Изобретение может быть использовано для стыковки кооперируемых космических аппаратов.
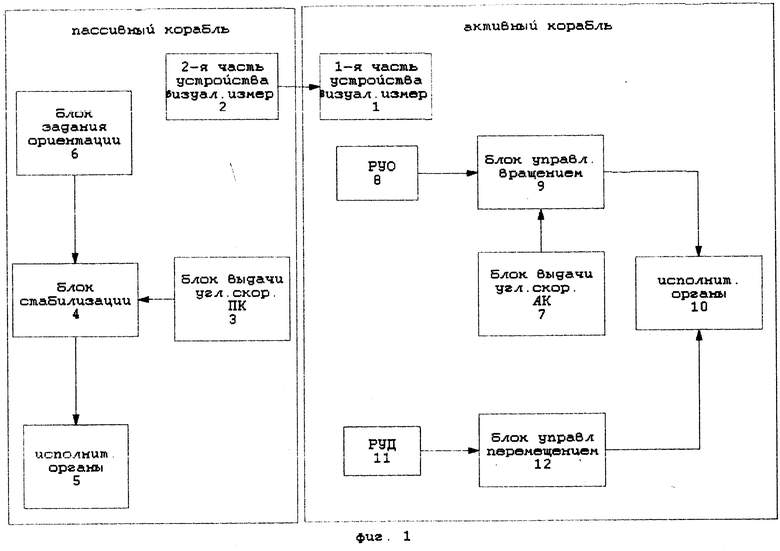
Известна система ручного управления причаливанием (см. фиг. 1), режим скоростного управления которой использовался на пилотируемых кораблях "Союз Т" и станции "Салют" для ручного управления причаливанием и стыковкой пилотируемых космических кораблей (Лебедева А.А. и Соколова В.В. Встреча на орбите. -М.: Машиностроение, 1969). Блок-схема системы управления приведена на фиг. 1.
Система состоит из устройства визуального измерения углов рассогласования активного корабля (АК) и пассивного корабля (ПК) относительно линии визирования, одна часть которого 1 размещена на АК, а другая 2 - на ПК, и из установленных на ПК блока выдачи угловой скорости ПК 3, блока стабилизации 4, исполнительных органов 5, блока задания ориентации 6, установленных на АК блока выдачи угловой скорости АК 7, ручки управления ориентацией РУО 8, блока управления вращением 9, исполнительных органов 10, ручки управления движением РУД 11, блока управления перемещением 12.
В аналоге устройство визуального измерения выполнено в виде оптического визира, установленного на ПК, - первая часть устройства визуального измерения 1 и реперного устройства (стыковочной мишени) - вторая часть устройства визуального измерения 2, устанавливаемого на ПК соосно с устройством визуального измерения. Стыковочная мишень состоит и круглого основания и вынесенного на штанге выносного креста. Ось штанги параллельна оси стыковочного механизма. Конструкции устройства на АК и ПК обеспечивают визуальные измерения всех необходимых для стыковки углов рассогласования: угла рассогласования АК относительно линии визирования, угла рассогласования ПК относительно линии визирования и угла взаимного крена.
В процессе причаливания находящийся на АК космонавт определяет параметры относительного движения по перемещению и угловому размеру ПК в поле зрения устройства визуального измерения и, отклоняя РУО и РУД, по сигналам которых из блоков 9 и 12 включается исполнительные органы 10, управляет движением вокруг центра масс и центра масс АК. Номинальное взаимное расположение АК и ПК, к которому стремится космонавт, корректируя положение АК, определяется по положению стыковочной мишени относительно перекрестия устройства визуального измерения и по положению выносного креста стыковочной мишени относительно ее основания.
Система обеспечивает стыковку, однако параметры стыковки определяются не только точностными характеристиками приборов, входящих в систему ручного управления, но и навыками, приобретенными космонавтом при подготовке, и его психологическим состоянием в полете. Кроме этого стыковка зависит от условий освещенности стыковочной мишени и ее видимости в визире.
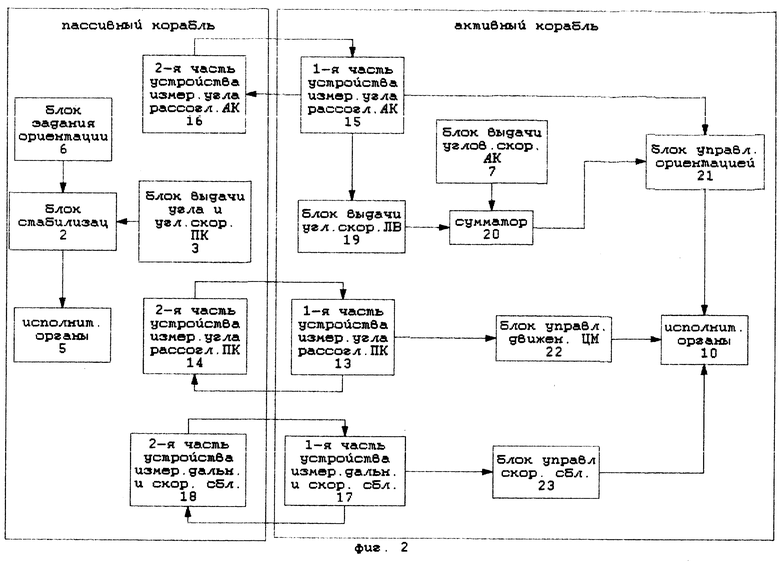
Известна система автоматического управления причаливанием (см. фиг. 2), которая используется на кораблях "Союз ТМ" (АК) и ОК "МИР" (ПК). Описание системы управления излагалось на лекциях на факультете Информатики и Управления МГТУ им. Баумана в 1995 - 1996 учебном году (Бранец В.Н. и др. "Построение системы управления движением транспортных кораблей "Союз Т, ТМ". Университетский сборник "Вестник", МГТУ им. Баумана).
Система состоит из установленных на ПК блока выдачи угловой скорости ПК 3, блока стабилизации 4, исполнительных органов 5, блока задания ориентации 6 и установленных на АК блока выдачи угловой скорости АК 7, исполнительных органов 10, блока выдачи угловой скорости линии визирования 19, сумматора 20, блока управления ориентацией 21, блока управления движением центра масс 22, блока управления скоростью сближения 23, а также из устройства измерения угла рассогласования ПК относительно линии визирования, одна часть аппаратуры которого 13 размещена на АК, а другая 14 - на ПК, устройства измерения угла рассогласования АК относительно линии визирования и угла взаимного крена, одна часть аппаратуры которого 15 размещена на АК, а другая 16 - на ПК, устройства измерения дальности и скорости сближения, одна часть аппаратуры которого 17 установлена на АК, а другая 18 - на ПК.
В прототипе устройства измерения углов рассогласования АК и ПК и устройства измерения дальности и скорости сближения выполнены в виде радиоаппаратуры, части которого размещены на АК и ПК. При этом чувствительные элементы измерителей углов установлены соосно со своим реперным устройством, размещенным на другом корабле. Измеренные углы рассогласования АК и ПК, а также дальность и скорость сближения выдаются в систему управления АК.
В процессе причаливания система управления обеспечивает стабилизацию ПК относительно выбранной системы координат. Выбор системы координат производится заблаговременно по результатам баллистических расчетов на Земле с учетом требований программы полета. Для поддержания стабилизированного положения используются блок выдачи угла и угловой скорости 3, блок стабилизации 4, исполнительные органы 5 и блок задания ориентации 8.
По сигналам угла рассогласования АК из блока 15 и угловой скорости рассогласования, получаемой на сумматоре 20 и которая является разностью показания блока выдачи угловой скорости АК 7 и сигнала угловой скорости линии визирования 19, организуется слежение АК по линии визирования. Для этого в блок управления ориентацией 21 поступают сигналы из блока 15 и сумматора 20, а его выход соединен с исполнительными органами 10.
Управление движением центра масс производится по углу рассогласования ПК, получаемому из блока 13, и сигналу угловой скорости линии визирования из блока 19, которые поступают в блок 22, где определяются моменты приложения управляющих импульсов для коррекции бокового движения центра масс.
Для управления скоростью сближения выход блока 17 через блок 23, в котором заложено программное изменение скорости от дальности, подключен к исполнительным органам 10.
Недостатком этой системы является взаимосвязь каналов управления движением центра масс и вокруг центра масс АК. АК одновременно выполняет и ориентацию по линии визирования и, перемещая центр масс, управляет положением линии визирования. На малых дальностях, начиная с 20-30 м между стыковочными плоскостями АК и ПК, начинает сказываться влияние мест установки чувствительных элементов измерителей углов на точность измерения. Вследствие их выноса к стыковочным плоскостям от центра масс в измеренных углах рассогласования ПК относительно линии визирования появляется дополнительная составляющая от углов разворота АК вокруг центра масс, а в измеренных углах рассогласования АК появляется дополнительная составляющая от колебаний ПК вокруг центра масс при поддержании стабилизированного положения.
Поскольку угловое движение ПК совершается с малыми угловыми скоростями, то период колебаний ее существенно больше периода колебаний движений центра масс и вокруг центра масс АК при причаливании. Вследствие этого движение ПК скорее возмущает процесс причаливания как статический параметр, который АК должен отследить. На АК завязка в измерениях приводит к тому, что любое изменение углового положения АК вокруг центра масс приводит к изменению угла рассогласования ПК (в момент касания значение коэффициента влияния от мест установки чувствительных элементов на ПК и АК для ОК "МИР" достигает примерно 2). Изменения углов ПК из-за изменения ориентации АК приводит к необходимости регулирования положения центра масс АК, после которого вследствие изменения положения АК, изменяется значение углов рассогласования АК и появляется необходимость вновь разворачивать АК вокруг центра масс. Такое построение системы ведет к чувствительности ее к ошибкам измерения, внешним возмущениям, колебательности и, как следствие, к ухудшению параметров стыковки в момент касания.
Техническим результатом изобретения является повышение точности автоматической стыковки с одновременным увеличением устойчивости в переходных процессах.
Технический результат достигается тем, что в систему автоматического управления причаливанием, состоящую из устройств измерения угла рассогласования АК относительно линии визирования, одна часть которого размещена на АК, а другая на ПК, устройств измерения дальности и скорости сближения, одна часть которого установлена на АК, а другая - на ПК, а также из установленных на ПК блока выдачи угловой скорости ПК, блока стабилизации, исполнительных органов, блока задания ориентации, причем выход блока задания ориентации через блок стабилизации, к второму входу которого подключены выходы блока выдачи угловой скорости ПК, подключен к исполнительным органам, и установленных на АК исполнительных органов, блока управления ориентацией, блока управления движением центра масс, блока управления скоростью сближения, причем выход блока управления ориентацией соединен с входом исполнительных органов, выход устройства измерения дальности и скорости сближения соединен с входом блока управления скоростью сближения, введены устройства визуального измерения углов рассогласования АК относительно линии визирования, одна часть которого установлена на АК, а другая - на ПК, а также ручка управления ориентацией (РУО) с линией связи, ручка управления движением (РУД) с линией связи и пульт управления с линией связи, расположенные вместе с экранной частью устройств визуального изменения в месте нахождения космонавта, а также установленные на АК блок задания ориентации, блок выдачи угла и угловой скорости АК, три сумматора, два блока запоминания, три блока коммутации, блок вычисления угла рассогласования, блок вычисления угловой скорости линии визирования, блок выдачи команд, блок выдачи команд переключения, блок управления перемещением, причем выход блока задания ориентации через первый сумматор, к второму входу которого подключен первый угловой выход блока выдачи угла и угловой скорости АК, второй сумматор, к другому входу которого подключен выход первого блока запоминания и первый блок коммутации, подключен к блоку управления ориентацией, к второму входу которого подключен первый скоростной выход блока выдачи угла и угловой скорости АК, выход РУО через линию связи подключен к третьему входу блока управления ориентацией и к выходу блока выдачи команд переключения, выходы которого соединены с входами первого блока запоминания и первого блока коммутации, первый выход устройства измерения угла рассогласования АК через блок вычисления угла рассогласования, к второму входу которого подключен второй угловой выход блока выдачи угла и угловой скорости АК, второй блок запоминания и третий сумматор, к второму входу которого подключен второй выход блока вычисления угла рассогласования, подключен к блоку управления движением центра масс, выход которого через второй блок коммутации соединен с вторым входом исполнительных органов, второй выход измерителя угла рассогласования АК через блок вычисления угловой скорости линии визирования, к второму входу которого подключен второй скоростной выход блока выдачи угла и угловой скорости АК, подключен к блоку управления движением центра масс, выход РУД через линию связи и блок управления перемещением, соединен с третьим входом исполнительных органов, выход блока управления скоростью сближения через третий коммутатор соединен с четвертым входом исполнительных органов, выход пульта управления через линию связи подключен к блоку выдачи команд, выходы которого соединены с вторым входом второго блока запоминания и вторыми выходами второго и третьего блоков коммутации.
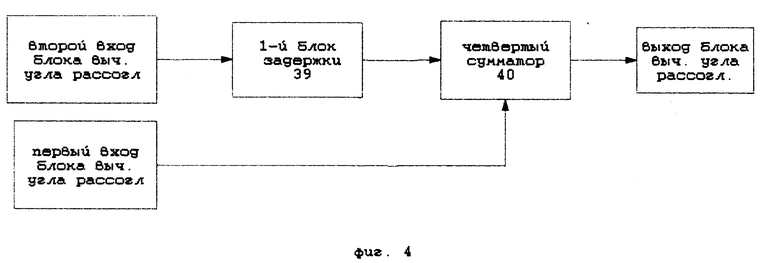
При этом блок вычисления угла рассогласования предлагается выполнить в виде первого блока задержки и четвертого сумматора, причем первый блок задержки, вход которого совпадает с вторым входом блока вычисления угла управления, соединен с входом четвертого сумматора, второй вход которого совпадает с первым входом блока вычисления угла управления, выход четвертого сумматора совпадает с выходом блока вычисления угла управления.
Блок вычисления угловой скорости линии визирования предлагает выполнить в виде второго блока задержки, двух сумматоров, усилителя и интегратора, причем выход пятого сумматора, первый вход которого совпадает с первым входом блока вычисления угловой скорости линии визирования, соединен с усилителем, один выход которого подключен к первому входу шестого сумматора, а другой выход - к второму входу пятого сумматора через интегратор, выход второго блока задержки, вход которого совпадает с вторым входом блока вычисления угловой скорости линии визирования, соединен с вторым входом шестого сумматора, выход которого совпадает с выходом блока вычисления угловой скорости линии визирования.
Технический результат достигается за счет того, что в предложенном построении системы отсутствует взаимосвязь каналов управления, в том числе и на малых расстояниях, вызываемая геометрией размещения чувствительных элементов измерителей углов рассогласования на АК и ПК и соответствующих реперных устройств. В процессе причаливания АК вокруг центра масс стабилизируется относительно той же системы координат, что и ПК, а потому их связанные системы координат параллельны в пространстве. Стабилизационные колебания АК при поддержании заданной системы координат, совершающиеся с малой угловой скоростью, существенно меньше влияют на измерения углов рассогласования АК относительно линии визирования, а потому и в меньшей степени возмущают движение центра масс АК.
По углам рассогласования АК относительно линии визирования и вычисленным составляющим угловой скорости линии визирования организуется управление движением центра масс АК для совмещения его продольной оси с осью стыковочного механизма ПК. Такое построение системы обеспечивает независимость каналов управления, уменьшает колебания параметров движения и повышает устойчивость системы, а конечная цель причаливания - стыковка - производится с ошибками, не превышающими расчетных значений, вычисленных с учетом максимальных ошибок измерений и значений зон нечувствительности в блоках управления ориентацией и управления движением центра масс.
На величину взаимного перекоса осей при предлагаемом построении системы окажет влияние тепловая деформация корпусов АК и ПК от нагрева Солнцем. И если для АК, размеры которых относительно небольшие и конструкция достаточно жесткая, ошибки от тепловой деформации незначительны (не более 0,5-1o), то для ПК, размеры которых могут достигать многих десятков метров при относительно невысокой жесткости, величина ошибки может быть существенно больше.
Вследствие изложенных причин в предлагаемое техническое решение вводится коррекция ошибок для устранения их влияния на параметры в момент касания. Для этого предлагается использовать систему ручного управления причаливанием.
На фиг. 1 и 2 представлены блок-схемы аналога и ближайшего аналога; на фиг. 3 - вариант системы с космонавтом на активном корабле; на фиг. 4 и 5 - схемы блоков вычисления угла рассогласования и угловой скорости линий визирования.
Коррекция ошибок с помощью системы ручного управления производится следующим образом.
Ведя контроль автоматического процесса причаливания, космонавт по наблюдению движения изображения ПК (или стыковочной мишени, установленной на ПК) на экране устройства визуального измерения следит за тем, чтобы угловые перемещения ПК (или стыковочной мишени) относительно сетки экрана и расхождение выносного креста стыковочной мишени относительно ее основания не превышали допустимых значений. При их превышении космонавт включает ручной контур управления командой с пульта управления и, управляя боковым движением центра масс АК, выполнит дооблет ПК с тем, чтобы выносной крест стыковочной мишени совпал с крестом ее основания, и разворот АК вокруг центра масс для того, чтобы перекрестие визирного устройства совпало с выносным крестом стыковочной мишени. Это новое положение АК будет началом отсчета для скорректированной с учетом ошибок выставки АК и ПК системы координат для АК. Новое положение задается командами из блока выдачи команд переключения и пульта управления. После этого космонавт выключает контур ручного управления и стыковка производится в автоматическом режиме.
Из описанного выше следует, что для ручной коррекции ошибок необходимо, чтобы в том месте, где находится космонавт, были расположены экранная часть устройств визуального измерения, РУО, РУД, пульт управления и соединяющие их с соответствующими блоками, расположенными на АК, линии связи. Поэтому коррекция ошибок может быть произведена не только в том случае, когда космонавт находится на АК. Если космонавт находится на ПК или на Земле (например, в Центре управления полетом), то и в этом случае можно производить ручную коррекцию ошибок. Для этого линии связи должны соединить РУО, РУД, пульт управления и экранную часть устройства визуального измерения с соответствующими блоками на АК.
По этому приему, называемому телеоператорным управлением, реализовано ручное управление беспилотными грузовыми кораблями "Прогресс М". Для этого создано рабочее место на ОК "МИР", а линии связи соединили упомянутые выше необходимые блоки с блоками на АК. В качестве устройства визуального измерения в этой системе применяется телевизионная камера, которая устанавливается на АК соосно со стыковочной мишенью, а изображение с нее с помощью телевизионных передатчика и приемника передается на ОК "МИР" и выводится на монитор на рабочем месте космонавта. Линии связи выполнены с применением радиоканала между "Прогресс М" и ОК "МИР".
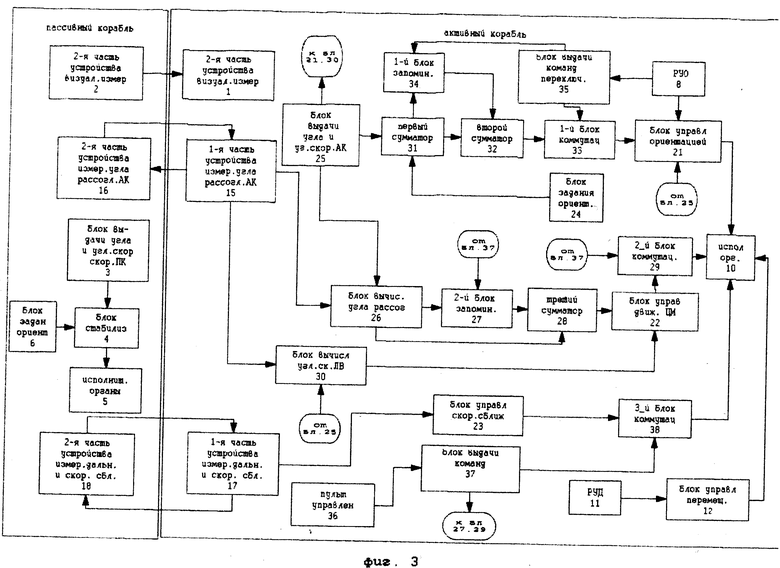
Для пояснения сути изобретения будем рассматривать вариант, когда космонавт находится на АК. Блок-схема этой системы приведена на фиг. 3, а также фиг. 4 и 5, на которых приведены блок-схемы построения блоков вычислений угла рассогласования и угловой скорости линии визирования.
Система состоит из устройств визуального измерения углов рассогласования, части которого установлены на АК 1 и ПК 2, из установленных на ПК блока выдачи угла и угловой скорости ПК 3, блока стабилизации 4, исполнительных органов 5, блока задания ориентации 6 и установленных на АК РУО 8, исполнительных органов 10, РУД 11, блока управления перемещением 12, блока управления ориентацией 21, блока управления движением центра масс 22, блока управления скоростью сближения 23, блока задания ориентации 24, блока выдачи угла и угловой скорости АК 25, блока вычисления угла рассогласования 26, второго блока запоминания 27, третьего сумматора 28, второго блока коммутации 29, блока вычисления сумматора 31, второго сумматора 32, первого блока коммутации 33, первого блока запоминания 34, блока выдачи команд переключения 35, пульта управления 36, блока выдачи команд 37, третьего блока коммутации 38, а также из устройства измерения угла рассогласования АК относительно линии визирования, части аппаратуры которого 15 и 16 размещены на АК и ПК, и устройств измерения дальности и скорости сближения, части аппаратуры которого 17 и 18 установлены на АК и ПК.
На ПК выход блока 3 через блок 4, к второму входу которого подключен выход блока 6, соединен с блоком 5.
На АК выход блока 11 через блок 12 соединен с блоком 10. Выход блока 15 подключен к входам блоков 26 и 30. Угловой выход блока 25 соединен с блоками 26 и 31, а скоростной - с блоками 21 и 30. Выход блока 26 через блок 27, 28, второй вход которого соединен с вторым выходом блока 26, блоки 22 и 29 подключен к блоку 10. Выход блока 30 соединен с вторым входом блока 22. Выход блока 24 соединен с блоком 31. Выход блока 31 через блоки 32, 33 и 21 соединен с блоком 10. Второй выход блока 31 через блок 34 соединен с вторым входом блока 32. Выход блока 8 соединен с блоками 21 и 35. Выход блока 35 соединен с блоками 33 и 34. Выход блока 36 соединен с блоком 37, выходы которого соединены с блоками 27, 29 и 38.
Блок вычисления угла рассогласования 26, приведенный на фиг. 4, состоит из первого блока задержки 39 и четвертого сумматора 40. Причем к входу блока 40 подключен выход блока 39.
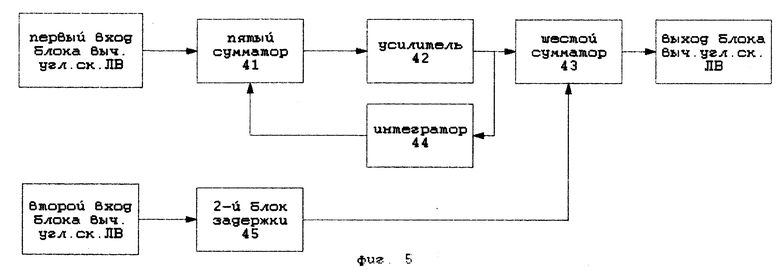
Блок вычисления угловой скорости линии визирования 30, приведенный на фиг. 5, состоит из пятого сумматора 41, усилителя 42, шестого сумматора 43, интегратора 44 и второго блока задержки 45. Причем выход блока 41 через блок 42 соединен с блоком 43. Второй выход блока 41 через блок 44 соединен с вторым входом блока 39. Выход блока 45 соединен с вторым входом блока 43.
Для управления ориентацией АК относительно заданной системы координат на вход первого сумматора 31 поступает сигнал из блока 24 и угловой выход блока выдачи угла и угловой скорости АК 25. Выход первого сумматора 31 соединен с входами второго сумматора 32 и первого блока запоминания 34, выход которого также соединен с входом второго сумматора 32. На выходе первого блока запоминания 34 до проведения коррекции ошибок, факт проведения которой для блока 34 определяется командой из блока выдачи команд переключения 35, сигнал равен нулю. После прихода команды из блока 35 первый блок запоминания 34 запоминает текущее значение вычисленного в блоке 31 угла рассогласования. С этого момента времени на выходе второго сумматора угол рассогласования, поступающий в блок управления ориентацией 21, отсчитывается от смещенного на величину ошибки значения. В дальнейшем сигнал на выходе первого блока запоминания 34 не изменяется до прихода новой команды. Для демпфирования углового движения АК в блок 21 поступает скоростной выход блока выдачи угла и угловой скорости АК 25. По сигналам блока 21, соединенного с исполнительными органами 10, включаются двигатели для изменения скорости вращения АК.
Для управления боковым движением центра масс АК производится вычисление угла рассогласования АК относительно заданной на АК системы координат. Для этого выход устройства измерения угла рассогласования АК 15 соединен с входом блока вычисления угла рассогласования 26, к второму входу которого подсоединен угловой выход блока выдачи углов и угловой скорости АК 25. Вычисленный угол направляется в третий сумматор 28 и второй блок запоминания 27, выход которого соединен с вторым входом третьего сумматора 28. На выходе второго блока запоминания 27 до проведения коррекции ошибок, факт проведения которой для блока 27 определяется командой с пульта управления 36, прошедшей блок выдачи команд 37, сигнал равен нулю. После прихода команды из блока 36 второй блок запоминания 27 запоминает текущее значение вычисленного блоком 26 угла рассогласования. С этого момента времени на выходе третьего сумматора 28 угол рассогласования, поступающий в блок управления движением центра масс 22, отсчитывается от смещенного на величину ошибки значения. В дальнейшем сигнал на выходе второго блока запоминания 27 не изменяется до прихода каждой новой команды. Для демпфирования бокового движения в блок управления движением центра масс 22 поступает угловая скорость линии визирования, вычисленная в блоке 30. Для ее вычисления на вход блока поступает сигнал из блока 15 и скоростной выход блока выдачи угла и угловой скорости АК 25. На время проведения маневров АК с помощью контура ручного управления выход блока 22 отключается от исполнительных органов 10. Эту процедуру выполняет второй блок коммутации 29 по команде из блока 36.
Для выполнения изменения ориентации АК при выборе ошибок выход РУО 8 соединен с блоком 21 и блоком формирования команд переключения 35. При появлении сигнала на выходе блока 8 блок 33 отключает выход второго сумматора 32 от входа блока управления ориентацией с помощью третьего блока коммутации 33 для обеспечения вращения АК с угловой скоростью, заданной величиной сигнала РУО. При пропадании сигнала на выходе блока 8 блок 35 выдает команды в блоке 34 на запоминание текущего значения угла на выходе первого сумматора 31 и в блок 33 на разрешение поступления вычисленного во втором сумматоре 32 угла в блок 21 для выполнения автоматической ориентации относительно нового, заданного космонавтом положения. Эта ориентация поддерживается автоматически до новой ручной коррекции.
Для выполнения дооблета при ручной коррекции ошибок выход РУД 11 через блок управления перемещением 12, в котором по сигналам блока 11 формируются команды на включение двигателей для бокового перемещения центра масс, соединен с исполнительными органами 10. Для обеспечения ручного управления движением центра масс по команде с пульта управления 36 с помощью блоков 29 и 37 отключается связь между блоком управления скоростью сближения 38 и исполнительными органами, а с помощью блоков 37 и 38 между блоком управления движением центра масс 22 и исполнительными органами.
В блоке вычисления угла рассогласования 26 необходимый для управления угол, определяющий положение линии визирования относительно выбранной системы координат, получается (см. фиг. 4) в блоке 40 при вычитании угла рассогласования АК относительно линии визирования из угла, определяющего положение связанной системы координат относительно заданной. Предварительно угол, определяющий положение АК относительно выбранной системы координат в первом блоке задержки 39, задерживается для приведения во временное соответствие с углом рассогласования АК относительно линии визирования, полученном в блоке 15.
В блоке вычисления угловой скорости линии визирования 30 необходимая для управления информация получается (см. фиг. 5) при вычитании в блоке 43 угловой скорости рассогласования, получаемой дифференцированием угла рассогласования АК относительно линии визирования, из угловой скорости АК вокруг центра масс. Дифференцирование производится путем включения интегратора 44 в обратную связь усилителя 42. Для приведения во временное соответствие получаемой производной с угловой скоростью АК последняя задерживается во втором блоке задержки 45 на время, соответствующее моменту получения угловой скорости рассогласования.
Предложенная система управления может быть реализована известными техническими решениями.
Устройства визуального измерения 1, 2 должны состоять из двух частей. Одна часть должна обеспечивать измерение углов рассогласования корабля, на котором эта часть установлена. Например, стыковочная мишень, конструкция которой описана в тексте, обеспечивает измерение необходимых углов того корабля, на котором она установлена. Другая часть должна обеспечивать наблюдение первой части, в рассматриваемом случае стыковочной мишени, и должна устанавливаться на другом корабле. На каком именно - АК или ПК должна устанавливаться та или иная часть - не принципиально для рассматриваемого технического решения (и ручного управления причаливанием также), и места их установки определяются только соображениями технической целесообразности. Часть устройства, обеспечивающего визуальное наблюдение первой части, может быть выполнена или в виде оптического визира, как это реализовано в аналоге, или на основе телевизионной камеры и соответствующего телевизионного канала связи до места нахождения рабочего места космонавта, как при телеоператорном управлении ручным причаливанием беспилотных космических кораблей.
Линии связи РУО, РУД и пульта управления, если космонавт находится на АК, реализуется с помощью кабелей, а устройство визуального измерения с помощью оптического прибора или телевизионной камеры и монитора, на которой выводится изображение. Если космонавт не находится на АК, то линии связи реализуются с помощью радиоаппаратуры, которая передает управляющие сигналы ручек и команды пульта, и телевизионного канала связи от телекамеры, расположенной на АК монитора, установленного в месте нахождения космонавта, как это реализовано в телеоператорном управлении беспилотными грузовыми кораблями "Прогресс М" с ОК "МИР".
Блоки задания ориентации 6, 24 необходимые углы положения могут отсчитывать от орбитальной или инерциальной системы координат. Любая из систем на ОК "МИР" и кораблях "Союз ТМ" строится или с использованием инфракрасной вертикали, измеряющей углы относительно горизонта Земли, или с использованием датчиков Солнца и звезды.
В качестве устройства измерения углов рассогласования АК 15, 16 относительно линии визирования может использоваться радиоаппаратура, применяемая на ОК "МИР" и кораблях "Союз ТМ".
В качестве измерителя угла рассогласования АК 15, 16 относительно линии визирования может использоваться радиоаппаратура, применяемая на ОК "МИР" и кораблях "Союз ТМ".
Блоки выдачи углов и угловых скоростей АК и ПК 3, 25 могут быть выполнены на основе датчиков угловой скорости, используемых на ОК "МИР" и кораблях "Союз ТМ", являющихся стандартными гироскопическими приборами.
Исполнительные органы 5, 10 - реактивные двигатели.
В качестве устройства измерения дальности и скорости сближения 17, 18 может использоваться радиоаппаратура, применяемая на ОК "МИР" и кораблях "Союз ТМ".
Блок стабилизации 4, блок управления ориентации 21, блок управления движением центра масс 22, функционально имеющие одно и то же назначение, могут быть выполнены с помощью стандартных усилителей, сумматоров и нелинейностией. В каждом из этих блоков входная информация состоит из параметра управления (угла) и его производной (угловой скорости). В каждом из блоков управления может формироваться используемым обычно приемом - созданием управляющего сигнала, равного ,
,
где q - управляющий сигнал;
ϕ - угол рассогласования; - скорость рассогласования;
- скорость рассогласования;
k - коэффициент демпфирования.
При превышении управляющим сигналом заданного значения релейный элемент формирует команду на включение исполнительных органов.
Блок управления скоростью сближения 23 может быть выполнен на основе стандартных усилителей, сумматоров и релейных элементов. На участке причаливания программное изменение скорости сближения от дальности может быть представлено в виде максимально и минимально допустимых значений скорости, которые изменяются в зависимости от дальности. На рассматриваемом участке причаливания достаточно двух переключений на дальности 100 и 50 м.
В диапазоне дальности:
200-100 м допустимая скорость должна лежать в пределах 1-2 м/с;
100-50 м допустимая скорость должна лежать в пределах 0,5-1 м/с;
50-0 м допустимая скорость должна лежать в пределах 0,1-0,3 м/с.
Сумматоры 28, 31, 32 - стандартные линейные усилители. Блоки запоминания 27, 34 могут быть выполнены на стандартных усилителях и релейных элементах. Пульт управления 36, блок выдачи команд переключения 35, блок выдачи команд 37, блоки коммутации 27, 29, 33, 38 могут быть выполнены на основе стандартных кнопочных плат, усилителей и реле.
Блок вычисления угловой скорости линии визирования 30 может быть выполнен на основе стандартных усилителей, сумматоров, интеграторов. Блок вычисления угла рассогласования 26 может быть выполнен на основе стандартных усилителей и сумматоров.
Блок управления перемещением 12 может быть выполнен с использованием стандартных усилителей и нелинейностей.
РУО 8 и РУД 11 могут быть выполнены на основе ручек управления с тремя степенями свободы и тремя потенциометрами, установленными на каждой из осей вращения.
Изобретение может быть использовано для стыковки кооперируемых космических аппаратов. Сущность: система автоматического управления причаливанием состоит из устройства измерения угла рассогласования активного корабля (АК) относительно линии визирования, устройства измерения дальности и скорости сближения и установленных на пассивном корабле (ПК) блока выдачи угловой скорости ПК, блока стабилизации, исполнительных органов, блока задания ориентации, и установленных на АК исполнительных органов, блока управления ориентацией, блока управления движением центра масс, блока управления скоростью сближения, устройства визуального измерения углов рассогласования АК относительно линии визирования, блока задания ориентации, блока выдачи угла и угловой скорости АК, трех сумматоров, двух блоков запоминания, трех блоков коммутации, блока вычисления угла рассогласования, блока вычисления угловой скорости линии визирования, пульта управления, блока выдачи команд, ручки управления ориентацией, блока выдачи команд переключения, ручки управления движением, блока управления перемещением. Предлагаемая система автоматического управления осуществляет процесс причаливания, корректируя боковое движение центра масс АК по вычисляемому углу положения линии визирования относительно выбранной системы координат, текущее значение которого определяется с учетом измерений угла рассогласования АК относительно линии визирования. Относительно этой же системы координат осуществляется ориентация АК и ПК, чем обеспечивается параллельность их связанных осей в пространстве. Коррекция непараллельности осей АК и ПК в пространстве с помощью системы ручного управления причаливанием устраняет возможные ошибки в ориентации АК и ПК и ошибки установки устройства измерения угла рассогласования АК относительно линии визирования. 2 з.п. ф-лы, 5 ил.
| Бранец В.Н | |||
| и др | |||
| Построение системы управления движением транспортных кораблей "Союз-Т, ТМ" Университетский сборник "Вестник" | |||
| - М.: МГТУ им.Баумана, 1996, с.5-25. |

