Изобретение относится к ортопедии и может быть использовано в протезостроении.
Изобретение касается сустава или же поворотного соединения в ортопедических протезах и ортезах, содержащих верхнюю часть сустава, нижнюю часть сустава и, при известных условиях, промежуточные поводки (обозначаемые ниже обобщенно как "звенья сустава"),а также управляющий элемент, действующий с двух сторон через отнесенную от шарнирной оси соответствующую точку сочленения на соответствующее звено сустава (в дальнейшем - сочленяемое звено сустава).
Этот сустав может представлять собой, например, моноцентрический или полицентрический коленный сустав протеза, причем конфигурация отдельных звеньев сустава в расчет не принимается.
В рамках изобретения не придается значения тому, воздействуют ли управляющие элементы или управляющие системы на отдельный сустав или поворотные соединения.
Контроль движения суставов в ортопедических протезах и ортезах осуществляется в известных вариантах выполнения лишь в ограниченной мере. Это связано, прежде всего, с тем, что контроль за движением во многих случаях происходит пассивно. Технические функциональные элементы не могут в этих случаях действовать сами, например, самостоятельно генерировать движения, а ограничиваются, как правило, тем, что пассивно реагируют на движения, воздействуя на них задерживающими и/или упруго-амортизирующими системами. Это типично для суставов ортопедических протезов ног. Так, например, в известных коленных суставах протезов предпочтительно применяются задерживающие движения и/или упруго-амортизирующие системы, которые либо в принципе противодействуют любому движению сустава, либо целенаправленно поддерживают отдельные движения сустава за счет предварительно накопленной энергии. Известным примером упруго-амортизирующего функционального элемента служит часто применявшаяся раньше в традиционных так называемых коленно-икроножных пригоночных деталях эластичная коленоразгибательная лента, фиксируемая на бедре и голени протеза и проходящая спереди коленного сустава. С началом сгибания колена из предварительно натянутого положения разгибания она все сильнее натягивается. Вследствие этого она противодействует движению сгибания колена и поддерживает движение возврата в положение разгибания. Данный функциональный элемент имеет, однако, существенный недостаток: момент разгибания колена, вытекающий из действия ленты, непрерывно возрастает с увеличением угла сгибания колена. Тем самым ограничивается возможность без особых усилий занимать сидячее положение, при котором коленный сустав протеза находится примерно на 90o в согнутом положении, не прибегая к дополнительным техническим мерам, поскольку в этом положении тела в значительной степени ненагруженная голень протеза стремится возвратиться в свое выпрямленное положение.
В современных ортопедических протезах и ортезах для управления суставом используются управляющие элементы или же управляющие системы, шарнирно закрепленные между отдельными звеньями сустава таким образом, что расстояние между их точками сочленения изменяется в зависимости от движения сустава или поворота. Применение такого рода управляющих элементов известно, например, в локтевых суставах, голеностопных, коленных и тазобедренных суставах ортопедических протезов ноги, в области лучезапясных суставов и в области локтя ортопедических отртезов руки или в голеностопных, коленных и тазобедренных суставах ортопедических ортезов ноги.
Однако наиболее широко распространены управляющие элементы указанного вида в моноцентрических и полицентрических коленных суставах ортопедических протезов ноги. Поэтому в нижеследующем изложении ссылки будут производиться преимущественно на эту область применения. Здесь управляющие элементы служат для повышения надежности колена выпрямленного протеза на фазе стояния при ходьбе, когда протез поддерживает тело и/или для управления движением голени протеза на фазе колебания, когда голень качается взад и вперед, а другая нога поддерживает тело.
В основу изобретения положена задача создать описанный в начале вариант выполнения сустава с улучшенными свойствами.
В связи с вышеописанными признаками суставов эта задача решается согласно изобретению тем, что, по меньшей мере, одна из указанных точек сочленения установлена с возможностью звена сустава и через механическую принудительную связь кинематически соединена, по меньшей мере, с одним другим звеном сустава.
При этом изменение положения, по меньшей мере, одной из указанных точек сочленения может происходить по круговой траектории вокруг оси вращения, предусмотренной на сочленяемом звене сустава; изменение положения может представлять собой также скольжение вдоль заданной траектории скольжения.
Механическая принудительная связь может состоять из цилиндрической зубчатой передачи, выполненной одно- или многоступенчатой, причем одна ступень может представлять собой зубчатую или фрикционную передачу. Колеса одной ступени передачи могут быть выполнены в виде пары зацепляющихся или обкатывающихся друг по другу кулачковых дисков. Другие варианты являются предметом зависимых пунктов формулы изобретения и поясняются другими примерами выполнения. Изменение положения, по меньшей мере, одной точки сочленения относительно сочленяемого звена сустава этой точки может происходить вдоль траектории, которую можно довольно свободно варьировать при последовательном использовании всех рациональных вариантов передач в зависимости от желаемого действия. Тем самым конструктору впервые предоставляется возможность оптимизировать несколько отдельных функций независимо друг от друга.
Принципиально различаются прямые и косвенные воздействия предложенного по изобретению изменения положения на отдельные функциональные признаки указанных суставов.
Прямое влияние, согласно изобретению, может оказываться, например, на величину и характер общего эффективного плеча рычага сочленения в отношении силового воздействия управляющего элемента на центр вращения моноцентрического сустава или мгновенный центр движения полицентрического сустава. Непосредственному влиянию могут быть подвергнуты также величина и характер хода на управляющем элементе, а также положение реверсирования действия.
Косвенному влиянию могут подвергаться моменты на суставе от действия работающего на принципе механического трения управляющего элемента, задерживающего движение. То же самое относится к моментам на суставе от действия упруго-амортизирующего управляющего элемента, а также от действия управляющего элемента, задерживающего движение, действие которого зависит от скорости его поступательного движения (сюда относятся, в частности, жидкостные амортизаторы).
Косвенное влияние, которое оказывает, согласно изобретению, изменение положения сочленения на упомянутый последним вид управляющих элементов, вытекает из следующей взаимосвязи.
Ход на управляющем элементе как величина, подверженная прямому влиянию, находится в кинематической зависимости от углового движения соответствующего сустава. Для определенных образцов движения конечностей человека угловые движения находятся в зависимости от времени, т.е. имеют характерный профиль угловых скоростей. Управляющие элементы в виде жидкостных амортизаторов, применяемые в одном и том же типе сустава ортопедического вспомогательного средства, например, в коленном суставе протеза ноги, с целью максимально возможного копирования естественного углового движения могут выполнить эту задачу при заданном профиле угловых скоростей, как это показывает опыт, лишь в том случае, если одновременно и уровень скорости их штока достаточно высок. Для этого необходим минимальный ход, который едва ли возможен в обычных вариантах выполнения, если одновременно предъявляются другие функциональные требования. Благодаря целенаправленному использованию замысла изобретения, который заключается в изменении положения сочленения, зависящем от угла сустава, удается путем увеличения хода и приспосабливания характеристики хода в качестве прямого воздействия одновременно желаемым образом увеличить и скорость хода как косвенное воздействие.
Моноцентрический коленный сустав протеза может согласно изобретению характеризоваться тем, что нижняя часть сустава жестко связана с первым цилиндрических колесом, установленным коаксиально шарнирно оси и находящимся в зацеплении со вторым цилиндрическим колесом, которое своей осью вращения поворотно установлено на верхней части сустава параллельно шарнирно оси перед ней (со стороны разгибания) или позади нее (со стороны сгибания) и имеет плечо кривошипа, на котором через, по меньшей мере, одну точку сочленения шарнирно закреплен управляющий элемент.
Полицентрический коленный сустав протеза в виде четырехзвеной кинематической шарнирной цепи, в которой верхняя часть сустава связана с нижней частью сустава через передний (со стороны разгибания) и задний поводок (со стороны сгибания), может быть выполнен согласно изобретению так, что передний поводок коаксиально своей верхней шарнирной оси, связывающей его с верхней частью сустава, жестко соединен с первым цилиндрическим колесом, находящимся в зацеплении со вторым цилиндрическим колесом, которое поворотно установлено на верхней шарнирной оси, связывающей задний поводок с верхней частью сустава, и имеет плечо кривошипа, на котором, по меньшей мере, через одну точку сочленения шарнирно закреплен управляющий элемент.
Другие признаки изобретения являются предметом подчиненных пунктов формулы и поясняются примерами выполнения в связи с другими преимуществами изобретения.
На фиг. 1 показано в схематичном изображении размещенное со стороны сгибания и разгибания верхнее сочленение управляющего элемента, выполненного в виде цилиндра со штоком, в моноцентрическом суставе при помощи цилиндрической зубчатой передачи; на фиг. 2 - размещенное со стороны сгибания верхнее сочленение детально непоказанного управляющего элемента в моноцентрической суставе при помощи планетарной передачи, вид сверху; на фиг. 3 - сечение по линии III - III на фиг. 2; на фиг. 4 - в схематичном изображении выполненный в виде четырехзвенной кинематической цепи полицентрический коленный сустав протеза с управляющим элементом, шарнирно закрепленным диагонально через два двухкривошипных механизма; на фиг. 5 - для управляющего элемента на фиг. 4 - характеристика хода эффективного плеча рычага и момента на суставе в зависимости от угла сгибания колена; на фиг. 6 - общая схема воплощения замысла изобретения; на фиг. 7 - схема на фиг. 6 с примерным указанием действий при расположении верхнего сочленения управляющего элемента со стороны сгибания и разгибания; на фиг. 8 - изображение на фиг. 7 для размещенного со стороны сгибания и разгибания нижнего сочленения управляющего элемента; на фиг. 9 - в схематичном изображении размещенное со стороны сгибания верхнее сочленение соединительной тяги жидкостного амортизатора, выполненного в виде сдвоенного поршневого механизма, в полицентрическом суставе при помощи двухкривошипного механизма; на фиг. 10 -в изображении на фиг. 9 размещенное со стороны сгибания верхнее сочленение управляющего элемента, выполненного в виде цилиндра с поршневым штоком, в полицентрическом суставе при помощи кривошипно-шатунного механизма с наружным толкающим звеном; на фиг. 11 - в изображении на фиг. 10 размещенное со стороны сгибания верхнее сочленение управляющего элемента, выполненного в виде цилиндра с поршневым штоком, в моноцентрическом суставе при помощи кривошипно-шатунного механизма с внутренним толкающим звеном; на фиг. 12 - в изображении на фиг. 11 зависящее от угла сустава, изменяющее свое положение двухстороннее сочленение управляющего элемента, выполненного в виде цилиндра с поршневым штоком для двух моноцентрических суставом при помощи двух одноступенчатых цилиндрических зубчатых передач; на фиг. 13 - моноцентрический коленный сустав протеза с зависящим от угла сустава изменением положения размещенного со стороны сгибания верхнего сочленения детально не показанного управляющего элемента при помощи одноступенчатой цилиндрической зубчатой передачи, вид сверху; на фиг. 14 - разрез по линии XIV-XIV на фиг. 13; на фиг. 15 - полицентрический коленный сустав протеза с зависящим от угла сустава изменением положения размещенного ос стороны сгибания верхнего сочленения соединительной тяги детально не показанного управляющего элемента при помощи одноступенчатой цилиндрической зубчатой передачи, вид сбоку; на фиг. 16 - коленный сустав согласно фиг. 15, вид сверху; на фиг. 17 - коленный сустав согласно фиг. 16, частично в продольном разрезе, в увеличенном масштабе; на фиг. 18 - в качестве уровня техники схематично изображенное сочленение управляющего элемента, выполненного в виде цилиндра с поршневым штоком, в неподвижной позиции сочленения в моноцентрическом суставе; на фиг. 19 -в качестве уровня техники изображенный согласно фиг. 4 полицентрический сустав с двумя неподвижно сочлененными диагональными управляющими элементами, каждый в виде цилиндра с поршневым штоком.
Для лучшего понимания изобретения проблема, лежащая в его основе, поясняется сначала со ссылкой на уровень техники.
Как на левом изображении A, так и на правом изображении B фиг. 18 показан сустав или поворотное соединение, состоящее из верхней части 1 сустава, нижней части 2 сустава и шарнирной оси 3, поворотно соединяющей обе эти части 1, 2 друг с другом и жестко связанной с нижней частью 2 сустава. Речь идет таким образом о моноцентрическом суставе или же моноцентрическом поворотном соединении, изображенном в разогнутой позиции. Кроме того, предусмотрен управляющий элемент 4, образованный в обоих примерах выполнения цилиндром 5 с поршневым штоком 6. Этот изменяющийся по длине управляющий элемент 4 своим верхним концом шарнирно закреплен на верхней части 1 сустава, а своим нижним концом - на нижней части 2 сустава. При этом верхняя точка сочленения обозначена позицией 7, а нижняя точка сочленения - позицией 8.
На левом изображении A верхняя точка сочленения 7 лежит на стороне сгибания сустава и тем самым позади его шарнирной оси 3, а на правом изображении B эта точка находится на стороне разгибания сустава и тем самым перед шарнирной осью 3. Управляющий элемент 4 находится таким образом своей продольной осью на левом изображении А в целом на стороне сгибания, а на правом изображении В - на стороне разгибания. В результате этого начало сгибания сустава, например путем поворота верхней части 1 в направлении стрелки назад, приводит в варианте выполнения согласно А к уменьшению расстояния между обеими точками сочленения 7, 8 и движению поршневого штока 6 вовнутрь цилиндра 5, а такое же сгибание в варианте выполнения В ведет к увеличению расстояния между обеими точками сочленения 7, 8, то есть к выдвижению поршневого штока 6 из цилиндра 5.
Позиция верхней точки сочленения 7 на верхней части 1 сустава по отношению к шарнирной оси 3 является определяющей для того, чтобы сторона сочленения управляющего элемента 4 при продолжении сгибания сустава поменялась в конструктивно возможном диапазоне, т.е. чтобы продольная ось управляющего элемента 4 в варианте выполнения согласно А перешла из позиции за шарнирной осью 3 в позицию перед этой шарнирной осью или чтобы продольная ось управляющего элемента 4 варианте выполнения согласно В из позиции перед шарнирной осью 3 перешла в позицию позади этой шарнирной оси 3. Когда наступает соответствующая смена, то одновременно меняется и направление поступательного движения поршневого штока 6 к цилиндру 5, и тем самым направление его действия в этом положении после предыдущей остановки или же предыдущего прохождения через нуль (ниже обозначено как реверсирование действия "WU"). В зависимости от функции управляющего элемента 4 это может приводить к различным воздействиям на сустав: упруго-амортизирующая система, противодействующая движению сустава вплоть до достижения границы "WU", поддерживает его после перехода границы "WU". Возможна, разумеется, и обратная последовательность действий.
Система, задерживающая движение, после перехода границы "WU" также может оказывать различные воздействия на сустав: при функционировании в обоих направлениях движения эта задерживающая движение система (управляющий элемент) будет и дальше противодействовать движению сустава, при известных условиях с различной характеристикой сопротивления. При функционировании только в одном направлении движения управляющий элемент становится неэффективным, причем, как и в упруго-амортизирующей системе, в этом случае также возможна обратная последовательность действий.
Такое реверсирование действия наступает в зависимости от позиции верхней точки сочленения 7 на верхней части 1 сустава (по отношению к шарнирной оси 3) при различных углах сгибания всякий раз, тогда, когда продольная ось управляющего элемента 4 пересекает шарнирную ось 3. Это происходит для четырех показанных на чертеже точек a, b, c, и d в обоих вариантах выполнения A и B примерно при следующих углах сгибания: 45o для a, 90o для b, 35o для c и 80o для d. В моноцентрических коленных суставах протезов из этих возможностей сочленения для управляющих элементов 4, шарнирно закрепленных со стороны сгибания и разгибания, имеют значение практически только варианты сочленения b и c, причем предпочтение оказывается, как правило, варианту b с реверсированием действия примерно при 90o. Если в цилиндре 5 установлен упругий элемент, который с началом сгибания сустава натягивается из положения разгибания, то реверсирование его действия в конечном суставе протеза при угле сгибания около 90o облегчает сидение ампутированного, поскольку разгибающее действие натянутого упругого элемента на голень при этом угле равно нулю и при превышении угла меняется на противоположное, т.е. поддерживает положение разгибания.
Тем не менее вариант сочленения b частично связан с существенными недостатками: позиция верхней точки сочленения 7 по отношению к шарнирной оси 3 имеет решающее влияние на количество и характер поступательного движения поршневого штока 6 относительно цилиндра 5, в зависимости от угла сгибания сустава. Кроме того, указанная позиция определяет характер вертикального расстояния f продольной оси управляющего элемента 4 от шарнирной оси 3 в зависимости от угла сгибания сустава. Это расстояние f является мерилом для эффективного плеча рычага, на котором передаются усилия между управляющим элементом 4 и суставом, действующие, например, как коленный момент.
К уровню техники на фиг. 19 показан полицентрический сустав или же полицентрической поворотное соединение в виде четырехзвенной кинематической шарнирной цепи, в которой верхняя часть 1 сустава соединена с нижней частью 2 сустава через передний (со стороны разгибания) поволок 9 и задний (со стороны сгибания) поводок 10. Показаны два различных, диагонально шарнирно закрепленных управляющих элемента 4 а и 4 b, причем речь идет о прямом или непосредственном сочленении между двумя соседними звеньями одного сустава. При этом расположение управляющего элемента 4 а приблизительно соответствует экзартикуляционному коленному суставу согласно патенту. Для относительных движений между цилиндром и поршневым штоком с началом движения сгибания сустава из положения разгибания действительны соответствующие вышеприведенные разъяснения на фиг. 18, с той разницей, что для направления этих относительных движений определяющим является не положение соединительной прямой, представляющей собой продольную ось управляющего элемента 4, с ее точками сочленения по отношению к шарнирной оси, а положение по отношению к мгновенному центру IC движения сустава.
Конфигурация для управляющего элемента 4a, равно как и конфигурация для управляющего элемента 4b, имеют недостатки в нескольких аспектах: максимальное значение эффективного плеча рычага f наступает уже в положении разгибания. Максимальный ход Hмакс не очень велик. Реверсирование действия при использовании в качестве коленного сустава протеза или тазобедренного сустава протеза наступает для конфигурации B при около 30o, а для конфигурации A при около 70o и тем самым слишком рано, т.е. при слишком малых углах сгибания.
Для решения этих проблем, рассмотренных выше по уровню техники, служат описанные ниже примеры осуществления изобретения.
На фиг. 1 показаны изображения, аналогичные фиг. 18. Здесь также изображены два моноцентрических сустава, включающих верхнюю часть 1 сустава, нижнюю часть 2 сустава, шарнирную ось 3 и управляющий элемент 3, также образованный цилиндром 5 с поршневым штоком 6. На левом изображении А управляющий элемент установлен в соответствии с фиг. 18 А со стороны сгибания, а на правом изображении В в соответствии с фиг. 18 со стороны разгибания. Верхняя точка сочленения управляющего элемента 4 также обозначена ссылочной позицией 7, а ве нижняя точка сочленения - позицией 8.
Однако, согласно изобретению, верхняя точка 7 сочленения установлена относительно верхней части 1 сустава (сочленяемого звена сустава) с возможностью изменения своего положения и соединена с нижней частью 2 сустава через механическую принудительную связь. При этом механическая принудительная связь согласно фиг. 1 выполнена в виде одноступенчатой цилиндрической зубатой передачи, в которой первое цилиндрическое колесо 11 жестко установлено на шарнирной оси 3, жестко связанной с нижней частью 2 сустава, и находится в зацеплении со вторым цилиндрическим колесом 12,установленным с возможностью свободного вращения на дополнительной оси вращения 13 на верхней части 1 сустава и имеющим плечо кривошипа 14, на котором через свою верхнюю точку сочленения 7 шарнирно закреплен управляющий элемент 4. На левом изображении А ось вращения 13 второго цилиндрического колеса 12 расположена над шарнирной осью 3, а в варианте выполнения В - перед шарнирной осью 3.
При движении сгибания нижней части 2 сустава в направлении стрелки второе цилиндрическое колесо 12 совершает вращательное движение, всегда направленное навстречу этому движению сгибания. Верхняя точка сочленения 7 управляющего элемента описывает при этом поворот вдоль направленной примерно равными частями назад и вниз и проходящей вокруг шарнирной оси 3 круговой траектории, которая содействует сокращению расстояния между обеими точками сочленения 7, 8 управляющего элемента 4 с началом сгибания колена из положения разгибания, и тем самым увеличению хода на управляющем элементе 4. Достигаемый при этом угол поворота зависит только от передаточного отношения пары сопряженных цилиндрических зубчатых колес 11, 12 и поэтому свободно выбирается как и радиус сочленения плеча кривошипа 14.
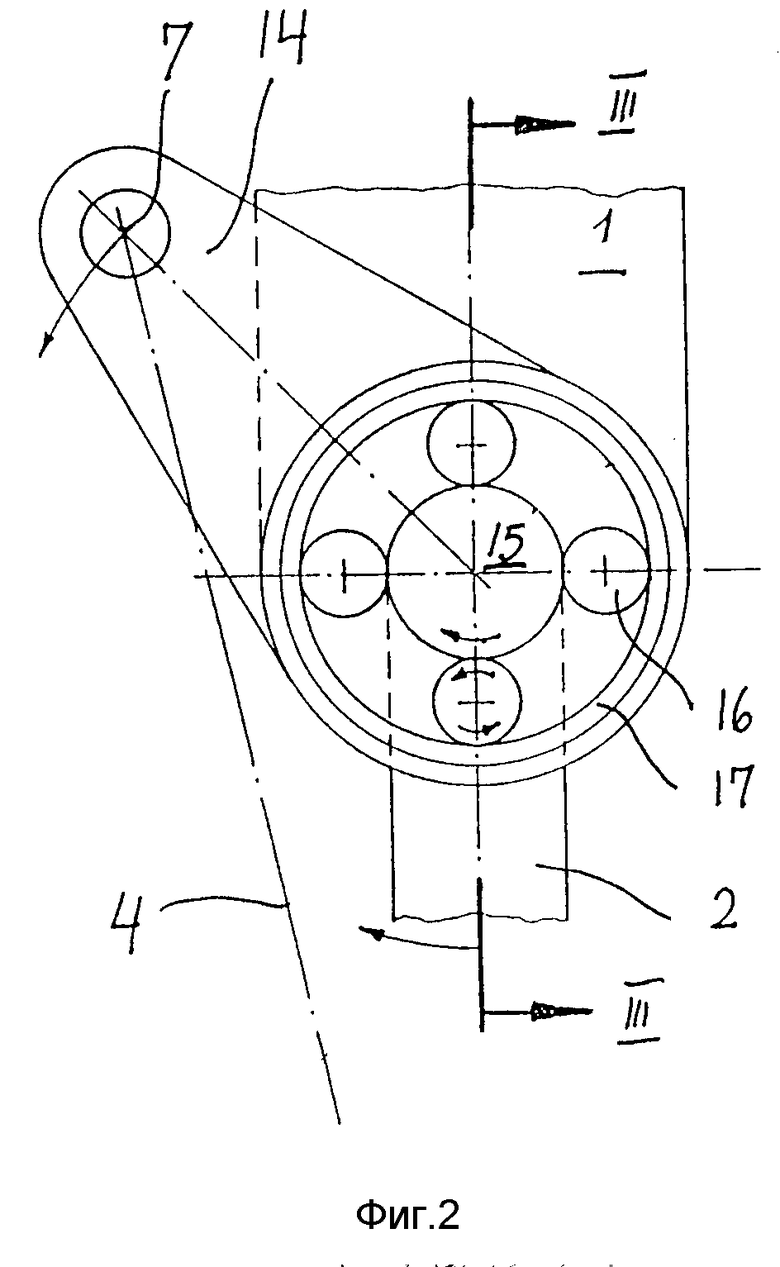
В примере выполнения согласно фиг. 2 предложенная механическая принудительная связь между точкой сочленения 7 и нижней частью 2 сустава осуществляется посредством установленной коаксиально шарнирной оси 3 планетарной передачи, в которой центральное солнечное колесо 15 связано с нижней частью 2 сустава, а водило планетарных колес 16 - с верхней частью 1 сустава. При такой компоновке наружная коронная шестерня совершает вращательное движение, всегда направленное навстречу движению сгибания верхней части 2 сустава. Плечо кривошипа 14, соединенное с наружной коронной шестерней 17, несет на своем конце верхнюю точку сочленения 7 управляющего элемента 4. Эта верхняя точка сочленения 7 описывает при указанном движении сгибания поворот вдоль направленной незначительно назад и преимущественно вниз и проходящей концентрично шарнирной оси 3 круговой траектории, которая содействует сокращению расстояния между обеими точками сочленения управляющего элемента 4 с началом сгибания колена из положения разгибания и тем самым увеличению хода на управляющем элементе. Достигаемый при этом угол поворота зависит только от передаточного отношения между коронной шестерней 17 и солнечной шестерней и поэтому свободно выбирается как и радиус сочленения плеча кривошипа 14.
На фиг. 4 показан видоизмененный согласно изобретению вариант полицентрического сустава, изображенного в качестве уровня техники на фиг.19, представляющий собой четырехзвенную кинематическую шарнирную цепь, состоящую из верхней части 1 сустава, нижней части 2 сустава, переднего поводка 9 и заднего поводка 10. Управляющий элемент 4, подвешенный по диагонали между верхней точкой сочленения 7 и нижней точкой сочленения 8,показан лишь схематично штрих-пунктирной линией. Продольная ось управляющего элемента 4 проходит таким образом сзади сверху вперед вниз. Сочленение осуществляется через двухкривошипный механизм. Верхний двухкривошипный механизм 18 шарнирно соединен через свою соединительную тягу 19 с передним поводком 9 под передним верхним шарниром 20 основной механики и приводит в действие установленный коаксиально заднему верхнему шарниру 21 основной механики и направленный вверх рычаг 22 через шарнир, по отношению к которому верхняя точка сочленения 7 управляющего элемента 4 расположена коаксиально.
Соединительная тяга 23 нижнего двухкривошипного механизма 24 шарнирно соединена с удлиненным вниз задним поводком 10 под задним нижним шарниром 25 основной механики и приводит в действие установленный коаксиально переднему нижнему шарниру 26 основной механики коленчатый рычаг 27, на противоположном конце которого находится нижняя точка сочленения 8 управляющего элемента 4.
Для сравнения на фиг. 4 также штрих-пунктирной линией показан управляющий элемент 4 а, изображенный на фиг. 19 по уровню техники.
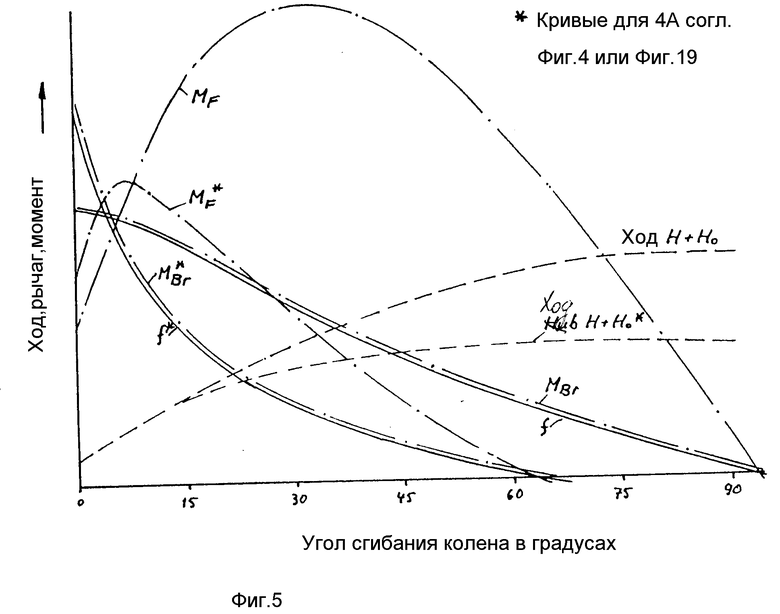
Характеристики хода, рычага и момента показаны на фиг. 5 для угла сгибания колена коленного сустава на фиг. 4. На фиг. 5 ясно видно, что все изображенные величины в сравнении с показанными на чертеже кривыми для известного сустава на фиг. 19 оказываются заметно более благоприятными. Реверсирование действия смещено от положения сгибания, составляющего примерно 60o и слишком незначительного для коленного сустава протеза, в сторону целесообразного положения сгибания, равного примерно 90o. Расчетно-эффективное общее плечо рычага имеет существенно более благоприятную характеристику. Ход "H" значительно усилен по сравнению с эталонной величиной и имеет при максимальном значении сгибания сустава около 90o целесообразную характеристику. Момент Mf от действия упругого элемента 4 за счет увеличения хода при больших углах сгибания и за счет более благоприятной характеристики расчетно-эффективного общего плеча рычага значительно усилен по всему диапазону сгибания и достигает своего максимума явно позже, чем самая неблагоприятно протекающая эталонная величина. Момент MB от действия задерживающего движения элемента подчинен, будучи пропорционально зависимым, характеристике расчетно-эффективного общего плеча рычага. Поэтому соответствующие рассуждения здесь действительны по смыслу.
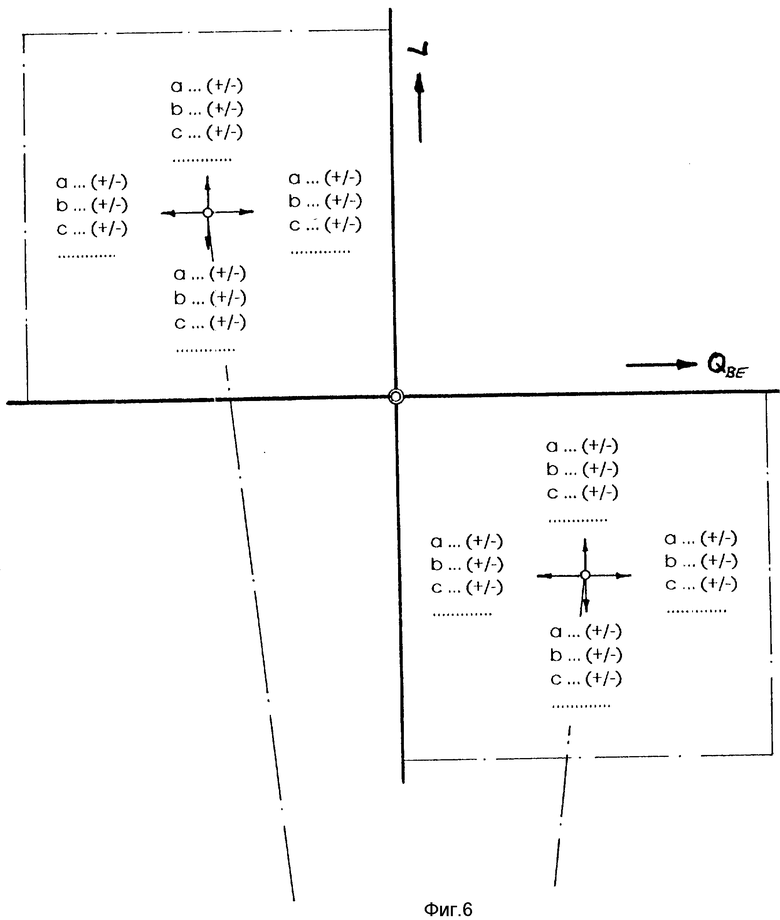
С целью лучшего обзора разнообразных возможностей в отношении сочленения управляющего элемента целесообразно для характеристики траектории предусмотренного изобретением и зависящего от угла сустава изменения положения верхней точки сочленения управляющего элемента относительно сочленяемого звена сустава провести дифференцирование по отдельным характерным компонентам траектории. Для этого можно воспользоваться ориентированием по продольной оси ортопедически-технического вспомогательного средства, тем более, что те ортопедические протезы и ортезы, в которых может найти применение замысел изобретения, как правило, имеют продольную ось, отнесенную к их основному или исходному положению в пределах опорно-двигательного аппарата человека. Если последовать такому ориентированию, то наиболее подходящей оказывается декартова система координат, ордината которой обозначается как L (продольная ось), а абсцисса как QBE(поперечная ось в плоскости движения). Положительная ось L указывает вверх, а положительная ось QBE - в сторону разгибания сустава. Начало координат устанавливается в моноцентрических типах суставов в центре сустава, а в полицетрических суставах - в целесообразной точке отсчета (например, в центре нескольких значимых шарнирных осей).
Если в эту систему отсчета включить подлежащую построению или оценке характеристику траектории предусмотренного согласно изобретению и зависящего от угла сустава изменения положения сочленения управляющих элементов в составах ортопедических протезов и ортезов, то можно относительно легко с помощью действий в направлениях L и QBE определить наиболее целесообразную для заданных функциональных требований характеристику траектории сочленения в зависимости от угла сустава, или же можно компоненты L и QBE известных характеристик траекторий, проходящие параллельно и в плоскости движения поперек к продольной оси, соотнести с отдельными действиями, либо последние свести к определенным компонентам траектории.
Это показано на фиг. 6 в общем виде, а на фиг. 7 - специально в качестве примера для размещенного со стороны сгибания и разгибания верхнего сочленения детально не показанного управляющего элемента в моноцентрическом коленном суставе протеза В обоих случаях точки сочленения расположены в типичном квадрате. Для тазобедренного сустава протеза действительны те же самые взаимосвязи. Изображения показывают, какие действия достигаются по отдельности или в сочетании, если соответствующая рассматриваемая точка сочленения перемещается в зависимости от движения сустава вдоль намеченной или заданной траектории изменения положения с началом сгибания колена из положения разгибания.
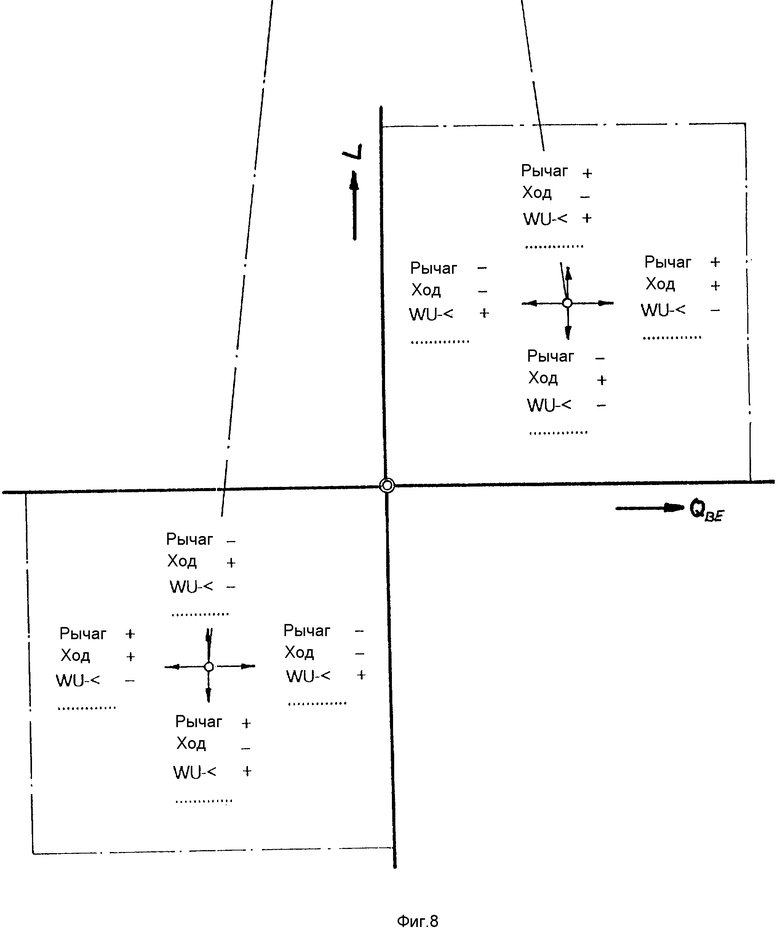
Для полной ясности взаимосвязи, показанные на фиг. 7 для размещенного со стороны сгибания и разгибания верхнего сочленения детально не показанного управляющего элемента в моноцентрическом коленном суставе протеза, повторены на фиг. 8 для нижнего сочленения, размещенного со стороны сгибания и разгибания.
Последующие фигуры показывают другие варианты осуществления изобретения.
На фиг. 9 показан полицентрический сустав с верхним двухкривошипным механизмом 18 согласно фиг. 4. На верхней точке сочленения 7 со стороны сгибания шарнирно закреплена соединительная тяга 28 жидкостного амортизатора, выполненного в виде сдвоенного поршневого механизма.
На фиг. 10 показано зависящее от угла сустава изменение положения размещенного со стороны сгибания верхнего сочленения управляющего элемента и выполненного в виде цилиндра 5 с поршневым штоком 6 в полицентрическом суставе при помощи кривошипношатунного механизма 30 с наружными толкающим звеном.
На фиг. 11 показано зависящее от угла сустава изменение положения размещенного со стороны сгибания верхнего сочленения управляющего элемента 4, выполненного в виде цилиндра 5 с поршневым штоком 6, в моноцентрическом суставе при помощи кривоширношатунного механизма 31 с внутренним толкающим звеном.
На фиг. 12 показано зависящее от угла сустава, изменяющее свое положение двухстороннее сочленение управляющего элемента 4, выполненного в виде цилиндра 5 с поршневым штоком 6, для двух моноцентрических суставов при помощи двух одноступенчатых цилиндрических зубчатых передач.
На фиг. 13 и 14 показан моноцентрический коленный сустав протеза с зависящим от угла сустава изменением положения размещенного со стороны сгибания верхнего сочленения 7 детально не показанного управляющего элемента 4 при помощи одноступенчатой цилиндрической зубчатой передачи. Здесь нижняя часть 1 сустава соединена с установленным на шарнирной оси 3 первым цилиндрическим колесом 11, в результате чего последнее в показанном положении поворачивается с началом движения сгибания сустава из положения разгибания за счет поворота нижней части 2 сустава по часовой стрелке и приводит в движение находящееся с ним в зацеплении второе цилиндрическое колесо 12 против часовой стрелки вокруг оси вращения 13, установленной со стороны сгибания сустава за его шарнирной осью 3. В одном направлении со вторым цилиндрическим колесом 12 поворачивается его плечо кривошипа 14 и находящаяся на нем верхняя точка сочленения 7. При этом соотношение диаметров делительной окружности пары зубчатых колес, образованной обоими цилиндрическими колесами 11, 12, выбрано так, что при величине угла сгибания колена 90o в управляющем элементе 4 наступает реверсирование действия.
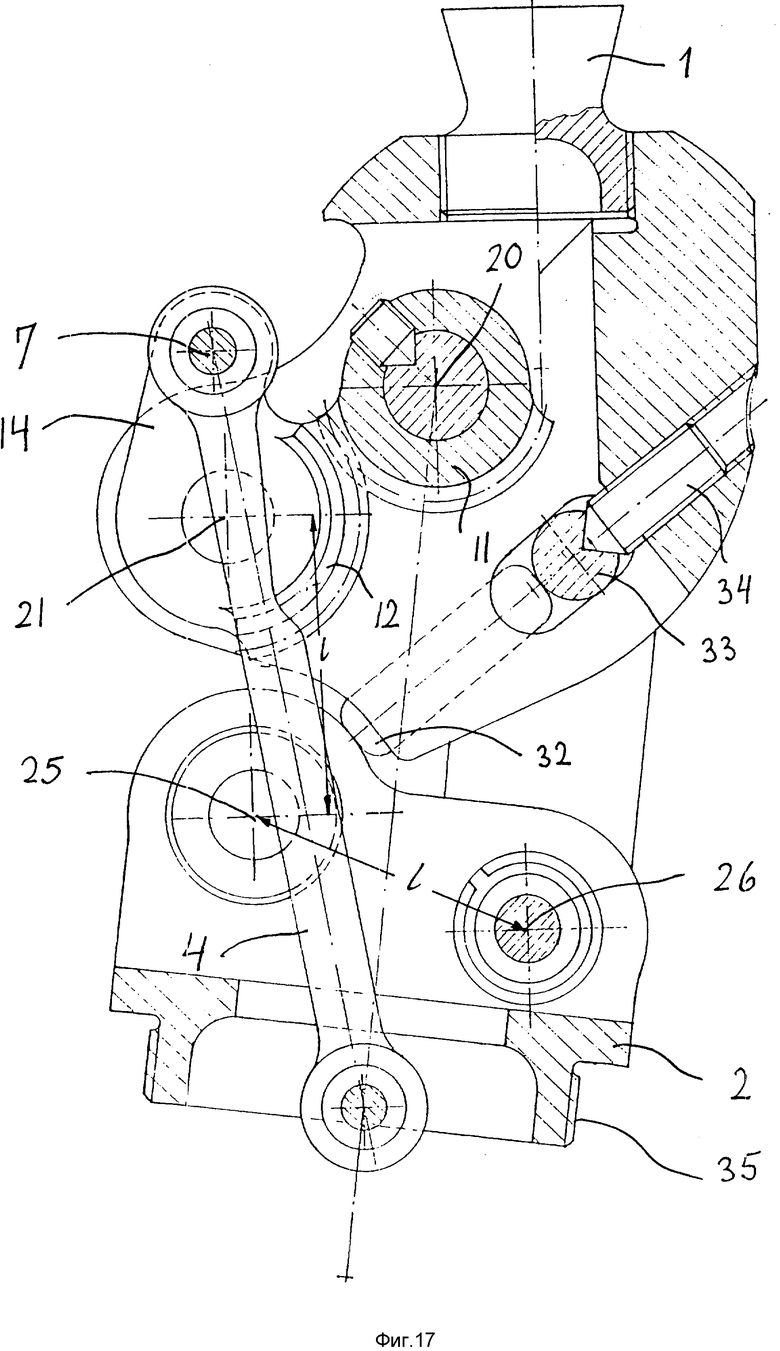
В полицентрическом коленном суставе протеза, схематично изображенном на фиг. 15, 16 и 17, для механической принудительной связь между изменением положения верхней точки сочленения 7 управляющего элемента 4 в верхней части 1 сустава и движением сустава, выполненного в виде четырехзвенной кинематической цепи, также служит одноступенчатая цилиндрическая зубчатая передача. При этом передний поводок 9 в своем переднем верхнем шарнире 20 соединен с установленным на его оси первым цилиндрическим колесом 11, которое с началом движения сгибания сустава поворачивается за счет поворота переднего поводка 9 относительно своего переднего верхнего шарнира 20 по часовой стрелке и приводит в движение находящееся с ним в зацеплении второе цилиндрическое колесо 12 против часовой стрелки вокруг его оси, установленной коаксиально заднему верхнему шарниру 21 между верхней частью 1 сустава и задним поводком 10, причем плечо кривошипа 14 движется в одном направлении с верхней точкой сочленения.
Соотношение диаметров делительной окружности зубчатой пары, образованной цилиндрическими колесами 11, 12, выбрано так,что при величине угла сгибания сустава 30o в управляющем элементе 4 наступает реверсирование действия.
Особенно благоприятным в этом варианте выполнения полицентрического сустава является довольно большой угол сгибания колена, составляющий около 180o. Этот угол становится возможным потому, что верхнее сочленение 7 из своей мешающей при этом позиции разгибания по мере сгибания колена поворачивается вдоль круговой траектории вокруг своей поворотной оси назад вниз и перестает быть помехой.
Конструктивные и функциональные преимущества этого варианта выполнения проявляются тогда, когда в положении разгибания верхняя шарнирная ось 20 переднего поводка 9 находится выше верхней шарнирной оси 21 заднего поводка 10, а задняя шарнирная ось 26 переднего поводка 9 находится ниже нижней шарнирной оси 25 заднего поводка 10, и когда расстояние между обеими шарнирными осями 21, 25 заднего поводка 10 соответствует расстоянию l между обеими шарнирными осями 25, 26 нижней части 2 сустава.
Благоприятно также, когда положение разгибания определяется упором, действующим непосредственно между верхней частью 1 сустава и нижней частью 2 сустава. При этом упор состоит согласно фиг. 17 из двух параллельных друг другу и проходящих в обеих щеках верхней части сустава упорных буферов 32, на которые через общую траверсу 33 воздействует установочный винт 34. Особое преимущество этого конструктивного решения следует усматривать в том, что при упоре нижней части 2 сустава в один или оба упорных буфера 32 не оказывается никаких изгибающих моментов, в частности, на передний поводок 9. Кроме того, упорные буферы могут быть установлены в верхней части 1 сустава, выполненной в виде массивной детали.
Для дистального присоединения частей протеза посредством разъемного соединения благоприятно, когда верхняя часть 2 сустава имеет для присоединения частей протеза разъемной соединение в виде мелкой резьбы 35. Благодаря этому сустав может комбинироваться с любыми узлами несущей структуры голени с включенным в нее управляющим элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ВЗАИМНО ПОВОРОТНОГО СОЧЛЕНЕНИЯ ЧАСТЕЙ ОРТОПЕДИЧЕСКОГО АППАРАТА | 1995 |
|
RU2113192C1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕННЫМ СОЧЛЕНЕНИЕМ ПРОТЕЗА НОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2089138C1 |
| ПРОТЕЗНЫЙ СУСТАВ | 1994 |
|
RU2112465C1 |
| ОРТЕЗ КОЛЕННОГО СУСТАВА | 1995 |
|
RU2107476C1 |
| ТОРМОЗНОЕ КОЛЕННОЕ СОЧЛЕНЕНИЕ ДЛЯ ПРОТЕЗА НОГИ | 1996 |
|
RU2141290C1 |
| ПРОТЕЗ КОЛЕННОГО СУСТАВА | 2011 |
|
RU2569027C2 |
| ТОРМОЗНОЕ СОЧЛЕНЕНИЕ ПРОТЕЗА | 1996 |
|
RU2141291C1 |
| ОРТЕЗ СТОПЫ | 1995 |
|
RU2142759C1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| ШАРНИРНОЕ СОЕДИНЕНИЕ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1991 |
|
RU2050155C1 |













Изобретение относится к ортопедии и может быть использовано в протезостроении в ортопедических протезах и ортезах. Технический результат заключается в возможности функциональных элементов самостоятельно генерировать движения, что расширяет функциональные возможности протезов и ортезов. Изобретение содержит верхнюю часть сустава, нижнюю часть сустава, промежуточные поводки, управляющий элемент, действующий с двух сторон через отнесенную от шарниров оси. Согласно изобретения, по меньшей мере, одна из точек сочленения установлена с возможностью изменения положения по отношению к ее сочленяемому звену сустава и кинематически соединена через механическую принудительную связь, по меньшей мере, с одним другим звеном сустава. 18 з.п. ф-лы, 19 ил.
| DE, патент, 2841999, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| EP, патент, 0010177, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |

