Изобретение относится к экспериментальной гидромеханике корабля и касается конструирования динамометров для буксировочных испытаний моделей судов и для самоходных их испытаний в жесткой запряжке.
Известен динамометр буксировочной тележки (Г.Е. Павленко. Сопротивление воды движению судов. - "Морской транспорт", М., 1956, с. 272-275), содержащий установленное на ней устройство с чувствительным элементом, связывающим модель судна с буксировочной тележкой. Однако такой динамометр обладает инерционной погрешностью при измерениях с его применением.
Технический результат от внедрения изобретения состоит в устранении инерционной погрешности измерений с помощью динамометра буксировочной тележки.
Этот результат достигается тем, что динамометр буксировочной тележки содержит установленное на ней устройство с чувствительным элементом, связывающим модель судна с буксировочной тележкой, и выполнен с установленным на буксировочной тележке грузом, связанным с моделью и имеющим возможность перемещения относительно буксировочной тележки в сторону, противоположную возможному перемещению модели относительно этой тележки, причем величина массы груза выбрана из условия:
m = i(M+ΔM-K)
где m - масса груза;
M - масса модели;
ΔM - присоединенная масса воды;
K - постоянная величина, устанавливаемая опытным путем для конкретного динамометра;
i - передаточное отношение связи между моделью и массой.
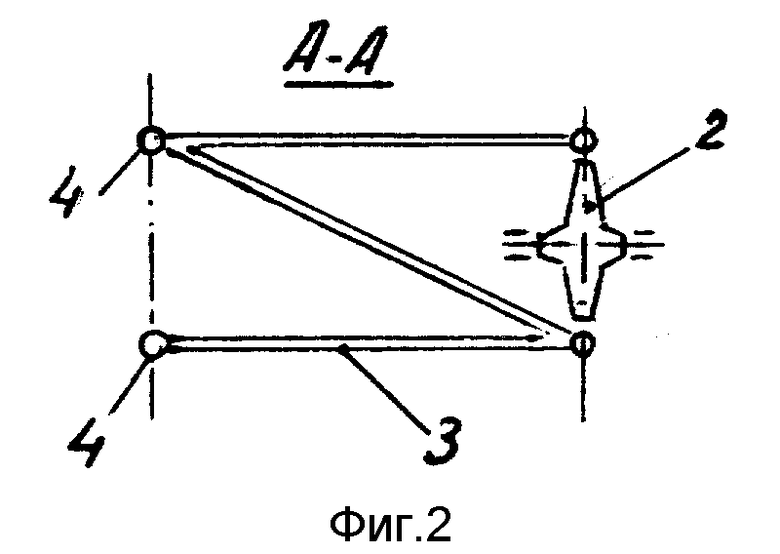
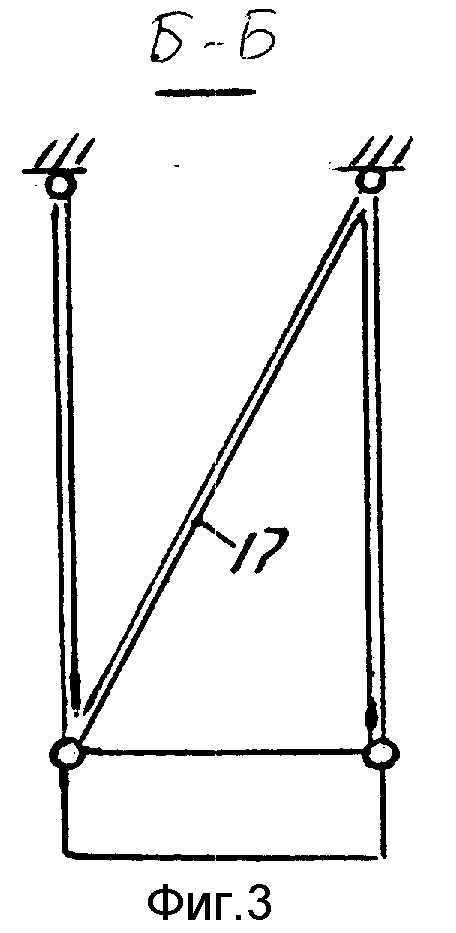
На фиг. 1 показана конструкция динамометра буксировочной тележки; на фиг. 2 - сечение А-А фиг. 1; на фиг. 3 - сечение Б-Б фиг. 1.
Модель судна 1 через шарнир 2 Кардана и N-образную тягу 3 шарнирами 4 соединена с измерительным рычагом 5, имеющим вид пространственной фермы. Рычаг 5 имеет ось вращения 6, расположенную на подвижной раме 7. Чувствительный элемент 8, например, в виде преобразователя линейных перемещений в частоту переменного тока закреплен на подвижной раме 7 и шарнирно связан с рычагом 5 посредством тяги 9. На верхней части рычага 5 закреплена сменная масса 10, а также сменные пружины 11, другим своим концом закрепленные на подвижной раме 7, где также установлены ограничители хода 12 рычага 6 и неподвижные части гидравлических демпферов 13, подвижные части которых закреплены на рычаге 5. Механизм тарировки чувствительного элемента 8 состоит из двух шкивов 14, установленных на подвижной раме 7 и перекинутых через них нитей, одним концом закрепленных на рычаге 5, в то время как другой конец несет подвеску 15, где размещаются тарировочные грузы 16. На одной из этих подвесок размещается такой же груз, служащий для уравновешивания главной части буксировочного сопротивления.
Подвижная рама 7 шарнирно подвешена на двух N-образных тягах 17, верхние шарниры которых закреплены на неподвижной раме (не показана). К этой раме крепится клещевидный электромагнитный тормоз 18, взаимодействующий с тормозной планкой 19, закрепленной на подвижной раме 7. Подвижная и неподвижная рамы также связаны съемными пружинами 20 малой жесткости (например, резиновыми лентами) и съемной пружиной-амортизатором 21 большой жесткости, работающей на растяжение и сжатие и включающей резиновый элемент.
Неподвижная рама закреплена на буксировочной тележке (не показана) быстросъемными узлами с возможностью регулировки по высоте и, кроме того, подвешена на тросе, перекинутом через блоки и имеющем на другом своем конце противовес.
Ограничители хода 12 электрически изолированы от рамы 7 и при соприкосновении с измерительным рычагом 5 предназначены для замыкания электрической цепи соответственно передней или задней лампочки-индикатора. Чувствительный элемент 8 электрически связан с электронным частотомером, который высвечивает на своем табло среднюю частоту тока за время прохода моделью измерительного участка или за заданное время.
Величина массы 10 определяется по формуле:
m = i(M+ΔM-K),
где m - масса груза;
M - масса модели;
ΔM - присоединенная масса воды;
K - постоянная величина, устанавливаемая опытным путем для конкретного динамометра;
i = c/d - передаточное отношение связи между моделью судна 1 и массой 10;
с - длина нижнего плеча рычага 5;
d - расстояние от центра массы 10 до оси 6.
При этом величину К можно определить как величину некоторой точечной массы, закрепленной вместо модели судна, когда при ускорении буксировочной тележки динамометр с удаленной массой 10 находится в равновесии. Величина присоединенной массы ΔM определяется по справочникам.
В опытном экземпляре динамометра ось 6 образована двумя парами крестообразно расположенных плоских пружин, а шарниры 4 и шарнир Кардана выполнены на шарикоподшипниках.
Динамометр эксплуатируется следующим образом.
Перед началом опытов устанавливаются пружины 11 такой жесткости, чтобы период собственных угловых колебаний измерительного рычага 5 вместе с моделью 1 и установленной на нем массой m был равен заданной величине, например 2 с. Затем производится тарировка чувствительного элемента 8. Непосредственно перед рабочим пробегом на левую (заднюю) подвеску кладется груз, равный ожидаемому буксировочному сопротивлению с учетом передаточного отношения. Зажигается левая (задняя) лампочка-индикатор. Производится разгон буксировочной тележки, после чего через некоторое время лампочка гаснет. Буксировочное усилие передается от тележки к подвижной раме 7 через амортизатор 21, который, кроме того, изолирует динамометр от горизонтальной вибрации буксировочной тележки. Шарнир 2 Кардана разгружает динамометр от возможных кренящих моментов, действующих на модель 1. После торможения вновь загорается левая лампочка.
При работе на волнении амортизатор 21 демонтируется. По условиям опыта в зависимости от массы модели 1 подбирается жесткость пружин 20. Перед стартом включается тормоз 18, затем начинает генерироваться волнение в бассейне. После разгона тормоз 18 автоматически выключается, модель судна 1 вместе с подвижной рамой 7 начинает испытывать продольно-горизонтальную качку около некоторого среднего положения. Непосредственно перед торможением буксировочной тележки автоматически включается тормоз 18, что предотвращает, как и при разгоне, возможный жесткий удар подвижной рамы 7 о свои ограничители.
Применение динамометра с механическим компенсатором инерции позволяет практически устранить инерционную погрешность в буксировочных и самоходных испытаниях моделей судов, в том числе и при испытаниях с ускорением и замедлением. Это существенное повышение точности эксперимента открывает возможность постановки качественно новых, ранее недоступных исследований в существующих бассейнах для проведения опытов, например в длинных бассейнах экспериментов, требующих особой точности, ранее невозможных, а в коротких бассейнах - производство стандартных самоходных испытаний моделей крупных транспортных судов. Для них характерно высокое отношение водоизмещения к буксировочному сопротивлению и, следовательно, большое значение инерционной погрешности при использовании имеющихся динамометров, что ранее делало буксировочные и самоходные испытания в коротких бассейнах для опытов ненадежными.
Кроме того, предлагаемый динамометр позволит уменьшить длину и количество пробегов модели, что удешевит исследования. При проектировании новых бассейнов для опытов он позволит сократить их длину, что уменьшит стоимость строительства.
Использование: экспериментальная гидромеханика корабля, касается конструирования динамометров для буксировочных испытаний моделей судов и для самоходных их испытаний в жесткой запряжке. Сущность: динамометр буксировочной тележки содержит установленное на ней устройство с чувствительным элементом, связывающим модель судна с буксировочной тележкой, и выполнен с установленным на буксировочной тележке грузом, связанным с моделью и имеющим возможность перемещения относительно буксировочной тележки в сторону, противоположную возможному перемещению модели относительно этой тележки, причем величина массы груза выбрана из условия: m = i(M+ΔM-K), где m - масса груза, M - масса модели, ΔM - присоединенная масса воды, K - постоянная величина, устанавливаемая опытным путем для конкретного динамометра, i - передаточное отношение связи между моделью и массой. 3 ил.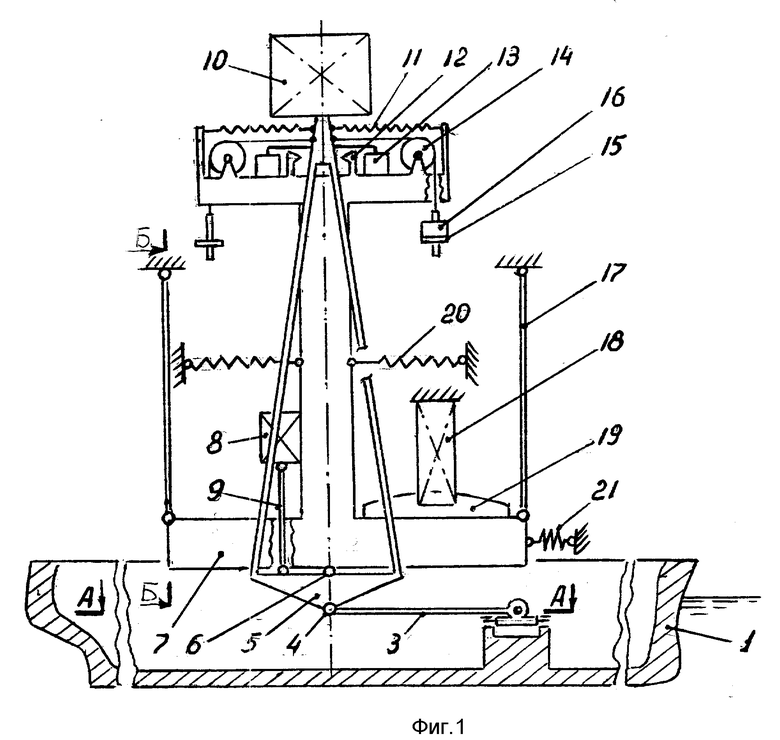
Динамометр буксировочной тележки, содержащий установленное на ней устройство с чувствительным элементом, связывающим модель судна с буксировочной тележкой, отличающийся тем, что он выполнен с установленным на буксировочной тележке грузом, связанным с моделью и имеющим возможность перемещения относительно буксировочной тележки в сторону, противоположную возможному перемещению модели относительно этой тележки, причем величина массы груза выбрана из условия
m = i(M+ΔM-K),
где m масса груза;
M масса модели;
ΔM - присоединенная масса воды;
К постоянная величина, устанавливаемая опытным путем для конкретного динамометра;
i передаточное отношение связи между моделью и массой.
| Павленко Г.Е | |||
| Сопротивление воды движению судов | |||
| - М.: Морской транспорт, 1956, с | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
