Изобретение относится к созданию устройства для осуществления взаимно поворотного соединения частей ортопедического аппарата, такого, как, в частности, коленного протеза для людей с ампутированной ногой, содержащего систему кинематической множественной связи с по меньшей мере четырьмя тягами, смежные тяги которой имеют общие оси поворота, причем оси поворота располагаются главным образом взаимно параллельно.
Использование систем множественной связи для замены или поддержания (функции) сустава в ортопедическом аппарате известно в течение длительного времени и часто применяется благодаря преимуществам, которыми обладает такая система по сравнению с более привычными механизмами с одной фиксированной точкой поворота. Среди прочего эти преимущества включают в себя лучшее воспроизведение или имитирование естественного движения конечностей по сравнению с одноосным механизмом и повышенную и лучше управляемую стабильность (устойчивость) механизма, когда он нагружен; эти преимущества достигаются соответствующим выбором размеров и взаимного расположения тяг системы. Это последнее соображение (относительно устойчивости) имеет большое значение, особенно в случаях использования системы множественных связей для замены или поддержания функции колена. Основным при начале шагового движения, когда механизм распрямлен (вытянут), пятка касается земли и механизм нагружен весом пользователя, является обеспечение того, чтобы механизм не начинал поворачиваться немедленно, так как пользователь в таком случае не будет иметь опоры и упадет. Подобная ситуация в одноосном механизме может быть предотвращена только применением сложного и не очень надежного тормозного механизма. С другой стороны, в системе множественной связи это свойство может быть достигнуто выбором такой геометрии, что в вытянутом положении механизма его фактический центр вращения, вокруг которого осуществляется поворот нижней части ноги или протеза, лежит позади линии, которая соединяет две нагруженные точки (пятку и тазобедренный сустав).
При соответствующем выборе геометрии системы множественной связи можно, более того, добиться такого расположения фактического центра вращения в конце шагового движения, что протез или ортопедический аппарат будут переведены более простым образом по сравнению с одноосным механизмом в прямое поворотное движение. Более высокая устойчивость, достигаемая при начале шагового движения, простота генерации движения поворота назад и возможность нахождения при помощи простых средств хорошего компромисса между указанными двумя свойствами делают систему множественной связи чрезвычайно подходящей для замены или поддержания функции сустава.
Важной предпосылкой использования системы кинематической множественной связи в таких применениях является то, что в ней аналогично человеческому колену проявляется начальное сжимающее движение сгиба. Среди прочего результатом этого является наличие небольшого начального сжимающего движения сгиба, которое создается и в реальном суставе под нагрузкой. Демпфирующее влияние сустава при нахождении ноги под нагрузкой предотвращает развитие тряски, которая может быть неприятной и при длительном воздействии даже болезненной для пользователя. Начальное движение сгиба под нагрузкой, кроме того, снимает ограничение вертикального движения (перемещения) центра тяжести тела, в то время как требуемая для ходьбы энергия остается ограниченной. Этот сгиб (движение сгиба) колена называется "позицией флексии (сгибания)".
Существующие в настоящее время устройства для взаимного поворотного сочленения частей ортопедического аппарата, в особенности такого, как коленный протез для лиц с ампутацией ноги, имеют позицию флексии, ограниченную 3-4o. Это слишком мало для полной реализации указанных преимуществ позиции флексии. Другое ограничение связано с тем, что соединительная точка протеза смещена слишком далеко назад. В частности, для случая так называемой экзартикуляции колена (ампутации ноги в коленном суставе, когда верхняя часть ноги полностью сохраняется от коленного сустава) это приводит к недопустимо большому смещению протеза назад.
Целью изобретения является создание устройства, в котором может быть осуществлена такая позиция флексии, которая достаточно велика для осуществления возможности естественной ходьбы и в котором при одном движении (в позиции флексии) блокируется другое движение (поворот флексии). Другой целью изобретения является создание устройства, в котором возможно сместить вперед в достаточной степени соединительную точку ортопедического аппарата, в частности, для случая экзартикуляции колена. Еще одной целью изобретения является создание простого по конструкции и надежного при использовании устройства.
Для осуществления указанных задач в изобретении предлагается устройство, отличающееся тем, что одна тяга шарнирно соединена только с одной верхней выходной тягой и с одной нижней выходной тягой и одна тяга, при движении ходьбы размещенная позади указанной тяги, шарнирно соединена с одной стороны с верхней выходной тягой и с другой стороны с нижней выходной тягой таким образом, что при повороте устройства эта задняя тяга осуществляет движение сжатия относительно нижней выходной тяги, причем это движение содержит как поступательное перемещение, так и вращение. Такое устройство обеспечивает желательные функциональные свойства и относительно широкую позицию флексии в сочетании с предотвращением движения второй степени свободы при осуществлении устройства простыми средствами.
Предпочтительный вариант осуществления устройства отличается тем, что задняя тяга соединена с нижней выходной тягой с промежуточным введением по меньшей мере одной соединительной тяги, при этом соединительная тяга шарнирно соединена как с задней тягой, так и с нижней выходной тягой.
Другой предпочтительный вариант осуществления изобретения отличается тем, что задняя тяга соединена с нижней выходной тягой с промежуточным введением двух соединительных тяг, в то время как обе соединительные тяги шарнирно соединены как с задней тягой, так и с нижней выходной тягой, при этом тяги образуют так называемую шестисвязную систему Стефенсона. В этом простом устройстве с двумя соединительными тягами задняя тяга может осуществлять сжимающее вращение и поступательное движение без дополнительных фаз. В устройстве с одной соединительной тягой необходима одна дополнительная фаза для получения сжимающего вращения и поступательного движения.
Другой предпочтительный вариант осуществления изобретения отличается тем, что задняя тяга соединена с промежуточным введением по меньшей мере одной трехсвязной системы с нижней выходной тягой, причем указанная трехсвязная система содержит тягу, которая шарнирно соединена с задней тягой и шарнирно подключена в двух точках к двум соединительным тягам, которые обе шарнирно соединены с нижней выходной тягой. Еще один предпочтительный вариант осуществления изобретения отличается тем, что задняя тяга соединена с промежуточным введением двух трехсвязных систем с нижней тягой. Эти варианты изобретения, в которых соединительные тяги заменены трехсвязной системой, относятся к п. 2 и 3 формулы изобретения.
Еще один предпочтительный вариант осуществления изобретения отличается тем, что задняя тяга соединена при помощи по меньшей мере одного соединения штифт/паз с нижней выходной тягой. Специфический вариант такого осуществления изобретения образован при подключении задней тяги при помощи двух соединений штифт/паз к нижней выходной тяге. В таких устройствах соединительная тяга, которая, например, применена в устройствах по п. 2 и 3 формулы изобретения, или трехсвязная система, которая применена в устройствах по п.4 и 5, заменены соединением штифт/паз. При таком осуществлении изобретения задняя тяга также может осуществлять сжимающее вращение и поступательное движение.
Предпочтительный вариант осуществления изобретения отличается тем, что по меньшей мере одна из тяг выполнена в виде множества тяг (дублируется). Эти множественные тяги увеличивают устойчивость устройства.
Предлагаемое устройство преимущественно содержит по меньшей мере один установленный с применением пружины элемент, который соединен по меньшей мере с двумя тягами. Предпочтительный вариант осуществления такого пружинного элемента содержит демпфер. Пружина может быть использована, например, для облегчения переноса вперед нижней части ноги в конце фазы поворота. Демпфер может быть использован, например, для рассеивания энергии на этапе поворота.
На фиг.1 показан вид сбоку протеза для лиц с ампутацией ноги; на фиг.2 - вид в перспективе, с частичным вырывом, части устройства, показанного на фиг. 1; на фиг.3-9 - схематические изображения шестисвязной системы, соответствующей изобретению; на фиг.10 - альтернативная система связи, снабженная двумя соединениями штифт/паз; на фиг.11 - другая альтернативная система связи, снабженная десятью тягами.
На фиг.1 изображен протез 1 для лиц с ампутацией ноги, в котором система связи 2 выполняет функцию коленного сустава. Кроме того, протез 1 содержит искусственную нижнюю часть ноги 3 с искусственной стопой 4 и средства 5 для крепления протеза 1 к культе ноги пациента.
На фиг.2 приведено детальное изображение системы связи. Шестисвязная система 2, изображенная на этом чертеже, образована верхней выходной тягой 6, которая присоединена к средствам 5 для крепления протеза 1 к культе ноги, нижней выходной тягой 7, которая присоединена к искусственной нижней части ноги 3, тягой 8, которая шарнирно соединена только с указанными тягами 6, 7, задней (тыльной) тягой 9, расположенной относительно направления ходьбы позади тяги 8, причем тяга 9 шарнирно соединена с верхней выходной тягой 6 и двумя соединительными тягами 10, 11, которые обе шарнирно подсоединены к задней тяге 9 и к нижней выходной тяге 7. Соединительные тяги 10, 11 сдвоены для достижения большей устойчивости системы связи 2. На чертеже показана также пружина 12 для осуществления более легкого переноса вперед искусственной нижней части ноги 3. Тяга 8 снабжена фронтальной частью 13, имеющей форму коленной чашечки, для придания ей такого же внешнего вида, что и у человеческого колена. Функционирование этой системы связи будет пояснено далее.
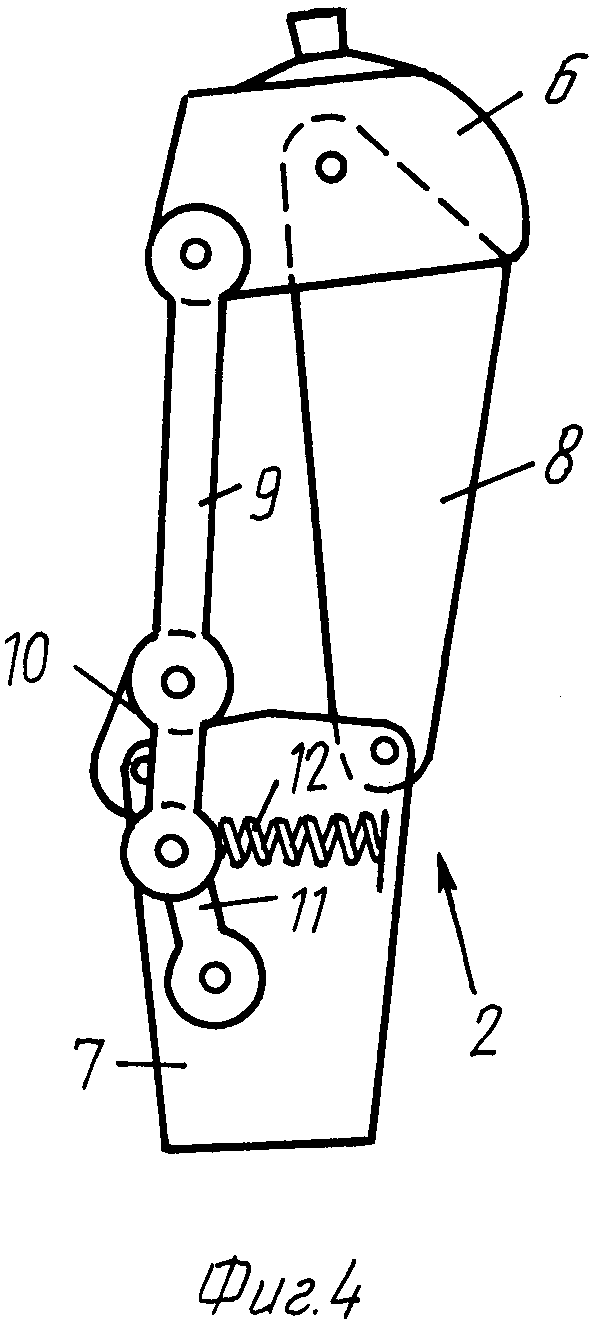
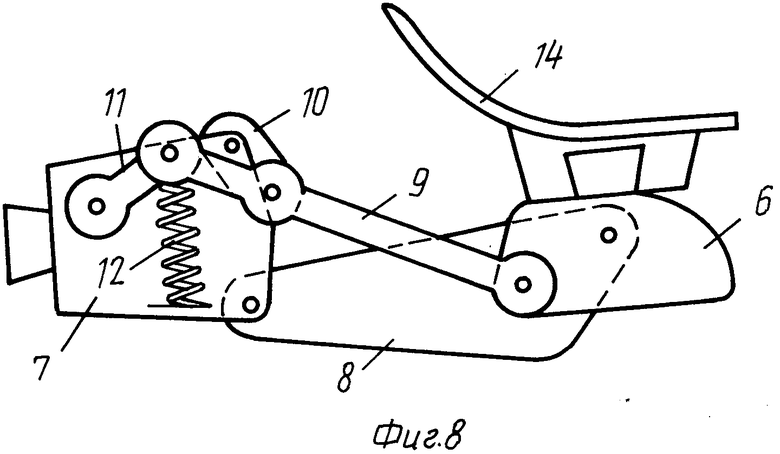
На фиг.3-5 схематически показан вид сбоку системы 2 фиг.2. Показанное на фиг.3 положение является исходным (стартовым). В этом положении система связи 2 не нагружена (протез 1 не поддерживает культю ноги) и протез 1 располагается на одной линии с культей ноги ("нога" вытянута). Нижняя часть задней тяги 9 расположена в исходном положении в самой высокой точке своего движения. На фиг.4 показана система связи 2 в исходном положении при нормальном сгибе колена, так называемая "флексия поворота". Нижняя часть задней тяги 9 перемещена в нижнем направлении и влево относительно положения фиг.1. Это перемещение имеет место в противоположном от смещения пружиной 12 направлении, при этом сила, приложенная к системе связи, такой, как система связи 2, стремится возвратить ее в исходное положение, если к ней не прикладывается внешняя сила. На фиг.5 приведена система связи 2 в начале фазы стояния, которая, начиная от контакта пяткой и в течение фазы стояния именуется так называемой позицией флексии. Эта позиция обеспечивает среди прочего поглощение ударов и естественный характер ходьбы. На этом чертеже показано начало позиции флексии. Нижняя часть задней тяги 9 переместилась в направлении вниз и вправо относительно показанного на фиг.3 положения.
На фиг.6 показана система связи 2 в позиции флексии, продолженной далее показанного на фиг. 5 состояния. На фиг.6 показан также бандаж 14, который делает систему связи 2 особенно желательной для использования пациентами с экзартикуляцией колена. Экзартикуляцией колена именуется ампутация ноги, заканчивающаяся точно в коленном суставе. На фиг.7 показана система связи 2 с бандажем 14 в положении поворота флексии, на этапе продолжения поворота флексии, изображенного на фиг.4. На фиг.8 показана та же система связи 2 на этапе дальнейшего продолжения поворота флексии относительно фиг.7. На фиг.9 изображена система связи 2 в положении максимального сгиба. В показанных на фиг. 8 и 9 положениях сильно продвинутой флексии поворота четко видно, что тяга 8 функционирует как "коленная чашечка". Система связи 2 выполнена таким образом, что она может даже поддерживаться тягой 8, не испытывая от этого неблагоприятного воздействия. Это имеет место, например, при вставании на колени.
На фиг.10 показана альтернативная система связи 28 в исходном положении. Нижняя выходная тяга 7 снабжена пазами 15, 16, которые взаимодействуют со штырями 17, 18, которые в свою очередь закреплены на нижней части задней тяги 9. При повороте системы связи 28 задняя тяга 9 будет осуществлять движение сжатия относительно нижней выходной тяги 7, так как штифты 17, 18 перемещаются в пазах 15, 16.
На фиг.11 показан другой соответствующий изобретению альтернативный вариант осуществления системы связи 19. В показанном механизме задняя тяга 9 соединена с промежуточным введением двух дополнительных трехсвязных систем 20, 21 с нижней выходной тягой 7. Эти трехсвязные системы 20, 21 состоят из тяг 22, 23, которые шарнирно соединены с задней тягой 9 и соединительными тягами 24, 25, 26, 27, которые в свою очередь, соединены с тягами 22, 23 и которые также шарнирно соединены с нижней выходной тягой 7. Также имеется возможность комбинации отличительных признаков, показанных на этих чертежах систем связи 2, 28, 19. Так, например, имеется возможность сочетания соединительных тяг 10, 11 с пазами 15, 16 и штифтами 17, 18, а также с трехсвязной системой 20, 21. Примером другого сочетания может служить система связи 2, 28, 19 с пазами 15, 16 и штифтами 17, 18 в комбинации с трехсвязной системой 20, 21.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУСТАВ В ОРТОПЕДИЧЕСКИХ ПРОТЕЗАХ И ОРТЕЗАХ | 1993 |
|
RU2103952C1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕННЫМ СОЧЛЕНЕНИЕМ ПРОТЕЗА НОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2089138C1 |
| ОРТЕЗ КОЛЕННОГО СУСТАВА | 1995 |
|
RU2107476C1 |
| ПРОТЕЗНЫЙ СУСТАВ | 1994 |
|
RU2112465C1 |
| ОРТЕЗ СТОПЫ | 1995 |
|
RU2142759C1 |
| ПРОТЕЗ ГОЛЕНИ | 1996 |
|
RU2145200C1 |
| ТОРМОЗНОЕ КОЛЕННОЕ СОЧЛЕНЕНИЕ ДЛЯ ПРОТЕЗА НОГИ | 1996 |
|
RU2141290C1 |
| ТРУБНОЕ ПЕРЕХОДНОЕ УСТРОЙСТВО | 1995 |
|
RU2109496C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ С ВОЗМОЖНОСТЬЮ ПОВОРОТА ЧАСТЕЙ ОРТОПЕДИЧЕСКОГО АППАРАТА | 2002 |
|
RU2285507C2 |







Устройство для осуществления взаимно поворотного сочленения частей ортопедического аппарата предназначено для осуществления взаимно поворотного сочленения частей ортопедического аппарата, в особенности такого, как коленный протез для пациентов с ампутацией ноги, и может быть использовано в протезировании при протезировании инвалидов. Устройство содержит не менее четырех тяг, причем смежные тяги имеют общие оси поворота, а оси поворота располагаются главным образом взаимно параллельно. Задняя тяга соединена с промежуточным введением по меньшей мере одной трехсвязной системы к нижней выходной тяге. Указанная трехсвязная система содержит одну тягу, шарнирно соединенную с задней тягой, причем эта тяга шарнирно соединена в двух точках с двумя соединительными тягами, которые обе шарнирно соединены с нижней выходной тягой. Технический результат заключается в обеспечении возможности естественной ходьбы. 9 з.п. ф-лы, 11 ил.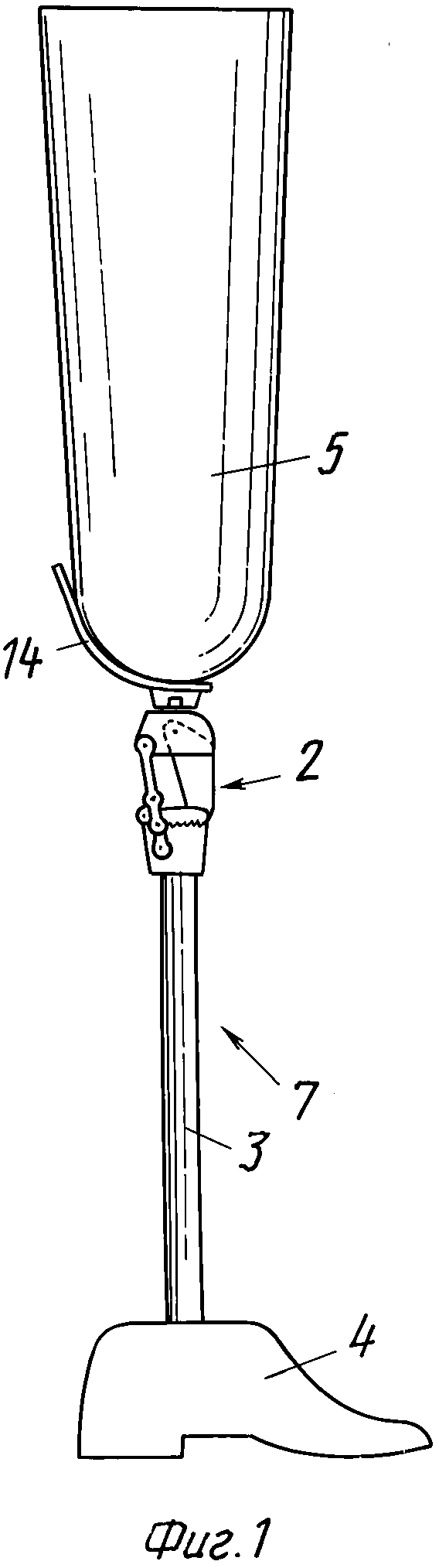
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитный элемент с неразрушающим считыванием информации | 1974 |
|
SU482809A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ | 1999 |
|
RU2151481C1 |

