличенном масштабе и в частичном продольном разрезе один из гидравлических поворотных силовых приводов или подъемников управления внутренним элевоном в соответствии с предлагаемым изобретением;
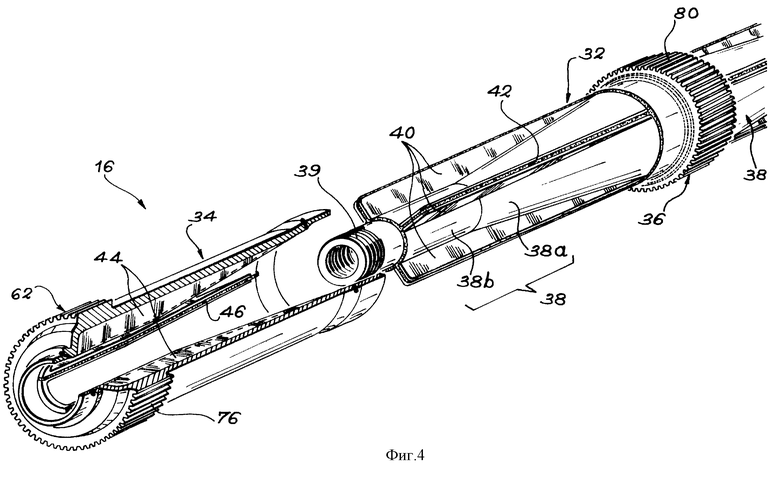
- фиг. 4 представляет собой перспективный вид в фигурном разрезе одной из частей поворотного подъемника в соответствии с предлагаемым изобретением, показанного на фиг. 3;
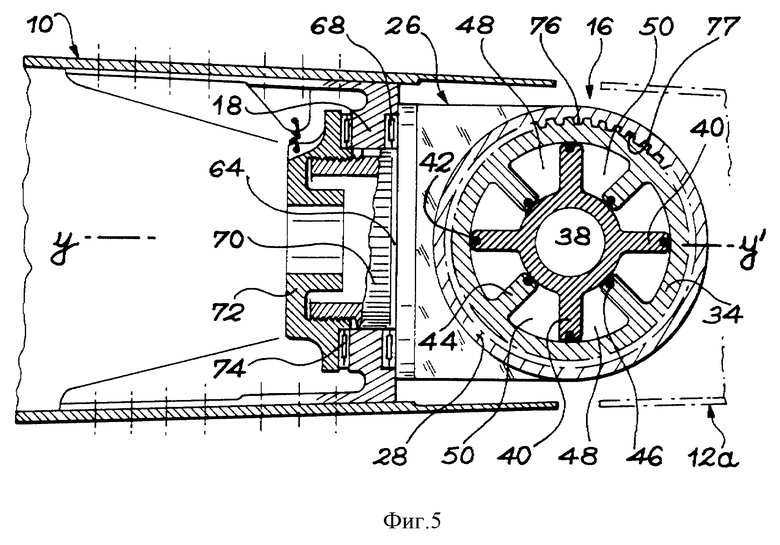
- фиг. 5 представляет вид в разрезе по линии V-V, показанной на фиг. 3, демонстрирующей в увеличенном масштабе один из шарниров, при помощи которых упомянутые выше поворотные силовые приводы или подъемники соединяются с задним лонжероном соответствующего полукрыла летательного аппарата;
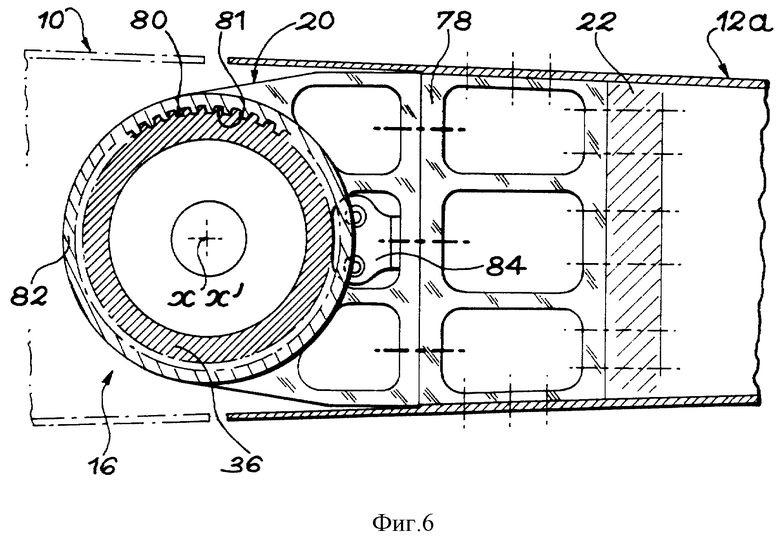
- фиг. 6 представляет вид в разрезе по линии VI-VI, показанной на фиг. 3, демонстрирующий шарнир, при помощи которого упомянутый подъемник или поворотный силовой привод соединяется с соответствующей панелью разрезного внутреннего элевона сверхзвукового летательного аппарата, схематически показанного на фиг. 1.
Теперь будет более подробно описан предпочтительный вариант практической реализации поворотного силового привода или подъемника в соответствии с предлагаемым изобретением на примере его использования для управления элевонами сверхзвукового пассажирского самолета. В предлагаемом описании будет показано, что преимущества, предоставляемые поворотными силовыми приводами или подъемниками в соответствии с предлагаемым изобретением, могут быть признаны полезными при использовании одного или нескольких таких приводов или подъемников во многих других случаях применения, отличающихся от описанного здесь варианта применения.
На схематическом чертеже, представленном на фиг. 1, позицией 10 обозначено каждое из несущих поверхностей сверхзвукового летательного аппарата. Каждая из несущих поверхностей 10 содержит на своей задней кромке внутренний элевон 12, средний элевон 14 и наружный или внешний элевон 16. Эти элевоны в совокупности образуют управляющие поверхности данного летательного аппарата, выполняющие различные функции, в частности функции управления креном и тангажом.
Каждый из элевонов 12, 14 и 16 смонтирован с возможностью поворота в обе стороны относительно продольной оси несущей поверхности на заднем лонжероне 18 /см. фиг. 2/ этой несущей поверхности. Этот поворот осуществляется вокруг оси xx', строго параллельной этому лонжерону. Каждый элевон имеет возможность ограниченного определенным образом отклонения от своего нейтрального положения, например, на величину ± 25o по отношению к его среднему положению, в котором этот элевон составляет единое целое по форме с соответствующей несущей поверхностью, т.е. установлен на одной продольной оси с этой несущей поверхностью.
Для того чтобы одновременно учесть различную жесткость элевонов 12 и 14 и соответствующих несущих поверхностей, а также необходимость управления каждым из упомянутых выше элевонов от трех независимых гидросистем с целью обеспечения требуемого из соображений безопасности резервирования, каждый из элевонов 12 и 14 выполняется в виде трех отдельных примыкающих друг к другу панелей одинаковых размеров по направлению заднего лонжерона соответствующей несущей поверхности 18. Эти три отдельных панели каждой рулевой поверхности обозначены позициями 12a, 12b и 12c для внутренних элевонов 12 и позициями 14a, 14b и 14c для средних элевонов 14. В соответствии с предлагаемым изобретением каждая из упомянутых выше панелей рулевой поверхности 12a, 12b, 12c и 14a, 14b, 14c управляется гидравлическим поворотным коническим подъемником или силовым приводом 16. Говоря более конкретно, три конических поворотных подъемника 16 связаны с каждой рулевой поверхностью 12 и 14 и являются идентичными друг другу.
На фиг. 2 более подробно представлена конструкция установки трех поворотных подъемников 16, служащих для управления тремя отдельными панелями 12a, 12b и 12c одного из внутренних элевонов 12. Установка конических поворотных подъемников, управляющих отклонениями других элевонов, осуществляется в соответствии с тем же самым принципом и не будет здесь описана специально.
Как показано, в частности, на фиг. 2, три поворотных подъемника 16, обеспечивающих управление поворотным движением элевонов 12, характеризуются симметрией вращения вокруг оси, совпадающей с осью поворота xx' данного элевона. Каждый поворотный подъемник 16 располагается в задней кромке панелей 12a, 12b или 12c соответственно.
Говоря более конкретно, каждый из поворотных подъемников 16 содержит центральную часть, предназначенную для передачи усилий и связанную при помощи шарнира 20 с передним лонжероном 22 и с усиленной средней нервюрой 24 соответствующей панели рулевой поверхности.
В то же время каждый из поворотных подъемников 16 содержит две концевые части, предназначенные для передачи усилий, которые связаны при помощи двух шарниров 26 с задним лонжероном 18 соответствующей несущей поверхности 10.
Каждый из поворотных подъемников 16 запитывается гидравлической жидкостью под давлением от специального гидравлического блока 30. В случае внутренних элевонов 12 эти гидравлические блоки 30 монтируются на упомянутом заднем лонжероне 18 данной несущей поверхности таким образом, чтобы сформировать между этим лонжероном и передней кромкой каждой из панелей упомянутого внутреннего элевона свободное пространство, позволяющее, в частности, обеспечить проход некоторого числа трубопроводов или кабельных линий, соединяющих двигатели, подвешенные на крыле, с фюзеляжем данного самолета.
В случае управляющих или рулевых поверхностей, установленных несколько иначе, например, промежуточных элевонов 14, показанных на фиг. 1, упомянутые гидравлические блоки могут быть смонтированы непосредственно на поворотных силовых приводах или подъемниках 16.
Конструкция одного из упомянутых выше поворотных силовых приводов или подъемников 16 в соответствии с предлагаемым изобретением будет теперь описана более подробно со ссылками на приведенные в приложении фиг. 3 и 4.
Как показано на упомянутых выше фиг. 3 и 4, в представленном варианте практической реализации схематически изображенный поворотный силовой привод или подъемник в соответствии с предлагаемым изобретением содержит внутренний трубчатый корпус 32, образующий ротор, и два наружных корпуса 34, образующих статор, причем упомянутые внутренний и наружные корпуса данного поворотного силового привода или подъемника смонтированы коаксиально.
Говоря более конкретно, внутренний трубчатый корпус поворотного подъемника 32 содержит центральную часть 36, предназначенную для передачи усилий и предусмотренную для того, чтобы находиться в зацеплении с шарниром 20 таким способом, который будет более подробно описан ниже. С одной и с другой стороны от этой центральной части 36, предназначенной для передачи усилий, упомянутый внутренний корпус 32 поворотного подъемника содержит две трубчатых части 38, располагающиеся симметрично по отношению к средней плоскости данного подъемника, совпадающей с плоскостью сечения VI-VI, показанной на фиг. 3.
Оба наружных корпуса 34 данного поворотного подъемника идентичны друг другу, причем каждый из этих наружных корпусов охватывает одну из трубчатых частей 38 внутреннего корпуса 32 таким образом, чтобы сформировать между этой трубчатой частью 38 и соответствующим наружным корпусом 34 герметичное по отношению к внешней среде кольцевое пространство. В непосредственной близости от концов данного поворотного подъемника каждый наружный корпус 34 содержит на своей наружной поверхности концевую часть 62 передачи усилий, предусмотренную для вхождения в зацепление с соответствующим шарниром 26 таким образом, который будет описан ниже более подробно.
Каждая из трубчатых частей 38 внутреннего корпуса 32 имеет на своей наружной поверхности лопатки 40, ориентированные в радиальном направлении наружу по отношению к соответствующей трубчатой части внутреннего корпуса /см. фиг. 5/. Эти лопатки 40 равномерно распределены по периферии упомянутой трубчатой части 38. Таких лопаток может быть, например, четыре, как это показано в представленном на приведенных в приложении фигурах примере практической реализации предлагаемого поворотного подъемника. Кромки лопаток 40, обращенные к соответствующему наружному корпусу 34, оборудованы уплотнительными прокладками 42, обеспечивающими герметичность контакта между этими кромками и внутренними поверхностями упомянутых наружных корпусов.
Аналогичным образом каждый из наружных корпусов данного подъемника 34 имеет на своей внутренней поверхности лопатки 44, ориентированные в радиальном направлении внутрь по отношению к самим этим наружным корпусам. Упомянутые лопатки 44 равномерно распределены относительно продольной оси данного поворотного подъемника и число этих лопаток для каждого наружного корпуса совпадает с числом соответствующих лопаток 40 таким образом, чтобы упомянутые лопатки 40 и 44 располагались чередующимся образом вокруг продольной оси данного поворотного подъемника.
В представленном здесь варианте практической реализации подъемника в соответствии с предлагаемым изобретением каждый из наружных корпусов 34 содержит, таким образом, также четыре лопатки 44. Кромки этих лопаток 44, обращенные в сторону внутреннего корпуса 32, оборудованы уплотнительными прокладками 46, которые находятся в герметизирующем контакте с наружной поверхностью соответствующей трубчатой части 38 внутреннего корпуса данного поворотного подъемника 32.
Вследствие только что описанных особенностей устройства и в соответствии с обычной для поворотных подъемников конфигурации упомянутое выше кольцевое пространство, сформированное между каждым из наружных корпусов 34 и трубчатой частью 38 внутреннего корпуса 32, разделено чередующимися лопатками 40 и 44 на две совокупности камер переменного объема, герметичных друг по отношению к другу и обозначенных позициями 48 и 50 на фиг. 5.
Установка каждого из упомянутых выше наружных корпусов 34 на внутренний корпус 32 данного поворотного подъемника осуществляется таким образом, чтобы был возможен относительный поворот двух этих деталей. Для достижения этой цели конец каждого из наружных корпусов 34 взаимодействует с концами соответствующей трубчатой части 38 внутреннего корпуса 32 при помощи двух подшипников качения 52 и 54, таких, например, как так называемые игольчатые подшипники.
Упомянутый выше гидравлический блок питания 30 /см. фиг. 2/, связанный с каждым из предлагаемых поворотных подъемников 16, подключен к двум наружным корпусам 34 этого подъемника при помощи системы трубопроводов 56. Точнее говоря, первая группа трубопроводов 56 открывается в упомянутые выше камеры 48, тогда как вторая группа этих трубопроводов 56 открывается в упомянутые камеры 50.
Благодаря такому устройству данного подъемника и системы его гидропитания оказывается возможным подавать рабочее давление гидравлической жидкости в камеры 48, открывая при этом в атмосферу камеры 50, или наоборот, таким образом, чтобы иметь возможность управлять вращением внутреннего корпуса 32 данного поворотного подъемника внутри наружных корпусов 34 в одном или в другом направлении.
В соответствии с предлагаемым изобретением величина поперечного сечения по меньшей мере одного из внутреннего 32 и наружных 34 корпусов является эволютивной или изменяющейся таким образом, что лопатки 40 и 44 имеют высоту, уменьшающуюся от одного до другого конца этих лопаток.
В варианте реализации поворотного подъемника в соответствии с предлагаемым изобретением, проиллюстрированном в качестве примера на приведенных в приложении фигурах, упомянутая характеристика данного привода обеспечивается путем придания трубчатому наружному корпусу 34 постоянного по величине поперечного сечения, то есть придания ему цилиндрической формы, и придания каждой из двух трубчатых частей 38 внутреннего корпуса 32 эволютивного или изменяющегося поперечного сечения.
В примере реализации, схематически представленном на фиг. 3 и 4, эволютивное сечение каждой из трубчатых частей 38 внутреннего корпуса 32 обеспечивается формированием в каждой из упомянутых частей 38 конической части 38a, диаметр которой постепенно уменьшается начиная от средней части 36 этого внутреннего корпуса, предназначенной для передачи усилий, и цилиндрической части 38b, продолжающей конец относительно меньшего диаметра упомянутой конической части 38a вплоть до соответствующего конца собственно поворотного подъемника 16.
Как уже было указано выше, именно такая форма элементов поворотного подъемника в соответствии с предлагаемым изобретением приведена здесь только в качестве примера и образующая каждой из упомянутых трубчатых частей 38 внутреннего корпуса подъемника может иметь различные формы, например, она может быть прямой или искривленной.
В представленной в качестве примера реализации данного подъемника конфигурации конец относительного большого диаметра упомянутой конической части 38a каждой из трубчатых частей 38 внутреннего корпуса имеет наружный диаметр, равный внутреннему диаметру наружного корпуса 34, в который входит данная трубчатая часть 38 этого внутреннего корпуса. Каждая из лопаток 40 и 44 имеет приблизительно треугольную форму. Достаточно простой расчет дает возможность показать, что для одной и той же площади активной поверхности лопаток и для поворотного подъемника, имеющего один и тот же наружный диаметр, описанная выше специфическая форма, приданная лопаткам 40 и 44 в поворотном подъемнике в соответствии с предлагаемым изобретением, позволяет на 16,7% увеличить коэффициент полезного действия подъемника по сравнению с цилиндрическими поворотными подъемниками обычной конструкции.
Кроме того, предлагаемая форма внутреннего корпуса 32, образующего ротор данного поворотного подъемника, позволяет уменьшить деформацию кручения, испытываемую этой деталью, в результате линейного увеличения ее диаметра. Эта характеристика делает пренебрежимо малыми деформации кручения внутреннего корпуса 32 по сравнению с деформациями, являющимися следствием подачи рабочего давления гидравлической жидкости в камеры 48 или 50.
Для того чтобы обеспечить возможность монтажа и демонтажа соответственно каждого из наружных корпусов 34 данного поворотного подъемника 16, упомянутый внутренний трубчатый корпус 32 продолжается на каждом из своих концов резьбовой частью 39 /см. фиг. 4/, на которую навинчивается стопорящая гайка 56. Между упомянутой стопорящей гайкой 56 и наружной поверхностью наружного корпуса с соответствующей стороны данного поворотного подъемника устанавливается упорный подшипник качения 58 таким образом, чтобы обеспечить возможность блокировки всякого поступательного перемещения внутреннего корпуса 32 внутри наружных корпусов 34, не препятствуя при этом вращательному движению этого внутреннего корпуса. Полый винт 60 завинчивается в каждый из упомянутых концов внутреннего корпуса 32 поворотного подъемника таким образом, чтобы заблокировать соответствующую гайку 56.
Каждая концевая часть 62 наружных корпусов данного поворотного подъемника, предназначенная для передачи усилий, находится в зацеплении с одним из шарниров 26 в соответствии с конструкцией, которая теперь будет более подробно описана со ссылками на фиг. 5.
Каждый из упомянутых выше шарниров 26 установлен на заднем лонжероне 18 соответствующей несущей поверхности 10 таким образом, чтобы иметь возможность поворачиваться вокруг некоторой оси yy', перпендикулярной упомянутому заднему лонжерону 18 и проходящей через ось шарнирного соединения xx' соответствующей панели рулевой поверхности с несущей поверхностью, например, панели 12a, как это показано на фиг. 5.
Для достижения этой цели каждый из упомянутых шарниров 26 содержит плоскую поверхность 64, которая упирается в заднюю поверхность упомянутого заднего лонжерона 18 посредством упорного игольчатого подшипника 68. Цилиндрическая часть 70 шарнира 26 выступает относительно плоской поверхности 64 по оси yy', проходя через круглое отверстие, выполненное в стенке заднего лонжерона 18. На передней поверхности этого заднего лонжерона 18 гайка 72 навинчивается на резьбовую часть цилиндрической части 70 шарнира таким образом, чтобы взаимодействовать механически с этой передней поверхностью заднего лонжерона 18 через второй игольчатый упорный подшипник качения 74.
В то же время каждый из упомянутых шарниров 26 находится в зубчатом зацеплении с концевой частью 62 соответствующего наружного корпуса 34 данного поворотного подъемника, предназначенной для передачи усилий, посредством специального устройства соединения по вращательному движению вокруг оси шарнирного соединения xx' данной панели 12a рулевой поверхности 12.
В том варианте реализации, который в качестве примера представлен на фиг. 5, это специальное устройство соединения или средства связи упомянутых элементов по вращательному движению образованы канавками или пазами 76, располагающимися по окружности и выполненными на концевых частях передачи усилий 62 наружных корпусов данного подъемника, а также дополняющими их канавками или пазами 77, выполненными в венце 28 шарнира 26, охватывающем упомянутую выше концевую часть наружного корпуса данного поворотного подъемника, предназначенную для передачи усилий.
Здесь следует отметить, что такая конструкция позволяет обеспечить передачу усилий между данным поворотным подъемником и соответствующей несущей поверхностью летательного аппарата в непосредственной близости от панелей обшивки крыла. Это обстоятельство позволяет уменьшить габаритные размеры шарниров 26 между задним лонжероном 18 и собственно поворотным подъемником 16. Освобожденное таким образом место существенно облегчает трассировку трубопроводов и кабельных жгутов, идущих от двигателей самолета в направлении его фюзеляжа.
Кроме того, один из упомянутых шарниров 26 /например, тот из них, который не показан на фиг. 5/ оборудован средствами связи по поступательному движению между этим шарниром и наружным корпусом 34 соответствующей части поворотного подъемника в направлении оси xx' шарнирного соединения панели 12a рулевой поверхности 12 с соответствующей несущей поверхностью. Упомянутые средства связи по поступательному движению могут быть образованы, в частности, фланцами, жестко связанными с данным шарниром и устанавливаемыми по одну и по другую стороны от концов упомянутых выше канавок или пазов 76, которые выступают за наружную поверхность наружного корпуса 34 соответствующей стороны данного поворотного подъемника. Напротив того, другой шарнир 26 является свободным в отношении поступательного движения на конечной части 62, предназначенной для передачи усилий, на соответствующем конце данного поворотного подъемника.
Только что описанная конструкция конического поворотного подъемника и его присоединения к соответствующей несущей поверхности летательного аппарата и к соответствующей панели разрезной управляющей или рулевой поверхности обеспечивает связь по поступательному движению данного поворотного подъемника 16 с задним лонжероном 18 соответствующей несущей поверхности 10, обеспечивая при этом возможность необходимого относительного перемещения при изгибе данной несущей поверхности.
Теперь со ссылками на приведенную в приложении фиг. 6 будет более подробно описан пример практической реализации шарнира 20, связывающего внутренний корпус 32 поворотного подъемника 16 с панелью 12a рулевой поверхности 12.
Как показано на этой фиг. 6, шарнир 20 закреплен на специальной металлической конструкции восприятия передаваемых усилий 78, которая сама в свою очередь закреплена на переднем лонжероне 22 и на средней усиленной нервюре 24 /см. фиг. 2/ соответствующей панели рулевой поверхности/в данном случае это панель 12a/.
Упомянутый шарнир 20 взаимодействует с центральной частью 36 данного поворотного подъемника 16, предназначенной для передачи усилий, при помощи специальных средств связи по вращательному движению. Как и для упомянутых выше шарниров 26, эти средства связи по вращательному движению содержат канавки или пазы 80, располагающиеся по окружности и образованные на наружной поверхности центральной части 36 внутреннего корпуса данного поворотного подъемника, предназначенной для передачи усилий, а также дополняющие их канавки или пазы 81, сформированные на венце 82 упомянутого шарнира 20, охватывающего эту центральную часть 36 упомянутого поворотного подъемника.
Кроме того, специальные средства предусмотрены для того, чтобы обеспечить связь по поступательному движению между упомянутым шарниром 20 и центральной частью 36 данного поворотного подъемника, предназначенной для передачи усилий, вдоль оси поворота xx' упомянутой панели 12a рулевой поверхности 12. Эти средства связи по поступательному движению содержат, например, два фланца 84, жестко связанных с упомянутым шарниром 20 и располагающихся по одну и по другую стороны от концов канавок или пазов 81, а также выступающих на наружную поверхность внутреннего корпуса 32 данного поворотного подъемника.
Как схематически показано на фиг. 2 условной позицией 86, полый характер внутреннего трубчатого корпуса 32 каждого из предлагаемых поворотных гидравлических подъемников 16 позволяет соединить последовательным образом упомянутые внутренние корпуса 32 используемых в данном случае подъемников при помощи трубопровода 86 с контуром кондиционирования или поддержания требуемой температуры данных устройств при помощи жидкотекучего теплоносителя. Таким образом оказывается возможным обеспечить сквозную циркуляцию во внутренних полостях упомянутых поворотных подъемников жидкотекучего теплоносителя, позволяющего, в частности, обеспечить подогрев этих поворотных подъемников управляющих или рулевых поверхностей данного летательного аппарата для облегчения приведения их в действие при слишком низких температурах окружающего воздуха.
Для того чтобы тот или иной отказ любой из трех независимых гидросистем, установленных на данном летательном аппарате, не оказывал влияния на одновременное приведение в действие каждой из трех панелей 12a, 12b и 12c рулевой поверхности 12, по меньшей мере одно соединительное звено 88 в предпочтительном варианте реализации рулевых поверхностей в соответствии с предлагаемым изобретением устанавливается между каждой парой примыкающих друг к другу панелей данной рулевой поверхности приблизительно на середине хорды этих панелей. Упомянутые выше соединительные элементы 88 позволяют, кроме того, исключить возможные вращения каждой из упомянутых выше панелей данной рулевой поверхности вокруг своей центральной усиленной нервюры 24, которые могут возникнуть вследствие приведения в движение этой панели при помощи единственного передающего на нее усилия вращения шарнира 20.
В дополнение к уже упомянутым выше неотъемлемым преимуществам поворотных подъемников в соответствии с предлагаемым изобретением, уже упомянутым выше, применение подъемников этого типа для управления рулевыми или управляющими поверхностями летательных аппаратов способствует проявлению и многих других преимуществ.
Так, установка предлагаемых в соответствии с данным изобретением поворотных силовых приводов или подъемников в передних кромках отклоняемых рулевых поверхностей, обычно остающихся свободными, то есть не занятыми каким бы то ни было технологическим оборудованием, освобождает достаточно большое пространство в обычно весьма загроможденной зоне, располагающейся в непосредственной близости от задней стороны заднего лонжерона соответствующей несущей поверхности.
В то же время передача усилий от упомянутых выше поворотных подъемников к силовой конструкции крыла данного летательного аппарата осуществляется в непосредственной близости от обшивки этого крыла, что существенно уменьшает усилия, передаваемые на основные несущие конструкции этого крыла. Таким образом, появляется возможность выполнить облегчающие выемки в конструкции упомянутого выше шарнира 20 в окрестности его оси симметрии.
Как уже было подчеркнуто выше, поворотный силовой привод или подъемник в соответствии с предлагаемым изобретением может быть использован в многочисленных областях промышленности для тех случаев, когда попеременное поворотное движение исполнительного механизма, приводящего в движение данный орган, должно быть ограничено относительно небольшой амплитудой. В то же время, в зависимости от потребных развиваемых данным поворотным подъемником усилий, он может быть одинарным или сдвоенным, как это было описано выше. Количество лопаток данного поворотного подъемника адаптируется к амплитуде управляемого поворотного движения.
Изобретение относится к механизмам передачи движения и может быть применено для привода рулевой поверхности самолета. Поворотный силовой привод содержит внутренний корпус и, по меньшей мере, один наружный корпус, смонтированные коаксиально один в другом с образованием между ними, по меньшей мере, одного кольцевого пространства. Имеются лопатки, одни из которых жестко связаны с внутренним корпусом, а другие - с наружным корпусом, чередующиеся в кольцевом пространстве для формирования герметичных камер управления переменного объема для управления относительным поворотом между внутренним и наружными корпусами. По меньшей мере один из указанных корпусов выполнен с изменяющимся поперечным сечением. Каждая лопатка выполнена приблизительно треугольной формы с высотой, уменьшающейся от одного конца лопатки к другому ее концу. Рулевая поверхность содержит, по меньшей мере, одну панель, шарнирно связанную с задним лонжероном несущей поверхности, и средства управления поворотным движением панели вокруг оси шарнирного соединения. Последние содержат, по меньшей мере, один описанный выше поворотный силовой привод. Выполнение указанным образом силового привода обеспечит повышение мощности по сравнению с обычным цилиндрическим приводом при тех же габаритных размерах. 2 с. и 14 з.п.ф-лы, 6 ил.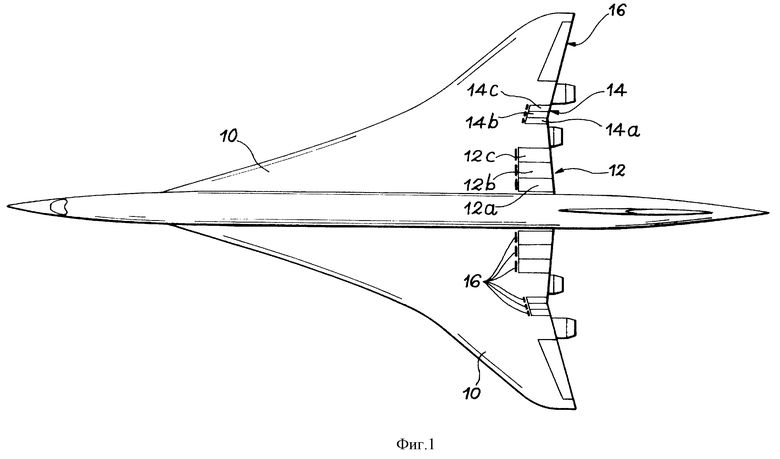
| 0 |
|
SU168090A1 | |
| US 4498647 A, 12.02.1985 | |||
| Моментный сервомеханизм | 1984 |
|
SU1190095A1 |
| US 3628756 A, 21.12.1971 | |||
| СПОСОБ МОБИЛЬНОЙ СВЯЗИ И МОБИЛЬНАЯ СТАНЦИЯ | 2010 |
|
RU2532617C2 |

