Изобретение относится к радиолокации и может быть использовано при проведении радиометеорологических измерений.
Известны способы калибровки радиолокатора [1], основанные на использовании пассивных или активных отражателей. Применение указанных способов ограничено в связи с трудностями обнаружения цели на фоне местных отражений.
Известен способ калибровки радиолокатора [3] , выбранный в качестве ближайшего аналога, заключающийся в отсчете принятых эхо-сигналов от уровня калибровочного сигнала, сформированного из гетеродинного сигнала смещением на величину промежуточной частоты с последующим выделением гармоники и формированием импульса, длительность которого равна длительности излучаемого импульса, а уровень составляет определенную часть мощности передатчика, для чего формируемый сигнал сравнивают с ослабленной в несколько раз частью зондирующего импульса, поддерживая постоянным соотношение Ptτ/Pk= K , где Ptτ - интегральная мощность передатчика, Pk - импульсная мощность калибровочного сигнала, K - постоянная, при этом калибровочный сигнал подают в приемный тракт непосредственно перед излучением зондирующего сигнала, а сравнение калибровочного и эхо-сигналов выполняют после преобразования сигналов, осуществляемого в приемной части.
Известен радиолокатор [2], содержащий синхронизатор, модулятор, импульсный СВЧ-генератор, приемно-передающую антенну, антенный переключатель, приемник, детектор и оконечное устройство. Такое построение схемы не позволяет осуществлять калибровку радиолокатора.
Известен радиолокатор [3], выбранный в качестве ближайшего аналога, содержащий последовательно соединенные передатчик, переключатель "антенна-эквивалент", антенный переключатель, второй направленный ответвитель и антенну, подключенные к второму выходу антенного переключателя смеситель, приемный тракт (усилитель промежуточной частоты и детектор) и индикаторы, а также первый направленный ответвитель, вход, первый и второй выходы которого подключены соответственно к второму выходу переключателя "антенна-эквивалент", эквиваленту антенны и второму входу второго направленного ответвителя, и, кроме того, короткозамкнутую линию задержки, подключаемую к выходу смесителя или к второму выходу приемного тракта, и индикаторную часть измерителя, подключаемую к третьему выходу приемного тракта.
Недостатки способа калибровки заключаются в следующем.
При проведении радиолокационных измерений мощность принятого сигнала обычно отсчитывается от некоторого начального уровня, за который принимается уровень шумов приемника или уровень сигнала шумового генератора (минимально обнаружимый сигнал). Основой для количественных измерений в метеорадиолокации является уравнение множественной цели, связывающее характеристики цели с принятой мощностью и параметрами РЛС.
где  - средняя мощность принятого сигнала;
- средняя мощность принятого сигнала;
Pt - излученная мощность;
G - эффективный коэффициент усиления антенны;
λ - длина волны;
c - скорость распространения радиоволн;
τ - длительность зондирующего импульса;
θ - ширина диаграммы направленности;
η - суммарное поперечное сечение обратного рассеяния единичного объема;
Ko - коэффициент ослабления;
R - расстояние до выделенного объема.
При количественных измерениях уравнение (1) представляют в виде:
Здесь δ - отношение мощности принятого сигнала  к минимально обнаружимому сигналу
к минимально обнаружимому сигналу  , Пм - характеристика метеорологического потенциала МРЛ, определяемая соотношением:
, Пм - характеристика метеорологического потенциала МРЛ, определяемая соотношением:
Однако за начальный уровень, от которого отсчитывается мощность принятого сигнала, в ближайшем аналоге принят не уровень шумов приемника, а реперный (калибровочный) сигнал, формируемый из части зондирующего импульса и подаваемый на вход приемника. При этом уравнение (3) приведено к виду:
где Δ - отношение мощности принятого сигнала  к величине реперного сигнала Pk.
к величине реперного сигнала Pk.
Из уравнения (4) следует, что параметрами радиолокатора, которые необходимо знать при измерении радиолокационных сигналов, отраженных от метеообразований, являются только антенные характеристики, длина волны и постоянная K. В связи с тем, что реперный сигнал проходит в приемном тракте те же преобразования, что и принятые сигналы, а его величина на входе приемника жестко связана с мощностью передатчика, значения выходных сигналов, отсчитанные от уровня реперного сигнала, не будут зависеть от параметров передатчика, а также чувствительности, усиления и точности настройки приемника.
Фактически отпадает необходимость в поддержании постоянства калибровочного сигнала, а точность измерений определяется стабильностью величины K.
Недостатком рассматриваемого способа калибровки является то, что не учитывается различие в спектральных характеристиках зондирующего и реперного сигналов, а также неидеальность совпадения их частот. Эти различия обусловлены тем, что реперный сигнал в данном способе формируется из гетеродинного путем смещения на величину промежуточной частоты с последующим выделением гармоники.
Для поддержания постоянства соотношения частот основного и реперного сигналов в рассматриваемом способе используется система автоматической подстройки частоты (АПЧ) радиолокатора. Как известно, уход частоты магнетронного генератора составляет 0,1 - 0,5%, что соответствует примерно 15 МГц, например, для радиолокатора МРЛ-2 [4]. В то же время известно [2], что длительность переходных процессов в системе АПЧ значительно больше периода повторения импульсов (например, в радиолокационной станции (РЛС) "Гроза" постоянная времени составляет 15 - 30 с [5], а полоса пропускания усилителя промежуточной частоты (УПЧ) (в среднем) - 0,4 - 3,2 МГц. Очевидно, что в случае быстрых изменений частоты магнетрона отраженный сигнал может быть не преобразован в системе смеситель-УПЧ, что приведет к потере информации. Кроме того, такое изменение неизбежно снижает точность калибровки, поскольку, считая частоту генерации гетеродина достаточно стабильной, реперный сигнал будет полностью преобразовываться в приемном тракте, создавая ложное представление о том, что система функционирует нормально. Поскольку отсчет эхо-сигналов будет осуществляться от полностью преобразованного репера, то определение величины  будет осуществляться со значительной погрешностью, величина которой будет непостоянной и зависящей от параметров реперного и зондирующего сигналов.
будет осуществляться со значительной погрешностью, величина которой будет непостоянной и зависящей от параметров реперного и зондирующего сигналов.
Еще одним недостатком является наличие трудноучитываемой погрешности, обусловленной различием спектральных характеристик сигналов. Создание калибровочного сигнала из гетеродинного путем модуляции с последующим выделением гармоники формирует спектр, не совпадающий со спектром импульсного сигнала, причем последний может иметь непостоянные спектральные характеристики.
Проиллюстрировать данное утверждение можно с помощью следующих построений. Эхо-сигнал представляет собой, как известно, импульсный случайный процесс, энергетический спектр которого может быть описан соотношением [6]:
где F(f) - амплитудный спектр сигнала;
So(f) - нормированный энергетический спектр зондирующего импульса;
Hn - коэффициент преобразования излучаемого сигнала исследуемой целью.
При отсчете эхо-сигнала от калибровочного ошибка определения  вычисляется из соотношения:
вычисляется из соотношения:
Поскольку оба сигнала проходят преобразования в приемном тракте РЛС, то при переходе от (5) к (6) необходимо ввести соответствующие коэффициенты преобразования (КП). Тогда
где μo - КП эхо-сигнала;
μk - КП репера;
So(f)k - нормированный энергетический спектр калибровочного импульса.
Введение в (7) μo и μk объясняется тем, что при преобразовании сигналов в приемном тракте радиолокатора происходит дробление спектра, которое не может быть одинаковым для разных сигналов. В результате можно записать:
В силу неравенства спектров So(f) и So(f)k не совпадают и величины μo и μk . Возможные быстрые изменения спектра излучаемого сигнала, обусловленные частотной модуляцией, делают величины So(f) и So(f)k практически несопоставимыми, в силу чего величина δ Pr становится постоянно меняющейся в ту или иную сторону. В результате КП также постоянно изменяется, что влияет на точность калибровки.
Таким образом, можно утверждать, что формирование калибровочного сигнала в соответствии с рассматриваемым способом приводит к появлению неконтролируемой и трудноучитываемой погрешности.
Для реализации данного способа в схему радиолокатора должны быть внесены существенные изменения. При этом в случае оборудования действующего серийного радиолокатора неизбежны достаточно серьезные изменения в СВЧ-тракте, которые не всегда возможны ввиду очень плотной компоновки блока (например, в самолетной РЛС типа "Гроза" [2]).
Кроме того, наличие нескольких элементов регулирования обусловливает зависимость постоянства величины K от стабильности параметров этих блоков, что либо подразумевает наличие постоянной погрешности, вносимой этими блоками, либо применение дополнительных мер стабилизации, еще более усложняющих блок, приводящих к увеличению стоимости устройства.
Недостатком рассматриваемой схемы радиолокатора является то, что проведение калибровки невозможно в процессе измерения, что снижает точность получаемых результатов. Кроме того, использование данного устройства в серийно выпускаемых радиолокаторах приводит к необходимости изменения СВЧ-тракта, что не всегда возможно в силу плотности компоновки блока.
Задача, на решение которой направлено изобретение, включает повышение точности калибровки, упрощение схемы и уменьшение стоимости радиолокаторов, реализующих данный способ, а также обеспечение возможности автоматической калибровки.
Решение поставленной задачи достигается тем, что в способе калибровки радиолокатора, заключающемся в отсчете принятых эхо-сигналов от уровня калибровочного сигнала, составляющего известную часть мощности передатчика, осуществляемом после преобразований эхо-сигнала в приемной части радиолокатора, калибровочный сигнал формируют из паразитного импульса, просочившегося через антенный переключатель на вход приемной части радиолокатора в момент излучения зондирующего импульса ослаблением (мощности) просочившегося паразитного импульса на известную величину до уровня, входящего в динамический диапазон сигналов приемника.
Решение поставленной задачи достигается тем, что в устройство радиолокационной станции, содержащее последовательно соединенные передатчик, антенный переключатель и антенну, а также приемник, дополнительно введены управляемый выключатель, включенный между входом приемника и выходом антенного переключателя, последовательно соединенные ключ, интегратор и блок вычитания, второй вход которого подключен к выходу приемника, а выход является выходом радиолокатора, синхронизатор, выход которого подключен к управляющему входу передатчика, формирователь управляющих импульсов, включенный между синхронизатором и управляющим входом управляемого выключателя, причем вход и управляющий вход ключа подключен соответственно к выходу приемника и к синхронизатору.
По второму варианту радиолокационная станция отличается тем, что между выходом синхронизатора и выходом формирователя управляющих импульсов включена линия задержки.
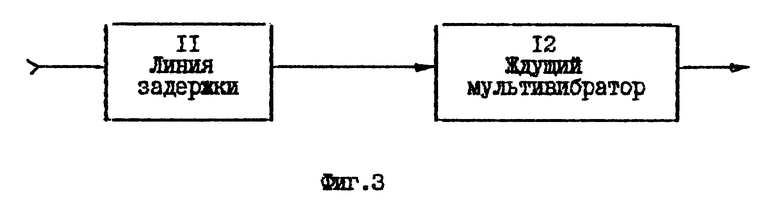
По третьему варианту радиолокационная станция отличается тем, что формирователь управляющих импульсов состоит из последовательно соединенных линий задержки и ждущего мультивибратора, причем вход линии задержки и выход ждущего мультивибратора являются соответственно входом и выходом формирователя.
По четвертому варианту радиолокационная станция отличается тем, что между выходом синхронизатора и управляющим входом передатчика включена линия задержки.
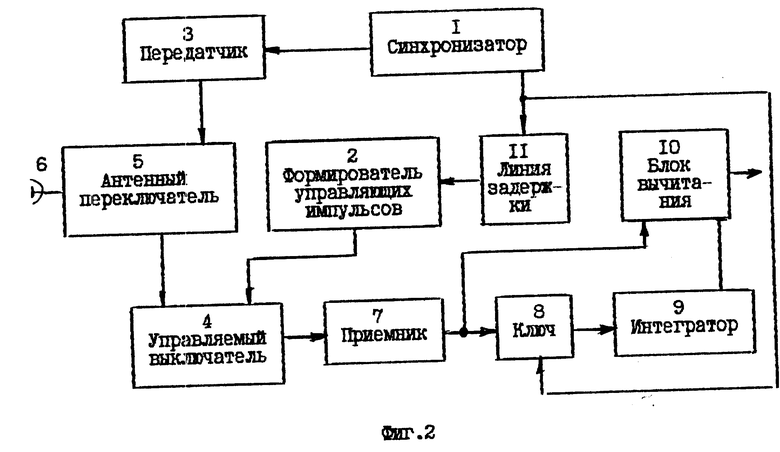
На фиг. 1 показана схема радиолокатора; на фиг.2 - 4 - схемы вариантов.
Радиолокатор содержит синхронизатор (Сх) 1, формирователь управляющих импульсов (ФУИ) 2, передатчик 3, управляемый выключатель (УВ) 4, антенный переключатель (АП) 5, антенну 6, приемник 7, ключ 8, интегратор 9, блок вычитания (БВ) 10.
Устройство работает следующим образом. Синхроимпульс с выхода Сх 1 поступает на вход ФУИ 2 и управляющий (запускающий) вход передатчика 3. Последний под воздействием синхроимпульса вырабатывает мощный СВЧ-импульс, через АП 5 передаваемый на антенну 6 и излучаемый в пространство. Одновременно часть энергии зондирующего импульса через АП 5 "просачивается" на вход УВ 4. Благодаря тому, что синхроимпульс одновременно поступает также и на вход ФУИ 2, последний вырабатывает управляющий сигнал, подаваемый на управляющий вход УВ 4. В результате УВ 4 ослабляет просочившийся сигнал до уровня, соответствующего динамическому диапазону приемника 7, т.е. до уровня, достаточного для того, чтобы от него отсчитывать принятые эхо-сигналы, и безопасного для входных цепей, например, смесительных диодов. С выхода приемника 7 сформированный таким образом реперный (калибровочный) сигнал через управляемый синхроимпульсом ключ 8 поступает на интегратор 9 и после усреднения подается на второй вход БВ 10.
Отраженные эхо-импульсы принимаются антенной 6 и, пройдя через АП 5, УВ 4 и приемник 7, поступают на первый вход БВ 10. После сравнения с репером этот сигнал передается на последующие устройства обработки.
Включение в приемный тракт УВ 4, управляемого с помощью ФУИ 2, позволяет вносить постоянное затухание в просачивающийся на вход приемной части сигнал. При подаче на управляющий вход УВ 4 сигнала, осуществляющего полное "запирание", поддерживается постоянное соотношение K = Ptτ/Pk. \\2 Так как управляющий сигнал на УВ 4 подается только в момент излучения зондирующего импульса, то УВ 4 не мешает свободному прохождению эхо-сигналов на вход приемника 7.
Управляющий сигнал формируется ФУИ таким образом, чтобы "запирание" УВ 4 произошло несколько ранее, а "отпирание" - несколько позднее подачи зондирующего импульса. Этим обеспечивается защита смесительных диодов приемной части от просочившегося импульса и обеспечивается стабильность величины K.
В случае реализации радиолокатора по схеме фиг.2 поступающий с выхода Сх 1 синхроимпульс задерживается ЛЗ 11 на время t, необходимое для того, чтобы ФУИ 2 выработал управляющий импульс непосредственно перед излучением зондирующего импульса.
Формирователь управляющих импульсов может быть реализован, например, по схеме фиг.3. Поступающий с выхода Сх 1 синхроимпульс задерживается ЛЗ 11 на время t, необходимое для того, чтобы ждущий мультивибратор (ЖМ) 12 выработал управляющий импульс непосредственно перед излучением зондирующего импульса.
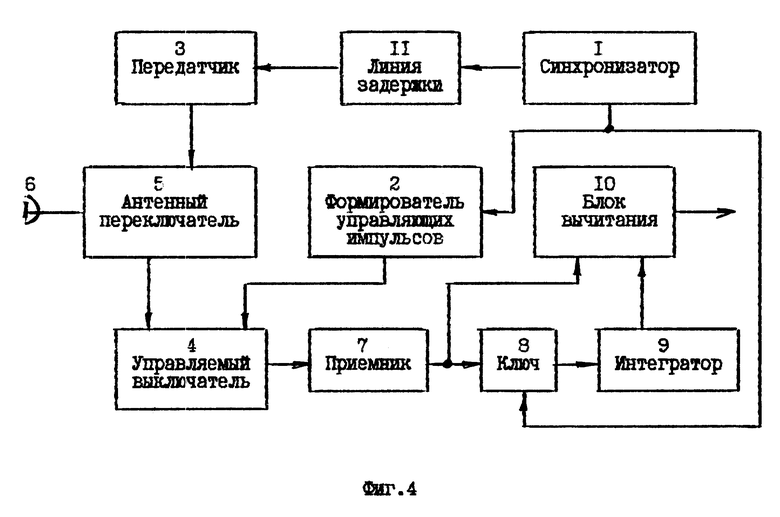
Радиолокатор по схеме фиг. 4 отличается тем, что ЛЗ 11 включена между выходом Сх 1 и передатчиком 3. Такое решение позволяет использовать линию с небольшим временем задержки. Работа основных узлов не отличается от других схем.
Использование предложенного способа позволяет устранить погрешности, связанные с кратковременными уходами частоты и изменениями спектра излучаемого сигнала. Поскольку калибровочный сигнал формируется из основного, можно говорить о совпадении их спектральных характеристик [So(f) = So(f)k], в силу чего (8) приобретает вид:
δPr= 1-Hn/ (9)
(в силу одинаковости спектров μo= μk ).
Таким образом, погрешность будет определяться только точностью определения коэффициента преобразования сигнала исследуемым объектом и не будет зависеть от различия излучаемого и калибровочного сигналов.
Использование предложенного решения позволит повысить точность калибровки за счет устранения погрешностей, вносимых устройствами сравнения и регулировки мощности. Управление выключателем 4 осуществляется стабилизированным по амплитуде сигналом, что легко обеспечить с помощью простых методов (например, использованием логических схем). Сам УВ 4 работает в ключевом режиме, обеспечивая либо свободное без ослабления прохождение полезного эхо-сигнала, либо прохождение "паразитного" сигнала при заданном ослаблении. При этом любые изменения мощности передатчика автоматически учитываются, т. к. величина K постоянна.
Кроме того, существенно упрощается реализация способа калибровки (см. схему радиолокатора), поскольку исключаются серьезные изменения в СВЧ-тракте. По предлагаемому варианту изменения в СВЧ-тракте сводятся к замене разрядника, как правило, используемого для защиты смесительных диодов, на управляемый выключатель, который может быть реализован, например, на основе p-i-n диодов и имеет габаритные размеры, соизмеримые с размерами разрядника.
Литература.
1. Потемкин И.Г. Методы и устройства абсолютной и относительной калибровки метеорологических радиолокаторо. Труды ЦАО, вып.126, 1971, с. 63-73.
2. Давыдов П.С., Сосновский В.А. и Хаймович И.А. Авиационная радиолокация. Справочник. Транспорт, 1984, 223 с.
3. Латинский С. М., Шарапов В.И., Ксенз С.П. и Афанасьев С.С. Теория и практика эксплуатации радиолокационных систем. / Под ред. С.М. Латинского. М.: Сов.радио, 1970, с. 133-141.
4. Потемкин И.Г. Автоматическая калибровка и стабилизация потенциала метеорологических радиолокаторов. Труды 4-го Всесоюзного совещания по радиометеорологии. М.: Гидрометеоиздат, 1978, с. 177-184.
5. Булкин В. В. и Костров В.В. О возможности применения самолетной РЛС "Гроза" в радиометеорологических измерениях. Измерительная техника, 1996, N 2, с. 55-57.
6. Юрчак Б.С. О влиянии характеристик приемника метеорологической РЛС на точность измерения радиолокационной отражаемости метеообъектов. Труды ИЭМ. 1975, вып. 9 (52), с. 137-151.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННОЙ ОТРАЖАЕМОСТИ | 1989 |
|
RU2030763C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕОСНОВНЫХ ИЗЛУЧЕНИЙ РАДИОПЕРЕДАТЧИКОВ | 1995 |
|
RU2126976C1 |
| СИСТЕМА ОПЕРАТИВНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 1998 |
|
RU2125277C1 |
| РАДИОЛОКАТОР | 1984 |
|
SU1841061A1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840991A1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| Метеорологическая радиолокационная станция | 1982 |
|
SU1058444A1 |
Изобретение относится к радиолокации и может быть использовано при проведении радиометеорологических измерений. Решаемая задача - повышение точности калибровки, упрощение схемы, уменьшение стоимости радиолокаторов, а также обеспечение возможности автоматической калибровки. Сущность изобретения состоит в том, что калибровочный сигнал в приемной части радиолокатора формируют из паразитного импульса, просочившегося через антенный переключатель на вход приемной части радиолокатора в момент излучения зондирующего импульса ослаблением мощности просочившегося паразитного импульса, а в радиолокатор дополнительно введены управляемый выключатель, ключ, интегратор, блок вычитания, формирователь управляющих импульсов, синхронизатор. Приведена схема радиолокатора и его вариантов. 2 с. и 3 з.п. ф-лы, 4 ил.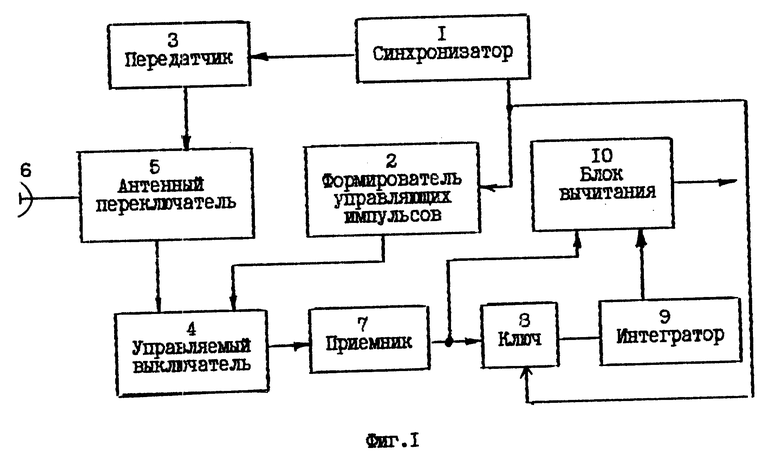
| Латинский С.М | |||
| и др | |||
| Теория и практика эксплуатации радиолокационных систем | |||
| - М.: Сов.радио, 1970, с | |||
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
