Изобретение относится к промышленному рыболовству, а именно к способам концентрации живых организмов перед выловом.
Известны способы управления движением живых организмов: способ механического управления с использованием сети, способы, основанные на свойствах звуковых и ультразвуковых волн.
Все эти способы применимы только в случае предварительного обнаружения рыбы, они не позволяют концентрировать рыбу в районе лова.
За прототип принят способ, в котором также используются свойства лазерного излучения. Способ предусматривает развертывание лазерных лучей по плоскости, которая препятствует прохождению организмов.
Недостатком прототипа является то, что он не дает возможность управлять движением живых организмов, а следовательно, способствовать их концентрации у борта судна.
Цель изобретения - увеличение вылова живых организмов за счет их концентрации у борта судна.
Для достижения поставленной цели предлагается перемещать лазерный луч в сине-зеленой части спектра со скоростью ≅0,1 м/с по направлению к борту судна. Живые организмы двигаются вслед за лазерным лучом. Причем величина скорости определяется в зависимости от объекта лова; так для рыбы эта скорость примерно 0,1 м/с, для кальмаров - 0,05 м/с. Если скорость больше 0,1 м/с, рыба, как правило, не успевает двигаться вслед за лучом.
В отличие от известных аналогов, лазерный луч применяется в предлагаемом техническом решении для управления движением живых организмов, непосредственно направляет их движение, что ранее не применялось совсем. В патентной и научно-технической литературе не описаны случаи применения лазерного луча для управления движением живых организмов. Экспериментально установлено, что скорость перемещения луча по водной поверхности не должна превышать 0,1 м/с, именно движение луча с такой скоростью позволяет получить эффект управления движением живых организмов, т.е. у предлагаемого способа появляются отличительные признаки, позволяющие достичь поставленной цели - концентрации живых организмов для увеличения их вылова. Следовательно, предлагаемое техническое решение соответствует критерию "существенные отличия".
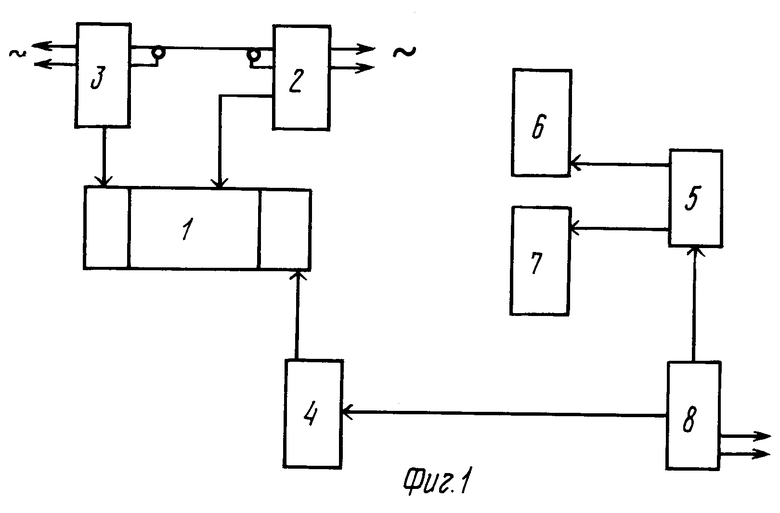
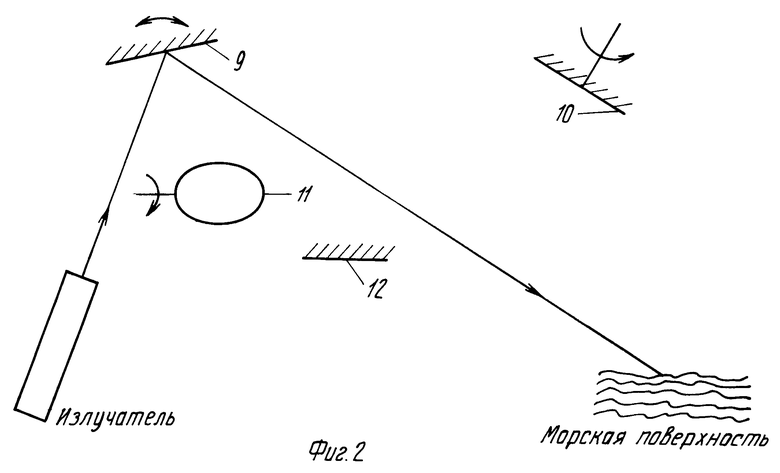
На фиг.1 изображена схема установки для осуществления способа; на фиг.2 - оптическая схема блока развертки лазерного луча.
В качестве источника света 1 (фиг.1) использовался твердотельный на неодимовом стекле с водяным охлаждением типа ИХ-25 со средней мощностью при частоте 50 Гц - 0,4 Вт, частота следования импульсов изменялась от 1 до 20 Гц, длительность одного импульса 20 мс, пиковая мощность в импульсе 0,3 мВт.
Блок питания 2 импульсного твердотельного лазера типа БПИТЛ-3, блок управления затвором 3 (БУЗ), блок нагрева кристалла 4 (БН) имеют заводское изготовление. Блок регулировки скорости поворота зеркал 5 (БРС) управляет тихоходными двигателями постоянного тока 6 и 7 типа ДПМ-30-Н путем регулировки скважности генератора, схема подключена к блоку питания 8.
На оптической схеме блока развертки лазерного луча показаны зеркала 9-11, закрепленные на оси двигателей. Зеркало 12 закреплено на основании неподвижно. В зависимости от соотношения скорости вращения зеркал обеспечивается необходимый режим работы установки.
На блоке питания лазерной установки 2 расположены все основные ручки управления работой излучателя и индикаторы контроля для получения нужного излучения. Блок нагрева 4 служит для поддержания постоянной температуры лазера. Для управления движением луча используются зеркала 9-12 (фиг.2), которые приводятся в движение с помощью тихоходных двигателей 6 и 7 (фиг. 1). Скорость двигателей регулируется на блоке управления двигателями.
Режим сканирования обеспечивает перемещение луча по морской поверхности с заданной скоростью. Для этого на блоке управления двигателем, вращающем зеркало 9, имеются кнопки для быстрого и медленного вращения.
Режим светового конуса обеспечивает при использовании неподвижных зеркал 9 и 12 (фиг.2) и вращающегося зеркала 10.
Режим световой завесы обеспечивается при неподвижных зеркалах 9 и 12 и вращающегося зеркала 11. При этом луч пробегает по прямой линии вдоль борта корабля.
Режим сканирования обеспечивает подтягивание обитающих в воде живых организмов к борту судна. Причем скорость луча не должна превышать 0,1 м/с, иначе рыба не успевает за движением луча.
Режим светового конуса обеспечивает концентрацию и длительное нахождение рыбы в заданном месте.
Режим световой завесы создает плоскость, препятствующую прохождению живых организмов.
Таким образом, предлагаемый способ обеспечивает возможность концентрации и удержания рыбы у борта судна, что является существенным отличием от других способов, которые позволяют только создать препятствие для прохождения рыб.
П р и м е р. Лазерный комплекс был испытана в Каспийском море. Все блоки установки показали свою работоспособность. Система сканирования перемещала луч на дальность до 2˙103 м и обратно. Скорость перемещения луча по морской поверхности менялась в пределах 0,05 до 20 м/с. Одновременно два аквалангиста вели наблюдение за перемещением рыбы в световом поле лазерного излучения. Исследования показали, что рыба не успевает за быстрыми перемещениями светового поля, но концентрируется в области светотени при медленном ( ≅0,1 м/с) перемещении излучения.
Теоретические оценки и экспериментальные результаты показали, что при использовании лазеров, обеспечивающих генерацию импульсов с мощностью 0,1-1,0 мВт, максимальная глубина проникновения в прибрежных водах составляет 40-50 м, а в прозрачных океанских водах может составлять 70-100 м, что соответствует уровню обитания промысловых живых организмов.
Способ испытывался при ловле кальмаров. Скорость передвижения лазерного луча была выбрана оптимальная для кальмаров - 0,5 м/с. После концентрации кальмаров при помощи предлагаемого способа (установка вначале работала в режиме сканирования, затем в режиме светового конуса) вылов их увеличился в 1,7 раза, по сравнению с обычным способом лова.
Технико-экономическая эффективность предлагаемого способа заключается в увеличении вылова живых организмов в 1,5-1,7 раза, за счет улучшения концентрации их у борта судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧЕЕ СРЕДСТВО | 1990 |
|
RU2013306C1 |
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ ТРАЛА | 1991 |
|
RU2029467C1 |
| ДИНАМОМЕТР БУКСИРОВОЧНОЙ ТЕЛЕЖКИ | 1993 |
|
RU2104206C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОШЕЛЬКОВОГО НЕВОДА | 1977 |
|
SU717811A1 |
| Способ приготовления корма для лососевых рыб | 1988 |
|
SU1584854A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВОЗДУШНО-ПУЗЫРЬКОВОЙ ЗАВЕСЫ ПРИ ЛОВЕ РЫБЫ | 1980 |
|
SU936501A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОШЕЛЬКОВОГО НЕВОДА | 1977 |
|
SU710117A1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1991 |
|
RU2090471C1 |
| Трал для лова рыбы | 1988 |
|
SU1565444A1 |
| АВТОМАТ ДЛЯ КРЕПЛЕНИЯ И ОТДАЧИ ТРАЛОВОЙ ДОСКИ | 1991 |
|
RU2031577C1 |
Использование: в промышленном рыболовстве, а именно в способах концентрации живых организмов перед выловом. Сущность способа: перемещают лазерный луч в сине-зеленой части спектра со скоростью ≅ 0,1 м/с по направлению к борту судна, за счет чего происходит увеличение вылова живых организмов. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЖИВЫХ ОРГАНИЗМОВ В ВОДЕ ПРИ ИХ ЛОВЕ С СУДНА с помощью лазерного излучения, отличающийся тем, что, с целью увеличения вылова живых организмов, лазерное излучение в сине-зеленой части спектра перемещают со скоростью меньше или равной 0,1 м/с по направлению к борту судна.
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Судно | 1925 |
|
SU1961A1 |
