Изобретение относится к авиационным реактивным двигателям, в частности к устройствам для изменения вектора тяги, и особенно, к устройствам для реверсирования тяги двухконтурных турбореактивных двигателей со средствами компенсации погрешностей положения подвижной части и отклонений длиновых размеров звеньев на режиме прямой тяги.
Известно устройство для реверсирования тяги авиационного двухконтурного двигателя (патент США N 3500645, кл. F 02 K 1/00, 3/02, заявл. 10.04.68).
Известное устройство для реверсирования тяги содержит неподвижный корпус с реверсивной решеткой и подвижный корпус, а также поворотные створки для направления газов на реверсивную решетку. Поворотные створки взаимосвязаны с неподвижным корпусом с помощью телескопического компенсатора, корпус которого выполняет также роль соединительного рычага. Рабочий орган телескопического компенсатора в виде одного подпружиненного поршня со штоком шарнирно связан непосредственно с поворотной створкой.
Описанное устройство в достаточной степени способно компенсировать всякого рода длиновые погрешности. Однако при максимальном выдвижении поршня база центрирующих поверхностей невелика, а это приводит к малой устойчивости системы, особенно при наличии вибраций. В случае увеличения базы поршня увеличиваются габариты устройства, в частности длиновые, что может привести к загромождению газодинамического тракта на режиме прямой тяги. Таким образом, в связи с этими конструктивными особенностями система створка-рычаг-шток-корпус компенсатора недостаточно устойчива в тангенциальном направлении и может быть подвержена излишним вибрациям, что снижает надежность и долговечность устройства.
Известно устройство для реверсирования тяги реактивного двигателя (авт. св. СССР N 1713303, кл. F 02 K 1/72, заявл. 26.02.90).
Известное устройство содержит неподвижный корпус с отклоняющими решетками, подвижный корпус с поворотными створками, под которыми крепится двухзвенный рычажный механизм. Передний рычаг крепится на шарнире к неподвижному корпусу устройства через звено в виде подпружиненной качалки. Качалка на шарнире подвешена на неподвижном корпусе.
Следует отметить, что в описанном известном устройстве поставленная цель обеспечить гарантированную укладку рычагов заподлицо с трактовой поверхностью подвижного корпуса при его недоходах в положение прямой тяги не достигается. Это связано с особенностями кинематического механизма описанного устройства, что подтверждается схемой известного устройства соответственно на фиг. 1 и фиг. 2.
Рассмотрим положение известного устройства, представленное на фиг. 1.
Кинематическая схема известного устройства содержит четыре подвижных звена: качалку, первый рычаг, второй рычаг, створку и представляет собой многозвенный шарнирный механизм. Судя по описанию известного устройства и приведенным иллюстрациям все подвижные звенья взаимодействуют между собой только через шарниры, а створка подпружинена и находится в крайнем положении. Качалка также подпружинена и в данной кинематической схеме должна находиться на собственном упоре, как показано на фиг. 2. Причем при изменениях положения подвижного корпуса относительно неподвижного корпуса в пределах зазора S, положение качалки остается неизменным, а меняется положение рычагов, из чего следует, что гарантированная укладка первого рычага заподлицо с трактовой поверхностью не обеспечивается.
Кроме того, на режиме прямой тяги положение качалок, створок и рычагов, определяется не кинематически, а за счет усилия пружин.
Усилие пружин створок имеет разумное ограничение для обеспечения нормальной работы устройства при многократных перемещениях подвижного корпуса, к тому же оно уменьшается в процессе эксплуатации устройства. Все это создает предпосылки для колебаний створок, а вместе с ними и рычагов, под действием пульсирующего воздушного потока и вибраций, что приводит к нарушению геометрии газодинамического тракта на режиме прямой тяги и дополнительным потерям тяги двигателя, снижает надежность реальной конструкции.
Тем не менее автор считает описанное устройство для реверсирования тяги реактивного двигателя по авт. св. N 1713303 наиболее близким к заявляемому по техническому решению задачи и набору средств для этого решения.
Перед автором стояла задача, оптимально используя основные средства, известные из описанного прототипа, создать такое устройство для реверсирования тяги, в котором можно было бы обеспечить кинематическую определенность положения створки и рычагов в положении прямой тяги и тем самым стабилизировать геометрию газодинамического тракта для уменьшения потерь тяги двигателя и снижения уровня вибраций.
Этот технический эффект будет обеспечен тем, что в известном устройстве для реверсирования тяги реактивного двигателя, содержащем подвижную часть, поворотные створки, которые соединены непосредственно с подвижной частью, причем каждая створка шарнирно взаимосвязана с неподвижной частью посредством двух рычагов, один из которых шарнирно связан с рабочим органом компенсатора, произведено усовершенствование.
Усовершенствование заключается в том, что в положении прямой тяги рычаги каждой створки размещены один над другим на ограничительном упоре, дополнительно выполненном на одном из рычагов. Это позволяет добиться определенности положения системы, когда рычаг, соединенный с компенсатором, располагается по контуру газодинамического тракта.
В результате пара сложенных рычагов образует единое звено, противодействующее колебаниям створки благодаря пружинам компенсатора. Это способствует снижению вибраций устройства, обеспечивает кинематическую определенность положения створки и рычагов в газодинамическом тракте на прямой тяге, тем самым снижая потери тяги двигателя, уменьшая нагрузки и повышая надежность.
Этот технический эффект обеспечивается, если ограничение имеет место между рычагами или между створкой и рычагом, соединенным с ней. В последнем случае единым звеном становятся створка и соединенный с ней рычаг.
Наилучший результат достигается при условии, что ось соединения рабочего органа компенсатора и рычага не меняет своего положения относительно оси перемещения подвижной части устройства. При этом положение рычага, расположенного по контуру газодинамического тракта, остается неизменным в пределах действия компенсатора. Если же ось соединения рабочего органа компенсатора и рычага меняет некоторым образом свое положение относительно оси перемещения подвижной части по соображениям выполнения реальной конструкции или в результате изготовления, соответственно несколько меняется реальное положение соединенного с компенсатором рычага относительно контура газодинамического тракта, тем не менее эффект кинематической замкнутости створки рычагами и компенсатором присутствует.
Конструктивно рабочий орган компенсатора выполнен в виде двух поршней, параллельно размещенных по обе стороны от продольной оси рычага и жестко соединенных общим основанием, которое шарнирно взаимосвязано с рычагом. Такое выполнение компенсатора придает достаточную устойчивость его рабочему органу и способствует дальнейшему снижению вибраций и повышению надежности устройства.
Оси поршней теоретически параллельны оси перемещения подвижной части устройства.
Шарнирное соединение рычага с основанием рабочего органа компенсатора размещено между поршнями.
Чтобы габариты устройства (особенно это касается длиновых размеров) были меньше, крепление корпуса компенсатора на неподвижной части размещено по потоку за шарнирным соединением рычага с поршнями.
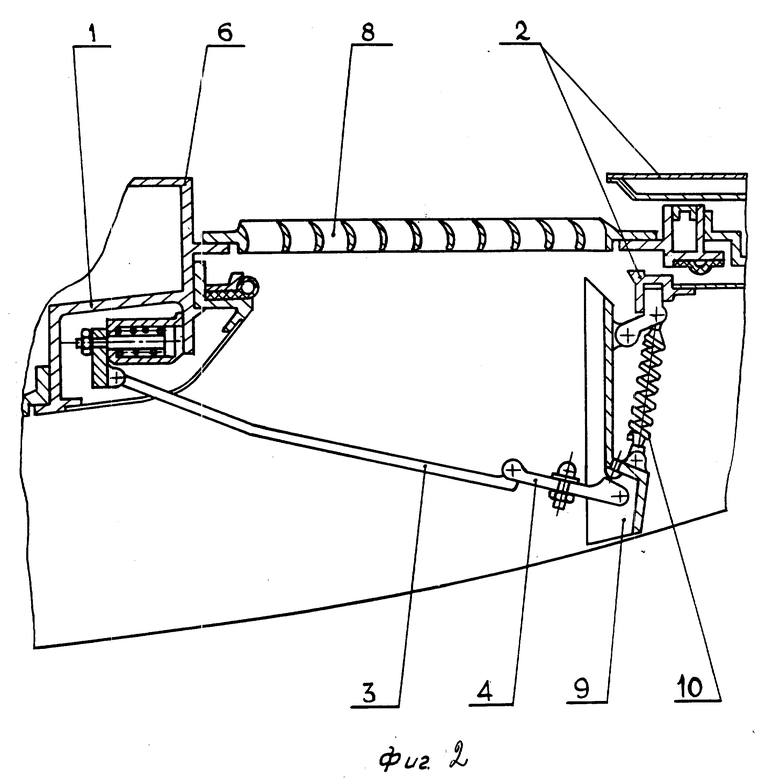
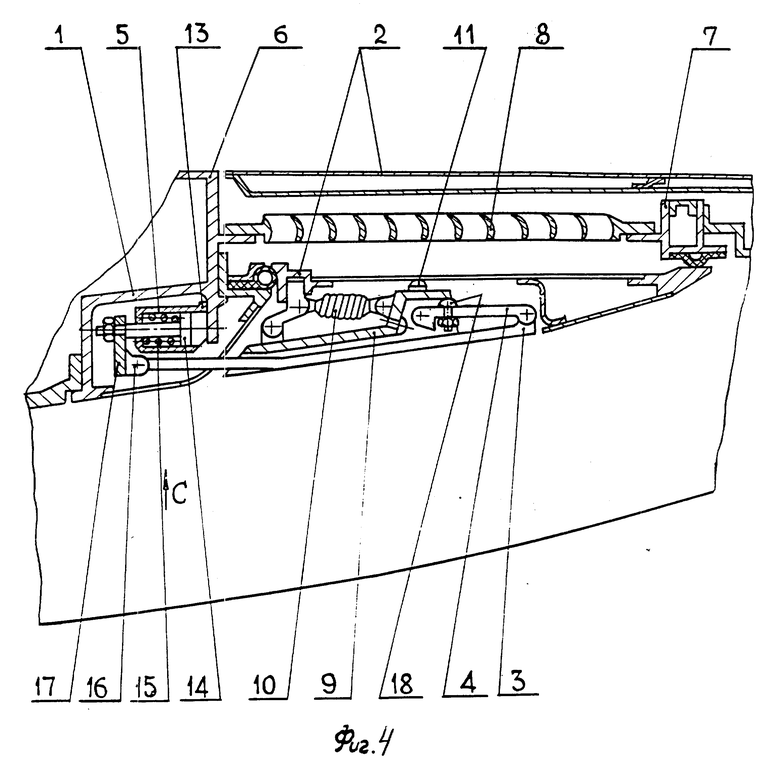
На фиг. 1 представлен продольный разрез заявляемого устройства для реверсирования тяги на режиме прямой тяги; на фиг. 2 показан продольный разрез заявляемого устройства на режиме обратной тяги; на фиг. 3 показан вид по стрелке С на компенсатор; на фиг. 4 представлен вариант заявляемого устройства на режиме прямой тяги; на фиг. 5 представлено известное из прототипа, показанное схематически, устройство для реверсирования тяги в исходном положении на режиме прямой тяги, когда подвижный корпус находится в крайнем положении; на фиг. 6 представлено также известное устройство, но в положении, когда подвижный корпус располагается с зазором относительно неподвижного корпуса.
Предлагаемое устройство для реверсирования тяги авиационного реактивного двигателя содержит неподвижный корпус 1, подвижный корпус 2, соединительные рычаги 3 и 4, компенсатор 5. Неподвижный корпус 1 снабжен силовыми кольцами 6 и 7, между которыми установлены решетки 8, служащие для поворота воздушного потока. Поворотные створки 9 взаимосвязаны с подвижным корпусом 2. На прямой тяге створки 9 дополнительно взаимодействуют с подвижным корпусом 2 через упоры 11.
Рычаги 3 и 4 кинематически связывают створки 9 и компенсаторы 5, закрепленные на кольце 6. Соединение рычагов 3 и 4 между собой на створках 9 и компенсаторах 5 - шарнирное. На рычаге 4 установлен регулируемый упор 12, ограничивающий угол складывания рычагов 3 и 4 в положении прямой тяги.
Компенсатор 5 включает в себя корпус 13, поршни 14, пружины 15, петлю 16 с основанием 17. Корпус 13 жестко закреплен на кольце 6 неподвижного корпуса. Поршни 14 и петля 16, соединяемая с рычагом 3 через шарнир 18, жестко связаны между собой основанием 17. Пружины 15 стремятся сместить поршни 14 в направлении по потоку и создают усилие в пределах всего хода поршней 14 компенсатора 5.
Устройство работает следующим образом.
На режиме прямой тяги элементы устройства занимают положение, как показано на фиг. 1. Створки 9 поджаты пружинами 10 в крайнее положение, ограничиваемое упорами 11, и вписываются в контур газодинамического тракта двигателя. Рычаги 3 и 4 сложены и поджаты до соприкосновения рычага 3 и упора 12. Компенсатор находится в сжатом состоянии, а между корпусом 13 и основанием 17 петли 16 имеется зазор как на фиг. 1.
При переходе реверсивного устройства из положения прямой тяги в положение реверсирования тяги подвижный корпус 2 смещается назад по газодинамическому тракту вдоль оси двигателя, открывая решетки 8. При этом выбирается зазор между основанием 17 петли 16 и корпусом 13 компенсатора 5, затем происходит раскладка рычагов 3 и 4, а после этого - поворот створки 9.
В положении реверсирования тяги, как показано на фиг. 2, створки 9 перекрывают газодинамический тракт двигателя, воздушный поток, поворачиваясь в решетках 8, создает обратную тягу.
При переходе реверсивного устройства из положения реверсирования тяги в положение прямой тяги вначале под действием пружин 10 и воздушного потока укладываются створки 9, затем рычаги 3 и 4 до соприкасания рычага 3 с упором 12. В конце перемещения подвижного корпуса 2 суммарные погрешности величины хода и отклонения размеров всех кинематических звеньев поглощаются компенсаторами 5.
В пределах хода рабочего органа компенсатора 5 взаимное расположение рычагов 3 и 4 сохраняется (или меняется незначительно при погрешностях изготовления устройства), рычаг 3 вписывается в контур газодинамического тракта. Тем самым исключается влияние погрешностей взаимного расположения неподвижного корпуса 1 и подвижного корпуса 2 на положение рычагов 3 и 4. Это достигается тем, что оси поршней 14 компенсаторов 5 параллельны продольной оси перемещения подвижного корпуса 2.
Упор 12 является регулируемым, что позволяет достаточно точно расположить рычаг 3 по наружной поверхности газодинамического тракта двигателя на режиме прямой тяги.
При взаимном смыкании рычагов 3 и 4 через упор 12 трехзвенный механизм: створка 9 - рычаг 3 - рычаг 4, преобразуется в двухзвенный: створка 9 - сложенные рычаги 3 и 4, в котором амплитуда возможных колебаний ограничена остатком хода в компенсаторе и зазорами в шарнирных соединениях, а створка 9 поджата не только собственными пружинами 10, но и пружинами 15 компенсаторов 5.
Как вариант устройство для реверсирования тяги имеет ограничительный упор 18, расположенный не между рычагами 3 и 4, а между створкой 9 и рычагом 4, что показано на фиг. 6, и по функционированию и достигаемому результату аналогично приведенному с той разницей, что единым звеном становятся створка 9 и соединенный с ней и находящийся в крайнем положении на упоре 18 рычаг 4.
На режиме прямой тяги все кинематические звенья устройства занимают определенное, кинематически однозначное положение и подпружинены, зазоры в соединениях выбраны и таким образом предлагаемое устройство должно обеспечивать стабильность газодинамического тракта, обладать высокой стойкостью к вибрациям при воздействиях воздушного потока, а, следовательно, высокой надежностью и долговечностью.



Изобретение предназначено для авиационных реактивных двигателей. Устройство содержит подвижный корпус 2, шарнирно связанный с поворотными створками 9. Каждая из створок шарнирно взаимосвязана с неподвижным корпусом 1 посредством двух рычагов 3 и 4 и компенсатора 5. Рычаги каждой створки размещены на ограничительном упоре 12 и 18, выполненном на одном из рычагов. Каждая створка установлена с упором 11 в подвижный корпус и замкнута сложенными рычагами. Упоры выполнены регулируемыми по высоте. Корпус компенсатора жестко закреплен в виде двух поршней 14. Поршни размещены по обе стороны первого рычага и соединены общим основанием 17, которое шарнирно взаимосвязано с первым рычагом. Размещение таким образом рычагов снижает потери тяги двигателя, уменьшает вибрации, повышает надежность. 5 з.п. ф-лы, 6 ил.
Устройство по пп. 2 и 3, отличающееся тем, что указанный ограничительный упор выполнен регулируемый по высоте.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 3500645, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| FR, патент, 91242, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

