Изобретение относится к области построения спутников, стабилизированных по положению их трех геометрических осей на геостационарной орбите, в частности к способу контроля положения по трем осям спутника, обычно геостационарного, стабилизированного по этим трем осям, с возможной компенсацией возмущающих моментов, воздействующих на спутник по осям крена/рысканья во время маневров управления орбитой. Изобретение может быть использовано в гражданской, военной, коммерческой или в научной областях.
Под спутником здесь понимают любой искусственный объект, совершающий эволюции в солнечной системе, этот объект может находиться:
- на орбите Земли или какой-либо другой планеты или какого-либо объекта солнечной системы,
- на орбите Солнца, а в известных случаях, на промежуточной орбите между двумя планетами.
Известно, что при нахождении на орбите спутник подвергается возмущающим моментам, которые приводят к необходимости управления его положением. Наиболее важные причины возмущений следующие:
- диссимметрия относительно центра тяжести (в космическом пространстве скорее следует говорить о центре массы), эффекты давления солнечной радиации (или сокращенно солнечного давления), связанные с углом наклона (разница между 90o и реальным углом падения) оси тангажа спутника относительно Солнца, различия отражательной способности элементов спутника, геометрическая диссимметрия спутника,
- воздействие местного магнитного поля (например, поля Земли),
- расстояние центра тяжести спутника до оси результирующего вектора тяги двигателей, применяемых для изменения орбиты спутника.
Можно также упомянуть:
- возмущения, связанные с влиянием окружающей среды: эффект солнечного давления, взаимодействие магнитного диполя спутника с окружающим магнитным полем, градиент силы тяжести. Эти возмущения являются слабыми, но постоянно воздействующими на спутник (порядок величины 10-5 Нм),
- возмущения, связанные с неточным расположением вектора тяги химических двигателей управления орбитой относительно центра тяжести спутника. Эти возмущения являются более важными, но ограниченными по времени (порядок величины 10 Нмс в день для геостационарного спутника).
Таким образом, необходимо предусматривать средства управления положением спутника на его орбите. Уже предложены для этой цели различные активные средства, в которых используются реактивные колеса или реактивные сопла, но:
- использование принципа эжекции массы приводит к необходимости создания резервной массы, что утяжеляет спутник при его запуске,
- использование реактивных газовых сопел вызывает значительные возмущения, возбуждающие нутацию спутника, а также ухудшающие точность наводки,
- использование сопел малой тяги, таких как ионные движители или сопла с ионизацией за счет электрической дуги, связано со значительным потреблением электрической мощности и вызывает необходимость введения фазы предварительного нагрева, что, как правило, удерживает специалистов от их использования для управления положением,
- использование реактивных колес (маховиков) недостаточно само по себе, так как время от времени они должны притормаживаться (их скорость должна быть приближена к ее номинальной величине), а это притормаживание вызывает необходимость приложения внешнего момента к спутнику.
Таким образом, если желают контролировать положение спутника при оптимальной массе, то следует извлечь выгоду из воздействия возмущающих сил, связанных:
- с солнечным давлением (за счет надлежащей ориентации поверхностей, связанных со спутником),
- или с местным магнитным полем, например, земным (для совмещения с ним магнитных диполей на борту спутника при помощи моментов тока).
Известен спутник [1], содержащий поверхности, предназначенные для восприятия солнечного излучения, средства контроля орбиты, прикладывающие усилия по данным осям, а также систему управления и контроля. Указанный спутник содержит средства управления качанием выносных поверхностей параллельно множеству плоскостей, содержащих заданное направление, управляемые от бортовой системы управления.
Наиболее близким техническим решением для варианта выполнения спутника является конструкция спутника [2]. В данном техническом решении описан спутник, содержащий корпус, детекторы положения, два крыла солнечного генератора, простирающиеся параллельно оси тангажа, устройство вращения крыльев солнечной батареи, связанное с системой управления. При этом крылья солнечного генератора отслеживают ориентацию направления на Солнце. Кроме того, спутник содержит систему ориентации и стабилизации, а также систему тяги для управления положением и корректировки орбиты.
Из заявки Франции [2] известен способ ориентации спутника, выбранный в качестве прототипа.
Решения, заявленные в этих патентах, связаны с большой массой, не очень высокой надежностью при маневрах контроля орбиты, большими возмущениями при управлении положением, небольшими запасами для двигателей привода крыльев солнечного генератора.
В основу изобретения положена задача ликвидации этих недостатков.
Эта задача решается тем, что согласно изобретению поверхность спутника проходит от корпуса параллельно оси тангажа, а средства управления качанием вместе с упомянутой поверхностью представляют собой исполнительные органы активных средств контроля углового положения.
Желательно, чтобы средства управления качанием содержали двигатель вращательного типа с осью, наклоненной под углом, отличным от нуля (α), относительно заданного направления.
Желательно, чтобы угол α находился в пределах 2 - 15o.
Желательно, чтобы средства управления качанием содержали двигатель управления поворотом вокруг оси, поперечной заданному направлению.
Желательно, чтобы двигатель был выполнен с возможностью наибольшего биения, равного 15o относительно заданного направления.
Желательно, чтобы средства управления качанием содержали второй двигатель управления поворотом вокруг оси, поперечной заданному направлению, имеющий отличный от нуля наклон относительно оси первого двигателя.
Желательно, чтобы средства управления качанием содержали линейный двигатель с осью действия в направлении, наклоненном относительно заданного направления и установленный на одной из сторон деформируемого шарнирного треугольника, соединяющего указанную поверхность со спутником.
Согласно другому варианту двигательная установка коррекции орбиты является чисто электрической и содержит первую пару электрических ракетных двигателей, расположенных симметрично относительно плоскости осей тангажа и рысканья и наклоненных под углами, отличными от нуля, к плоскости осей крена и рысканья и к плоскости осей тангажа и рысканья и под углами менее 20o к плоскости осей крена и тангажа, средства управления положением содержат между корпусом и крылом солнечной батареи устройство привода качания этого крыла, выполненное с возможностью осуществления привода качания этого крыла поперечно солнечному излучению и управления бортовым компьютером с возможностью при взаимодействии с солнечным излучением создавать моменты управления положением по тангажу.
Желательно, чтобы электрические ракетные двигатели первой пары были расположены у одного из торцов Север и Юг.
Желательно, чтобы электрические ракетные двигатели первой пары были расположены по кромкам, ограничивающим эту сторону, параллельно оси рысканья.
Желательно, чтобы электрические ракетные двигатели были расположены главным образом посередине этих кромок.
Желательно, чтобы двигательная установка коррекции орбиты содержала вторую пару электрических ракетных двигателей, расположенных симметрично по отношению к плоскости осей тангажа и рысканья с углом наклона, отличным от нуля, относительно плоскости крена и рысканья, но в направлении, противоположном направлению ракетных двигателей первой пары, с углами наклона, отличными от нуля относительно плоскости, проходящей через оси рысканья и тангажа, и углами наклона, самое большее, равными 20o относительно плоскости, проходящей через оси крена и тангажа.
Желательно, чтобы первая и вторая пары электрических ракетных двигателей были расположены симметрично относительно плоскости осей крена и рысканья.
Желательно, чтобы каждый электрический ракетный двигатель имел наклон к оси крена, абсолютная величина которого составляет 40 - 75o, и наклон к оси тангажа, абсолютная величина которого 15 - 65o.
Желательно, чтобы было второе крыло солнечной батареи, простирающееся параллельно оси тангажа (Y) в противоположном относительно первого крыла направлении и соединенное с корпусом при помощи второго устройства управления вращением вокруг оси тангажа, управляемого бортовым компьютером таким образом, что это второе крыло остается перпендикулярным к солнечному излучению, и при помощи второго устройства управления качанием второго крыла параллельно множеству плоскостей, содержащих ось тангажа, причем устройства управления качанием крыльев выполнены с возможностью совместного управления при помощи бортового компьютера.
Желательно, чтобы определенные электрические ракетные двигатели были ионными движителями.
Желательно, чтобы определенные, по меньшей мере некоторые из электрических ракетных двигателей, являлись плазменными ракетными двигателями.
Желательно, чтобы была система для управления положением в фазе выведения на рабочую орбиту, которая связана с той же емкостью однокомпонентного топлива, что и электрические ракетные двигатели.
Желательно, чтобы этот спутник содержал систему создания тяги и управления положением на двухкомпонентном ракетном топливе, используемую в фазе выведения на рабочую орбиту.
Поставленная задача решается благодаря способу, согласно которому качают выносную поверхность в поперечном относительно солнечного излучения направлении, создавая момент тангажа, равный требуемому моменту коррекции положения спутника по тангажу.
Желательно, чтобы качали указанную выносную поверхность с составляющей качания, параллельной плоскости, проходящей через заданное направление, в котором простирается эта поверхность и направление смещения центра масс спутника от оси действия тяги, возникающего в результате действия соответствующего маневра коррекции орбиты, причем указанной составляющей качания обеспечивают приближение центра масс спутника к оси действия тяги.
Желательно, чтобы при каждом маневре коррекции орбиты стабилизировали положение спутника путем воздействия на систему с ориентируемым кинетическим моментом, а затем перед следующим маневром контроля орбиты качали указанную выносную поверхность параллельно солнечному излучению, стабилизируя спутник по тангажу и приводя ориентируемый кинетический момент к заданному направлению ориентации относительно спутника.
Желательно, чтобы тягу коррекции орбиты прикладывали параллельно плоскости крен-тангаж посредством включения электрических ракетных двигателей.
Предлагаемое изобретение обеспечивает следующие преимущества:
- управление по тангажу достигается без изменения (или с минимальным изменением) состояния по крену/рысканью спутника, что позволяет объединить с этим управлением по тангажу любой известный вид управления по крену/рысканью. В частности, особенно следует указать на управление солнечным давлением, при котором используются приводные двигатели крыльев (см. заявки на французские патенты 89-15732 от 29 ноября 1989 г. и 89-17479 от 29 декабря 1989 г.),
- боковое перемещение солнечных батарей вызывает перемещение центра тяжести спутника, позволяющее установить по направлению тяги двигатели Север, Юг, Восток и Запад управления орбитой. Это в значительной степени позволяет уменьшить возмущения крен/рысканье, наводимые при маневрах контроля орбиты Север-Юг, и возмущения по тангажу при маневрах Восток-Запад,
- дополнительная масса этих исполнительных устройств компенсируется экономией топлива, получаемой благодаря отказу от любой эжекции материала для управления положением (по меньшей мере, по тангажу) и благодаря минимизации возмущений по крену/рысканью при маневрах контроля орбиты,
- дополнительные средства приведения в движение (исполнительные устройства) могут быть использованы как дополнительные к классическим двигателям приведения во вращение крыльев солнечного генератора в том случае, когда выбирают такое построение, в котором слегка наклоненный осевой мотор имеет наложенный на него приводной двигатель, эта избыточность (дополнительность) представляет собой дополнительный козырь по сравнению с классическими решениями, в которых приводные двигатели выходят из строя при единственной аварии,
- использование такой концепции позволяет построить спутник, в котором использование сопел с газовым потоком во время жизни на орбите заменено, например, использованием электрических сопел (ионных, с ионизацией за счет электрической дуги или плазменных), предназначенных только для контроля орбиты. Подобная концепция является преимущественной, так как повышается точность нацеливания при отсутствии возмущений, возникающих из-за газовых потоков сопел; возникает выигрыш в массе топлива в результате использования электрических сопел с лучшими удельными импульсами по сравнению с газовыми соплами.
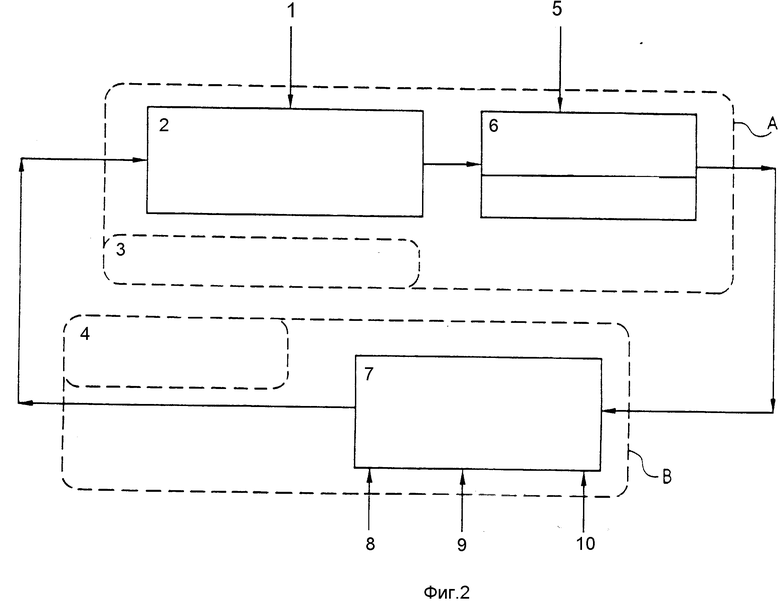
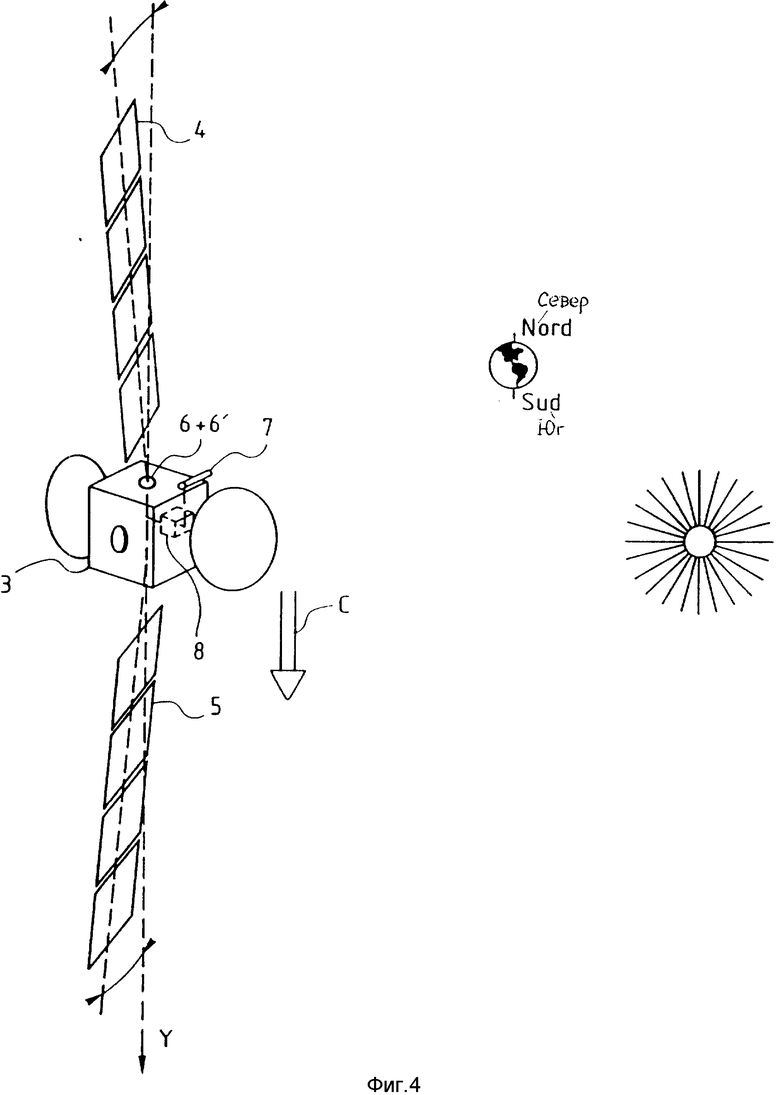
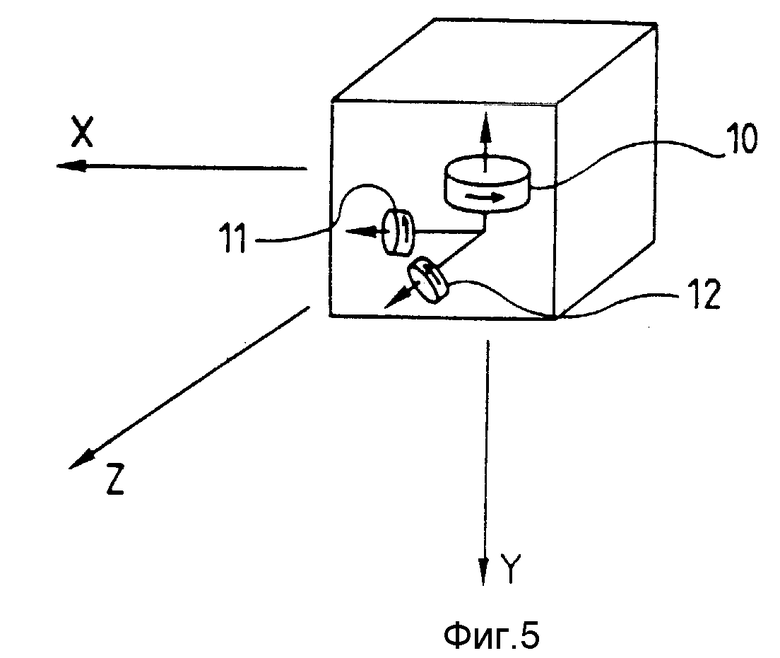
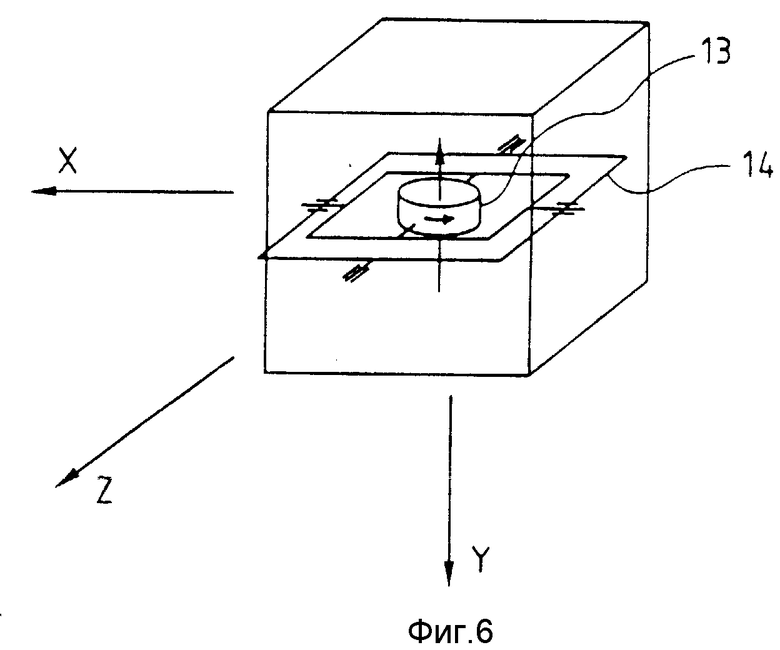
На фиг. 1 изображен схематичный вид спутника в пространстве, стабилизированного по трем своим осям и описывающего орбиту вокруг Земли; на фиг. 2 - структурная схема логики управления положением спутника в соответствии с изобретением, в которой в качестве примера интегрируется управление по осям крен/рысканье и использование кинетического момента с регулируемыми тремя его составляющими (обозначения на фиг. 2: 1 - оценка положения центра тяжести при предыдущей тяги; 2 - ориентация крыльев таким образом, чтобы установить центр тяжести спутника по направлению действия тяги двигателей контроля орбиты; 3 - режим контроля орбиты; 4 - режим притормаживания реактивных колес и удержания положения; 5 - измерение положения; 6 - контроль трех осей за счет изменения скорости реактивных колес, тяга для контроля орбиты; 7 - ориентация крыльев таким образом, чтобы управлять спутником по трем осям и притормаживать реактивные колеса; 8 - измерение положения; 9 - измерение отклонения скорости реактивных колес; 10 -оценка возмущающих моментов); на фиг. 3 - структурная схема с элементами, которые применяются при осуществлении логики контроля фиг. 2; на фиг. 4 - схематичный вид в перспективе спутника, на котором солнечное давление генерирует (создает) момент тангажа, ориентированный по оси Y спутника; на фиг. 5 - 7 - три известных вида расположения реактивных колес, приспособленных для осуществления логики фиг.2 и генерирующих кинетический момент, три компоненты которого являются регулируемыми; на фиг. 8 - детальный вид управления движением солнечной батареи спутника в соответствии с изобретением, в котором используется двигатель, вращающий ось, слабо наклоненную относительно приводного двигателя вращения панели; на фиг. 9 - вариант предыдущего решения, в котором используется управляющий двигатель, поворачивающий ось, поперечную оси приводного двигателя; на фиг. 10 - другой вариант, в котором используется деформируемый шарнирный треугольник для осуществления связи солнечной батареи с приводным двигателем; на фиг. 11 - вид идеальной конфигурации идеального спутника при маневре контроля орбиты; на фиг. 12 - реальная конфигурация реального спутника; на фиг. 13 - реальная конфигурация, улучшенная благодаря применению изобретения; на фиг. 14 - вид в перспективе с большим увеличением корпуса спутника, показанного на фиг.1 и 4; на фиг. 15 - вид в перспективе по стрелке XIY фиг. 14; на фиг. 16 - схема контура питания топливом ракетных двигателей; на фиг. 17 - структурная схема управления спутника, показанного на фиг. 14 и 15.
Спутник (фиг. 1) 1 описывает круговую орбиту 2 вокруг Земли, например типа геостационарной с максимальным наклоном 5o например 0,5o. Этот спутник содержит центральное тело 3, с которым объединены три оси спутника:
- ось X, касательная к орбите 2 и имеющая такое же направление, что и скорость пробега орбиты: классически она называется ось крена,
- ось Y, перпендикулярная плоскости орбиты 2 и ориентированная в направлении Север-Юг Земли: она классически называется осью тангажа,
- ось Z, перпендикулярная осям X и Y и ориентированная к Земле: классически она называется осью рысканья.
На определенных спутниках эта система осей может быть ориентирована по-другому относительно орбиты и/или Земли в функции императивов, связанных с осуществляемой спутником миссией.
Этот спутник содержит устройство управления положением, благодаря которому он стабилизируется вокруг своих трех осей.
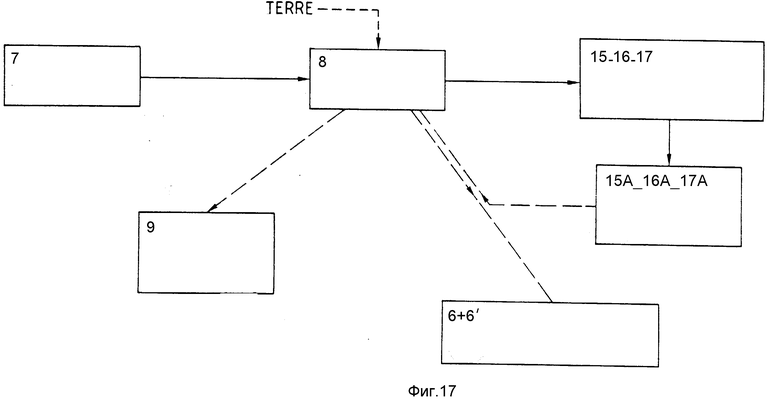
Он содержит также устройство измерения положения (классическое само по себе), связанное со схемой обработки (также являющейся классической), позволяющей рассчитывать коррекции, которые следует ввести в устройство управления положением. Это устройство классическим образом включает в себя (см. фиг. 4) земной детектор 7 (например, инфракрасного типа), наиболее часто приспособленный для измерения положения по крену и тангажу. Оно может также включать в себя солнечные или звездные детекторы (не изображены) для необходимых измерений, особенно по положению рысканья. Схема обработки на практике представляет собой часть бортового компьютера 8, схематически показанного на фиг. 4.
Также этот спутник содержит солнечный генератор, имеющий два крыла 4 и 5, простирающихся соответственно к Северу и Югу по своим продольным осям, здесь совпадающим с осью Y и ориентируемых относительно корпуса 3 вокруг оси вращения, по меньшей мере приблизительно совпадающей с осью Y, под действием двух приводных двигателей, управляемых раздельно, любого известного подходящего типа, один из которых расположен на стороне Север и обозначен позицией 6 в совокупности 6 + 6'(см. фиг. 4); эти двигатели нормально предназначены для удержания крыльев главным образом в направлении на Солнце перпендикулярно его лучам.
На определенных спутниках солнечный генератор может быть образован только одним крылом, расположенным на стороне Север или Юг. В этом случае спутник может также содержать солнечный парус на противоположной стороне (ориентируемый или симметричный относительно оси, параллельной Y), ролью которого является уравновешивание спутника с точки зрения положения центра тяжести и положения центра среднего давления солнечной радиации. Этот тип конфигурации также может использовать настоящее изобретение. Также может быть и более двух крыльев или парусов, параллельных оси тангажа.
В тексте под термином "солнечный генератор" обозначают совокупность одного или двух (даже больше) крыльев с уточнением, что термин "крыло солнечного генератора" обозначает совокупность, которая может быть ориентирована при помощи приводного двигателя, т.е. совокупности образованы из:
- собственно солнечного генератора, т.е. совокупности ячеек, преобразующих световую (лучистую) энергию в электрическую энергию, например, за счет фотоэлектрического эффекта,
- структуры, которая является несущей для этих элементов,
- механизмов, связанных с этой структурой, которые позволяют ее удерживать в закрытом состоянии до того момента, пока спутник не достигнет своего орбитального положения, и ее раскрывать и удерживать в раскрытом состоянии,
- из всех дополнительных элементов, которые в орбитальной конфигурации закреплены на этой структуре и имеют различные функции. Можно, например, указать на створки термической защиты, которые позволяют ограничить термические потери спутника во время фаз, когда солнечный генератор не раскрыт, или же поверхности, которые позволяют улучшить световой поток, полученный фотовольтаическими элементами (например, экраны создания равномерного затенения).
В определенных случаях раскрывающиеся радиаторы, которыми может быть оборудован спутник, могут быть использованы в качестве поверхностей, воспринимающих солнечное давление.
На практике спутник несет также различные дополнительные элементы (такие как антенны), закрепленные или практически зафиксированные, облучение которых Солнцем вызывает возмущающие моменты, добавляющиеся к тем, которые вызываются возможной диссимметрией солнечного генератора. Например, телекоммуникационные спутники содержат, как правило, одну или несколько передающих антенн: давление излучения передаваемого пучка вызывает возмущающий момент вокруг оси Y, который добавляется к ранее указанным.
Также классический спутник содержит двигатели контроля орбиты, например, химические (поз. 9 на фиг. 3), которые приводят через регулярные интервалы спутник в его нормальное положение в космическом пространстве. Это устройство является необходимым из-за эволюций, которые имеет любой объект на орбите, а именно удаление от своей исходной орбиты под действием различных возмущений (особенно для геостационарных спутников притяжение Луны и Солнца вызывает нежелательный наклон орбиты, в то время как анизотропия земной сферы вызывает девиацию к Востоку или Западу видимого положения спутника относительно Земли). Во всех случаях эта система становится необходимой для изменения орбиты спутника, когда это требуется по задачам миссии, или же когда в конце жизни спутника его требуется перевести на орбиту уничтожения.
В соответствии с другим аспектом изобретения, эта система содержит электрические двигатели.
Спутник 1 снабжен средством управления положением по тангажу, которое совместимо с любым другим известным средством контроля спутника по осям рысканья и крена, особенно солнечным. Это управление по тангажу является развязанным относительно устройств управления положением по крену/рысканью.
Кроме того, в изобретении соблюдается правило, которое заключается в том, чтобы добавлять как можно меньше (а лучше - совсем не добавлять) элементов к спутнику.
Изобретение позволяет обеспечить благодаря давлению солнечной радиации контроль спутника по трем его осям.
Как ясно из рассмотрения фиг. 4, момент управления по тангажу получают за счет управляемого качания в направлении, поперечном солнечному излучению, по меньшей мере одного из двух крыльев солнечного генератора (и/или солнечного паруса уравновешивания, если спутник имеет только одно крыло). Это качание вызывает перемещение центра солнечного давления относительно оси тангажа Y и, следовательно, создает момент тангажа.
При маневрах контроля орбиты это качание может быть также использовано для перемещения центра тяжести крыльев и, следовательно, центра тяжести спутника в своей совокупности. Центр тяжести спутника может быть в таком случае приведен по желанию, если это необходимо, на ось вектора тяги двигателя 3 контроля Север-Юг, а значит и Восток-Запад, что позволяет минимизировать (и даже аннулировать) возмущения крена и рысканья, возникающие при контроле орбиты (см. описание фиг. 11 - 13). На практике эти возмущающие моменты не всегда полностью аннулируются, но по меньшей мере значительно уменьшаются, что позволяет возложить управление положением по осям крен/рысканье во время этих маневров на дополнительное устройство 9', такое как реактивное колесо, являющееся менее мощным и менее дорогостоящим, чем инерционное колесо, и которое вызывает меньшие нутации спутника, следовательно, точность нацеливания может быть улучшена.
Команда на управление положением центра тяжести может быть подана при идентификации (либо автоматически, либо при анализе на Земле) возмущений, зарегистрированных в ходе предыдущих маневров. Во время этих маневров создаваемый солнечным давлением момент тангажа является, очевидно, пренебрежимым относительно возмущающих моментов, вызванных маневрами корректировки орбиты, и относительно воздействия исполнительных устройств, призванных их скомпенсировать; таким образом, контроль тангажа за счет качания становится не эффективным, так же как и перемещение центра тяжести к оси вектора тяги, и может в определенных случаях вместо корректировки положения по тангажу создавать дополнительные возмущающие моменты. Таким образом, должно быть использовано другое средство управления по тангажу, например, за счет использования изменения скорости одного из реактивных колес при ожидании следующего маневра контроля орбиты.
Это представлено на фиг.2, на которой показаны два чередующихся режима.
В режиме контроля орбиты (рамка А) перемещают центр тяжести из его положения, найденного при предыдущем маневре, к оси вектора тяги двигателей орбиты. Затем, производя измерения положения в данный момент, воздействуют на систему с управляемым кинетическим моментом 9' (см. фиг.3) в то время, когда еще приложена тяга контроля орбиты.
На фиг. 5 - 7 представлены различные известные системы с управляемыми кинетическими моментами, приспособленные для создания системы 9': они содержат либо кинетическое колесо 10 по тангажу и два реактивных колеса 11 и 12 по двум осям в плоскости крен/рысканье, либо одно кинетическое колесо 13 по тангажу, установленное в двухстепенном подвесе (поз. 14 в своей совокупности), либо три реактивных колеса 15, 16 и 17, ориентированных по оси тангажа и по двум осям плоскости крен/рысканье. Естественно оси, выбранные в плоскости крен/рысканье, могут быть осями крена и рысканья. Этот последний вариант не обеспечивает никакой гироскопической жесткости.
В режиме управления положением (рамка В), кроме измерений положения, оценки возмущающих моментов и измерений кинетического момента для компенсации последствий предыдущего маневра контроля орбиты, управляют качанием собственно крыльев для поддержания положения спутника и притормаживания колес.
Реализация контроля согласно фиг.2 для определения амплитуды качаний, которую следует приложить к крыльям, не представляет труда для специалистов.
На фиг. 3 схематично показаны элементы, необходимые для осуществления этого контроля: бортовой компьютер 8, воздействующий на приводные двигатели 6, двигатель (или двигатели) качания 6', система с ориентируемым управляемым кинетическим моментом 9' и двигатели контроля орбиты 9, работающие в функции различных сигналов, поступающих от детекторов положения (показан детектор 7) системы с ориентируемым кинетическим моментом 9' и даже поступающих от других элементов спутника или посылаемых с Земли.
В предыдущем изложении учитывают положение как по тангажу, так и по крену и рысканью.
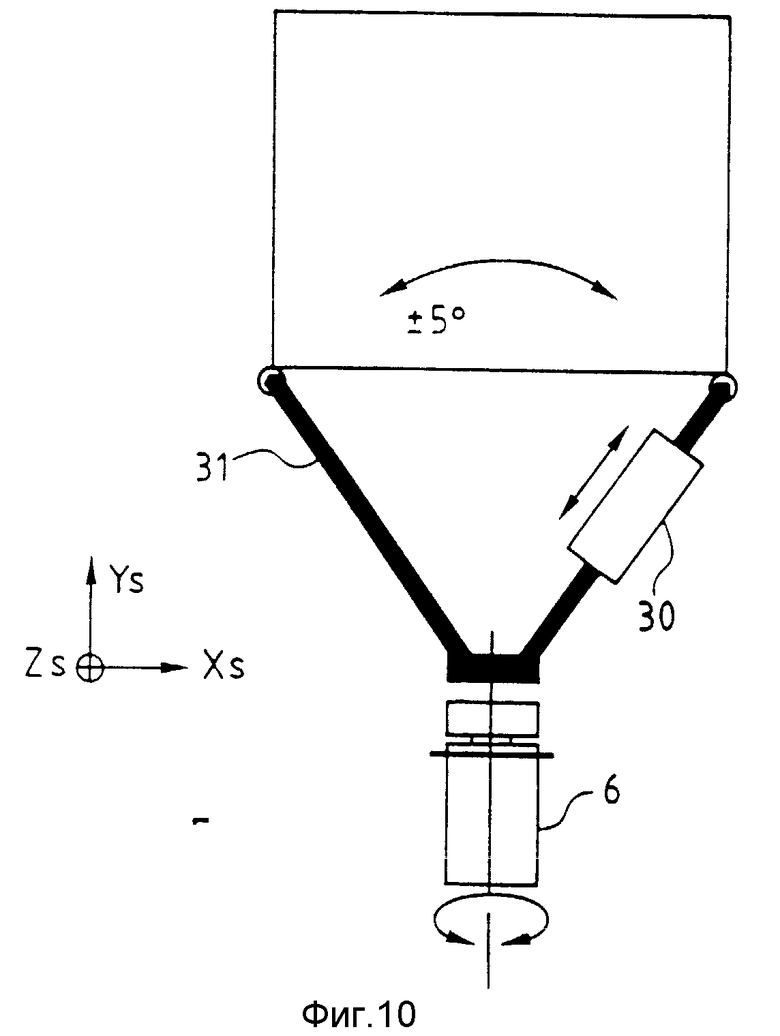
Качание крыла (или паруса) параллельно своей плоскости может быть получено (среди других возможных решений) при помощи двигателя 6, показанного на фиг. 8 - 10,
- либо двигателя 20 ориентации оси, перпендикулярной плоскости батарей (панелей), этот двигатель добавляется между двигателем 6 классического привода крыльев и рычагом удаления 21 указанных панелей (см. фиг.8), угловое биение в таком случае составляет, например, ±5 в одну и другую сторону от оси двигателя 6. Позицией 22 показан отрезок кабеля подведения мощности от солнечного генератора,
- либо двигателя линейного перемещения 30 (например, типа "бесконечный шариковый винт и рейка"), установленного на одной или нескольких стойках рычага удаления 31 солнечного генератора (см. фиг.9), в таком случае рычаг является деформируемым,
- либо, и это является предпочтительным решением, при помощи присоединения второго двигателя 40, в случае необходимости, аналогичного двигателю привода крыла. Этот двигатель имеет ось, слегка наклоненную (угол α, например, близок 5o) относительно оси приводного двигателя (см. фиг. 8). В таком случае качание крыла (рычаг удаления которого частично показан поз. 41) достигается совместным вращением двух двигателей, при этом продольная ось крыла описывает конус вокруг оси вращения двигателя 6 привода крыла, оставаясь главным образом обращенной к заданному направлению.
Это последнее решение имеет многочисленные преимущества, в частности:
- оно позволяет при единственном дополнительном двигателе осуществлять перемещение центра тяжести по любому направлению в плоскости, параллельной плоскости X/Z, что позволяет не только устанавливать центр тяжести по оси Север-Юг, в случае маневров Север-Юг контроля орбиты, но и, кроме этого, осуществлять приближение центра тяжести к оси Восток-Запад при маневрах Восток-Запад контроля орбиты,
- оно хорошо вписывается в габариты спутника, облегчая установку солнечного генератора, который не должен быть слишком поднят для создания места для размещения дополнительных механизмов,
- в случае поломки одного из классических двигателей привода солнечного генератора такое решение обеспечивает избыточность (резерв) благодаря добавке этого двигателя со слегка наклоненной осью. В этом случае (при аварии) эффективность управления по тангажу и установке положения центра тяжести уменьшается вдвое. Однако нет тяжелых последствий, связанных с потерей одного из приводных двигателей, присущих традиционным спутникам.
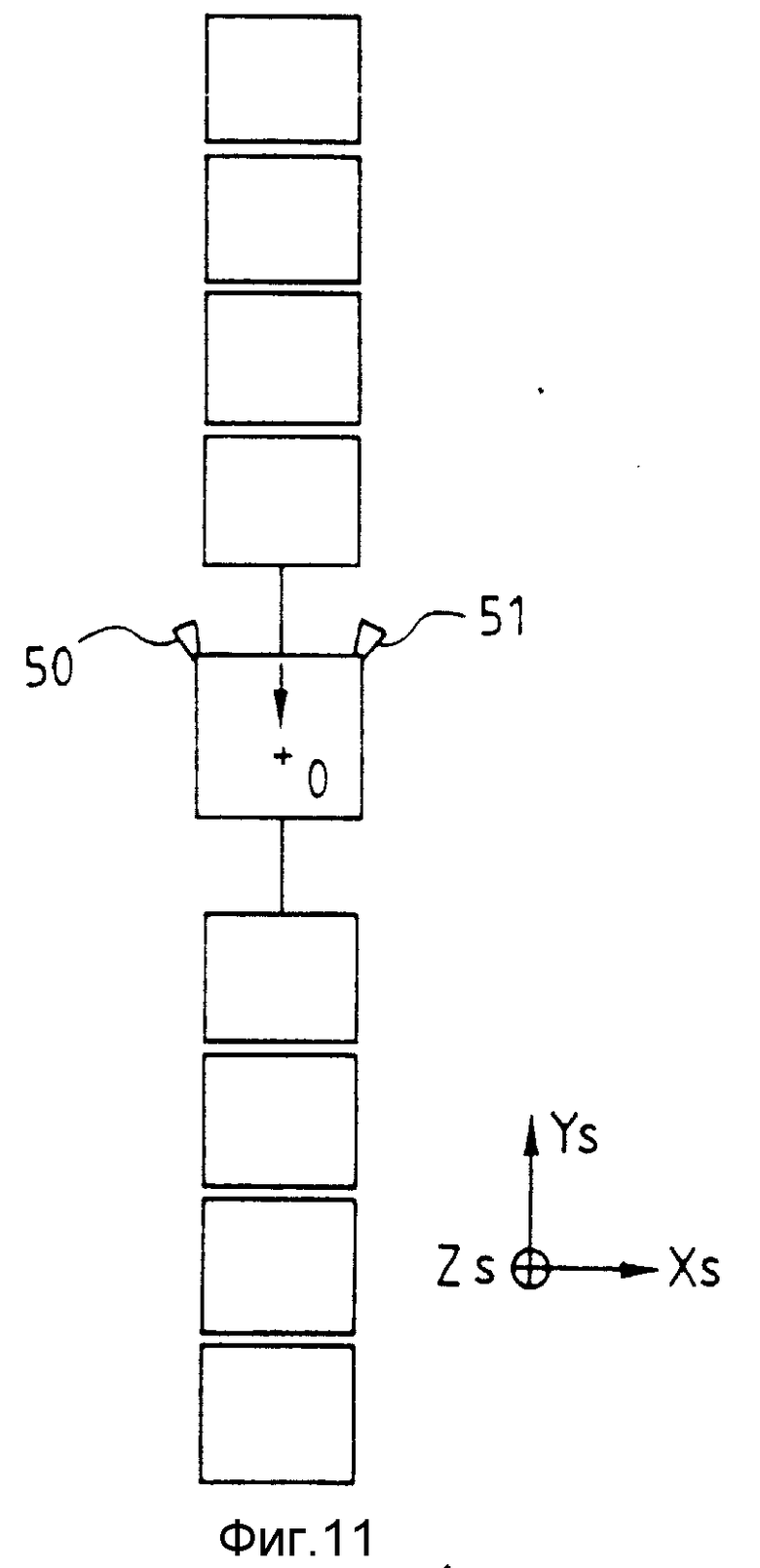
Оси Xs, Ys и Zx образуют систему осей, связанную со спутником.
На фиг. 11 показан идеальный случай, когда центр тяжести O находится точно в желаемом положении и ось вектора тяги двигателей тяги Север-Юг 50 и 51 проходит через это желаемое положение. В этом идеальном случае маневры контроля орбиты Север-Юг не наводят никакого возмущающего момента.
В действительности центр тяжести O' смещен относительно своего желательного положения, в то время как ось вектора тяги двигателей 50 и 51 не проходит точно через это желаемое положение (фиг. 12). Для минимизации возмущающих моментов в изобретении предлагается перемещать реальный центр тяжести к оси тяги (положение O'' на фиг. 13).
Таким образом, на спутнике, соответствующем изобретению, становится возможным отказаться от традиционных сопел с потоками газа:
- для контроля только ориентации при отсутствии маневров контроля орбиты,
- равным образом, во время маневров контроля орбиты, так как уменьшение возмущений позволяет осуществлять контроль при помощи менее мощных средств, например при помощи кинетических или реактивных колес. Накопленный в этих колесах кинетический момент может быть затем легко погашен при помощи момента сил солнечного давления, воздействующего снаружи при маневрах контроля орбиты.
Следует отметить, что:
- качание одного или нескольких крыльев солнечного генератора (или паруса, противоположного солнечному генератору, если генератор асимметричен) может быть использовано либо для создания момента контроля по тангажу за счет эффекта давления солнечной радиации на крылья солнечного генератора (или на солнечный парус), либо во время маневров контроля орбиты для установки положения центра тяжести спутника таким образом, чтобы минимизировать возмущения, связанные с удалениями, которые существуют между этим центром тяжести и реальным вектором тяги двигателей контроля орбиты, причем эти два использования могут применяться изолированно или совместно на одном и том же спутнике,
- качание, полученное при помощи известных исполнительных устройств любого типа, допускает использование солнечного давления на крылья солнечного генератора для контроля по крену и рысканью при помощи любого известного способа,
- качание (до ±15o) может быть получено в двух направлениях плоскости крен/рысканье, если выбирают исполнительное устройство, обеспечивающее вращение слегка наклоненной оси относительно оси приводного двигателя крыльев солнечного генератора (качание достигается дифференциальным вращением двух двигателей: собственно приводного двигателя и дополнительного двигателя),
- угол, образованный между осями двух двигателей, составляет 2 - 15oC
- предусматривается использование второго двигателя в качестве резервного двигателя привода крыла в случае его поломки,
- качание (до ±15o) может быть обеспечено в одном направлении при помощи исполнительного устройства с поступательным перемещением, расположенного на одной или нескольких стойках рычага удаления крыла солнечного генератора,
- качание по одному направлению может быть также получено при помощи исполнительного устройства с вращением оси, по меньшей мере приблизительно перпендикулярной плоскости крыльев солнечного генератора,
- в непредставленном варианте исполнения качание может быть получено в двух направлениях при помощи двух исполнительных устройств с вращением двух различных осей, по меньшей мере, приблизительно перпендикулярных оси приводного двигателя крыльев солнечного генератора,
- контроль положения по одной из осей крена, тангажа и рысканья осуществляется полностью или частично при помощи системы с использованием воздействия солнечного давления на связанные со спутником поверхности,
- в непоказанном варианте исполнения, контроль положения одной из осей крена, тангажа и рысканья осуществляется полностью или частично при помощи системы, использующей имеющийся на борту магнитный диполь,
- управление положением по одной из осей крена, тангажа и рысканья осуществляется полностью или частично при помощи системы, использующей изменение одного из компонентов собственного кинетического момента,
- управление положением во время маневра контроля орбиты обеспечивается изменением трех компонентов собственного кинетического момента и за счет достигаемой при применении изобретения минимизации получаемых возмущений,
- управление положением вне маневров контроля орбиты осуществляется при помощи солнечного давления с помощью в случае необходимости (этот вариант не рассматривался) магнитных диполей,
- в соответствии с другим непредставленным вариантом, управление положением при отсутствии маневров контроля орбиты обеспечивается магнитными диполями (в случае необходимости, при помощи солнечного давления),
- управление положением при отсутствии маневров контроля орбиты используется для приближения к заданным величинам компонентов собственного кинетического момента,
- спутник является геостационарным,
- полностью или частично двигатели контроля орбиты имеют малую тягу (меньше 1 Н),
- полностью или частично двигатели контроля орбиты являются ионными двигателями,
- полностью или частично двигатели контроля орбиты являются двигателями с ионизацией за счет электрической дуги,
- полностью или частично исполнительными устройствами контроля орбиты являются ориентируемые поверхности, на которые воздействует солнечное давление.
Дальнейшее изложение, приведенное со ссылками на фиг. 14 - 17, касается случая, когда двигательная установка для контроля орбиты и положения в своей операционной фазе не использует химического ракетного двигателя. Следовательно, эта система не имеет присущих наличию таких химических двигателей недостатков (риск утечки, резкие изменения положения и/или возможная генерация вибраций). Напротив, в таком случае можно использовать преимущества, связанные с высокими удельными импульсами электрических движителей (в 5 - 10 раз большими, чему классических химических).
В своем минимальном составе эта система электрической тяги, обозначенная в своей совокупности поз. 60, образована только из двух ракетных двигателей 61 и 62 (или 63 и 64), расположенных преимущественно симметрично относительно плоскости осей Y и Z, с наклоном α1 около 40o относительно оси тангажа. Как правило, угол α1 составляет 15 - 65o и абсолютной величины (т.е. его косинус по абсолютной величине 0,43 - 0,97), в то время как косинус угла наклона этих двигателей относительно оси крена α2 по абсолютной величине между 0,25 - 0,75 (угол по абсолютной величине 40 - 75o).
Предпочтительно эти двигатели перпендикулярны оси рысканья. Однако трудности с расположением этих двигателей могут заставить устанавливать их с наклоном α3 относительно оси рысканья, косинус которого -0,35 - 0,35 (угол 70 - 110o).
Предпочтительным образом эти двигатели расположены по кромкам корпуса спутника, ограничивающим одну и ту же сторону (здесь сторону Север для двигателей 61 и 62), параллельным оси Z; преимущественно эти двигатели находятся посредине этих кромок.
При отсутствии аварии такая пара двигателей достаточна для осуществления коррекции орбиты Восток-Запад (однако при этом генерируются усилия, параллельные Y) и необходимых корректировок орбиты в направлении, параллельном оси Y (необходимость тяги в направлении Юг удовлетворяется тягой к Северу, осуществляемой позже на полуорбиту).
Двигательная установка 60 содержит преимущественно вторую пару электрических ракетных двигателей 63 и 64, расположенных на противоположной стороне (сторона Юг), каждый из которых симметричен относительно другого по отношению к плоскости YZ; преимущественным образом две пары двигателей симметричны относительно друг друга по отношению к плоскости XZ.
Такая система приведения в движение всего только с четырьмя двигателями 61 - 64 позволяет даже в случае поломки одного из них осуществлять все необходимые операции корректировки орбиты (используя по мере возможности эти двигатели парами).
Всегда можно, не выходя за рамки изобретения, увеличить число электрических ракетных двигателей, если необходимо повысить надежность.
В принципе ракетные двигатели 61 - 64 имеют одну фиксированную ориентацию относительно корпуса спутника; однако в более сложном варианте возможно предусмотреть изменение их ориентации, хотя это приведет к увеличению веса спутника и уменьшит надежность.
Этот спутник имеет систему хранения кинетической энергии, не имеющую гироскопической жесткости, образованную реактивными колесами 15 - 17 (фиг. 7), которые служат также для хранения общего кинетического момента относительно какой-либо оси. С ними на практике объединены датчики скорости, схематически обозначенные 15А, 16А и 17А, способные выдавать сигнал угловой скорости по тангажу.
В действительности спутник обращается по своей переходной орбите (перед установкой в рабочую точку на геостационарной орбите), имея конфигурацию и ориентацию, отличающиеся от тех, которые он затем получит, что приводит к необходимости предусматривать специфическую систему управления его положением (не показанную на фиг. 14 и 15) для этой фазы выведения, как это видно на фиг. 16; система 70 использует преимущественно сопла 71 (см. фиг. 12 и 13) на одкокомпонентном топливе, как и электрические двигатели системы 60. Эти различные сопла питаются из одного и того же резервуара 72 при помощи систем 73 и 74 (любого известного типа) регулировки давления и расхода.
Этот спутник содержит (в нерассмотренном варианте) двигательную установку на двухкомпонентном топливе для фазы выведения на операционную орбиту (геостационарную или нет).
В представленном примере (см. фиг. 15) спутник снабжен на своей стороне Z двигательной установкой 80 для выведения на геостационарную орбиту; она может использовать твердое топливо.
Система электрических двигателей 60 может участвовать в выведении на операционную орбиту, геостационарную или нет. Для этой фазы выведения спутник (см. фиг. 15) может содержать, кроме того, дополнительную электрическую двигательную установку, содержащую (здесь) два электрических сопла 90, параллельных оси Z.
Моментная разгрузка до нуля накопленного реактивными колесами на рабочей орбите кинетического момента (причем орбита может быть геостационарной или нет) осуществляется преимущественно по трем осям X, Y и Z за счет использования давления солнечной радиации на крылья в комбинации с воздействиями на двигатели 6 и 6'.
В варианте корректировки положения по крену и рысканью могут осуществляться при помощи магнитных контуров, взаимодействующих с земным магнитным полем.
Разгрузка до нуля текущей компоненты кинетического момента может быть с успехом получена благодаря применению электрических ракетных двигателей 61-64 (достаточно создать разницу длительностей тяги между двумя двигателями, которые должны действовать одновременно).
Хотя рассматривалась возможность отсутствия гироскопической жесткости, изобретение может быть применено и в том случае, когда кинетический момент имеет постоянную не нулевую компоненту, например, по оси У (при наличии, следовательно, инерционного колеса с постоянным не нулевым моментом относительно этой оси Y, например, в соответствии с фиг. 5 и 6. Число колес может превышать три из соображений создания резерва (избыточности).
В качестве примера реализации можно указать, что показанный спутник является телекоммуникационным, имеющим вес 3000 кг при запуске, с большими солнечными генераторами площадью 80 м2, предусматривающими создание мощности 10 кВт в конце жизни, составляющей 15 лет.
Четыре ионных движителя фирмы МВВ (Германия) тягой 100 мН размещены в плоскости XY, со смещением на 60o относительно оси Y. Преимуществом такой конфигурации является хорошая эффективность для тяги Север или Юг, причем возмущающий момент вокруг оси Z ограничивается допустимой величиной для реактивных колес даже в случае функционирования при аварии одного из ракетных двигателей. Использованы три реактивных колеса емкостью ±15 Нмс. Их подпятники выполнены магнитными, без всякого трения, с резервированием электрической части внутри каждого колеса.
Солнечные генераторы постоянно ориентированы на Солнце благодаря наличию устройства 6+6', которое обеспечивает каждые сутки поворот генератора относительно спутника и позволяет также наклонять на несколько градусов (например, на 7o) продольную ось солнечного генератора относительно оси Y спутника. Эти два движения тщательно управляются при помощи бортового компьютера, что позволяет разгружать реактивные колеса, создавая необходимые солнечные моменты. В данном случае речь идет об управлении по трем осям спутника.
Коррекции орбиты осуществляются два раза в сутки в течение приблизительно одного часа, необходимая для этого электрическая энергия порядка 1,5 кВт обеспечивается батареей, которая подзаряжается между двумя маневрами.
Эта концепция тонкого управления (без кинетических моментов и химических сопел) такова, что любая авария вызывает только медленную эволюцию спутника, которая, следовательно, может быть легко обнаружена и быстро скомпенсирована перекоммутацией поврежденной части на резервную. Длительности перенацеливаний, следовательно, минимизированы, и гарантирован успех миссии, что является фундаментальным преимуществом.
Совокупность химических сопел используется номинально только на переходной орбите. Достаточно четырех химических сопел, но восемь сопел (не показаны) достаточны для ликвидации любой аварии. Они сгруппированы на стороне, противоположной Земле, вокруг апогейных двигателей. После первых недель жизни спутника они изолируются электроклапанами, что устраняет любой риск утечки и представляет собой значительное преимущество:
- отсутствие срочных вмешательств станций контроля, всегда деликатных в случае утечки топлива,
- отсутствие риска тепловых изменений, возникающих как следствие испарения в случае утечки,
- отсутствие риска сокращения жизни в результате потери топлива.
В случае (совершенно чрезвычайном) множественных аварий предусмотрено открывание электроклапанов для управления спутником, нацеленным на Солнце, при ожидании решения экспертов, которое приводит к возврату на солнечное управление (при этом химические сопла вновь закрываются).
Сравнение массы четырех двигателей с их горючим и классической системы с 12 химическими ракетными двигателями показывает выигрыш приблизительно 800 кг. В действительности для спутника с запускаемым весом четыре тонны и длительностью жизни 15 лет добавки сухой массы за счет электрических ракетных двигателей составляет 70 кг, однако выигрыш в горючем (химическая тяга) - (тяга на ксеноне) составляет 900 кг.
Структурная схема управления показана на фиг. 17. Она очень похожа на фиг.2 и 3.
Следует отметить, что в изобретении предлагается оригинальная комбинация известных элементов, испытанных на орбите в течение многих лет: колеса с магнитными подпятниками (спутники РОТ), устройства вращения солнечных генераторов (все геосинхронные спутники).
Приведенное описание было дано только в качестве неограничительного примера, многочисленные варианты, не выходящие за рамки изобретения, могут быть предложены специалистами. В общем виде, изобретение может быть применено на любом спутнике, снабженном по меньшей мере одной поверхностью, предназначенной принципиально для восприятия солнечного излучения и простирающейся от спутника в заданном направлении. Кроме того, порядок расположения приводных двигателей и двигателей качания может быть инверсным, в таком случае приводной двигатель расположен между двигателем управления качанием и крылом солнечного генератора. В частности, биения моторов качания могут быть увеличены без изменения принципа изобретения.
Изобретение применимо также к любому спутнику, для которого необходимые вычисления полностью или частично осуществляются на Земле.









Изобретение относится к области создания и управления ориентацией спутников, стабилизируемых по трем осям на геостационарной орбите. Спутник согласно изобретению содержит по меньшей мере одну поверхность, предназначенную принципиально для восприятия солнечного излучения и простирающуюся от спутника в заданном направлении Y, бортовой компьютер и связанную с последним систему детектирования положения, средства контроля орбиты, способные приложить к спутнику усилия тяги в направлении заданных осей, и средства управления положением. Этот спутник содержит, кроме того, средства управления качанием указанной поверхности параллельно множеству плоскостей, содержащих указанное заданное направление (следовательно, параллельно плоскости одного из крыльев солнечного генератора, когда оно образует указанную поверхность). Эти средства управления качанием управляются указанным бортовым компьютером. Это качание может служить для создания момента тангажа или приводить центр тяжести на ось воздействия средств контроля орбиты. Изобретение направлено на снижение массы и повышение надежности служебных систем спутника, а также на уменьшение возмущений и рост эффективности управления. 3 с. и 20 з.п. ф-лы, 17 ил. .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, 4834325, кл.B 64 G 1/44, 1989 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| FR, 2505288, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
