Система автоматического управления причаливанием может быть использована для стыковки кооперируемых космических аппаратов.
Известна система автоматического управления причаливанием, реализующая способ, описанный в патенте №2131387 от 10.06.99.
Система использует только измерения углов рассогласования АК относительно линии визирования, по которым производится управление боковым движением центра масс активного корабля (АК) при причаливании. Вокруг центра масс АК перед переходом к автоматическому причаливанию ориентирует относительно той же системы координат, относительно которой ориентируется пассивный корабль (ПК). В продольном канале осуществляется управление скоростью сближения в зависимости от дальности.
Такое построение системы обеспечивает независимость каналов управления движением центра масс и вокруг центра масс АК, но промах в момент касания в этой системе зависит от ошибок построения систем координат на АК и ПК и их уходов, поскольку системы координат строятся предварительно за не менее чем один виток до начала причаливания.
Известна система автоматического управления причаливанием, выбранная в качестве прототипа, в которой для коррекции возможных ошибок построения и ухода систем координат АК и ПК производится их коррекция по углам рассогласования ПК относительно линии визирования. Алгебраическая сумма измеренных углов рассогласования АК и ПК вводится как поправка в систему координат АК, относительно которой производится стабилизация АК при причаливании. Система описана в патенте № 2104234 от 10.02.98.
Перед началом причаливания АК ориентируется относительно той же системы координат, в которой ориентирован ПК. По окончании переходного процесса управление боковым движением центра масс осуществляется по вычисленным углам линии визирования и угловой скорости линии визирования.
В продольном канале производится регулирование скорости сближения в зависимости от дальности. Закон управления предусматривает ступенчатую зависимость программной скорости сближения в зависимости от дальности.
На заранее заданной дальности производится коррекция системы координат АК по углам рассогласования ПК и АК относительно линии визирования. Для этого вычисляется разность углов рассогласования АК и ПК относительно линии визирования, на величину которой и изменится ориентация АК относительно заданной системы координат. После окончания переходного процесса возобновляется управление боковым движением центра масс АК по вычисленным значениям угла и угловой скорости линии визирования.
Система автоматического управления причаливанием состоит из блока выдачи углов рассогласования ПК относительно линии визирования, первая часть которого размещена на АК, а вторая часть на ПК, блока выдачи углов рассогласования АК относительно линии визирования и угла взаимного крена, первая часть которого размещена на АК, вторая часть на ПК, блоков выдачи дальности и скорости, первые части которых размещены на АК, а вторые части на ПК, а также из установленных на ПК блока задания ориентации, датчика угловой скорости ПК, блока стабилизации и исполнительных органов.
На АК установлены блок задания ориентации, датчик угловой скорости, исполнительные органы, блок управления скоростью сближения, блок управления ориентацией, блок управления движением центра масс, блок вычисления угла рассогласования, блок вычисления угловой скорости линии визирования, блок выдачи команд управления, блок задания ориентации, два сумматора, блок запоминания.
Недостатком системы является то обстоятельство, что описанное использование измеренных углов рассогласования АК и ПК для коррекции систем координат требует знания их относительно центра масс АК. Пересчет углов можно и не проводить, но тогда коррекции необходимо проводить на больших расстояниях, когда можно пренебрегать выносом измерительных антенн от центров масс АК и ПК по сравнению с расстоянием между стыкующимися кораблями. Однако измерение углов рассогласования ПК на больших расстояниях усложняет систему измерения углов. При проведении коррекции на малых расстояниях для пересчета углов нужно измерять расстояние между АК и ПК с точностью, чтобы ошибки измерения дальности не влияли на точность пересчета. Требование измерения расстояния на малых расстояниях неоправданно усложняет дальномерный канал, поскольку для управления скоростью сближения дальность достаточно измерять до расстояния до 10 - 15 м между АК и ПК.
Задачей изобретения является повышение точности стыковки с одновременным устранением связи между ошибками измерения дальности и управлением боковым движением центра масс АК.
Поставленная задача достигается тем, что в систему автоматического управления причаливанием, состоящую из блока выдачи углов рассогласования ПК и АК относительно линии визирования, первые части которых размещены на АК, а вторые части на ПК, блоков выдачи дальности и скорости сближения, первые части которых размещены на АК, а вторые части на ПК, а также из установленных на ПК блока задания ориентации ПК, датчика угловых скоростей, блока управления ориентацией и исполнительных органов, причем выход блока задания ориентации ПК, к входу которого подключен выход датчика угловых скоростей, через блок управления ориентацией, ко второму входу которого подключен выход датчика угловых скоростей, соединен с исполнительными органами, а также из установленных на АК блоков задания ориентации АК, вычисления углов линии визирования, вычисления угловой скорости линии визирования, управления движением центра масс, управления ориентацией, управления скоростью сближения, датчика угловых скоростей, блока определения дальности коррекции и исполнительных органов, причем выход блока выдачи углов рассогласования АК соединен с блоком вычисления углов линии визирования, а через блок вычисления угловой скорости линии визирования и блок управления движением центра масс соединен с исполнительными органами, выход датчика угловых скоростей соединен с блоками задания ориентации АК и вычисления угловой скорости линии визирования, а через блок управления ориентацией - с исполнительными органами, выход блока задания ориентации АК соединен с блоком вычисления углов линии визирования, выходы блоков выдачи дальности и скорости сближения через блок управления скоростью сближения соединены с исполнительными органами, выход блока выдачи дальности соединен также с блоком определения дальности коррекции, отличающаяся тем, что в систему введены два блока определения моментов окончания коррекции, блок вычисления положения центра масс и первый, второй, третий, четвертый и пятый блоки коммутации, причем выход блока выдачи углов рассогласования ПК через первый блок коммутации соединен с входом первого блока определения момента окончания коррекции, а через второй блок коммутации, к другим входам которого подключены выходы блоков вычисления углов линии визирования и положения центра масс, соединен с блоком управления движением центра масс, выход блока выдачи углов рассогласования АК через третий блок коммутации соединен со вторым блоком определения момента окончания коррекции, а через пятый блок коммутации, к другому входу которого подключен выход блока задания ориентации АК, соединен с блоком управления ориентацией АК, выход блока вычисления угловой скорости линии визирования через четвертый блок коммутации соединен с блоком вычисления положения центра масс, выход блока определения дальности коррекции (f) соединен с входами первого и второго блоков коммутации, выход первого блока определения момента окончания коррекции (т) соединен с входами второго, третьего, четвертого и пятого блоков коммутации, выход второго блока момента окончания коррекции (n) соединен с входами второго и пятого блоков коммутации, а также с блоком задания ориентации АК.
Технический результат достигается за счет того, что коррекция ошибок построения ориентации АК и ПК относительно одной и той же системы координат производится сначала обнулением прямых измерений углов рассогласования ПК путем перемещения центра масс АК, а затем обнулением прямых измерений углов рассогласования АК путем разворота АК вокруг центра масс. Использование прямых измерений не требует введения поправок в измеренные углы рассогласования из-за выноса чувствительных элементов от центров масс на АК и ПК, как это требуется в прототипе. Поэтому использование прямых измерений исключает влияние ошибок измерения дальности на точность коррекции и, как следствие, на точность стыковки.
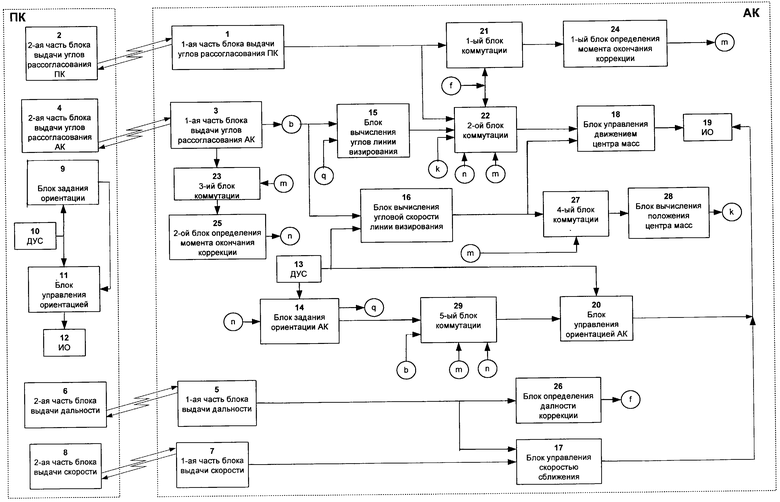
Суть изобретения может быть пояснена с помощью чертежа. Система автоматического управления причаливанием состоит из блока выдачи углов рассогласования ПК относительно линии визирования, части которого (1) и (2) размещены на АК и ПК, блока выдачи углов рассогласования АК относительно линии визирования, части которого (3) и (4) размещены на АК и ПК, блоков выдачи дальности и скорости сближения, части которого (5), (6), (7) и (8) также установлены на АК и ПК. Кроме этого на ПК установлены блок задания ориентации ПК (9), датчик угловой скорости - ДУС (10), блок управления ориентацией ПК (11) и исполнительные органы - ИО (12). При этом выход блока 9, к входу которого подключен выход блока 10, через блок 11, ко второму входу которого подключен выход блока 10, соединен с блоком 12.
На АК установлены также датчик угловых скоростей - ДУС (13), блок задания ориентации АК (14), блок вычисления углов линии визирования (15), блок вычисления угловой скорости линии визирования (16), блок управления скоростью сближения (17), блок управления движением центра масс (18), исполнительные органы - ИО (19), блок управления ориентацией АК (20), первый, второй, третий, четвертый и пятый блоки коммутации (21, 22, 23, 27 и 29), первый и второй блоки определения момента окончания коррекции (24 и 25), блок определения дальности коррекции (26), блок вычисления положения центра масс (28).
Выход блока 1 через блок 21 соединен с блоком 24, а через блок 22, к другим входам которого подключены блоки 15 и 28, и блок 18 соединен с блоком 19.
Выход блока 3 соединен с блоком 15, к другому входу которого подключен блок 14, а через блок 16, к другому входу которого подключен блок 13, соединен с блоками 18 и 27, а через блок 23 соединен с блоком 25, а через блок 29, к другому входу которого подключен блок 14, соединен с блоком 20, к другому входу которого подключен блок 13. Выход блока 20 соединен с блоком 19. Выход блока 27 через блок 28 соединен с блоком 22.
Выход блока 24 соединен с блоками 22, 23, 27, 29. Выход блока 24 соединен с блоками 22 и 29.
Выход блока 5 соединен с блоком 26, а через блок 17, к другому входу которого подключен выход блока 7, соединен с блоком 19. Выход блока 26 соединен с блоками 21 и 22.
При причаливании управление движением центра масс осуществляется по углам линии визирования, которые вычисляются в блоке 15 по измеренным углам рассогласования АК относительно линии визирования (блок 3) и выданным из блока задания ориентации АК (блок 14) углам АК относительно заданной системы координат. Углы из блока 15 через второй блок коммутации (22) поступают в блок управления движением центра масс (18), на второй вход которого поступает вычисленная в блоке 16 угловая скорость линии визирования. Блок 18 производит включение исполнительных органов (19). Для вычисления угловой скорости линии визирования в блок 16 выдаются углы рассогласования АК относительно линии визирования из блока 3 и угловые скорости АК вокруг центра масс из блока 13.
Для коррекции ошибок построения систем координат АК и ПК на заранее заданном расстоянии между АК и ПК, момент наступления которого устанавливает блок определения дальности коррекции (26), блок 26 формирует команду, которая транслируется в первый и второй блоки коммутации (блоки 21 и 22). По этой команде первый блок коммутации (21) пропускает сигнал блока выдачи углов рассогласования ПК (5) относительно линии визирования в блок определения момента окончания коррекции (24), а второй блок коммутации (22) подключает сигнал блока (1) к входу блока управления движением центра масс (13) и одновременно разрывает цепь, по которой выход блока вычисления углов линии визирования (15) поступает на вход блока 18. Произведенное переключение в системе управления подключит углы рассогласования ПК к блоку управления движением центра масс АК (18) вместо углов из блока вычисления углов линии визирования (15). Если углы рассогласования ПК окажутся больше заданных в блоке 18 допустимых значений (задается величиной зоны нечувствительности релейного элемента), то включатся ИО (19) для обнуления этих углов.
В момент, когда углы рассогласования ПК обнуляться, первый блок определения момента окончания коррекции (24) сформирует команду (на фиг.1 обозначена индексом m), которая поступит во второй (22), третий (23), четвертый (27) и пятый (29) блоки коммутации.
По команде из блока 24 блок 22 разорвет цепь подачи углов рассогласования ПК из блока 1 в блок управления движением центра масс (18). Вместо них блок 22 пропустит углы, которые начнет интегрировать блок вычисления положения центра масс 28. Блок 27, получив команду из блока 24, выдаст угловую скорость линии визирования из блока 16 на вход блока 28 для интегрирования.
По той же команде из блока 24 углы рассогласования АК (блок 3) блок 23 пропустит во второй блок определения момента окончания коррекции (блок 25), а блок коммутации 29 на вход блока управления ориентацией (блок 20) вместо углов из блока задания ориентации (14) пропустит углы рассогласования АК из блока 3. Если углы рассогласования АК окажутся больше заданных в блоке 20 допустимых значений (задается величиной зоны нечувствительности релейного элемента), то включатся ИО (19) для обнуления этих углов. Когда углы обнулятся, блок 25 выдаст команду (на фиг.1 обозначена индексом n), которая заставит блок 22 вновь подключить углы из блока 15 к блоку 18, а блок 29 вновь подключит углы из блока 14 к блоку 20. По этой же команде блока 25 в блоке задания ориентации (14) запомнится значение угла, на который развернулся АК за время обнуления углов рассогласования АК относительно линии визирования, и на выходе блока появятся углы относительно нового запомненного положения.
Таким образом, за время коррекции АК сначала сместит свой центр масс для обнуления углов рассогласования ПК относительно линии визирования, а затем АК развернется вокруг центра масс для обнуления углов рассогласования АК относительно линии визирования. Во время этого разворота центр масс АК будет стабилизироваться относительно положения, которое было достигнуто в момент обнуления углов рассогласования ПК. В момент обнуления углов рассогласования АК относительно линии визирования запомнятся углы разворота АК вокруг центра масс. После этого процесс причаливания снова возобновится. Управление боковым движением центра будет производиться по вычисленным через углы рассогласования АК относительно линии визирования углам положения линии визирования, а ориентация АК вокруг центра масс выполняться относительно смещенного на величину запомненных углов положения.
В продольном канале управления выдерживается программное значение скорости сближения в зависимости от дальности. Для этого выходы блоков 5 и 7 через блок управления скоростью сближения (17), где текущие значения сравниваются с программными и определяются моменты приложения управляющих импульсов, их длительность и формируются команды на исполнительные органы.
Предложенная система управления может быть реализована известными техническими решениями.
Ориентация АК и ПК относительно одной и той же системы координат может быть реализована так же, как это делается на ОК “Мир” и кораблях "Союз ТМ". При построении орбитальной системы координат на этих объектах используется инфракрасная вертикаль, а при построении инерциальной системы координат солнечный и звездные датчики. Запоминание построенной системы координат в блоках задания ориентации ПК и АК (блоки 9 и 14) и отсчет углового рассогласования от заданного положения может выполняться с помощью стандартных интеграторов, на вход которых должны подаваться угловые скорости вокруг центра масс ПК и АК (соответственно блоки 10 и 13).
Датчики угловых скоростей ПК и АК (10, 13) могут быть выполнены на основе датчиков угловой скорости, используемых на ОК "МИР" и кораблях "Союз ТМ", являющимися стандартными гироскопическими приборами, выходная информация которых - угловая скорость вокруг центра масс.
В качестве блоков выдачи углов рассогласования АК (3, 4) и ПК (1, 2) относительно линии визирования может использоваться радиоаппаратура, применяемая на ОК "МИР" и кораблях "Союз ТМ".
В блоке вычисления угла линии визирования (15) из угла рассогласования АК относительно заданной системы координат вычитается угол рассогласования АК относительно линии визирования. Полученная разность - угол положения линии визирования используется для управления движением центра масс. Блок 15 может быть реализован на основе стандартных усилителей постоянного тока.
Необходимая для управления угловая скорость линии визирования в блоке 14 получается следующим образом. Вычисляется производная от угла рассогласования АК относительно линии визирования (дифференцирование осуществляется с помощью интегратора, включенного в обратную связь усилителя с большим коэффициентом усиления). Берется угловая скорость АК вокруг центра масс, пропускается через звено с такой же передаточной функцией, с какой получается угол рассогласования АК относительно линии визирования (апериодическое звено первого порядка), и из полученного сигнала вычитается значение вычисленной производной. Полученный сигнал и есть угловая скорость линии визирования. Процесс вычисления может быть реализован на основе стандартных усилителей, RC- цепочек и интеграторов.
Исполнительные органы (12, 19) - реактивные двигатели, применяемые на ОК “Мир” и кораблях “Союз ТМ”.
В качестве устройств измерения дальности и скорости сближения (5, 7) может использоваться радиоаппаратура, применяемая на ОК "МИР" и кораблях "Союз ТМ".
Блок управления ориентацией ПК (11), блок управления ориентацией (18), блок управления движением центра масс (18), функционально имеющие одно и то же назначение, могут быть выполнены с помощью схем сравнения, стандартных усилителей и сумматоров. В каждом из этих блоков входная информация состоит из параметра управления (угла) и его производной (угловой скорости). В каждом из блоков управление может формироваться используемым обычно приемом - созданием управляющего сигнала, равного
S=U+K·W
где S - управляющий сигнал;
U - угол рассогласования;
W - скорость рассогласования;
К - коэффициент демпфирования.
При превышении управляющим сигналом заданной точности управления релейный элемент формирует команду на включение исполнительных органов.
Блок управления скоростью сближения (17) может быть выполнен на основе стандартных усилителей, сумматоров и релейных элементов. На участке причаливания программное изменение скорости сближения от дальности может быть представлено в виде переключения максимально и минимально допустимых значений скорости, которые изменяются на заранее определенной дальности. При причаливании достаточно двух переключений на дальности 100 и 50 м.
В диапазоне дальности:
200 - 100 м допустимая скорость должна лежать в пределах 1-2 м/с;
100 - 50 м допустимая скорость должна лежать в пределах 0,5 -1 м/с;
50 - 0 м допустимая скорость должна лежать в пределах 0,1 - 0,3 м/с.
Блок вычисления угла рассогласования (15) может быть выполнен на основе стандартных усилителей и сумматоров.
Блок вычисления угловой скорости линии визирования (16) может быть выполнен на основе стандартных усилителей, сумматоров, интеграторов.
Блоки коммутации - первый, второй, третий, четвертый и пятый (блоки 21, 22, 24, 27 и 29) могут быть выполнены на основе стандартных усилителей и реле постоянного тока с нормально замкнутыми и нормально разомкнутыми контактами, с помощью которых и производятся необходимые переключения.
Блоки определения моментов окончания коррекции и блок определения дальности коррекции (24, 25 и 26) могут быть выполнены на основе стандартных релейных усилителей, которые запитывают реле постоянного тока с нормально замкнутыми и нормально разомкнутыми контактами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104233C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104234C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2002 |
|
RU2225812C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1998 |
|
RU2131387C1 |
| СПОСОБ ПОЛУАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2015 |
|
RU2605231C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ | 2011 |
|
RU2482033C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2009 |
|
RU2412872C1 |
Изобретение относится к космической технике и может быть использовано для стыковки кооперируемых активного (АК) и пассивного (ПК) космических аппаратов. Предлагаемая система включает в себя блоки выдачи углов рассогласования ПК и АК относительно линии визирования, а также блоки выдачи дальности и скорости сближения. Одна часть указанных блоков размещена на АК, а другая на ПК. На ПК также имеются блоки задания и управления ориентацией, датчик угловых скоростей и исполнительные органы. Аналогичные элементы размещены на АК и кроме того - блоки вычисления углов и угловой скорости линии визирования, управления движением центра масс АК и скоростью сближения, определения дальности коррекции. При этом в систему введены два блока определения моментов окончания коррекции, блок вычисления положения центра масс АК, а также пять блоков коммутации. Связь и взаимодействие блоков обеспечивают управление скоростью сближения АК и ПК в зависимости от дальности, а боковым движением АК - по углам и угловой скорости линии визирования. Введена коррекция ошибок по углам рассогласования ПК и АК относительно линии визирования. В предлагаемой системе управления ориентация АК и ПК определяется в единой (орбитальной) системе координат, поправки к положению которой вводятся как углы разворота АК при обнулении указанных углов рассогласования. Технический результат изобретения состоит в повышении точности стыковки, при устранении связи между ошибками измерения дальности и управления боковым движением центра масс АК. 1 ил.
Система автоматического управления причаливанием, включающая в свой состав блоки выдачи углов рассогласования пассивного корабля (ПК) и активного корабля (АК) относительно линии визирования, при этом одна часть указанных блоков размещена на АК, а другая часть на ПК, блоки выдачи дальности и скорости сближения, одна часть которых размещена на АК, а другая часть на ПК, а также установленные на ПК блок задания ориентации ПК, датчик угловых скоростей, блок управления ориентацией и исполнительные органы, причем выход блока задания ориентации ПК, к входу которого подключен выход датчика угловых скоростей, через блок управления ориентацией, ко второму входу которого подключен выход датчика угловых скоростей, соединен с исполнительными органами, установленные на АК блоки задания ориентации АК, вычисления углов и угловой скорости линии визирования, управления движением центра масс АК, его ориентацией и скоростью сближения, датчик угловых скоростей, блок определения дальности коррекции и исполнительные органы, причем выход блока выдачи углов рассогласования АК соединен с блоком вычисления углов линии визирования, и через блок вычисления угловой скорости линии визирования и блок управления движением центра масс соединен с исполнительными органами, выход датчика угловых скоростей соединен с блоками задания ориентации АК и вычисления угловой скорости линии визирования, и через блок управления ориентацией - с исполнительными органами, выход блока задания ориентации АК соединен с блоком вычисления углов линии визирования, выходы блоков выдачи дальности и скорости сближения через блок управления скоростью сближения соединены с исполнительными органами, а выход блока выдачи дальности соединен также с блоком определения дальности коррекции, отличающаяся тем, что в нее введены два блока определения моментов окончания коррекции, блок вычисления положения центра масс АК, а также первый, второй, третий, четвертый и пятый блоки коммутации, причем выход блока выдачи углов рассогласования ПК подключен ко входам первого и второго блоков коммутации и через первый блок коммутации соединен с входом первого блока определения момента окончания коррекции, а через второй блок коммутации, к другим входам которого подключены выходы указанных блоков вычисления углов линии визирования и положения центра масс, соединен с блоком управления движением центра масс, выход блока выдачи углов рассогласования АК подключен ко входам третьего и пятого блоков коммутации и через третий блок коммутации соединен со вторым блоком определения момента окончания коррекции, а через пятый блок коммутации, к другому входу которого подключен выход блока задания ориентации АК, соединен с блоком управления ориентацией АК, выход блока вычисления угловой скорости линии визирования через четвертый блок коммутации соединен с блоком вычисления положения центра масс АК, выход блока определения дальности коррекции (f) соединен с входами первого и второго блоков коммутации, выход первого блока определения моментов окончания коррекции (m) соединен со входами второго, третьего, четвертого и пятого блоков коммутации, выход второго блока определения моментов окончания коррекции (n) соединен с входами второго и пятого блоков коммутации, а также с блоком задания ориентации АК.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1998 |
|
RU2131387C1 |
| РАУШЕНБАХ Б.В., ЛЕГОСТАЕВ В.П | |||
| Автоматическая система управления сближением | |||
| Космич | |||
| исследования т | |||
| VII, вып | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 3285533 А, 15.11.1966 | |||
| US 3794270 А, 26.02.1974. | |||

