Изобретение относится к ортопедическому устройству для ортезирования или протезирования пациента коленным суставом, имеющим проксимальную верхнюю часть и расположенную на ней с возможностью поворота вокруг оси колена дистальную нижнюю часть, голеностопным суставом с осью и расположенной дистально на нем с возможностью поворота вокруг этой оси стопной частью и расположенной между голеностопным и коленным суставами голенной частью. Устройство может фиксироваться на теле пациента посредством расположенного проксимально на коленном суставе бедренного компонента.
Задача ортезов заключается в том, чтобы направлять или поддерживать движение имеющейся конечности или поддерживать ее, а протезы заменяют имеющиеся конечности. Протезы ног существуют в разных вариантах, так называемые KAFO (knee angle foot orthosis) поддерживают как стопу, так и голеностопный и коленный суставы. Стопа, как правило, надевается на стопную пластину, одна или несколько шин голени проходят параллельно голени, коленный сустав предусмотрен приблизительно в зоне оси колена, а на одной или нескольких шинах бедра размещены крепежные устройства для фиксации протеза на бедре. Точно так же крепежные устройства могут быть предусмотрены на шинах голени и стопной пластине, чтобы ортез можно было фиксировать на соответствующей ноге.
Протезные устройства с протезом коленного сустава содержат протез стопы, который закреплен посредством трубы голени на протезе коленного сустава. Проксимально протезу коленного сустава предусмотрено крепежное устройство для протеза, которое обычно выполнено в виде бедренной гильзы, в которую может вводиться культя бедра. В качестве протеза коленного сустава могут использоваться различные конструктивные формы, которые простираются от моноаксиального протеза коленного сустава через полицентрический коленный сустав с демпфирующими устройствами до компьютерно-управляемых или приводимых активных протезов коленного сустава. Протезы стопы могут быть закреплены на трубе голени либо жестко, либо шарнирно, также возможны протезы стопы с электроприводом.
В FR 2549719 А1 описан протез с протезом коленного сустава и шарнирно закрепленным на трубе голени протезом стопы. Постериорно оси голеностопного сустава расположена соединительная штанга, связанная посредством рычажного механизма с протезом коленного сустава. При сгибании протеза коленного сустава протез стопы приподнимается и вызывает дорсальное сгибание.
В US 2008/0269913 А1 описана искусственная нога с протезами коленного сустава и стопы. С протезом коленного сустава фронтально оси коленного сустава сочленена соединительная штанга, так что при сгибании колена она перемещается в направляющей в трубе голени. Посредством тяги движение передается к протезу стопы, в результате чего при сгибании колена носок стопы приподнимается.
В US 2009/0265018 А1 описаны приводимый протез ноги и способ управления им для достижения почти естественной походки. Как протез коленного сустава, так и голеностопный сустав снабжены отдельными электроприводами. С помощью датчиков в режиме реального времени управление осуществляется на основе различных интрамодальных программ.
В ЕР 0041052 В1 раскрыт протез нижней конечности, у которого бедренная гильза и голень связаны между собой посредством зубчатого шарнира. Подпружиненный поршневой шток при сгибании колена приподнимает пальцы стопы.
В DE 475303 В1 раскрыта искусственная нога, голенная часть которой соединена с бедренной частью посредством двух шарнирных стержней, вызывая при сгибании протеза коленного сустава дорсальное сгибание.
У протезных устройств с функциональным разделением коленного и голеностопного суставов во время движения предусматривается демпфирование, так что кинетическая энергия преобразуется в тепловую энергию. Если существует функциональная связь между коленным и голеностопным суставами, то энергия движения передается от коленного сустава к голеностопному суставу.
Задача изобретения заключается в том, чтобы при минимальных конструктивных затратах осуществить связь между коленным и голеностопным суставами, с помощью которой можно было бы использовать энергию движения колена для движения голеностопа, которое вызывает приближение к естественной походке и в конце фазы стояния минимизирует вертикальное движение центра тяжести тела.
Согласно изобретению, эта задача решается посредством ортопедического устройства с признаками основного пункта формулы. Предпочтительные варианты осуществления и модификации изобретения раскрыты в зависимых пунктах формулы, в описании и на чертежах.
В предложенном ортопедическом устройстве для ортезирования или протезирования пациента коленным суставом, имеющем проксимальную верхнюю часть и расположенную на ней с возможностью поворота вокруг неподвижной или мгновенной оси колена дистальную нижнюю часть, голеностопным суставом, в частности с неподвижной или мгновенной осью, расположенной дистально на голеностопном суставе, поворотной стопной частью и расположенной между голеностопным и коленным суставами голенной частью предусмотрено, что верхняя часть коленного сустава или закрепленная на ней бедренная часть связана со стопной частью посредством устройства передачи усилий, которое при сгибании колена вызывает подошвенное сгибание стопной части. За счет связи верхней части коленного сустава или расположенного проксимально на нем бедренного компонента, фиксируемого на теле пациента, например бедренной шины или бедренной гильзы, со стопной частью посредством устройства передачи усилий, которое при сгибании колена вызывает подошвенное сгибание стопной части, можно использовать энергию движения колена для движения голеностопа. Аналогично естественной походке, при которой в конце фазы стояния происходит подошвенное сгибание для увеличения длины ноги при сгибании колена, благодаря устройству передачи усилий происходит подошвенное сгибание стопной части. В результате этого возрастает продолжительность контакта стопной части с опорой, что минимизирует вертикальное движение центра тяжести тела. За счет энергетической связи сгибания колена с подошвенным сгибанием стопной части достигается высокая энергетическая эффективность при небольших аппаратных затратах. Когда на фазе маха коленный сустав разгибается, может происходить реверсирование движения, что вызывает дорсальное сгибание стопной части. Точно так же после достижения заданного угла сгиба может произойти переключение активирования протеза ступни, так что после достижения угла сгиба происходит дорсальное сгибание, чтобы уменьшить эффективную длину ноги и чтобы на фазе маха, в частности при выдвигании стопы, не споткнуться или не зацепиться за препятствие. Под подошвенным сгибанием следует понимать движение, при котором происходит поворот стопной части в направлении опоры, в результате чего увеличивается угол между голенной и стопной частями. Дорсальное сгибание является противоположным движением, при котором тыл ступни или подъем движется в направлении большеберцовой кости или голенной части, а угол между тылом ступни или подъемом и голенной частью уменьшается. Поворотное соединение между отдельными компонентами может быть реализовано за счет единственной неподвижной оси, т.е. оси, которая обеспечивает только вращательное движение и которая закреплена в стабильном положении, по меньшей мере, на одном из компонентов. В качестве альтернативы в случае полицентрических суставов может быть реализована смещаемая мгновенная ось вращения, которая за счет полицентрической установки в случае многорычажных суставов не неподвижна относительно, по меньшей мере, одного компонента, а смещается в процессе движения поворота. Таким образом, возникает виртуальная ось вращения, вокруг которой верхняя часть поворачивается относительно нижней части или голенная часть относительно стопной части. Возможно также, чтобы поворотное соединение двух компонентов между собой осуществлялось за счет эластомерного сустава, так что отсутствует какая-либо строго определенная ось вращения, а внутри эластомерного сустава при различных нагрузках образуются различные оси вращения, например при различных поперечных или скручивающих усилиях вокруг оси, проходящей в проксимально-дистальном направлении.
Устройство передачи усилий может быть выполнено в виде гидросистемы, так что за счет поршневых штоков, гидропроводов и клапанов может происходить очень компактная легкая передача усилий от коленного сустава на стопную часть. Точно так же переключение с подошвенного сгибания на дорсальное сгибание может осуществляться очень легко за счет переключающего клапана, которым можно управлять механически или же электрически. В качестве альтернативы или дополнительно может быть предусмотрено механическое соединительное устройство, которое может быть выполнено с возможностью передачи растягивающего и/или сжимающего усилия. Механические соединительные устройства обладают преимуществом прочной конструкции с высокой готовностью к работе и возможностью простого ремонта. Из-за подвижных частей при механическом соединении предметы одежды или облицовки протезов могут тереться или зажиматься.
Механическое соединительное устройство может быть установлено в выступающем дорсально или вентрально к оси колена первом месте установки и в выступающем дорсально или вентрально к оси голеностопного сустава втором месте установки, причем места установки лежат по разные стороны линии соединения осей колена и голеностопного сустава. В случае дорсально выступающего первого места установки соединительное устройство при сгибании колена нагружается на сжатие и передает усилия в конце фазы стояния на лежащее вентрально к оси голеностопного сустава второе место установки, так что вокруг оси голеностопного сустава возникает момент. При обратном расположении первого места установки, т.е. вентрально к оси колена, момент возникает за счет передающего растягивающее усилие соединительного устройства.
Механическое соединительное устройство может быть выполнено в виде шарнирного стержня или тяги в зависимости от того, каково расположение соединительного устройства на верхней и стопной частях. При выполнении в виде шарнирного стержня возможно, чтобы вплоть до определенного угла колена он допускал передачу сжимающего или же растягивающего усилия, а, начиная с заданного угла колена, шарнирный стержень сгибается в шарнире, в результате чего больше не может происходить никакой существенной передачи усилия или происходит реверсирование направления усилия. Угол коленного сустава, при котором шарнирный стержень сгибается, определяется геометрическими отношениями между верхней и нижней точками сочленения соединительного устройства, а также, при необходимости, натяжением шарнира. Шарнирный стержень сгибается только в одном направлении, исходя из исходного положения, так что перед достижением заданного угла коленного сустава всегда возможна надежная передача усилия, и всегда может происходить возврат в исходное положение. Голеностопный сустав может находиться под натяжением в направлении дорсального сгибания, чтобы в случае отсутствия ввода усилия через соединительное устройство или гидросистему без реверсирования направления усилия можно было вызвать дорсальное сгибание.
Чтобы можно было приспособить устройство к пожеланиям пациента и его физическим данным, по меньшей мере, первое место установки выполнено с возможностью регулирования, так что расстояние первого места установки от оси коленного сустава или от оси голеностопного сустава регулируется. Помимо расстояния можно также регулировать положение относительно соответствующей оси, чтобы можно было регулировать степень смещения или подошвенного сгибания стопной части в зависимости от сгибания колена. В зависимости от отношения плеч рычага можно настроить большее или меньшее подошвенное сгибание.
В случае гидравлического устройства передачи усилий могут быть предусмотрены устройство управления и, при необходимости, по меньшей мере, один переключающий клапан, чтобы обеспечивать или прерывать передачу усилий. Прерывание или обеспечение передачи усилий может происходить на основе данных датчиков, углового положения и/или особой ситуации нагрузки, например в зависимости от угла колена, угла голеностопного сустава или измеренных усилий или моментов. Устройство управления может быть выполнено либо с механическим, либо с электрическим управлением. В случае механического управления устройство управления может быть подключено, например, к коленному суставу и выполнено, например, в виде управляющего диска, управляющего кулачка и т.п., так что в зависимости от достигнутого угла колена начинается определенная гидравлическая реакция. Соответствующее выполнение может быть предусмотрено для голеностопного сустава. Начиная с определенного угла, передача усилий может быть прервана, или путем переключения может происходить реверсирование движения таким образом, что при достижении заданного угла колена начинается дорсальное сгибание. Также при реверсировании движения голенной части на фазе маха положение клапана за счет переключения может происходить таким образом, что при движении экстензии коленного сустава это вызывает дорсальное сгибание. При использовании датчиков, регистрирующих определенные нагрузки, движения, углы или другие измеряемые параметры, зарегистрированные данные датчиков можно использовать для того, чтобы управлять передачей усилий, т.е. обеспечивать передачу усилий, прерывать ее или передавать только их часть. Датчики связаны с устройством управления, которое принимает их сигналы, обрабатывает и через исполнительный орган перемещает, например, клапан, т.е. открывает или закрывает его, чтобы изменить поток рабочей жидкости.
На верхней или бедренной части, а также на голенной или нижней или стопной части может быть расположено по одному цилиндро-поршневому блоку, которые соединены между собой, по меньшей мере, одним гидропроводом. Движение колена оказывает на верхний гидроблок давление, которое по соответствующей линии и, при необходимости, через клапанный блок направляется к нижнему гидроблоку для активирования стопной части.
Цилиндро-поршневые блоки могут быть соединены между собой клапанами параллельно или крест-накрест, точно так же возможно индивидуальное регулирование посредством устройства управления вплоть до блокирования цилиндро-поршневых блоков, чтобы в зависимости от соответствующего положения колена, направления движения, скорости движения, ускорения движения или характера ходьбы обеспечить освобождение или активирование стопной части.
Может быть предусмотрено сенсорное устройство для регистрации угла колена, угловой скорости или углового ускорения, которое соединено с устройством управления для регулирования одного или нескольких клапанов, так что предусмотрено клапанное переключение с электронным управлением для управления гидравлической или механической передачей нагрузок.
Устройство передачи усилий может блокировать передачу в направлении дорсального сгибания для того, чтобы смещение на фазе стояния не привело к нежелательному сгибанию колена. Может быть предусмотрено, чтобы максимальное положение дорсального сгибания можно было регулировать, т.е. предусмотрен упор дорсального сгибания, который передвигается для приспосабливания к данному пользователю или условиям использования. Упор дорсального сгибания может быть выполнен в виде механического упора или может быть реализован за счет закрывания клапана.
Со стопной частью может взаимодействовать возвратное устройство, вызывающее ее дорсальное сгибание. Возвратное устройство может быть выполнено, например, в виде пружины или эластомерного элемента, противодействующего подошвенному сгибанию. Голеностопный сустав может быть выполнен в виде гибкого шарнира, в котором расположен эластичный элемент, например эластомерное тело, причем гибкий шарнир оказывает на стопную часть возвратное усилие, так что стопная часть возвращается в исходное положение без воздействия внешних усилий.
В одном варианте предусмотрено, что в голеностопном суставе расположен, по меньшей мере, один демпфер, противодействующий дорсальному сгибанию, так что возвратное движение может происходить после подошвенного сгибания без перемаха.
Ниже примеры осуществления изобретения более подробно поясняются со ссылкой на прилагаемые чертежи, на которых:
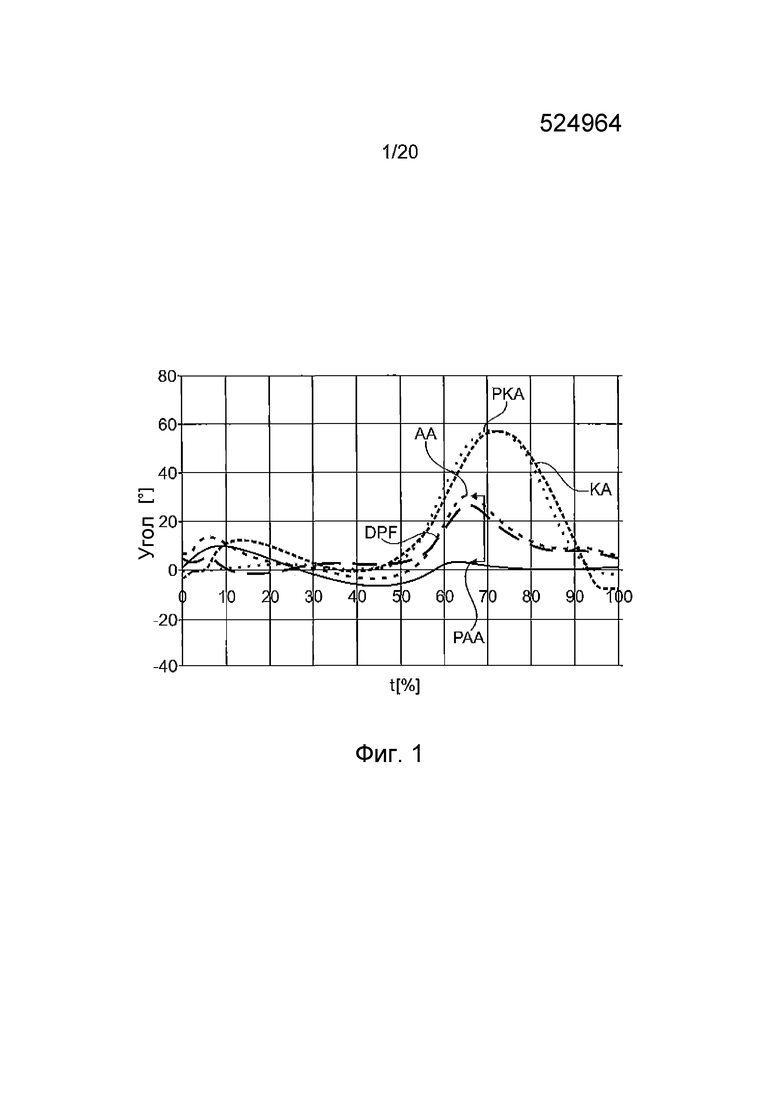
фиг. 1: характеристики углов голеностопа и колена;
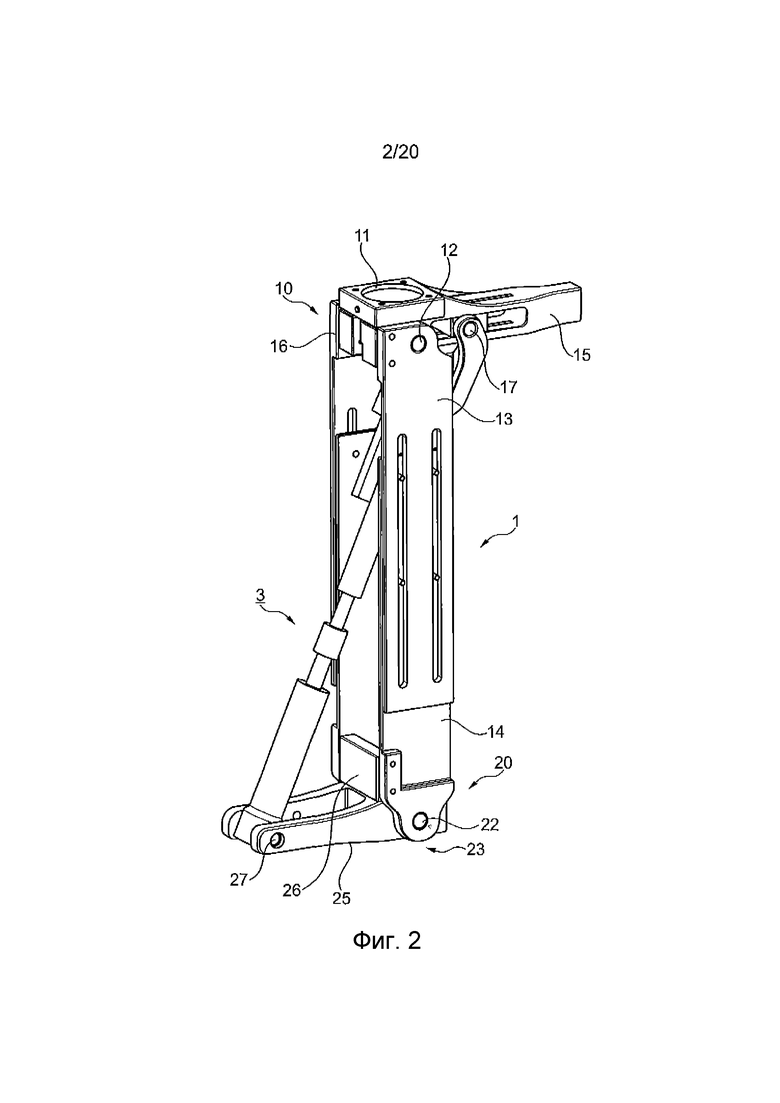
фиг. 2: перспективный вид устройства;
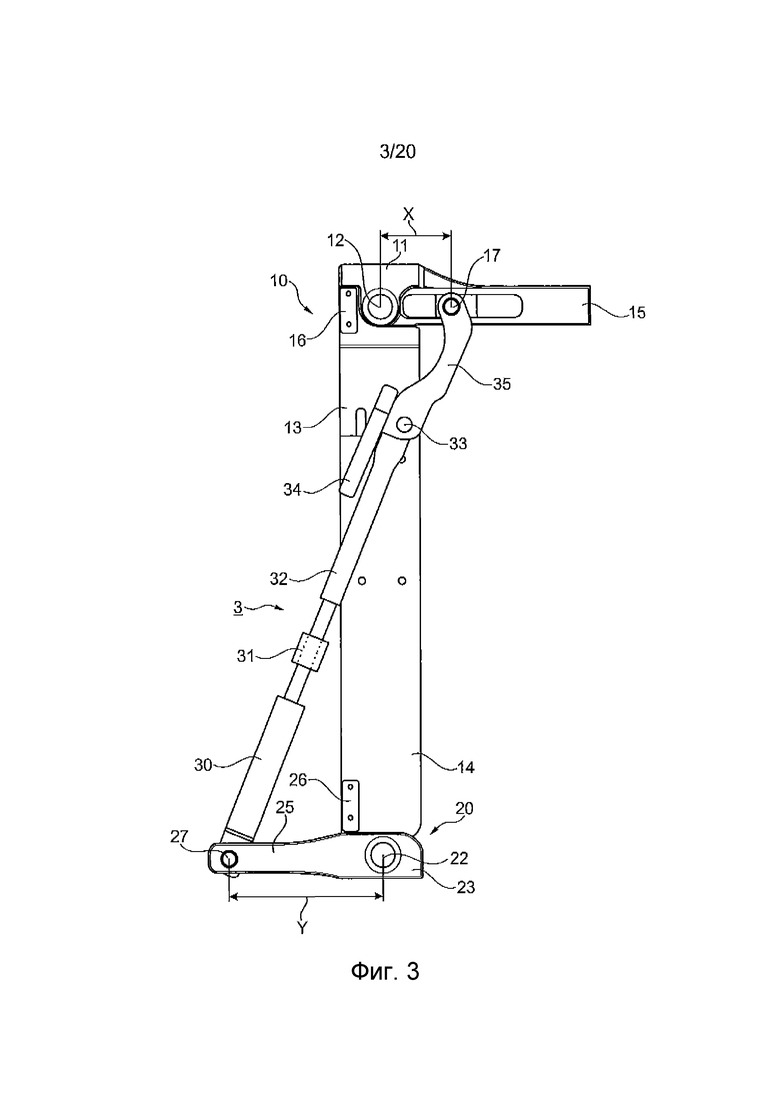
фиг. 3: вид сбоку устройства из фиг. 2 в выпрямленном положении;
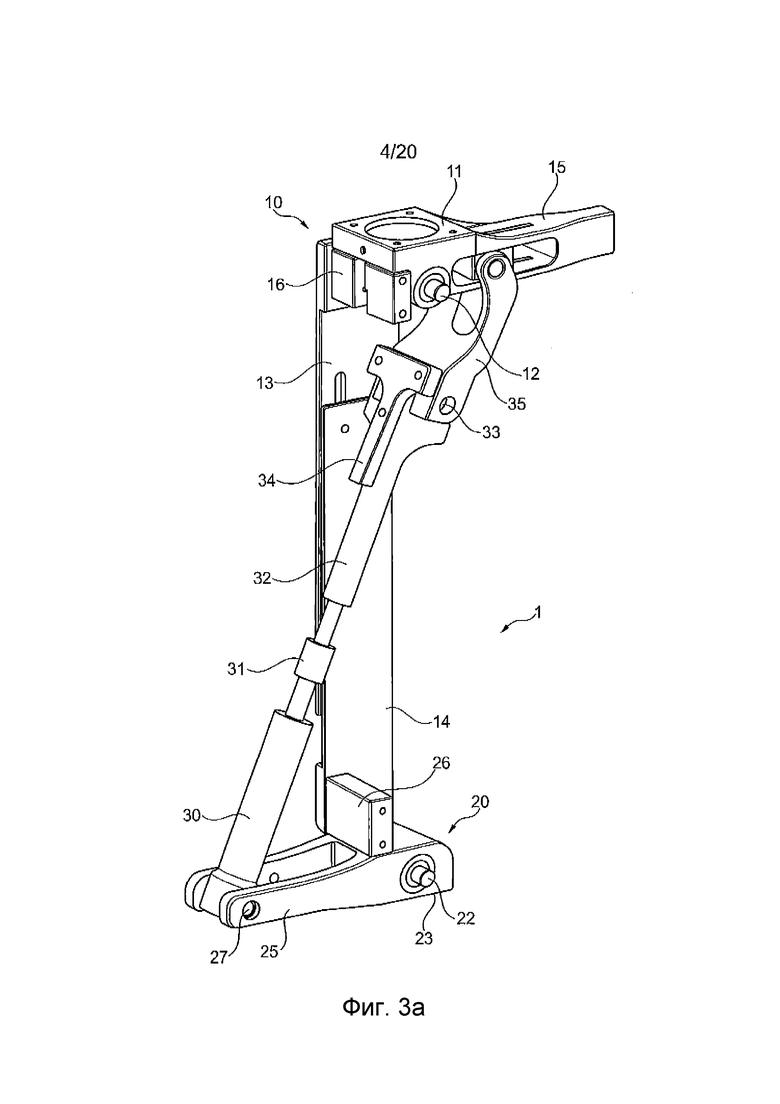
фиг. 3а: перспективный вид из фиг. 3;
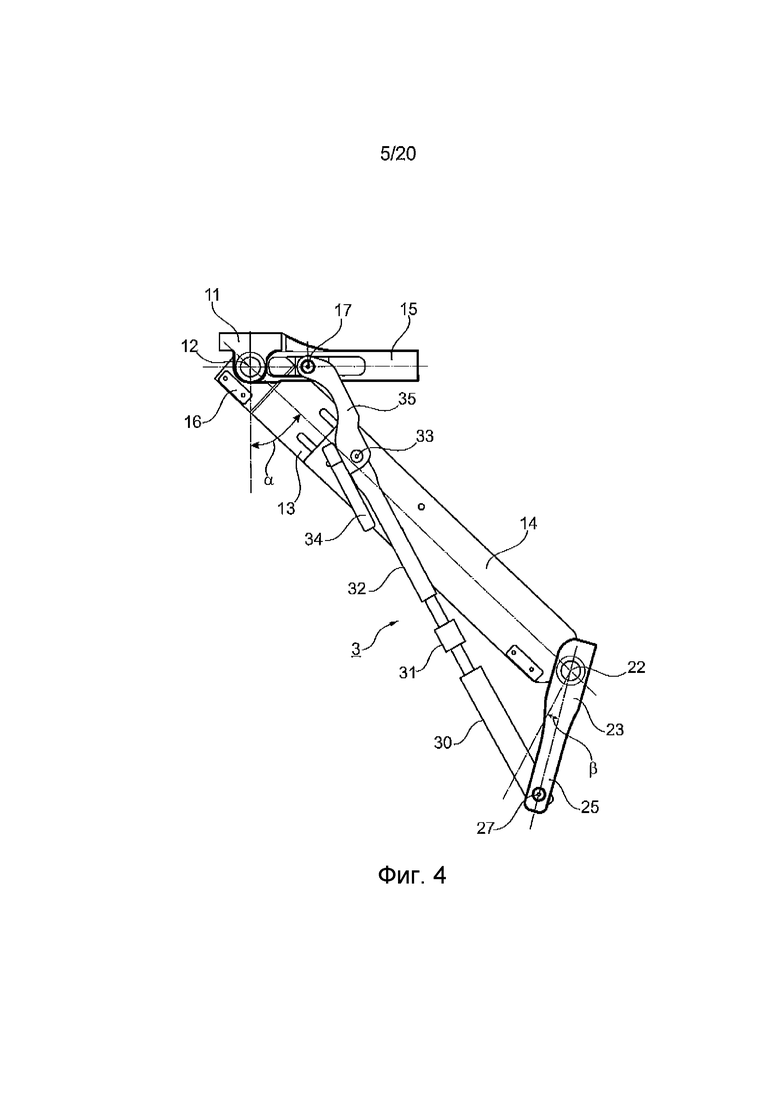
фиг. 4: устройство из фиг. 3 в согнутом положении;
фиг. 5: принцип гидравлической передачи усилий;
фиг. 6: схематично протез с гидроблоком;
фиг. 7: перспективный вид варианта из фиг. 6;
фиг. 8: зеркальный вид варианта из фиг. 6;
фиг. 8а: разрез фиг. 8;
фиг. 9: разрез цилиндро-поршневого блока;
фиг. 10: перспективный общий вид цилиндро-поршневого блока;
фиг. 11: сечение встроенного цилиндро-поршневого блока в выпрямленном состоянии;
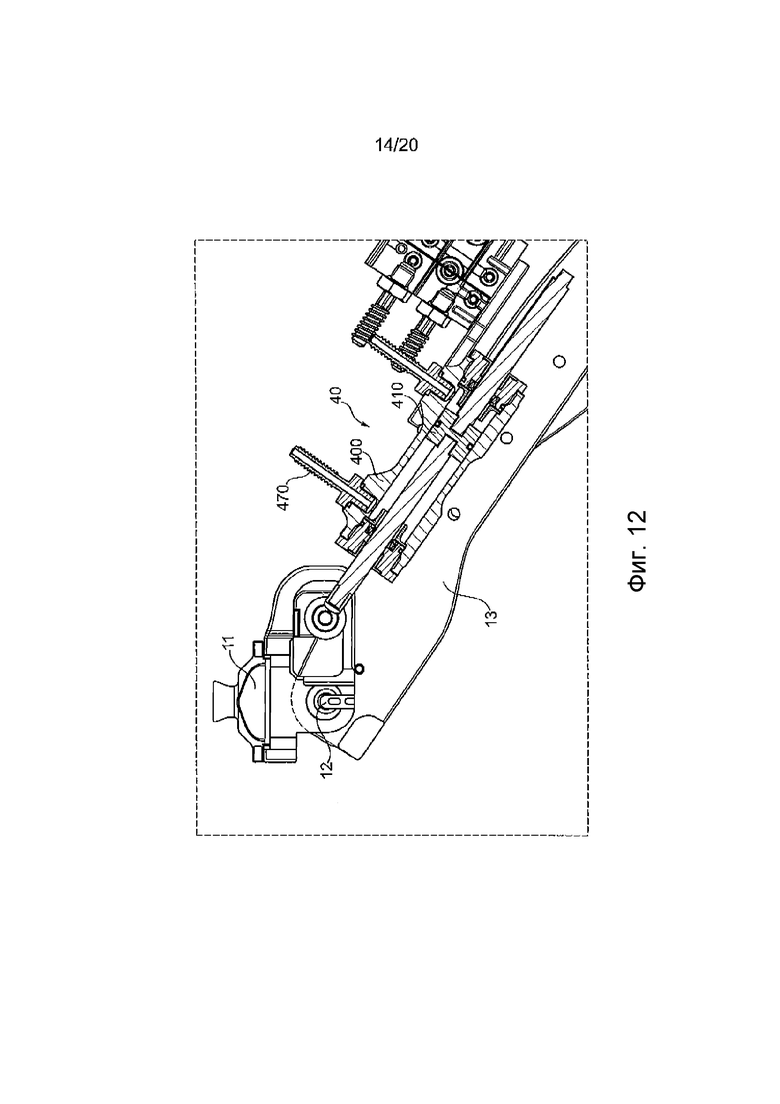
фиг. 12: устройство из фиг. 11 с углом сгиба 60°;
фиг. 13: устройство из фиг. 11 с углом сгиба 120°;
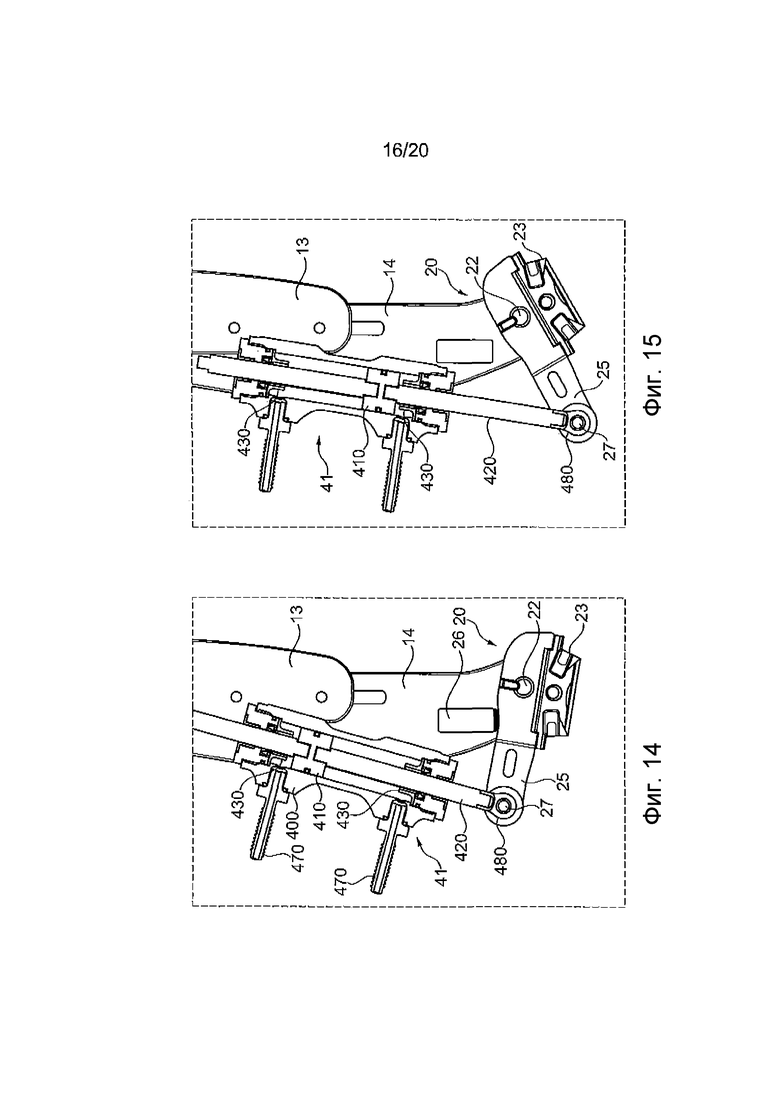
фиг. 14: разрез цилиндро-поршневого блока со стороны поверхности в положении дорсального сгибания;
фиг. 15: вариант из фиг. 14 в положении подошвенного сгибания;
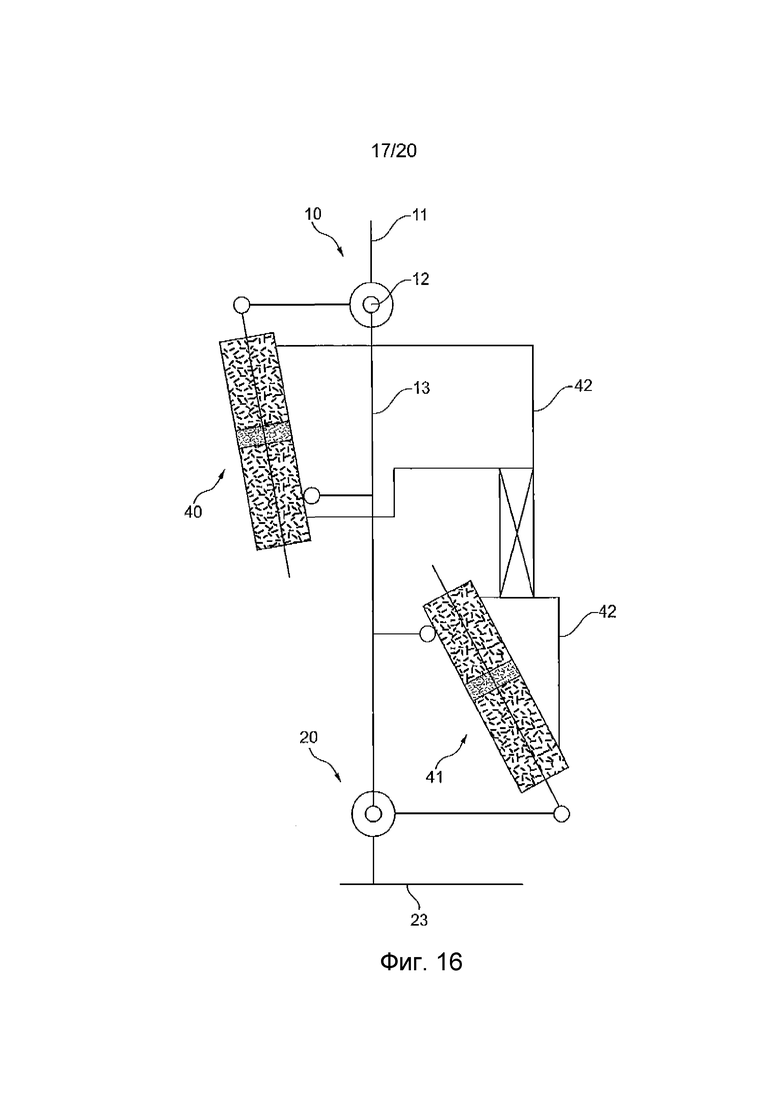
фиг. 16: схематично разные возможности переключения;
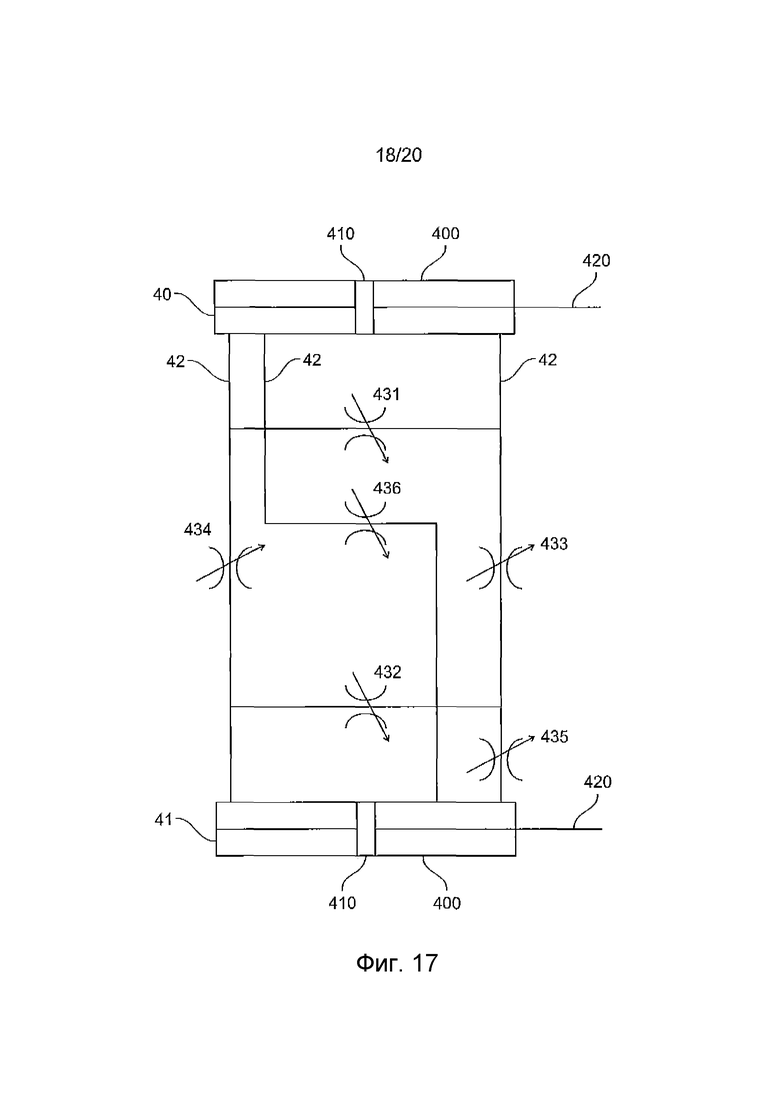
фиг. 17: схематично клапанное устройство;
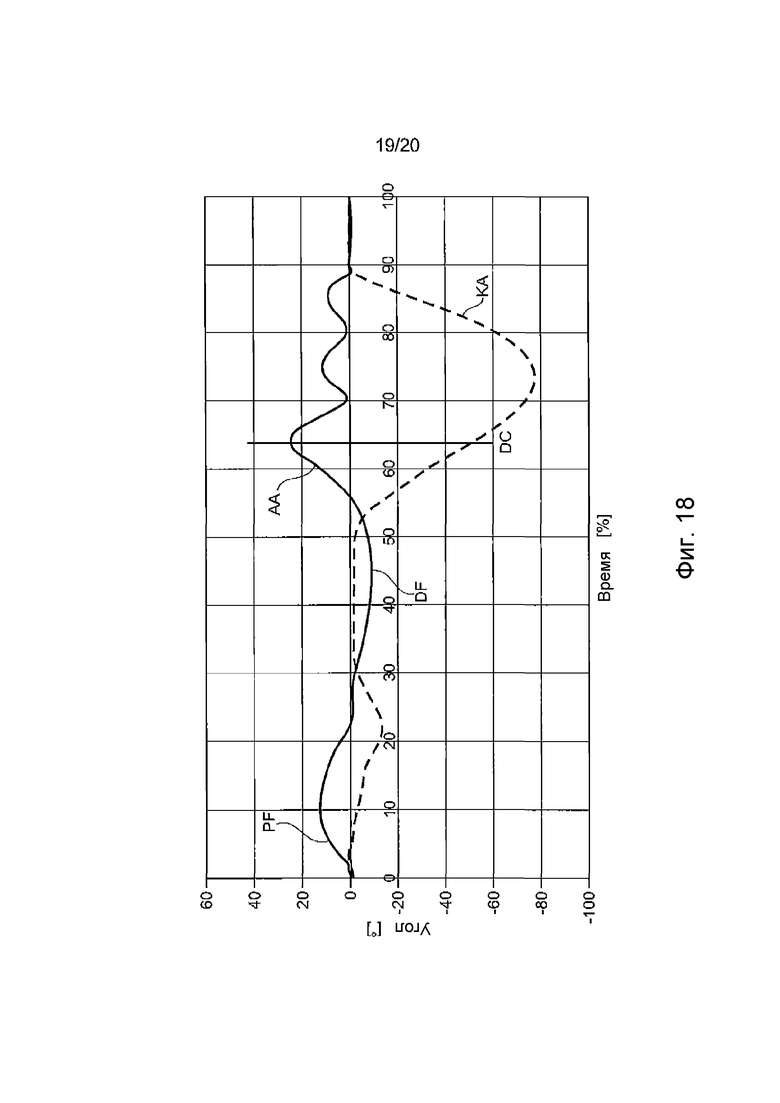
фиг. 18: углы колена и углы голеностопного сустава в зависимости от времени;
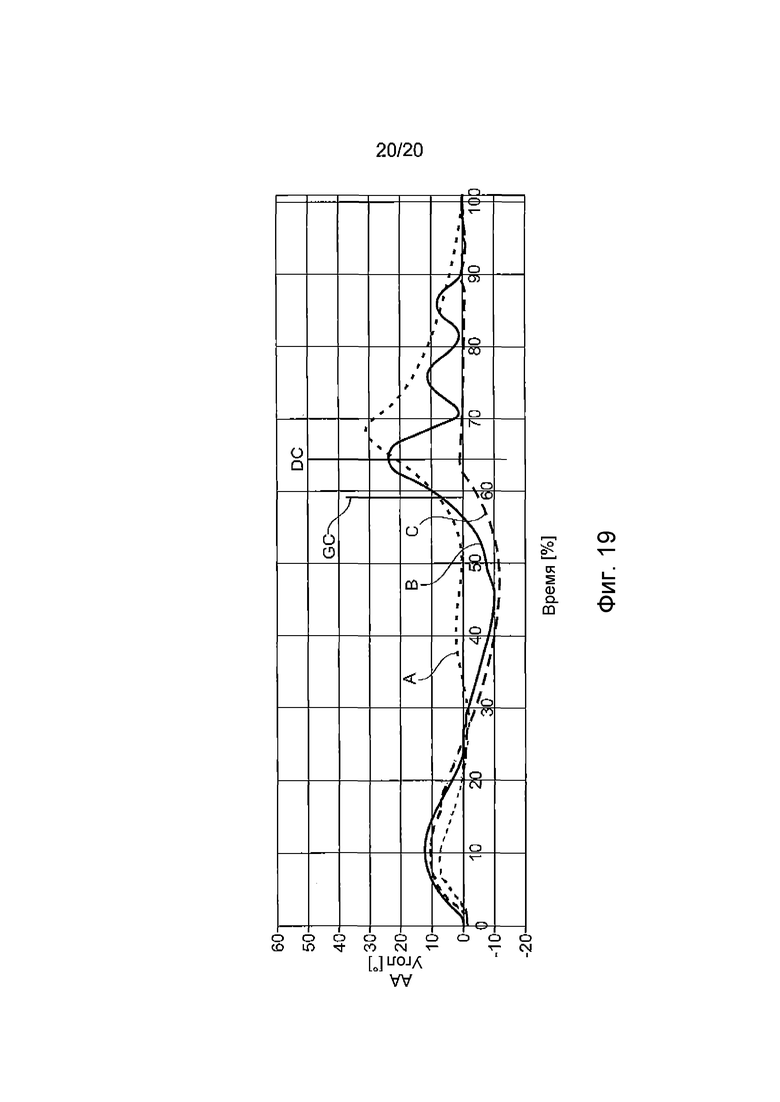
фиг. 19: наложение характеристик углов голеностопного сустава в зависимости от времени.
На фиг. 1 изображены различные углы по времени в течение одного цикла ходьбы. Естественный угол КА колена и естественный угол АА голеностопа обозначены штриховыми линиями, а угол РКА коленного протеза и угол РАА голеностопного протеза - сплошными линиями по времени одного шага от постановки пятки до повторного «приземления» стопы. В то время как естественный угол КА колена можно приблизительно очень хорошо реализовать за счет протеза, что следует из малого дифференциального угла и почти совпадающей характеристики угла КА колена и угла РКА коленного протеза, угол РАА голеностопного протеза сильно отличается от естественного угла АА голеностопа, а степень отклонения обозначена дифференциальным углом ΔPF. Максимальное отклонение составляет приблизительно две трети цикла ходьбы незадолго до отделения пальцев стопы, так называемого «toe off», при котором в случае фазы естественной ходьбы максимальное подошвенное сгибание составляет около 30°, исходя из исходного положения при стоянии, а максимальное подошвенное сгибание в случае протеза - приблизительно 2°, что обусловлено динамикой стопы.
Чтобы обеспечить максимально естественную походку, в одном варианте предложено ортопедическое устройство 1 в виде протеза голени (фиг. 2), содержащего коленный сустав 10 с проксимальной верхней 11 и шарнирно закрепленной на ней вокруг оси 12 колена дистальной нижней 13 частями. На нижней части 13 закреплена голенная часть 14, которая создает соединение с голеностопным суставом 20 и установлена на стопной части 23 с возможностью поворота вокруг его оси 22. Стопная часть 23 выполнена в данном примере в виде посадочного элемента для регулировочного сердечника протеза стопы и содержит консоль 25, которая в данном примере указывает в направлении ходьбы вперед, т.е. ориентирована антериорно. Нижняя 13 и голенная 14 части имеют шлицевые направляющие, так что оба компонента установлены друг на друге с возможностью перемещения для продольной подгонки, если это желательно или необходимо. Нижняя часть 13 состоит из двух боковых пластин, закрепленных на выполненных также в виде боковых пластин голенных частях 14, причем боковые пластины, совпадая, прилегают друг к другу. На нижней части 13 предусмотрен упор 16 для ограничения максимального угла экстензии, а на голенной части 14 - голеностопный упор 26, который ограничивает максимальное дорсальное сгибание стопной части 23.
На верхней части 11, установленной с возможностью поворота вокруг оси 12 колена по часовой стрелке, расположена консоль 15, указывающая в направлении ходьбы назад, т.е. ориентированная постериорно, и снабженная пазовой направляющей, в которой расположена дистальная точка 17 сочленения устройства 3 передачи усилий. Точка 17 сочленения расположена с возможностью перемещения в пазовой направляющей и фиксируется в ней ортопедом в нужном пациенту положении. Конкретная конструкция устройства 3 передачи усилий, которое в данном примере выполнено как механический соединительный элемент в виде шарнирной тяги, ниже поясняется более подробно.
Нижний конец соединительного элемента установлен в дистальной точке 27 сочленения на дистальной консоли 25 шарнирно, однако не перемещаясь. За счет расположения точек 17, 27 сочленения постериорно и антериорно линии соединения оси 12 колена и оси 22 голеностопного сустава сгибание коленного сустава 10 на основе вращения расположенной концентрично оси 12 колена проксимальной точки 17 сочленения по часовой стрелке приводит к перемещению соединительного элемента и вращению дистальной консоли 25 вокруг оси 22 голеностопного сустава против часовой стрелки, в результате чего стопная часть 23 с закрепленным на ней протезом стопы (не показан) при сгибании колена сгибается в подошвенном направлении.
На фиг. 3 при виде сбоку в разрезе протез 1 из фиг. 2 изображен в исходном положении, соответствующем стоянию. Коленный сустав 10 находится в максимальной экстензии, а консоль 25 голеностопного сустава 20 расположена, в основном, под прямым углом к продольной протяженности голенной 14 и нижней 13 частей, а также к линии соединения оси 12 колена и оси 22 голеностопного сустава.
На консоли 15 видны пазовая направляющая для проксимальной точки 17 сочленения, как и проксимальная длина Х рычага, которую можно регулировать. На дистальной консоли 25 обозначена длина Y голеностопного рычага, которая представляет расстояние между дистальной точкой 27 сочленения и осью 22 голеностопного сустава. Хорошо видно также механическое устройство 3 передачи усилий с дистальной гильзой 30, шарнирно установленной на голеностопной консоли 25, двойным винтом 31 со встречными резьбами и проксимальной втулкой 32, установленной на затяжке 35 с возможностью поворота вокруг шарнирной оси 33. На затяжке 35 выполнен упор 34, благодаря которому проксимальная втулка 32, поворачиваясь по часовой стрелке вокруг оси 33, не отклоняется за пределы заданного угла.
На фиг. 3а протез 1 из фиг. 3 изображен в перспективе. Хорошо видно, что голеностопная консоль 25 выполнена в виде открытой с одной стороны вилки с двумя коленами, между которыми в дистальной точке 27 сочленения с возможностью поворота установлена дистальная втулка 30. Дистальная 30 и проксимальная 32 втулки имеют внутреннюю резьбу, в которую ввинчен двойной винт 31. Проксимальная втулка 32 установлена вокруг шарнирной оси 33 на затяжке 35, которая, в свою очередь, закреплена на проксимальной консоли 15. Верхняя часть 10 посредством цапф шарнирно установлена на нижней части 13 вокруг поворотной оси 12, а упор 34 препятствует повороту проксимальной втулки 32 по часовой стрелке вокруг шарнирной оси 33 за пределы установленного значения, определяемого упором 34.
На голенной части 14 закреплен механический упор 26 дорсального сгибания, который устанавливает максимальное дорсальное сгибание стопной части 23. Упор 26 выполнен с возможностью перестановки, так что максимальное дорсальное сгибание можно регулировать.
На фиг. 4 протез 1 изображен в согнутом состоянии. В то время как на фиг. 3 угол α колена составлял 0°, на фиг. 4 предусмотрен угол колена приблизительно 50°. Угол β подошвенного сгибания, который в положении на фиг. 3 составлял 0°, на фиг. 4 составляет около 25°, что можно регулировать посредством различных длин Х, Y рычагов на соответствующих консолях 15, 25. Даже если длина Y рычага на голеностопной консоли 25 регулируется, передаточное отношение во взаимодействии с подгонкой длины можно просто и разнообразно осуществлять двойным винтом 31. Исходное положение, т.е. угол β подошвенного сгибания в зависимости от угла α колена в положении на фиг. 3, можно регулировать за счет двойного винта 31, а также положения проксимальной точки 17 сочленения внутри пазовой направляющей. При вывинчивании двойного винта 31 из резьб втулок 30, 32 устройство 3 передачи усилий удлиняется, так что при неизменном положении точек 17, 27 сочленения стопная часть 23 сгибается в подошвенном направлении, и, наоборот, в противоположном направлении вращения начинается дорсальное сгибание.
На фиг. 4 показан максимальный в данном примере угол α колена, вплоть до которого через устройство передачи усилий из обеих втулок 30, 32, двойного винта 31 и затяжки 35 на дистальную консоль 25 можно передавать сжимающее усилие без поворота дистальной втулки 32 вокруг оси 33. В затяжке 35 может быть выполнен упор, также дальнейшее вращение затяжки 35 относительно консоли 15 можно предотвратить другими устройствами, так что при дальнейшем сгибании коленного сустава 10 дистальный конец затяжки 35 смещается по часовой стрелке, в результате чего происходит складывание устройства 3 передачи усилий, что приводит к уменьшению эффективной длины между обеими точками 17, 27 сочленения. Это приводит к уменьшению угла β подошвенного сгибания, чему может способствовать натяжное устройство, например в виде пружины. За счет уменьшения угла β подошвенного сгибания уменьшается эффективная длина ноги, и носок протеза стопы (не показан) движется в направлении дорсального сгибания и приподнимается, в результате чего может происходить более простой выброс ноги на фазе маха, когда осуществляется движение экстензии коленного сустава 10.
В принципе, можно ориентировать консоли 15, 25 соответственно в обратном направлении, т.е. проксимальную консоль 15 в антериорном направлении, а дистальную консоль 25 в постериорном направлении. При этом устройство 3 передачи усилий работает, в основном, так, что передает растягивающее усилие, когда коленный сустав 10 сгибается.
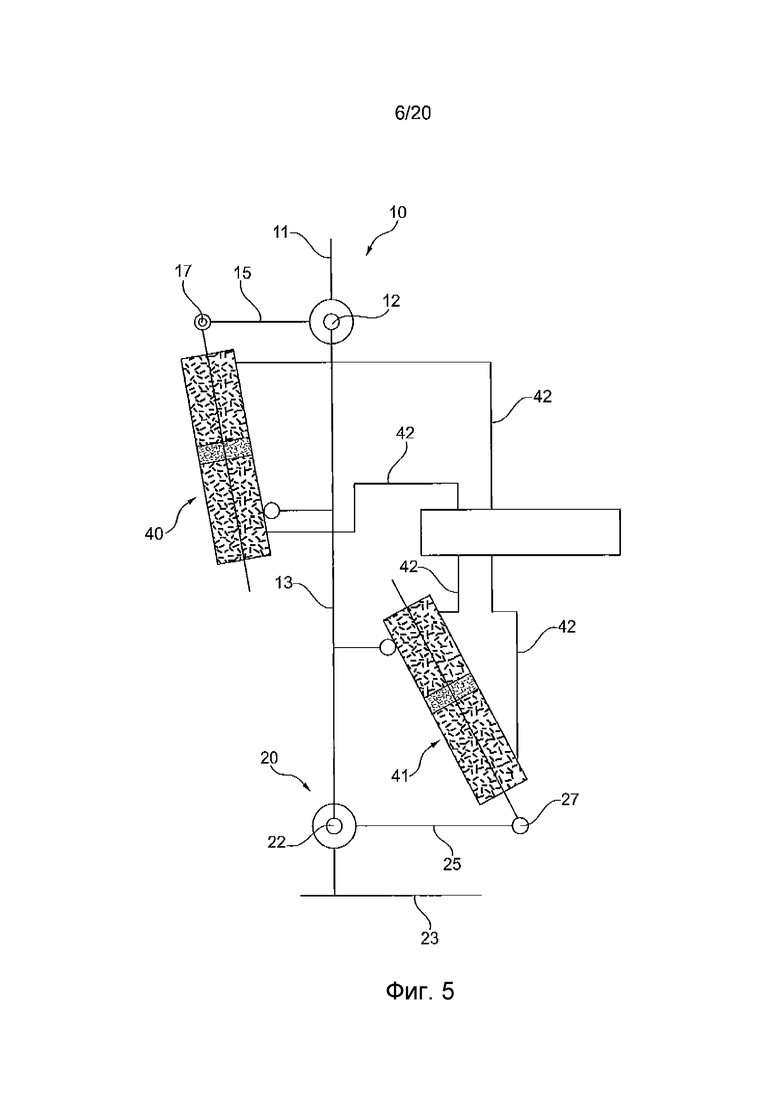
На фиг. 5 изображена принципиальная схема гидравлического устройства 3 передачи усилий. Также здесь на коленном 10 и голеностопном 20 суставах предусмотрены консоли 15, 25, причем при очень простом выполнении коленного сустава 10 нижняя часть 13 может одновременно выполнять соединение между коленным 10 и голеностопным 20 суставами. Как правило, коленный сустав 10 выполнен в виде отдельной детали и содержит верхнюю часть 10 и нижнюю часть 13, на которой с помощью крепежных средств крепится голенная труба или голенная часть 14, которая, в свою очередь, фиксирована на крепежных частях голеностопного сустава 20 протеза ступни. В данном примере в проксимальной точке 17 сочленения и на нижней части 13 установлен первый цилиндро-поршневой блок 41. Посредством гидропроводов 42, впадающих в клапанный блок 43, дистальный цилиндро-поршневой блок 41 находится в проточном соединении с проксимальным цилиндро-поршневым блоком 40. Дистальный цилиндро-поршневой блок 41, при необходимости, установлен на нижней части 13 или на голенной части, а также на консоли 25 в дистальной точке 27 сочленения. При сгибании коленного сустава 10 поршень перемещается внутри проксимального цилиндро-поршневого блока 40 вниз, гидравлическая жидкость течет по гидропроводу 42 в клапанный блок 43, а оттуда - в верхнюю камеру дистального цилиндро-поршневого блока 41, что вызывает подошвенное сгибание стопной части 23 вокруг оси 22 голеностопного сустава.
В данном примере оба гидроблока 40, 41 выполнены в виде цилиндров синхронного хода с одинаковыми объемами и диаметрами. Индивидуальное передаточное отношение может быть реализовано посредством разных рычагов на коленном 10 и голеностопном 20 суставах.
В клапанном блоке 43 могут быть предусмотрены несколько разных клапанов для произвольной связи между собой всех объемов цилиндров и для регулирования различных углов β подошвенного сгибания в нужных угловых положениях колена. Внутри клапанного блока 43 могут быть расположены пропорциональные клапаны, благодаря которым можно осуществлять дросселирование, так что можно создавать разные гидравлические сопротивления. За счет различных подключений отдельных цилиндров можно в зависимости от вида и фазы движения реализовать смещение стопной части 23 в зависимости от угла α колена.
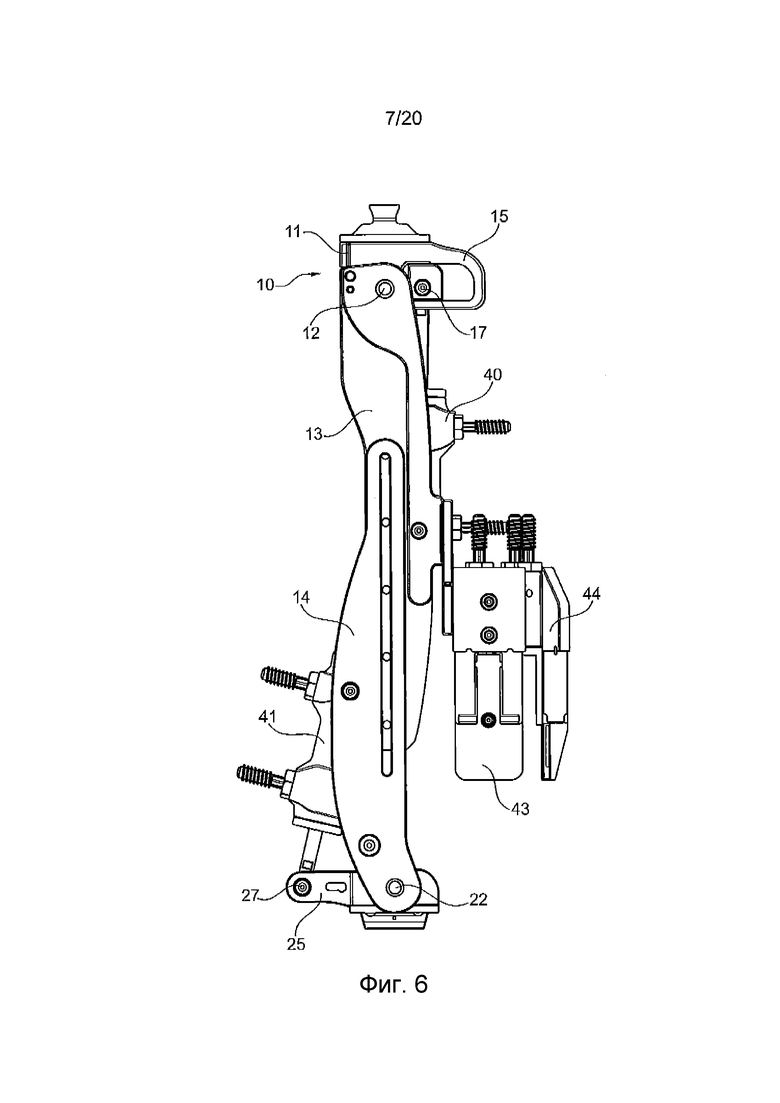
На фиг. 6 изображен схематичный вид сбоку протезного устройства с гидравлической передачей усилий. Аналогично примеру на фиг. 2 в проксимальной консоли 15 выполнена пазовая направляющая, в которой установлена верхняя точка 17 сочленения проксимального цилиндро-поршневого блока 40. С помощью фиксирующего устройства можно регулировать длину Х рычага и, тем самым, механическую передачу. На верхней части 11 коленного сустава 10 закреплен пирамидальный адаптер, а на нижней части 13 коленного сустава 10 с боковыми пластинами установлены регулируемые по высоте голенные части 14, между которыми расположен дистальный цилиндро-поршневой блок 41. Нижняя точка 27 сочленения установлена с возможностью вращения, однако без возможности перемещения на дистальной консоли 25, на которой могут быть расположены датчики для регистрации нагрузки, например в виде тензометров. Клапанный блок 43 снабжен устройством управления 44, в котором размещена коммутирующая электроника, так что расположенными внутри клапанного блока 43 клапанами для различной связи цилиндров в цилиндро-поршневых блоках 40, 41 можно управлять индивидуально и после обработки данных от датчиков.
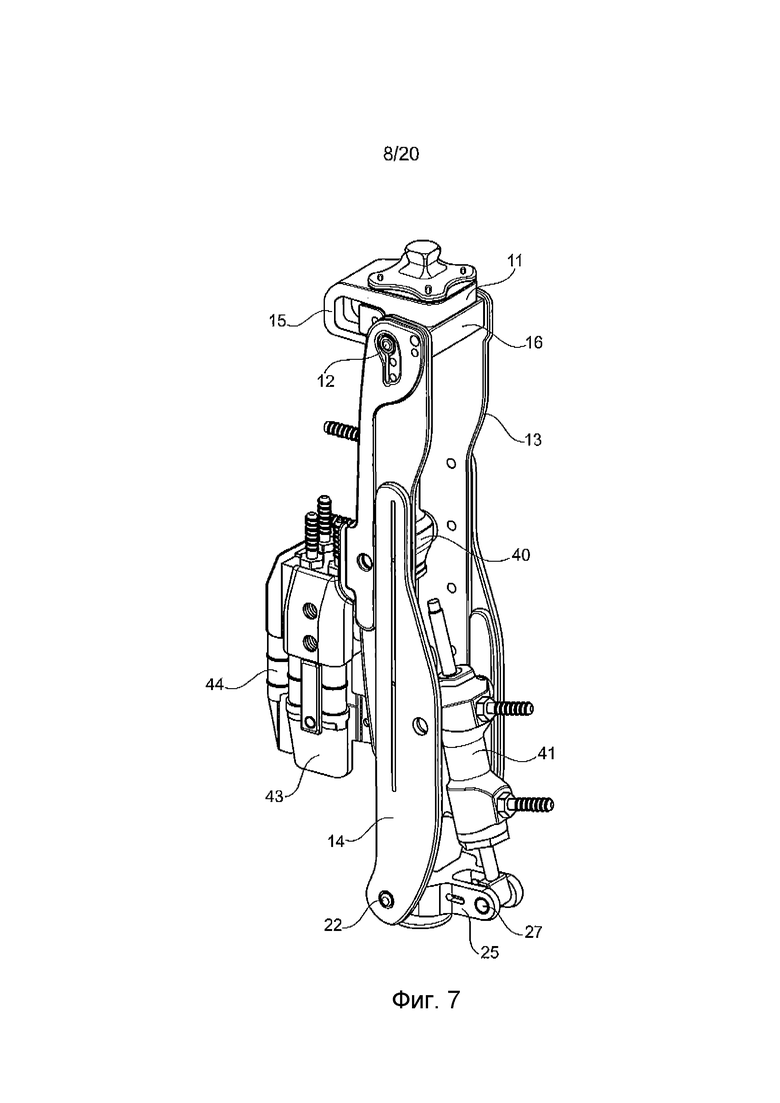
Пример из фиг. 6 изображен в перспективе на фиг. 7, где видно, что цилиндро-поршневые блоки 40, 41 расположены между выполненными в виде боковых пластин голенными частями 14 и нижними частями 13. Точно так же клапанный блок 43 может быть расположен между боковыми пластинами.
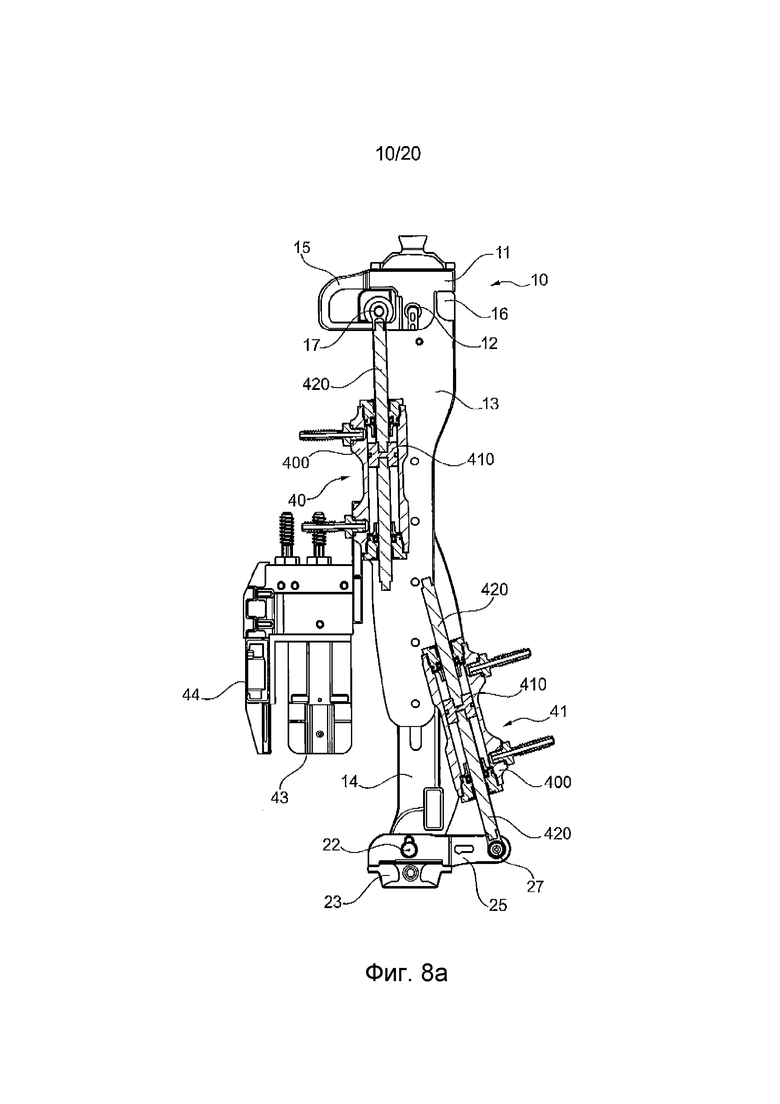
На фиг. 8 изображен вариант осуществления изобретения, в котором в коленном 10 и голеностопном 20 суставах угловые датчики 50 связаны с блоком управления 44, так что в зависимости от угла α колена и угла β подошвенного сгибания подключение клапанов внутри клапанного блока 43 можно осуществлять в зависимости от угла. Точно так же можно предусмотреть другие датчики, например датчики положения или датчики усилий или моментов, чтобы определять положение в пространстве, усилия или моменты и использовать для управления клапанами.
На фиг. 8а изображен разрез фиг. 8. В установленной шарнирно вокруг поворотной оси 12 на нижней части 13 верхней части 11 и в упоре 16 экстензии видна проксимальная консоль 15 с пазовой направляющей для проксимальной точки 17 сочленения. В этой точке закреплен поршневой шток 420 проксимального цилиндро-поршневого блока 40. На поршневом штоке 420 закреплен поршень 410, перемещающийся в корпусе 400 цилиндро-поршневого блока 40. В показанном, полностью выпрямленном положении коленного сустава 10 поршень 410 находится у проксимального упора. По гидропроводам (не показаны), которые впадают в клапанный блок 43, и посредством блока управления 44 с помощью соответствующих клапанов открываются, полностью или частично закрываются, гидравлическая жидкость при движении сгибания подается от дистальной полости цилиндра в дистальный цилиндро-поршневой блок 41. Исходя из показанного нейтрального положения, при сгибании коленного сустава 10 гидравлическая жидкость подается в проксимальную камеру цилиндра дистального цилиндро-поршневого блока 41, так что дистальный поршневой шток 420 перемещается в направлении дистального места 27 сочленения, в результате чего происходит подошвенное сгибание вокруг оси 22 голеностопного сустава.
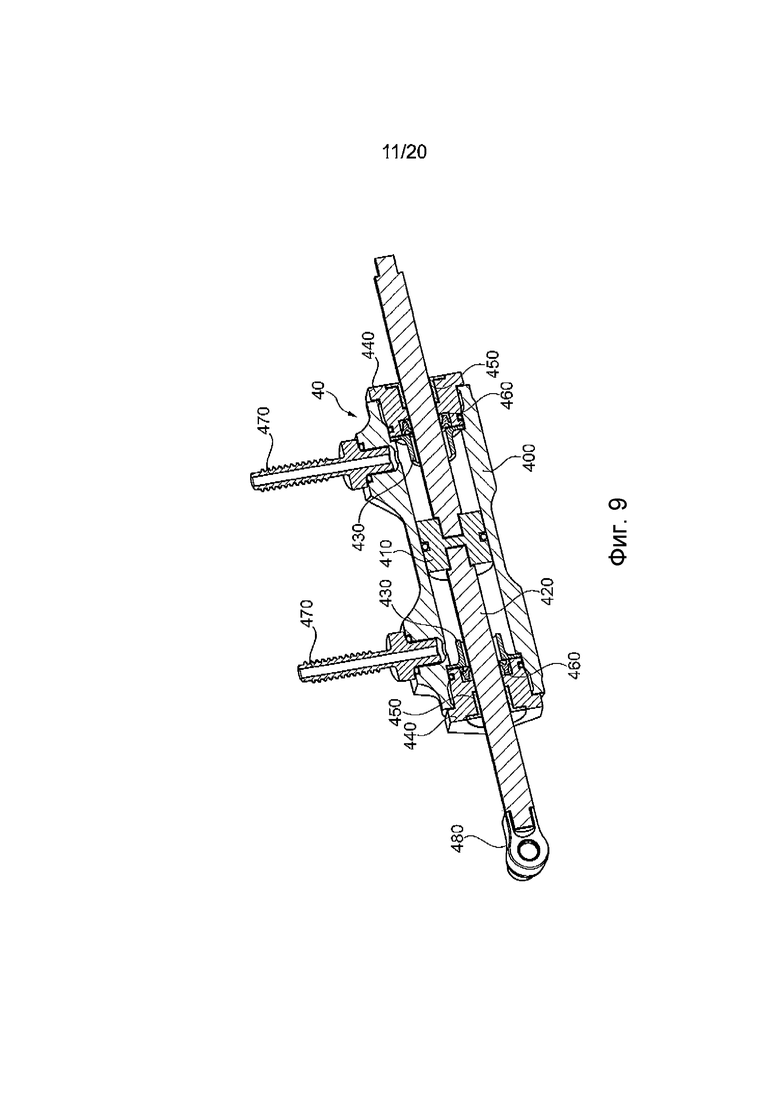
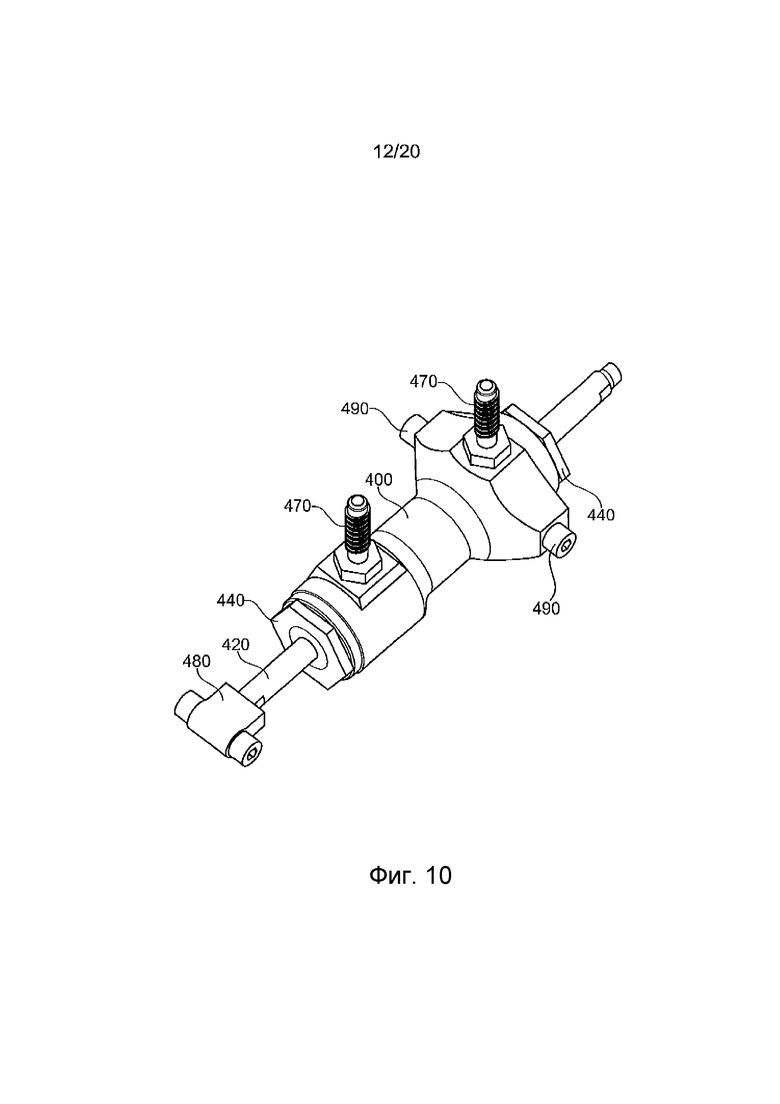
На фиг. 9 изображен подробный вид цилиндро-поршневого блока с корпусом 400, в котором на поршневом штоке 420 закреплен поршень 410. Два концевых упора 430 ограничивают объем корпуса 400. Образованные корпусом 400 цилиндры закрыты крышками 440. В них интегрированы подшипники скольжения 450 и скребки 460. На каждом конце обоих цилиндров, отделенных поршнем 410, предусмотрены шланговые присоединения 470, соединяемые с гидропроводами 42 (не показаны). На поршневом штоке 420 расположен опорный палец 480, который может быть расположен в одной из точек 17, 27 сочленения консолей 15, 25. Опорный палец 480 может быть в качестве головки шарнира снабжен двумя цапфами для установки на консолях 15, 25, а на фиг. 10 в перспективе изображено второе место установки. Цапфы 490 в корпусе 400 служат для установки в боковых пластинах либо нижней части 13, либо голенной части 14.
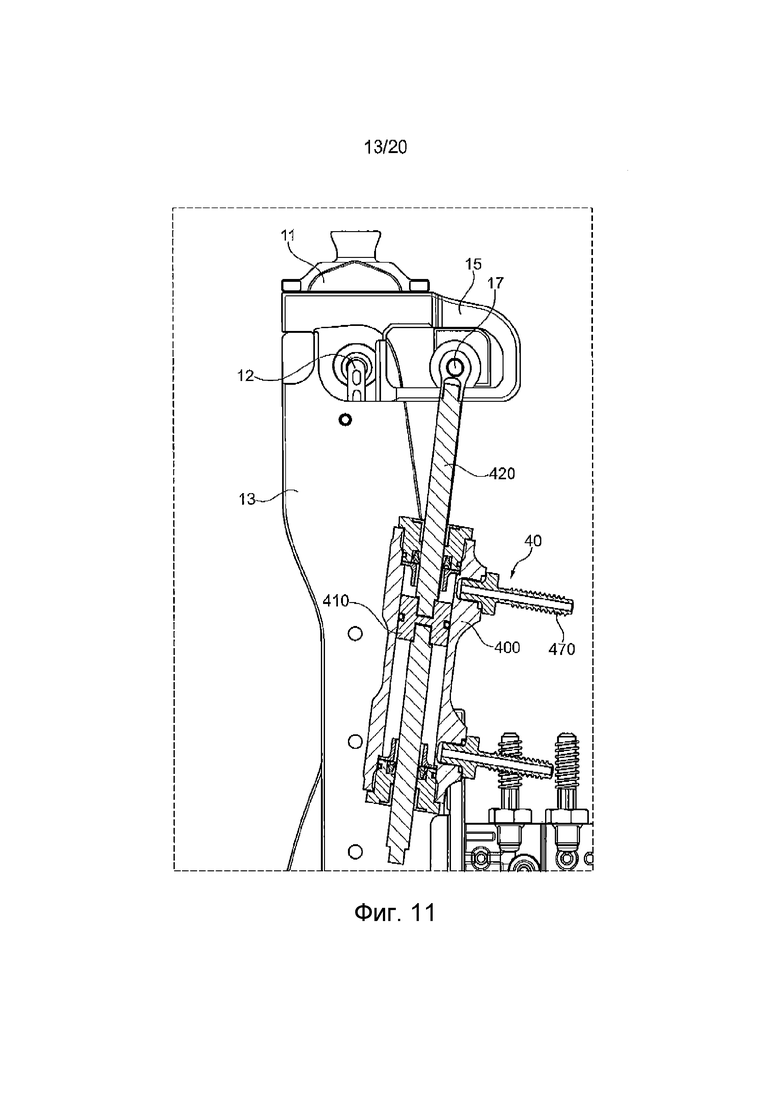
На фиг. 11-13 проксимальный цилиндро-поршневой блок 40 изображен в разрезе в различных угловых положениях колена. В положении на фиг. 11 угол колена составляет 0°, поршень 410 внутри корпуса 400 находится тогда в максимальном положении у проксимального концевого упора. Вся гидравлическая жидкость вытеснена из проксимального цилиндра, а объем дистального цилиндра максимальный.
На фиг. 12 показано угловое положение колена с углом α 60°. Поршень 410 находится по другую сторону середины корпуса 400, так что проксимальный цилиндр имеет больший объем, чем дистальный цилиндр. За счет сгибания коленного сустава поршень 410 переместился внутри цилиндра вниз, а гидравлическая жидкость перетекла из нижнего цилиндра через клапаны к дистальному цилиндро-поршневому блоку 41 (не показан).
На фиг. 13 показано угловое положение колена с углом α 120°. Положение поршня 410 соответствует положению на фиг. 12, однако он уже однажды достиг дистального концевого упора в положении угла α колена 90°. Реверсирование движения поршня 410 при прохождении угла колена 90° может привести либо к реверсированию движения при управлении голеностопным суставом 20, либо может быть компенсировано за счет переключения клапанов.
На фиг. 14 показано расположение цилиндро-поршневого блока 41 на голеностопном суставе 20 с дорсальным сгибанием, при котором поршень 410 находится вблизи проксимального концевого упора 430. На фиг. 15 показан максимально флексированный голеностопный сустав 20, например при угле α колена 90°.
На фиг. 16 схематично показаны разные возможности подключения. Шланговые присоединения 470 могут быть включены параллельно, а также возможно включение шланговых присоединений 470 дистального цилиндро-поршневого блока 41 крест-накрест с шланговыми присоединениями 470 проксимального цилиндро-поршневого блока 40. Точно так же возможно включение цилиндро-поршневых блоков 40, 41 независимо друг от друга, так что между ними отсутствует функциональная связь. Следовательно, коленный 10 и голеностопный 20 суставы свободно подвижны независимо друг от друга, а, при необходимости, с помощью дроссельного клапана можно отрегулировать демпфирование в коленном 10 и/или в голеностопном суставе 20. Если включается проксимальный цилиндро-поршневой блок 40, а дистальный цилиндро-поршневой блок 41 блокируется, то коленный сустав 10 свободно подвижен, а голеностопный сустав 20 неподвижен, причем при блокировании обоих цилиндро-поршневых блоков 40, 41 оба сустава неподвижны.
За счет управляемых сгибания и экстензии в голеностопном суставе 20 в зависимости от угла α колена и от связи подошвенного сгибания в зависимости от сгибания колена можно использовать энергию движения колена для движения голеностопа. Благодаря этому достигается увеличение эффективной длины ноги при сгибании колена в конце фазы стояния, и возрастает продолжительность контакта с опорой, в результате чего минимизируется вертикальное движение точки тяжести тела при ходьбе. Это вызывает приближенность к естественной походке. За счет дорсального сгибания на фазе маха можно снова уменьшить эффективную длину ноги, чтобы минимизировать вероятность спотыкания. На основе непосредственного преобразования механической энергии при минимальной мощности потерь можно достичь высокой энергетической эффективности при относительно небольшой массе по сравнению с известными ортопедическими устройствами, в частности протезами с электроприводами.
На фиг. 17 оба цилиндро-поршневых блока 40, 41, приданных соответственно коленному и голеностопному суставам, изображены схематично в нейтральном положении. Выступающий из корпуса 400 поршневой шток 420 закреплен, например, на консоли 15, 25 для обеспечения передачи усилий, а другой конец цилиндро-поршневого блока установлен на нижней или голенной части.
Гидропроводы 42 соединяют камеры цилиндров между собой в параллельном включении и соединены между собой двумя поперечными линиями, а диагональная линия соединяет обращенную от поршневых штоков 420 камеру цилиндра с обращенной к поршневому штоку 420 камерой цилиндра дистального цилиндро-поршневого блока 41.
В каждом из гидропроводов 42 расположен, по меньшей мере, один клапан 431-436 для реализации различных подключений. Если открываются, например, клапаны 433-435, а клапаны 431, 432, 436 закрываются, то возникает параллельное включение, в результате чего смещение верхнего поршня 410 влево приводит к смещению нижнего поршня 410 вправо. Для создания встречного движения цилиндро-поршневые блоки 40, 41 должны быть включены крест-накрест, для чего клапаны 431, 434, 435 закрываются, а клапаны 432, 433, 436 открываются.
Когда закрываются клапаны 433, 434, 436, это приводит к развязыванию проксимального цилиндро-поршневого блока 40 от дистального цилиндро-поршневого блока 41. За счет частичного закрывания открытых клапанов 431, 432, 435 можно согласовать сопротивление к смещению.
Когда открывается только верхний клапан 431, голеностопный сустав остается неподвижным, а коленный сустав может быть согнут, сопротивление к сгибанию возникает за счет гидравлического сопротивления открытого клапана 431. Неподвижный коленный и подвижный голеностопный суставы возможны, когда клапаны 432, 435 открыты, а остальные клапаны закрыты.
На фиг. 18 изображены характеристики угла КА колена и угла АА голеностопа у протеза коленного сустава с предложенным соединительным устройством в течение одного цикла ходьбы. После постановки пятки, так называемого heel strike, происходит подошвенное сгибание РF голеностопного сустава против, например, усилия пружины, которая удерживает голеностопный сустав в исходном положении. Подошвенное сгибание после heel strike вызвано за счет передачи усилий от сгибания колена устройством передачи усилий и накладывается на действующее в направлении дорсального сгибания усилие возвратной пружины, что в дальнейшем процессе после приблизительно четверти продолжительности шага приводит к устранению действующих в противоположных направлениях усилий. Угол голеностопного сустава тогда снова равен 0°. У коленного сустава возникает начальное сгибание на фазе стояния при одновременном уменьшении угла голеностопного сустава после достижения начального локального максимума примерно при 10% продолжительности шага. После достижения максимальной экстензии коленного сустава приблизительно после трети продолжительности шага точка ввода усилий перемещается перед голеностопным суставом, в результате чего происходит дорсальное сгибание DF. После приблизительно половины продолжительности шага угол КА колена увеличивается, и одновременно начинается подошвенное сгибание, которое направляет дальше возникающие при сгибании колена усилия на голеностопный сустав. После приблизительно двух третей продолжительности шага происходит развязывание DC голеностопного сустава от коленного сустава, так что последний может совершить свободный мах назад, тогда как голеностопный сустав после достижения максимального подошвенного сгибания возвращается в исходное положение. За счет отсутствующего демпфера это возвратное движение происходит в виде затухающего колебания.
На фиг. 19 изображены различные угловые характеристики голеностопного сустава в течение продолжительности шага, причем кривые А, В показывают угловые характеристики, достигаемые предложенным устройством, а кривая С показывает характеристику традиционного голеностопного сустава. В конце контакта GC с опорой, т.е. в конце терминальной фазы стояния, кривые А, В достигают угла подошвенного сгибания 8-10°, тогда как традиционный голеностопный сустав имеет дорсальное сгибание около 8°. После развязывания DC устройства передачи усилий от голеностопного сустава происходит относительно быстрое дорсальное сгибание на кривой В, поскольку там отсутствует демпфирующее устройство, кривая А предусматривает демпфирование, а у кривой С по окончании контакта с опорой снова очень быстро достигается исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ СТОПЫ С НАСТРАИВАЕМЫМИ ФУНКЦИОНАЛЬНЫМИ ХАРАКТЕРИСТИКАМИ | 2005 |
|
RU2348380C2 |
| АДАПТЕР ПРОТЕЗА БЕДРА | 2019 |
|
RU2775127C1 |
| Полицентрический коленный узел для искусственных ног | 2024 |
|
RU2836536C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ СУСТАВОМ | 2008 |
|
RU2484789C2 |
| СУСТАВ В ОРТОПЕДИЧЕСКИХ ПРОТЕЗАХ И ОРТЕЗАХ | 1993 |
|
RU2103952C1 |
| СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ ОРТЕЗНЫМ ИЛИ ПРОТЕЗНЫМ КОЛЕННЫМ СУСТАВОМ | 2014 |
|
RU2661000C2 |
| ПРОТЕЗНАЯ СТОПА | 2005 |
|
RU2359642C2 |
| СПОСОБ ЗАКРЫТОЙ РУЧНОЙ РЕПОЗИЦИИ ПЕРЕЛОМОВ ЛОДЫЖЕК | 2006 |
|
RU2332184C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
| СПОСОБ УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ФАЗЫ ОСТАНОВКИ ИСКУССТВЕННОГО КОЛЕННОГО СУСТАВА | 2016 |
|
RU2715683C2 |


Изобретение относится к медицине. Ортопедическое устройство для ортезирования или протезирования пациента содержит коленный сустав, имеющий проксимальную верхнюю часть и расположенную на ней с возможностью поворота дистальную нижнюю часть, голеностопный сустав, закрепляемую дистально на голеностопном суставе поворотную стопную часть и расположенную между голеностопным суставом и коленным суставом голенную часть. Верхняя часть коленного сустава или закрепленная на ней бедренная часть, фиксируемая на теле пациента, связана со стопной частью посредством устройства передачи усилий, которое при сгибании колена вызывает подошвенное сгибание стопной части. Устройство передачи усилий выполнено в виде гидравлической системы. Изобретение обеспечивает осуществление связи между коленным и голеностопным суставами, с помощью которой возможно использование энергии движения колена для движения голеностопа, которое вызывает приближение к естественной походке и в конце фазы стояния минимизирует вертикальное движение центра тяжести тела. 11 з.п. ф-лы, 21 ил.
1. Ортопедическое устройство для ортезирования или протезирования пациента, содержащее
- коленный сустав (10), имеющий проксимальную верхнюю часть (11) и расположенную на ней с возможностью поворота дистальную нижнюю часть (13),
- голеностопный сустав (20),
- закрепляемую дистально на голеностопном суставе (20) поворотную стопную часть (23) и
- расположенную между голеностопным суставом и коленным суставом (10) голенную часть (14), причем
верхняя часть (11) коленного сустава (10) или закрепленная на ней бедренная часть, фиксируемая на теле пациента, связана со стопной частью (23) посредством устройства (40, 41, 42) передачи усилий, которое при сгибании колена вызывает подошвенное сгибание стопной части (23), отличающееся тем, что устройство (40, 41, 42) передачи усилий выполнено в виде гидравлической системы.
2. Устройство по п. 1, отличающееся тем, что в проксимальной консоли (15) предусмотрена пазовая направляющая, в которой с возможностью регулирования установлена верхняя точка (17) сочленения проксимального цилиндропоршневого блока (40).
3. Устройство по п. 1, отличающееся тем, что гидравлическое устройство (40, 41, 42) передачи усилий содержит устройство управления (44) для обеспечения или прерывания передачи усилий.
4. Устройство по п. 3, отличающееся тем, что устройство управления (44) связано по меньшей мере с одним датчиком (50) для управления передачей усилий в зависимости от показаний датчика.
5. Устройство по п. 3 или 4, отличающееся тем, что на верхней части (11) или на бедренной части и на голенной части (14) или на стопной части (23) расположено по одному цилиндропоршневому блоку (40, 41), которые соединены между собой по меньшей мере одним гидропроводом (42).
6. Устройство по п. 5, отличающееся тем, что цилиндропоршневые блоки (40, 41) выполнены с возможностью соединения между собой параллельно или крест-накрест или с возможностью индивидуального регулирования с помощью клапанов (43).
7. Устройство по одному из пп. 3, 4 или 6, отличающееся тем, что предусмотрено сенсорное устройство (50) для регистрации угла (α) колена и/или угла (β) подошвенного сгибания, которое соединено с устройством управления (44) для перемещения клапана (43) или клапанов (43).
8. Устройство по п. 1 или 2, отличающееся тем, что устройство (40, 41, 42) передачи усилий блокирует передачу усилий в направлении дорсального сгибания.
9. Устройство по п. 1 или 2, отличающееся тем, что максимальное положение дорсального сгибания стопной части (23) выполнено с возможностью изменяемого регулирования.
10. Устройство по п. 1 или 2, отличающееся тем, что стопная часть (23) снабжена возвратным устройством, вызывающим ее дорсальное сгибание.
11. Устройство по п. 1 или 2, отличающееся тем, что голеностопный сустав (20) выполнен в виде гибкого шарнира и возвратное усилие оказывается при отклонении от исходного положения.
12. Устройство по п. 1 или 2, отличающееся тем, что в голеностопном суставе (20) расположен по меньшей мере один демпфер, противодействующий дорсальному сгибанию.
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ | 0 |
|
SU245577A1 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ С РЕГУЛИРОВАНИЕМ СИЛ ПОДТОРМАЖИВАНИЯ РАЗДЕЛЬНО ПРИ СГИБАНИИ И РАЗГИБАНИИ | 2003 |
|
RU2254832C1 |
| CN 102724936 A, 10.10.2012 | |||
| СПОСОБ ПОЛУЧЕНИЯ ОРГАНОМИНЕРАЛЬНОГО УДОБРЕНИЯ ИЗ ОТХОДОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРОИЗВОДСТВА И ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549719C1 |

